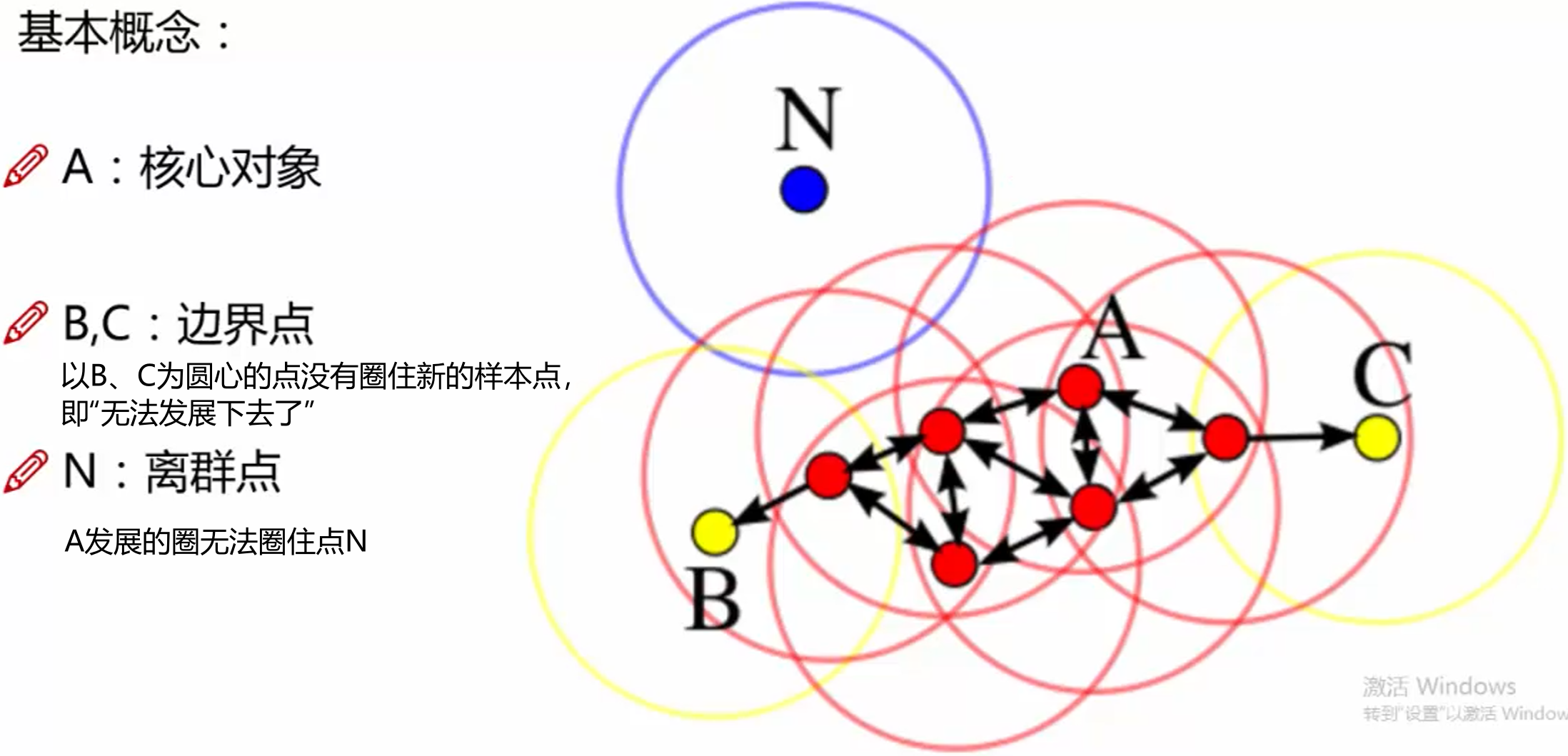
基本概念
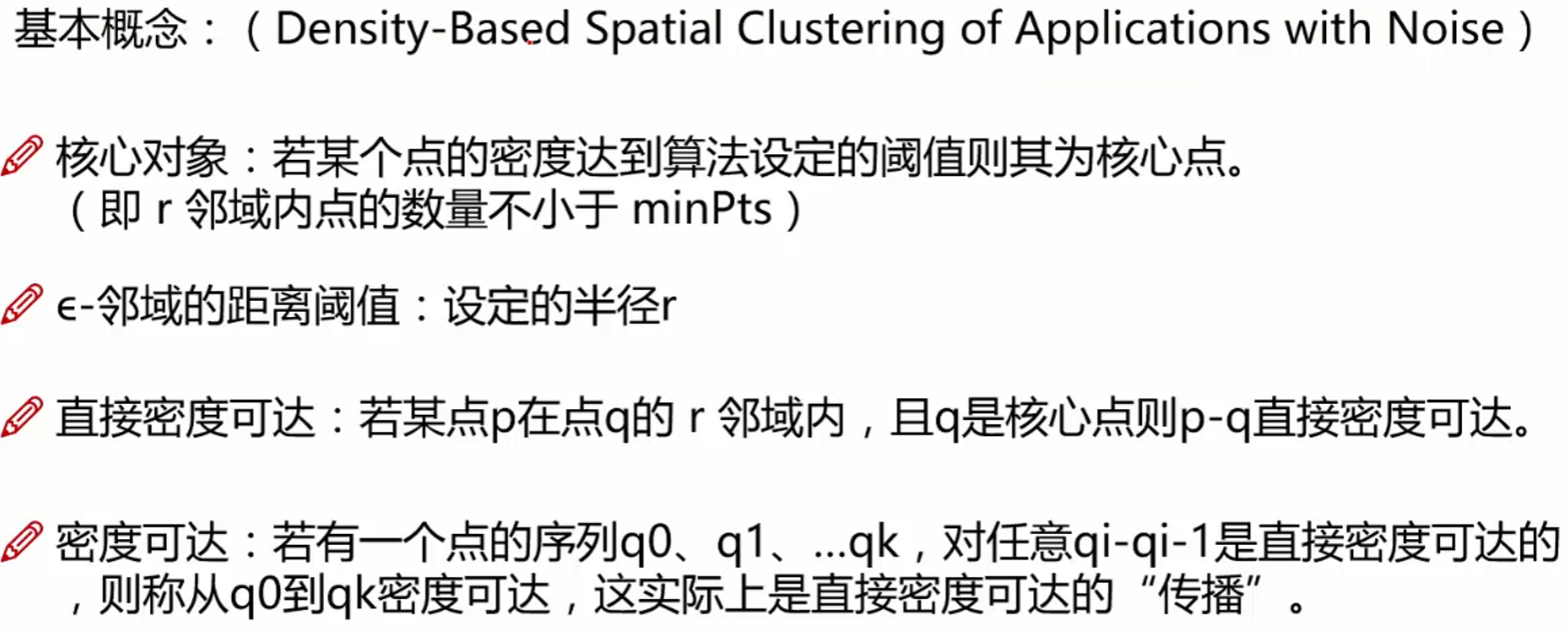
核心对象:以点为圆心半径为r的圆,如果圈里面的样本点大于给定的阈值(minPts),那么这个点就叫做核心点
直接密度可达:点p在q为圆心的圆内
