目录
说明:
1. 话题模型
图示
说明
2. 实现过程(C++)
创建功能包
创建发布者代码(C++)
配置发布者代码编译规则
编译并运行
编译
运行
3. 实现过程(Python)
创建发布者代码(Python版本)
运行velocity_publisher.py文件
运行效果
说明:
1. 本系列学习笔记基于B站:古月居《ROS入门21讲》课程,且使用的Ubuntu与ROS系统版本与课程完全一致;
| 虚拟机版本 | Linux系统版本 | ROS系统版本 |
|---|---|---|
| VMware WorkStation Pro 16 | Ubuntu18.04 | Melodic |
2. 课程中的所有示例代码均已跑通,且对Pyhon版本的代码也都做了运行验证,并附带验证过程(错误均已修正);
3. 本节是整个笔记的第8节,对应视频课程的第10节,请自行对应学习;
4. 整个系列笔记基本已经完结,但部分章节仍需润色修改 ,后面会陆续发布,请大家持续关注, 创作不易,感谢支持!
1. 话题模型
图示
说明
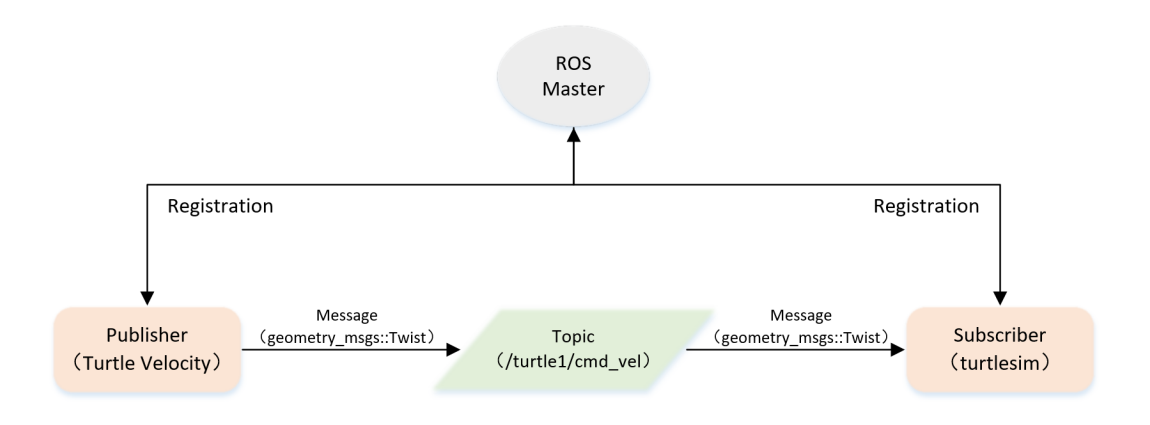
