0. 简介
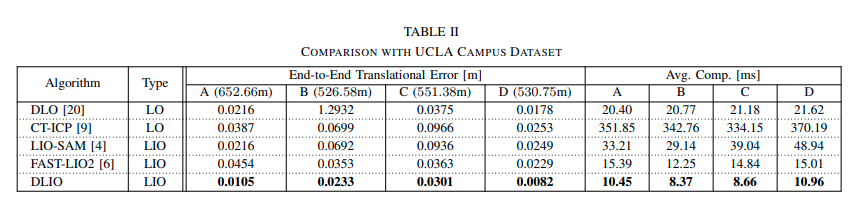
我们刚刚了解过DLIO的整个流程,我们发现相比于Point-LIO而言,这个方法更适合我们去学习理解,同时官方给出的结果来看DLIO的结果明显好于现在的主流方法,当然指的一提的是,这个DLIO是必须需要六轴IMU的,所以如果没有IMU的画,那只有DLO可以使用了。
1. computeMetrics、computeSpaciousness、computeSpaciousness–计算度量指标
下面的代码包含了计算稀疏度和密度的两个函数。这里面的GICP相关的值都是上一帧的结果传入的。computeSpaciousness函数通过计算点云数据中点到原点的距离,求出其中位数,并对其进行平滑处理,最终将结果存入metrics.spaciousness中。而computeDensity函数则根据是否完成GICP优化,来获取机器人当前的密度值,并同样进行平滑处理,最终将结果存入metrics.density中。这两个指标都是用于评价机器人定位精度的重要指标。
void dlio::OdomNode::computeMetrics() {
this->computeSpaciousness(); //计算稀疏度
this->computeDensity(); //计算密度
}
void dlio::OdomNode::computeSpaciousness() {
// 计算点的范围
std::vector<float> ds;
for (int i = 0; i <= this->original_scan->points.size();
i++) { //根据getScanFromROS拿到的原始点云数据
float d = std::sqrt(
pow(this->original_scan->points[i].x, 2) +
pow(this->original_scan->points[i].y, 2)); //计算点到原点的距离
ds.push_back(d); //将距离存入ds
}
// 求中值
std::nth_element(
ds.begin(), ds.begin() + ds.size() / 2,
ds.end()); // 用于在一个序列中找到第k小的元素,其中k由第二个参数指定
float median_curr = ds[ds.size() / 2]; //对应的中值的索引
static float median_prev = median_curr; //存入到上一个时刻的中值
float median_lpf =
0.95 * median_prev + 0.05 * median_curr; //?算出来还是一个值
median_prev = median_lpf; //同理
// push
this->metrics.spaciousness.push_back(median_lpf);
}
void dlio::OdomNode::computeDensity() {
float density;
if (!this->geo
.first_opt_done) { //如果第一次优化未完成(没有完成GICP),则认为没有密度
density = 0.;
} else {
density = this->gicp.source_density_; //将GICP累计的density传入
}
static float density_prev = density;
float density_lpf = 0.95 * density_prev + 0.05 * density;
density_prev = density_lpf;
this->metrics.density.push_back(density_lpf);
}
2. buildSubmap–构建子图
构建子地图的函数。子地图是由一组关键帧组成的,这些关键帧被用于后续的GICP匹配。该函数首先计算当前姿态与关键帧集合中的姿态之间的距离,以确定哪些关键帧应该被包含在子地图中。然后,它使用计算出的距离来获取前K个最近邻关键帧姿态的索引。接下来,它获取凸包索引,即提取一些不必要的关键帧。然后,它获取凸包上每个关键帧之间的距离,并获取凸包的前k个最近邻的索引。接下来,它获取凹包索引,即提取一些不必要的关键帧。然后,它获取凹包上每个关键帧之间的距离,并获取凹包的前k个最近邻的索引。最后,它连接所有子地图的点云和法向量,重新初始化子地图云和法线,并将当前子地图云赋值给子地图的点云,将当前子地图的法向量赋值给子地图的法向量,将子地图的点云赋值给gicp_temp的目标点云,将gicp_temp的目标点云的kd树赋值给子地图的kd树,将当前帧的索引赋值给上一帧的索引。如果子地图与上一次迭代时发生了变化,则将标志位置为true。并将相应的值传给GICP
void dlio::OdomNode::buildSubmap(State vehicle_state) {
// 清除用于子地图的关键帧索引向量
this->submap_kf_idx_curr.clear();
// 计算当前姿态与关键帧集合中的姿态之间的距离
std::unique_lock<decltype(this->keyframes_mutex)> lock(
this->keyframes_mutex); //通过decltype关键字可以获得变量的类型,并加上互斥锁
std::vector<float> ds; //用于存储当前帧与关键帧之间的距离
std::vector<int> keyframe_nn; //用于存储当前帧与关键帧之间的索引
for (int i = 0; i < this->num_processed_keyframes;
i++) { //获取当前时刻所有的关键帧
float d =
sqrt(pow(vehicle_state.p[0] - this->keyframes[i].first.first[0], 2) +
pow(vehicle_state.p[1] - this->keyframes[i].first.first[1], 2) +
pow(vehicle_state.p[2] - this->keyframes[i].first.first[2],