密度可达:
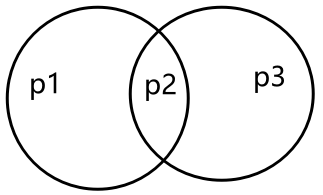
p1与p2直接密度可达,p2与p3直接密度可达,所以p1与p3被称为密度可达
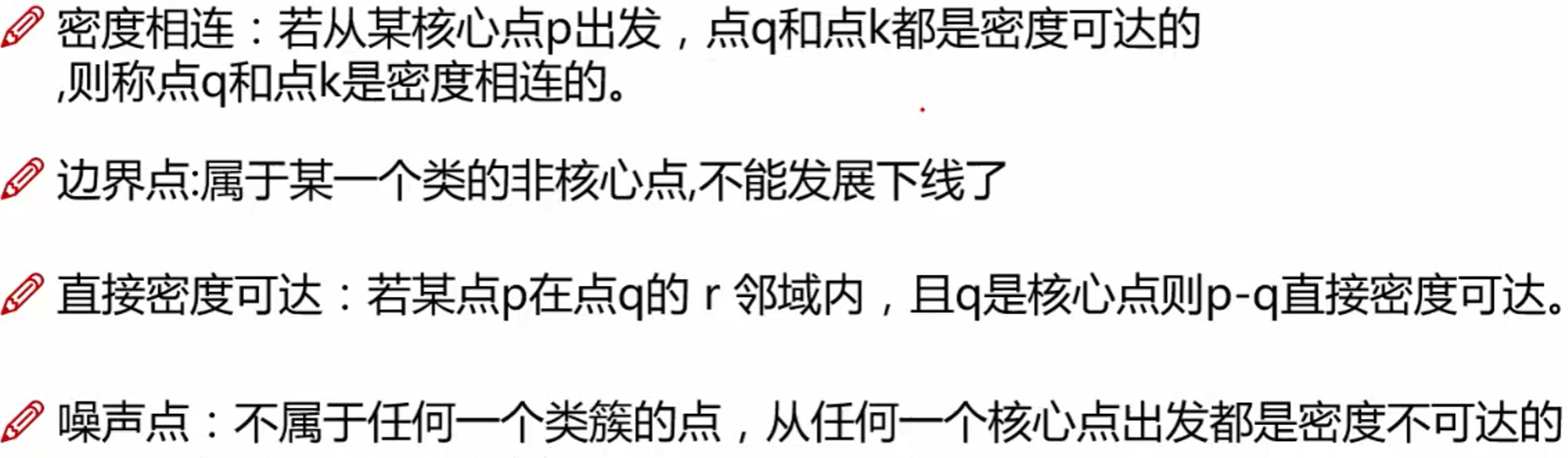
边界点:
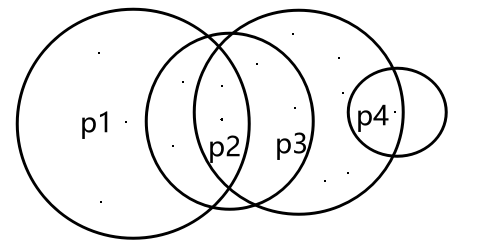
以p1为核心点的圈含p2,p2自己为核心点也有对应圈,并且圈内有点p3,同样p3也有以p3为核心点的圈,并且有点p4,这说明点p1,p2,p3是可以发展下去的点(我认为可以理解成以之前圈住点为圆心画圈不断圈住新的点)
但是p4就不行了,因为以p4为核心点的圈内没有其他样本点或者说样本点的个数少于规定的阈值MinPts,没有继续“发展”下去
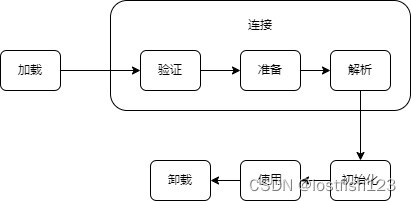
工作流程
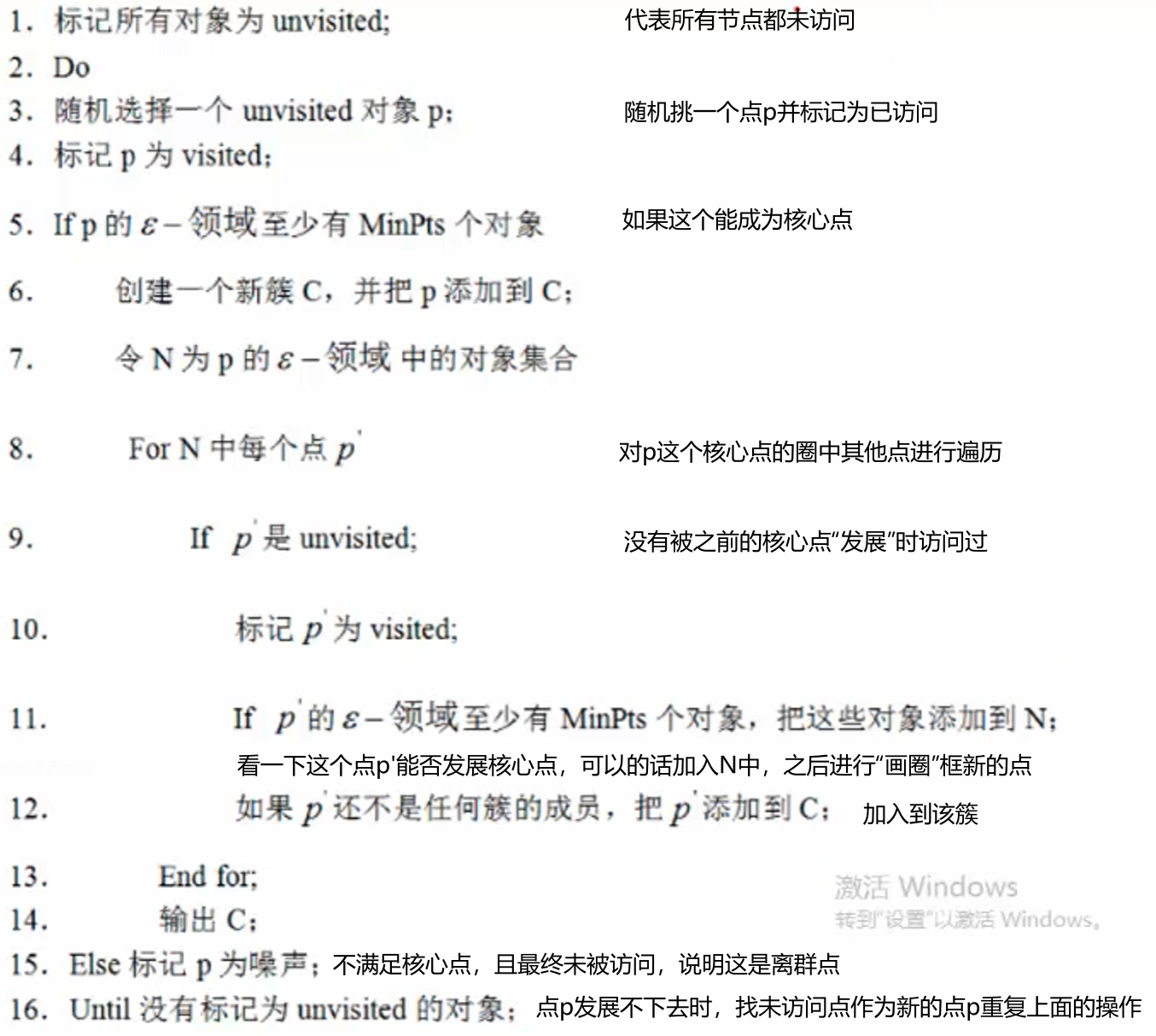
算法
需要输入的数据
参数D:输入数据集