ROS Master:管理所有节点
主要节点:
Publisher(Turtle Velocity): 消息的发布者,后面会通过程序(c++,py)实现发布者发布一个速度消息数据;
Message(geometry_msgs::Twist): 发布者发布的消息数据,Twist会分为线速度和角速度;
Topic(/turtle1/cmd_vel): 消息传输管道,将发布者发布的消息数据传输给订阅者,
让Subscriber(turtlesim)订阅者得到这个消息数据;
Subscriber(turtlesim): 消息的订阅者(海龟仿真器),Subscriber(turtlesim)接收到通过
Topic(/turtle1/cmd_vel)传输来的消息数据Message(geometry_msgs::Twist),
控制海龟的运动。
2. 实现过程(C++)
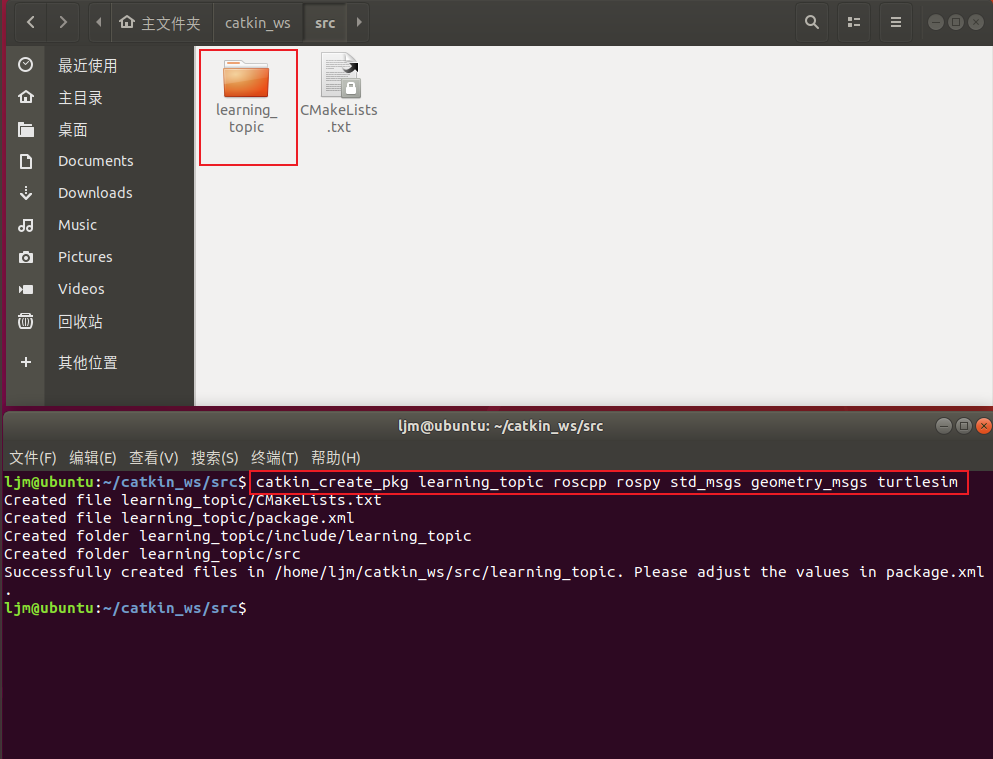
创建功能包
cd ~/catkin_ws/src catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