2)); //计算当前帧与关键帧之间的距离
ds.push_back(d); //将距离存入ds
keyframe_nn.push_back(i); //将索引存入keyframe_nn
}
lock.unlock();
// 获取前K个最近邻关键帧姿态的索引
this->pushSubmapIndices(ds, this->submap_knn_, keyframe_nn);
// 获取凸包索引,其实就是提取一些不必要的关键帧
this->computeConvexHull();
// 获取凸包上每个关键帧之间的距离
std::vector<float> convex_ds;
for (const auto &c : this->keyframe_convex) {
convex_ds.push_back(ds[c]); //根据对应的索引将结果压入
}
// 获取凸包的前k个最近邻的索引
this->pushSubmapIndices(convex_ds, this->submap_kcv_, this->keyframe_convex);
// 获取凹包索引,其实就是提取一些不必要的关键帧
this->computeConcaveHull();
// 获取凸包上每个关键帧之间的距离
std::vector<float> concave_ds;
for (const auto &c : this->keyframe_concave) {
concave_ds.push_back(ds[c]);
}
// 获取凹包的前k个最近邻的索引
this->pushSubmapIndices(concave_ds, this->submap_kcc_,
this->keyframe_concave);
// 连接所有子地图的点云和法向量
std::sort(this->submap_kf_idx_curr.begin(),
this->submap_kf_idx_curr.end()); //对当前帧的索引进行排序
auto last = std::unique(this->submap_kf_idx_curr.begin(),
this->submap_kf_idx_curr.end()); //去除重复的元素
this->submap_kf_idx_curr.erase(
last, this->submap_kf_idx_curr.end()); //删除重复的元素
// 对当前和之前的子地图的索引列表进行排序
std::sort(this->submap_kf_idx_curr.begin(), this->submap_kf_idx_curr.end());
std::sort(this->submap_kf_idx_prev.begin(), this->submap_kf_idx_prev.end());
// 检查子地图是否与上一次迭代时发生了变化
if (this->submap_kf_idx_curr != this->submap_kf_idx_prev) {
this->submap_hasChanged = true; //如果发生了变化,则将标志位置为true
// 暂停以防止从主循环中窃取资源,如果主循环正在运行。
this->pauseSubmapBuildIfNeeded();
// 重新初始化子地图云和法线
pcl::PointCloud<PointType>::Ptr submap_cloud_(
boost::make_shared<pcl::PointCloud<PointType>>());
std::shared_ptr<nano_gicp::CovarianceList> submap_normals_(
std::make_shared<nano_gicp::CovarianceList>());
for (auto k : this->submap_kf_idx_curr) { //遍历当前帧的索引
// 创建当前子地图云
lock.lock();
*submap_cloud_ += *this->keyframes[k].second; //将当前帧的点云压入
lock.unlock();
// 获取相应子地图云点的法向量
submap_normals_->insert(std::end(*submap_normals_),
std::begin(*(this->keyframe_normals[k])),
std::end(*(this->keyframe_normals[k])));
}
this->submap_cloud = submap_cloud_; //将当前帧的点云赋值给子地图的点云
this->submap_normals =
submap_normals_; //将当前帧的法向量赋值给子地图的法向量
// 如果主循环正在运行,请暂停以防止窃取资源
this->pauseSubmapBuildIfNeeded();
this->gicp_temp.setInputTarget(
this->submap_cloud); //将子地图的点云赋值给gicp_temp的目标点云
this->submap_kdtree =
this->gicp_temp
.target_kdtree_; //将gicp_temp的目标点云的kd树赋值给子地图的kd树
this->submap_kf_idx_prev =
this->submap_kf_idx_curr; // 将当前帧的索引赋值给上一帧的索引
}
}
3. buildKeyframesAndSubmap–创建子图点云和法线的创建
下面代码的主要功能是创建子图,包括子图的点云和法线的创建。首先,程序获取未处理的关键帧,然后将其转换到世界坐标系下。在转换过程中,程序使用了关键帧的变换矩阵和点云数据,通过调用pcl库中的transformPointCloud函数,将关键帧点云转换到世界坐标系下。同时,程序也需要更新关键帧的协方差(法向量),将其同样转换到世界坐标系下。
在转换完成后,程序会发布关键帧。这里使用了std::thread创建了一个线程,并将发布关键帧的函数publishKeyframe作为线程函数,同时传递了关键帧数据和时间戳。这样做是为了避免在主循环中窃取资源。