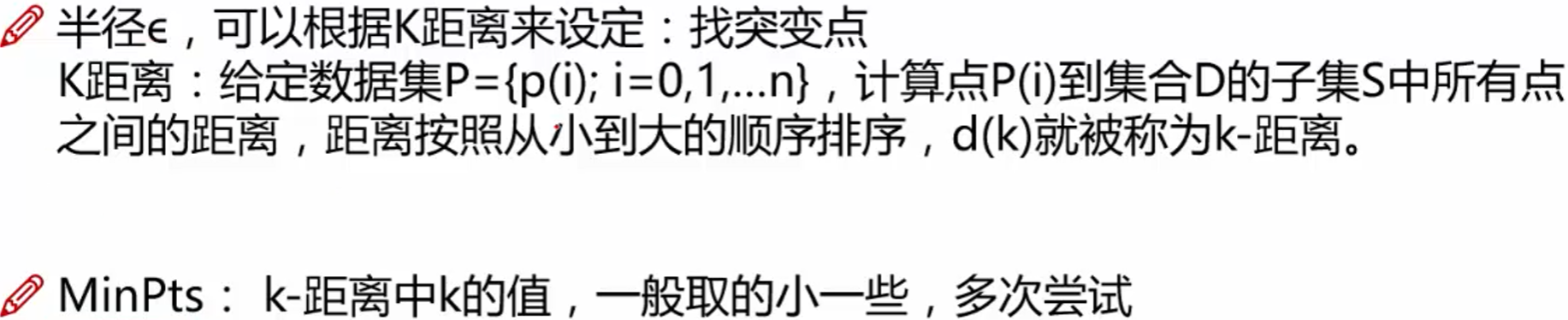
参数:指定半径
MinPts:密度阈值
如何选择参数,基本上都是不断尝试
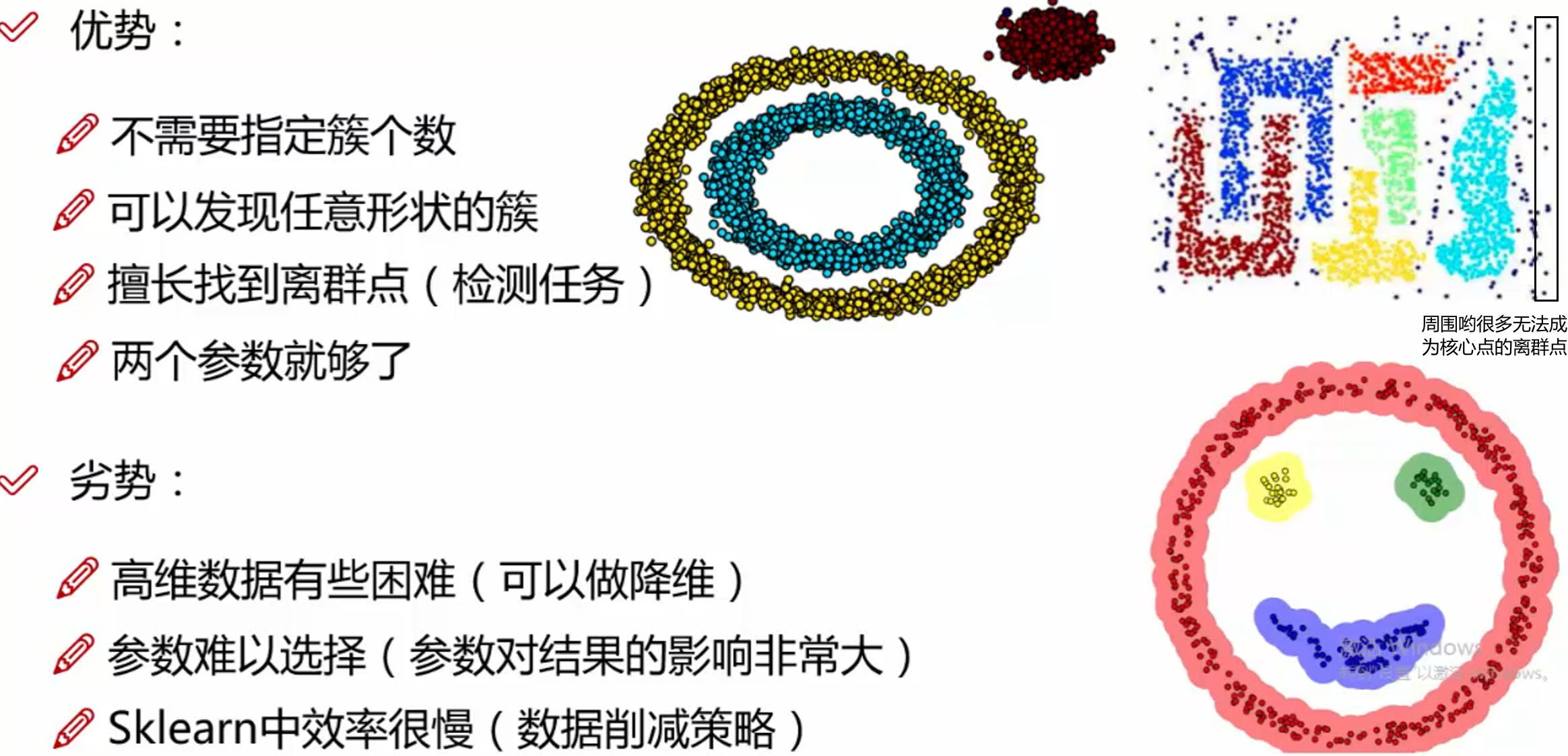
优势和劣势
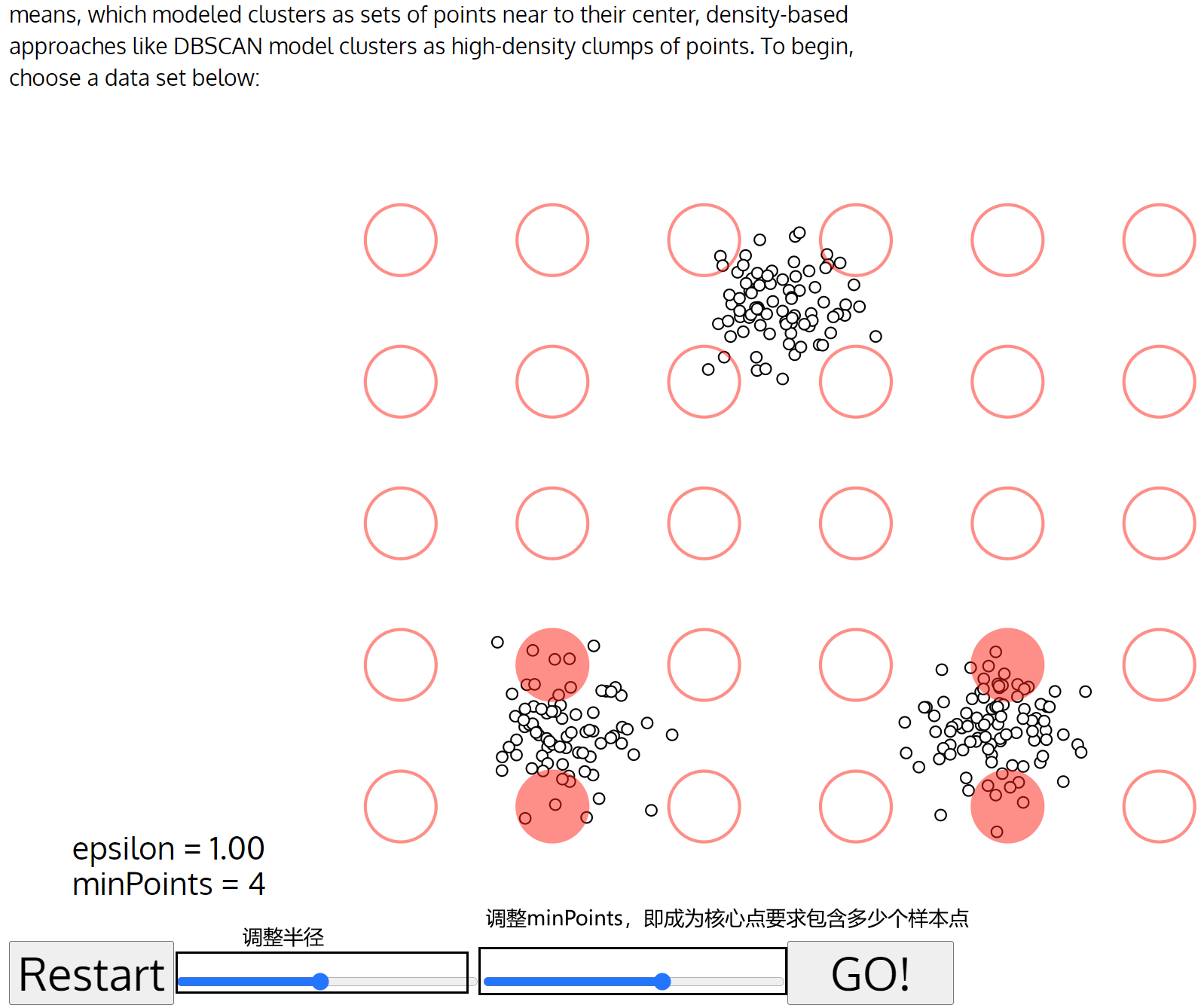