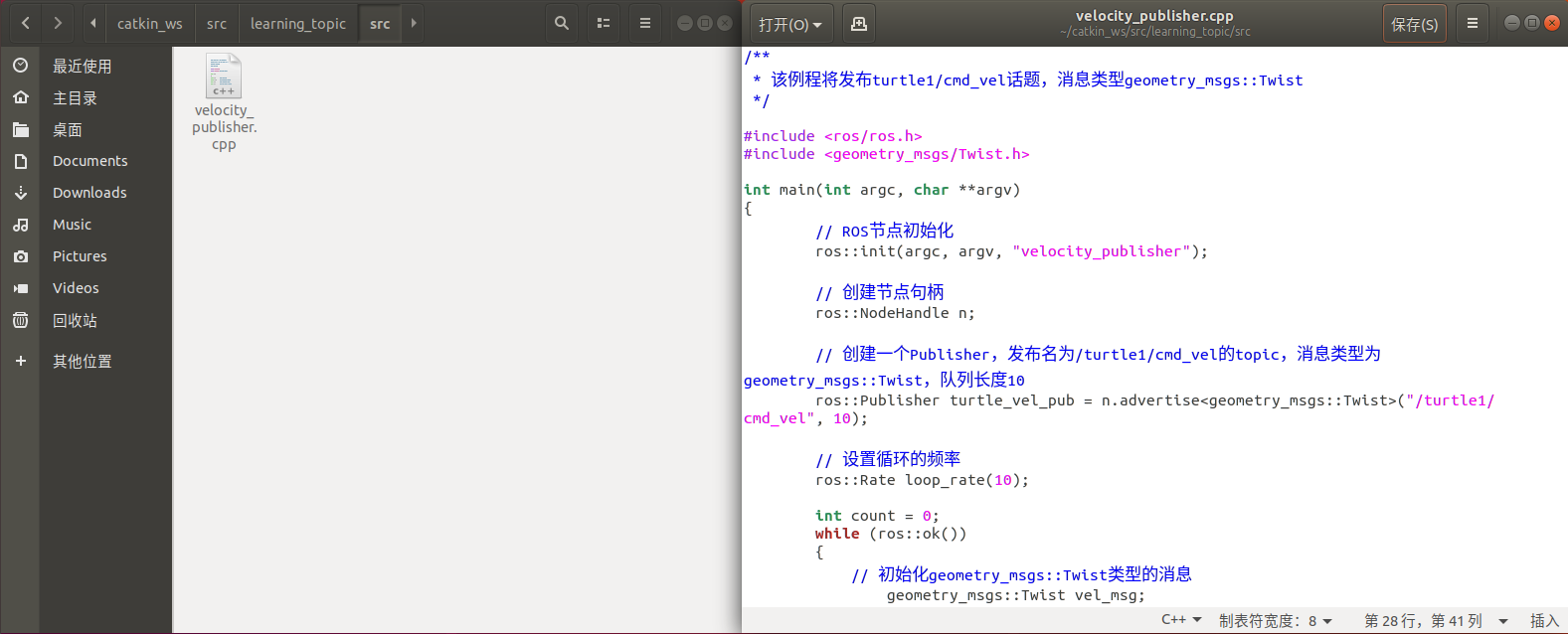
创建发布者代码(C++)
cd ~/catkin_ws/src/learning_topic/src touch velocity_publisher.cpp
-
初始化ROS节点;
-
向ROS Master注册节点信息,包括发布消息的话题名,话题中的消息类型;
-
创建消息数据;
-
按照一定频率循环发布消息,
/**
* 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "velocity_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 定义一个名为turtle_vel_pub的发布者,发布的消息类型为geometry_msgs::Twist,订阅名为/turtle1/cmd_vel的话题,
// 队列长度10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
-
切换工作路径到~/catkin_ws/src/learning_topic/src目录下;
-
创建代码文件velocity_publisher.cpp;
-
复制代码到文件中并保存
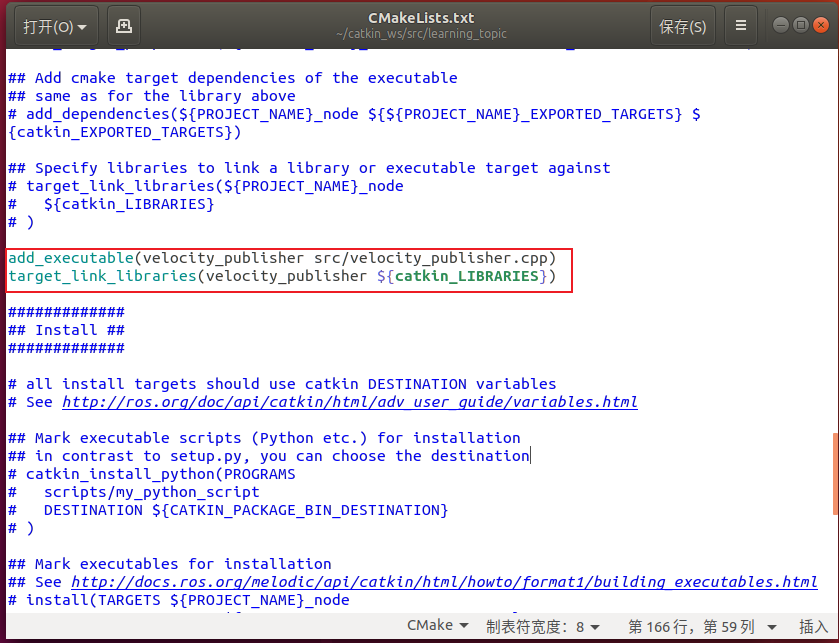
配置发布者代码编译规则
将下面两行代码复制到CMakeLists.txt文件中,
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
上面两行代码的作用:
add_executable: 将src/velocity_publisher.cpp代码文件编译成velocity_publisher可执行文件;
target_link_libraries:把编译生成的可执行文件velocity_publisher跟ROS相关的一些库做连接的,比如调用的C++的接口。
代码要复制到CMakeLists.txt文件中的位置如下:
编译并运行
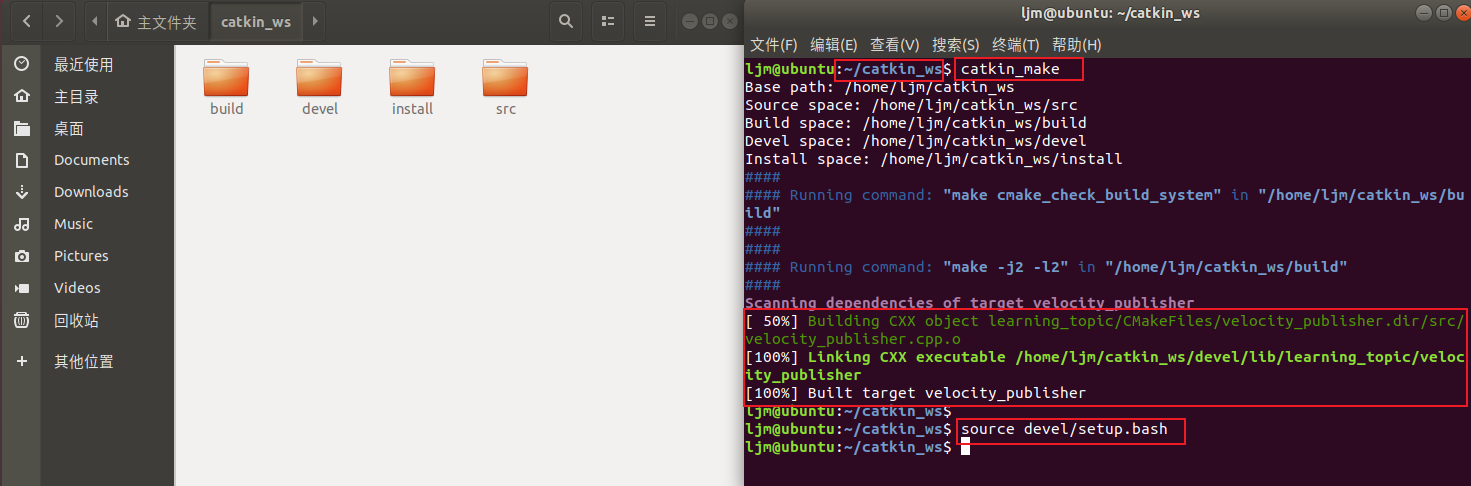
编译
cd ~/catkin_ws catkin_make source devel/setup.bash