可视化展示
Visualizing DBSCAN Clustering
Gaussian Mixture
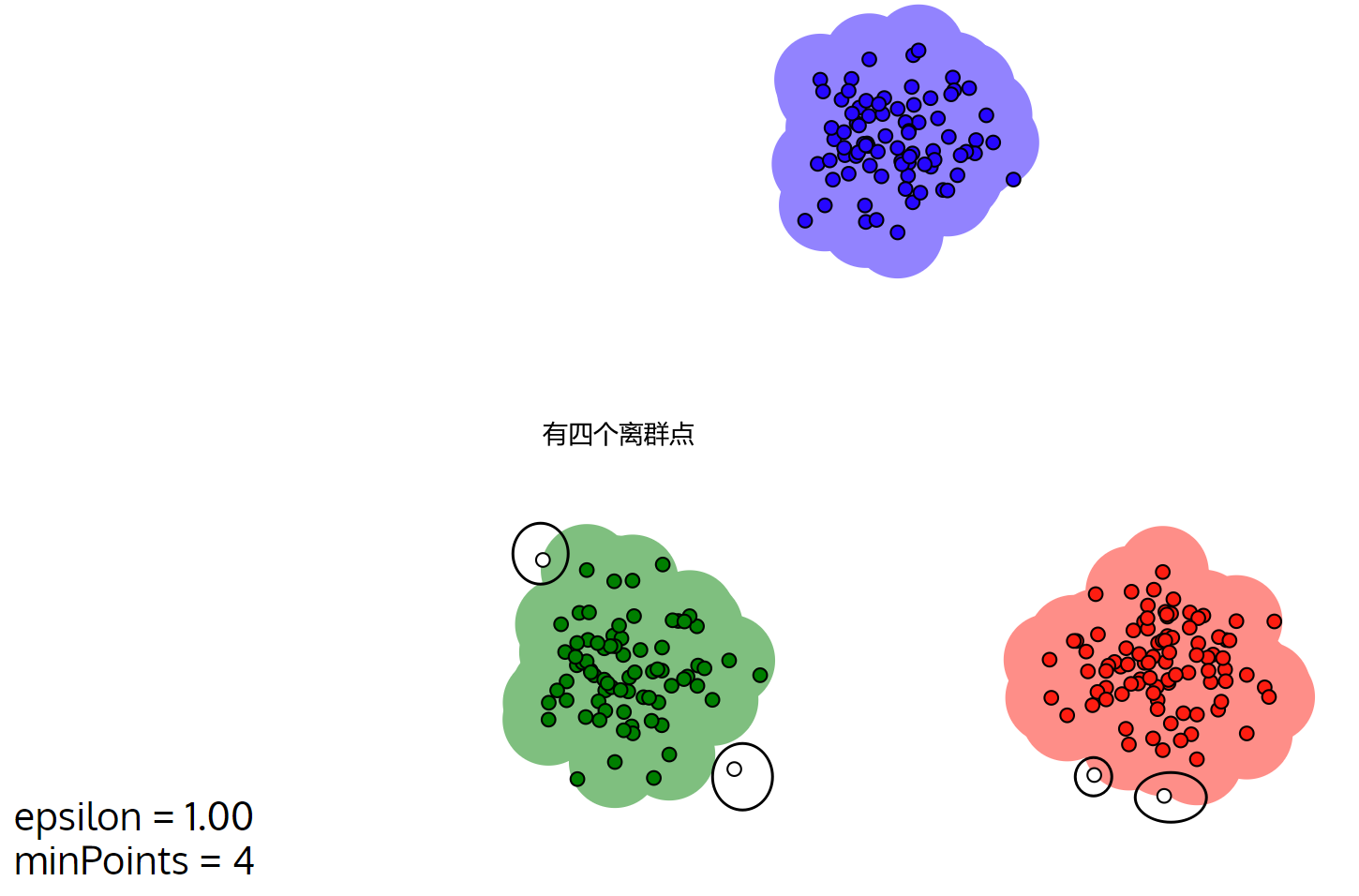
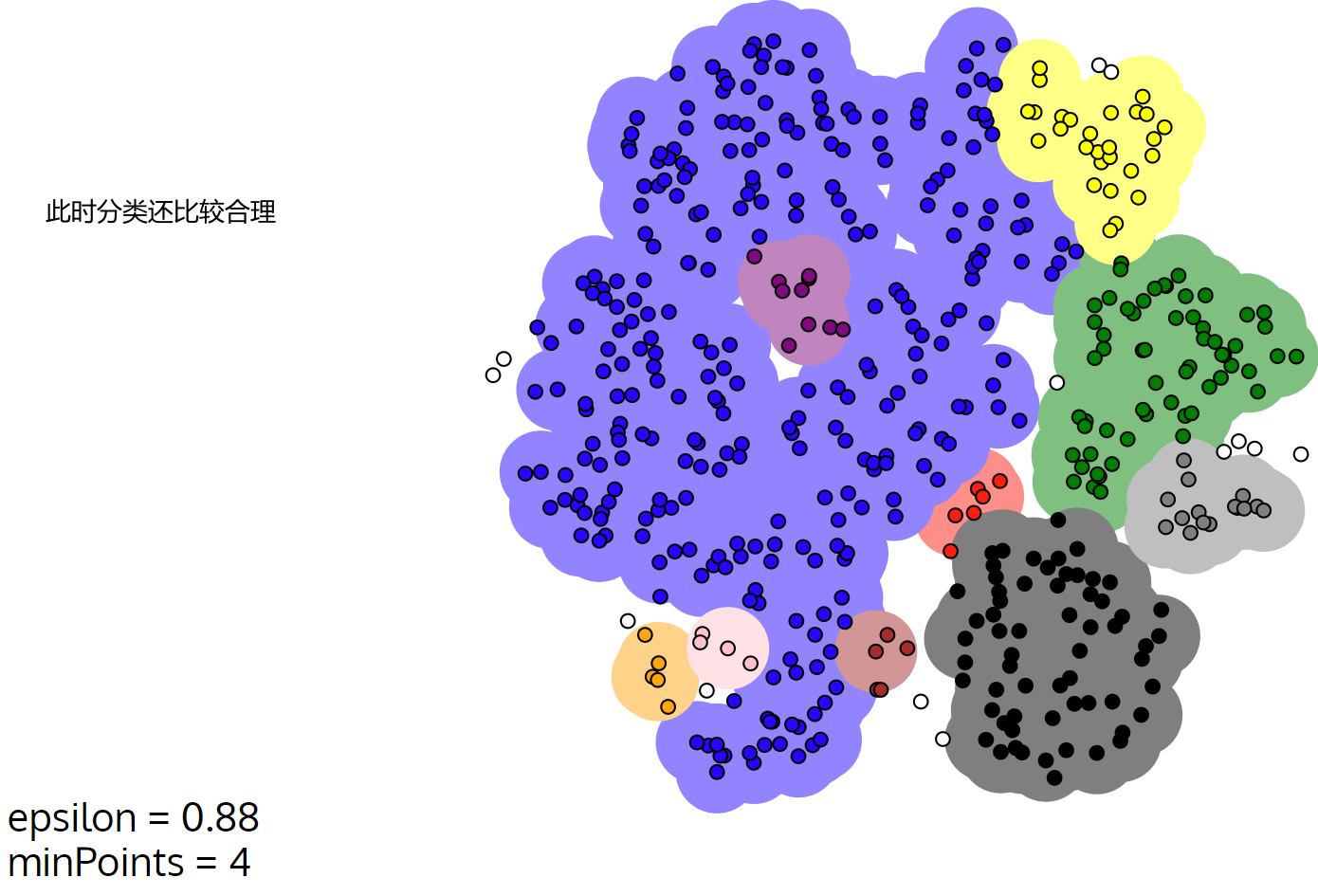