-
先把工作路径切换到catkin_ws工作空间目录下;
-
在catkin_ws工作空间目录下catkin_make编译代码文件;
-
source devel/setup.bash 设置环境变量(此步骤很重要,不设置找不到工作空间下功能包的路径);
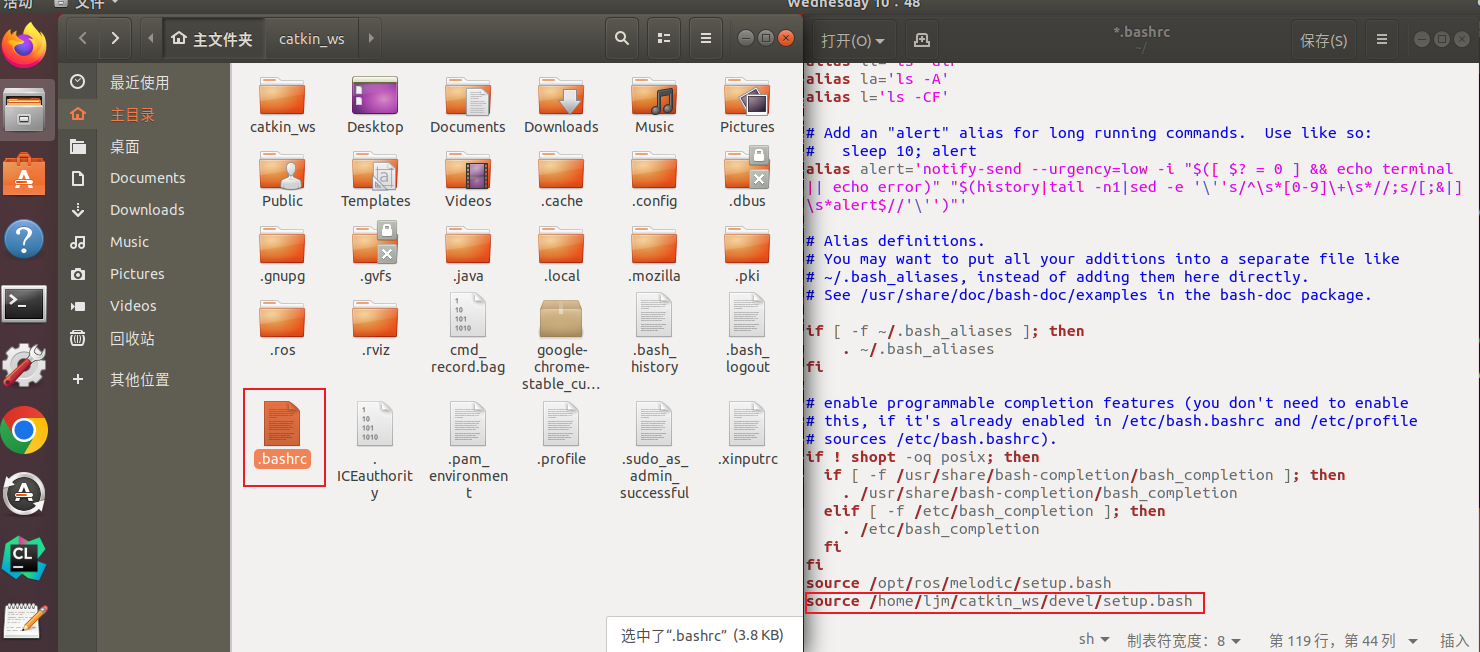
如果不想每次运行程序时都要执行setup.bash文件或怕忘记此步骤,可以把source devel/setup.bash添加到 .bashrc文件中,
.bashrc文件是一个隐藏文件,回到home目录下,ctrl + h,会显示所有的隐藏文件,
注意修改路径,修改路径后具体添加的内容:source /home/自己的用户名/catkin_ws/devel/setup.bash,
添加位置在 .bashrc文件最下面,添加后记得保存,再ctrl + h,恢复隐藏文件,最后要重新启动终端,修改才能生效。
运行
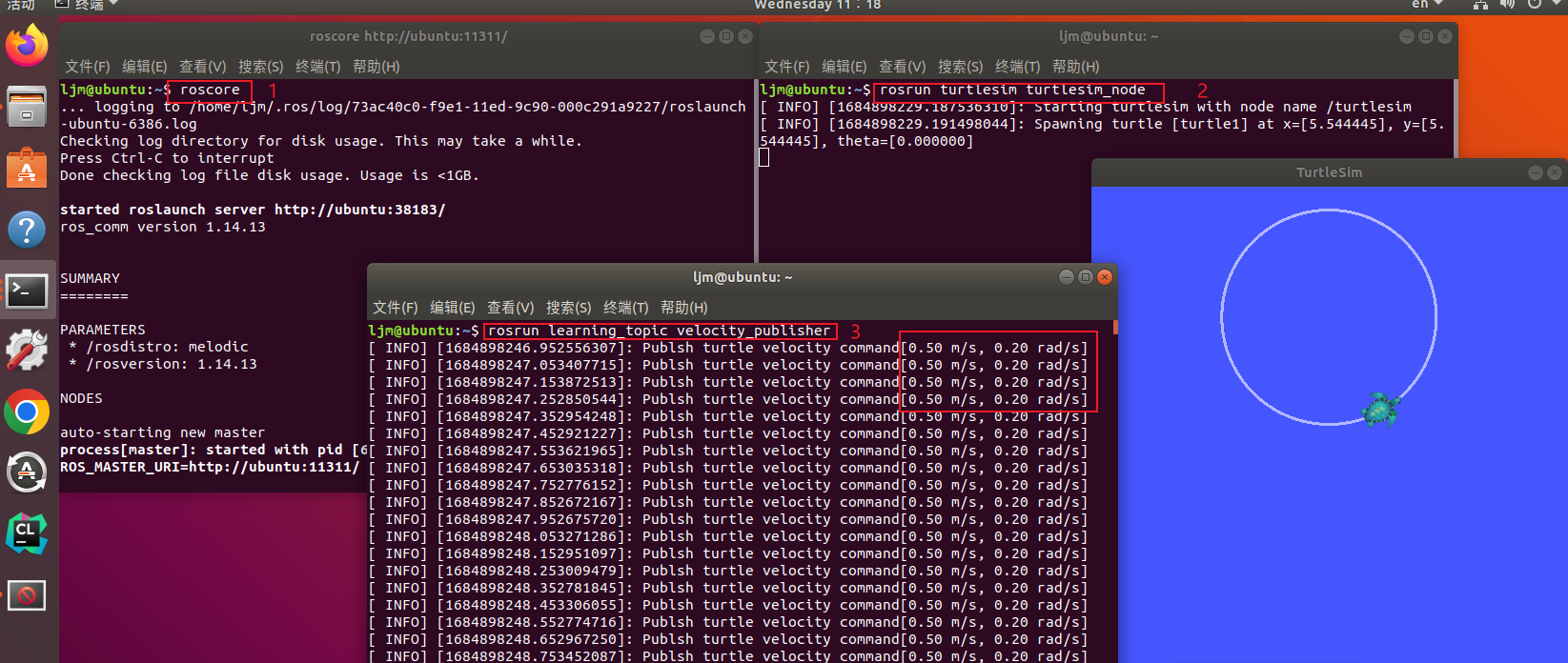
roscore rosrun turtlesim turtlesim_node rosrun learning_topic velocity_publisher
经过上述对.bashrc文件的修改,我们可以在任意的路径下运行我们编译出来的结果文件:过程如下:
-
打开任意终端输入:roscore;
-
运行海龟仿真器,再打开一个新终端输入:rosrun turtlesim turtlesim_node;
-
运行我们编译好的可执行文件,再打开一个新终端输入:rosrun learning_topic velocity_publisher,
这个程序会发布速度指令(包括线速度0.5m/s 和 角速度0.2m/s),使海龟按圆周运动转起来。
我们上面运行的可执行文件的位置在 home/catkin_ws/devel/lib/learning_topic 目录下
3. 实现过程(Python)
创建发布者代码(Python版本)
cd ~/catkin_ws/src/learning_topic mkdir scripts cd ~/catkin_ws/src/learning_topic/scripts touch velocity_publisher.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
import rospy
from geometry_msgs.msg import Twist
def velocity_publisher():
# ROS节点初始化
rospy.init_node('velocity_publisher', anonymous=True)
# 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化geometry_msgs::Twist类型的消息
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
# 发布消息
turtle_vel_pub.publish(vel_msg)
rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
-
先把工作路径切换到~/catkin_ws/src/learning_topic目录下;
-
创建放置Python代码版本发布者的代码文件的文件夹scripts;