如下图所示,调大半径epsilon之后,离群点就变小了
如果想用DESCAN算法找离群点,可以考虑将半径调小

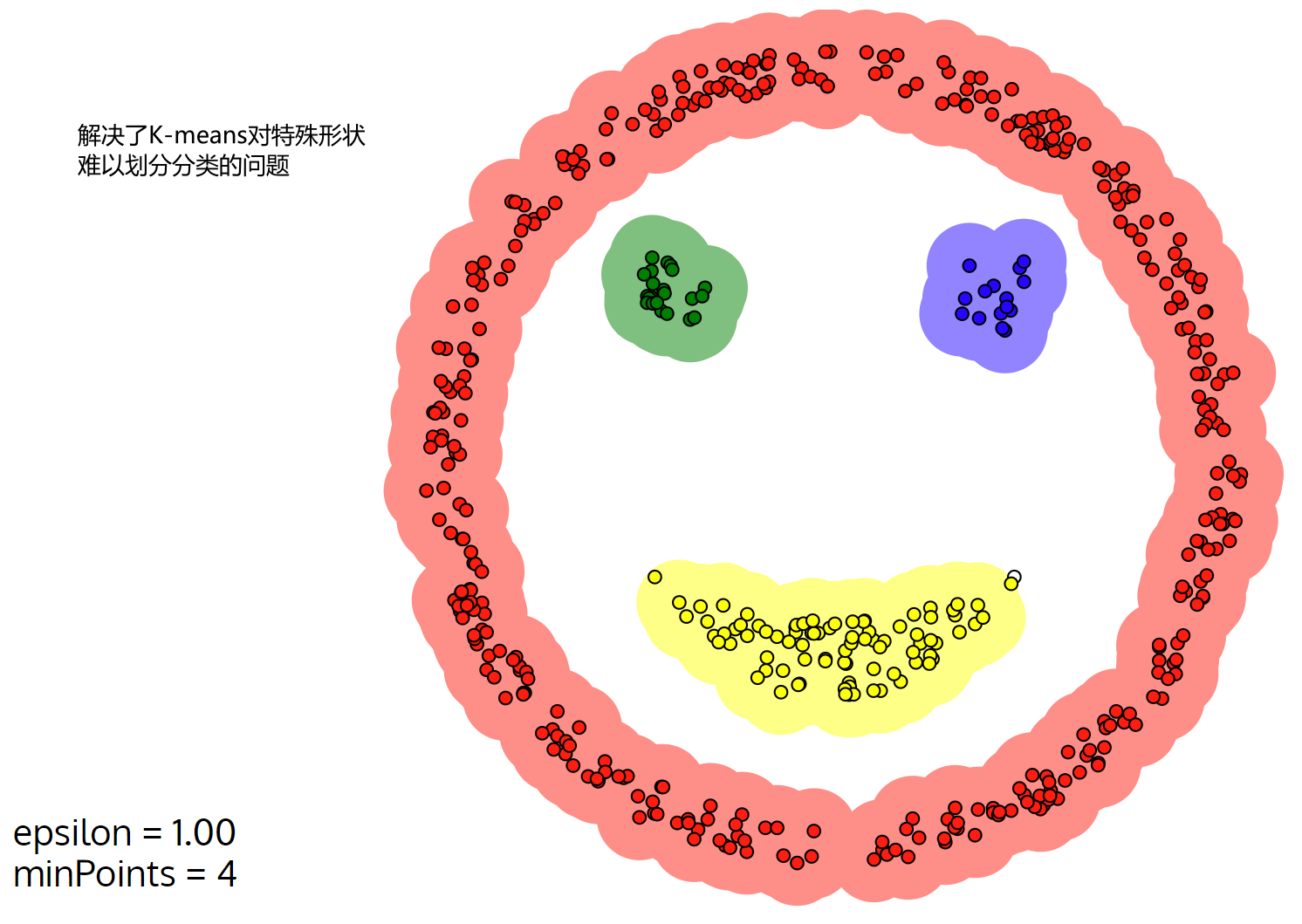
Smiley Face
Packed Circles
但对于这种密集区域此时,DBSCAN分类就不如K-means
半径小了,就出现分类很多的情况;半径大了,就出现分类只有一两个的情况,还不如直接K-means直接给定分类的类别



![【攻防世界-misc】[简单] 凯撒大帝在培根里藏了什么](https://img-blog.csdnimg.cn/direct/5f7f8a4d25094377b156f80ef7e0650b.png)