-
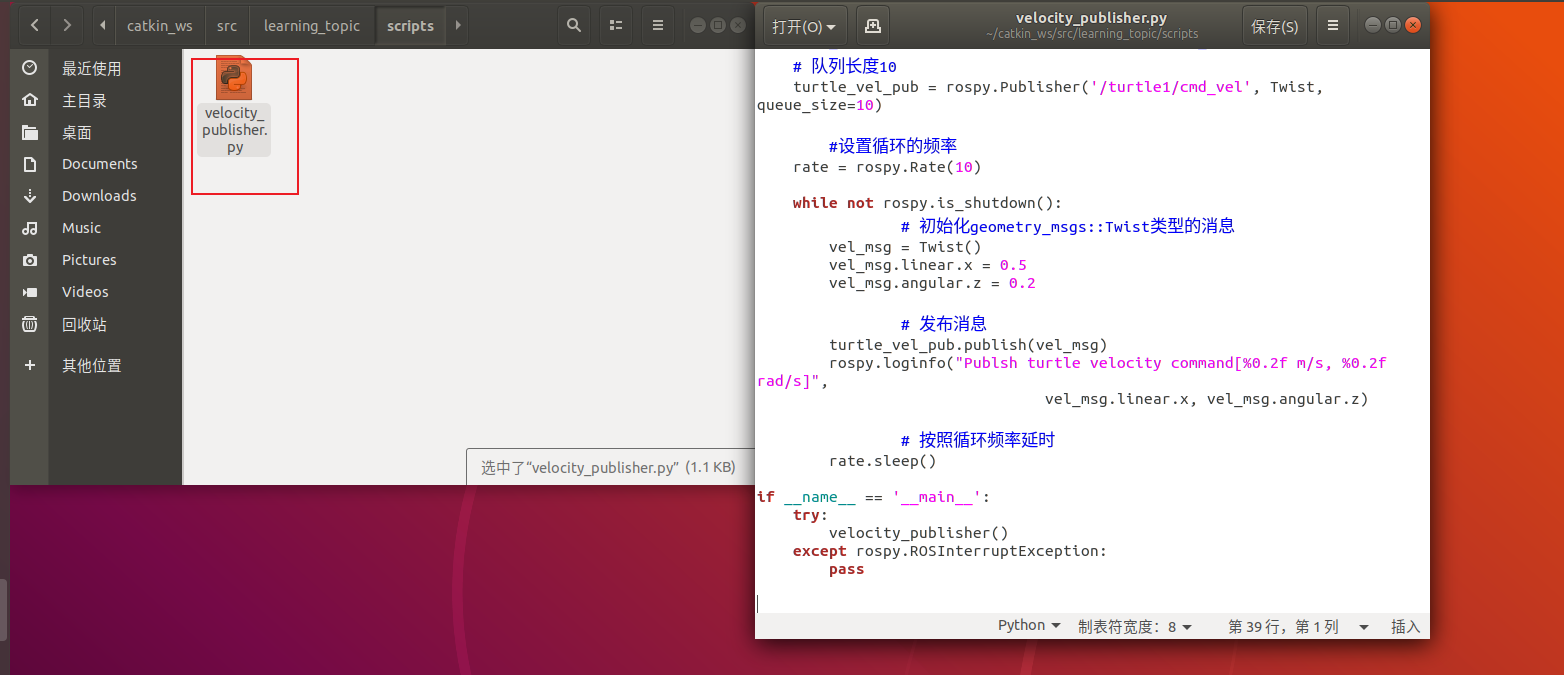
进入scripts文件夹下并创建velocity_publisher.py文件;
-
双击打开velocity_publisher.py文件,复制代码到里面并保存
注意:在ROS中运行python文件,要使其有作为程序文件执行的权限,
点击velocity_publisher.py文件,右键,属性,权限,勾选(允许作为程序文件执行),
python文件不需要编译,直接运行即可。

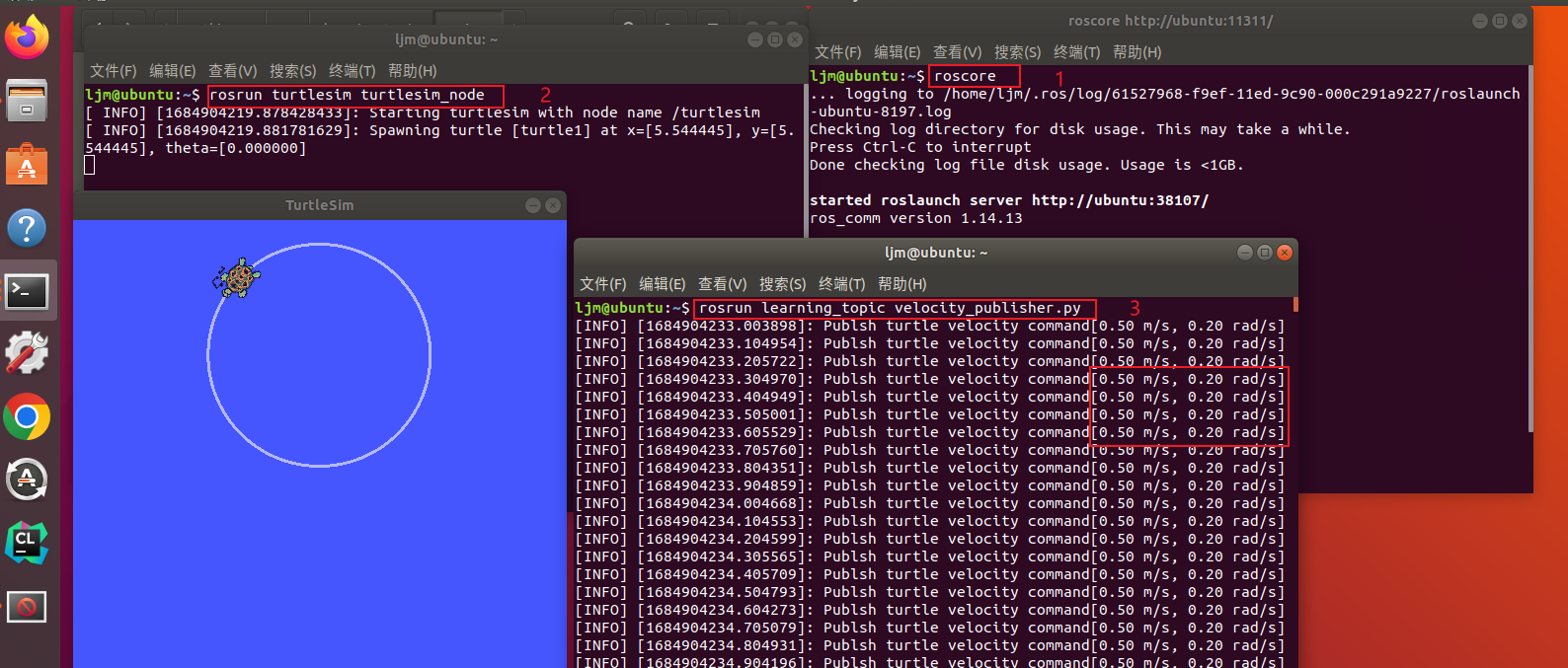
运行velocity_publisher.py文件
roscore rosrun turtlesim turtlesim_node rosrun learning_topic velocity_publisher.py
运行流程和上面c++一样, 只不过把第三步的命令velocity_publisher文件名加上.py后缀
(rosrun learning_topic velocity_publisher.py)
运行效果