livox 半固体激光雷达 gazebo 仿真 | 更换环境与雷达型号
- livox 半固体激光雷达 gazebo 仿真 | 更换环境与雷达型号
- livox 介绍
- 更换环境
- 更换livox激光雷达型号
livox 半固体激光雷达 gazebo 仿真 | 更换环境与雷达型号
livox 介绍
览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业,Livox致力于提供高性能、低成本的激光雷达传感器。通过降低使用门槛和生产成本,Livox将激光雷达技术集成到更多产品和应用之中,从而为自动驾驶、智慧城市、测绘、移动机器人等行业带来创新性改变。Livox产品已销往包括美国、加拿大、中国、日本和欧盟在内的 26 个国家和地区。
面向智能移动机器人市场,Livox 推出最新一代 3D 激光雷达 Mid-360,开启混合固态激光雷达 360° 立体感知新篇章。凭借小巧体积,Mid-360 的安装布置更加灵活。同时,Mid-360 充分考虑了移动机器人对导航、避障等升维感知的需求,兼容室内外场景,赋能移动机器人进入空间智能感知新时代。 但是这款产品官网一直购买不到, 本篇博客 在 gazebo 中 可实现对该激光雷达的仿真 。
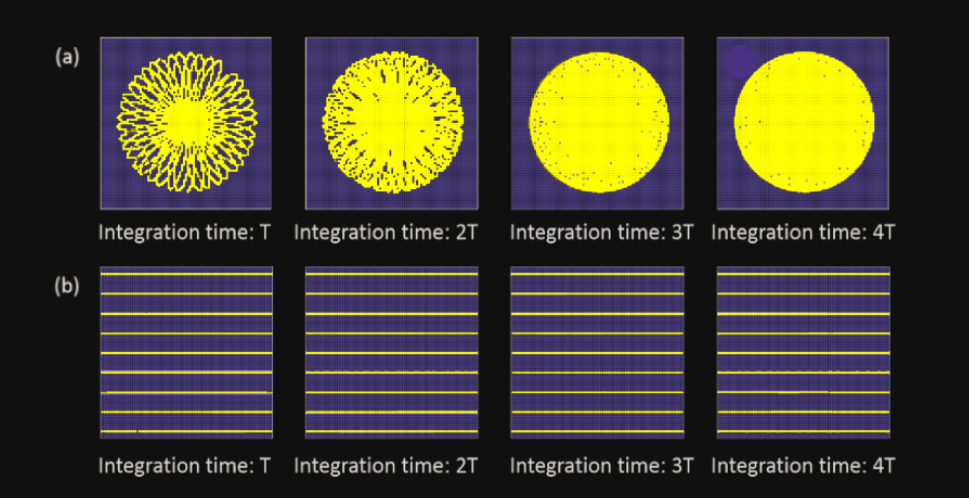
传统激光雷达普遍采用机械扫描方式,扫描路径随时间重复。而Livox 激光雷达采用了独特的扫描⽅式,扫描路径不会重复。在非重复扫描方式中,视场中被激光照射到的区域面积会随时间增大,这意味着视场覆盖率随时间推移而显著提高,可减小视场内物体被漏检的概率,有助于探测视场中的更多细节。
下图中给出了一个直观的例子。(a)图由于采用了非重复扫描方式,随着时间的积累,视场覆盖率逐渐升高。而(b)图,由于扫描每次都是重复的,视场覆盖率几乎没有提升。
在gazebo的默认的lidar插件,属于传统激光雷达机械扫描方式,如法实现livox的非重复式扫描。
前面博客介绍了如何安装该雷达的仿真功能包
本篇博客在gazebo 中,对livox的几款雷达进行了仿真测试并更换了环境。
更换环境
将launch/livox_simulation.launch 文件中的第三行,的world文件换成自己的即可
<arg name="world" default="$(find rotors_gazebo)/worlds/basic.world" />
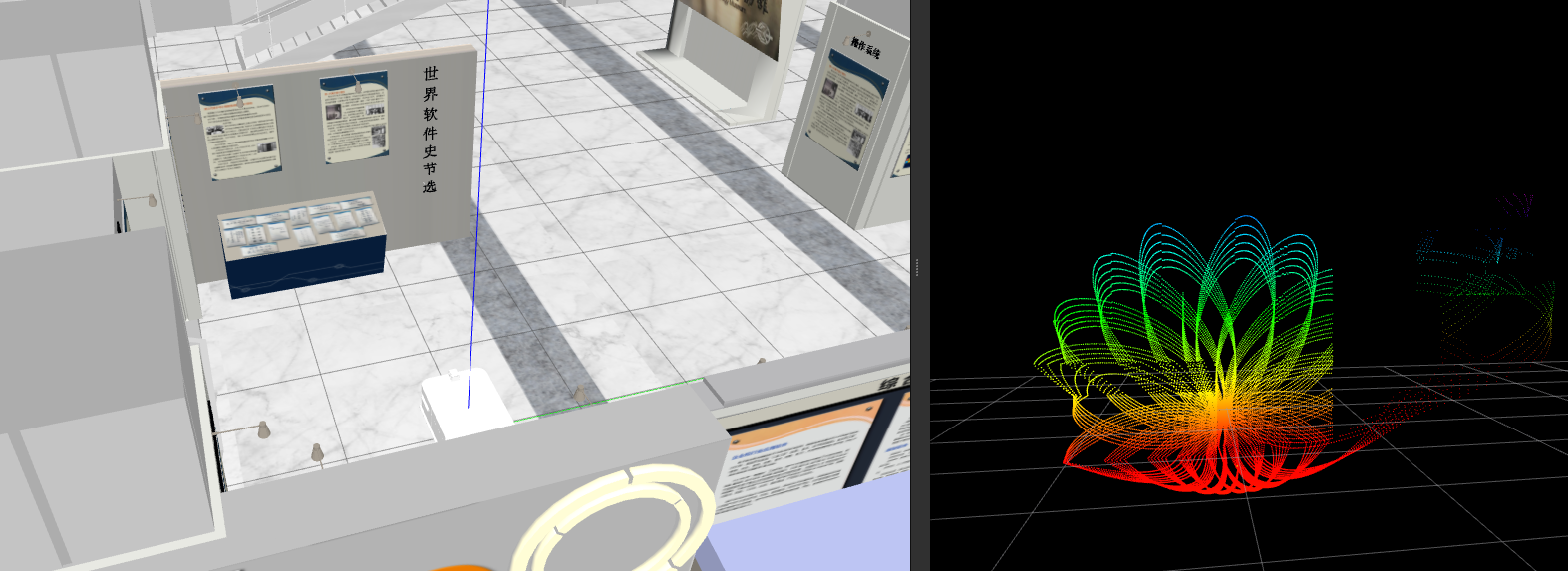
环境和对应的点云也会随之改变
更换livox激光雷达型号
默认的launch文件加载的是 livox avia 的型号
是这一款

价格 9999。 经过上述操作就可以在仿真软件中模拟万元的半固态激光雷达了
这款雷达的参数如下:
所以看 urdf/livox_avia.xacro 文件中的参数,基本与之是匹配的
<xacro:property name="laser_min_range" value="0.1"/>
<xacro:property name="laser_max_range" value="200.0"/>
<xacro:property name="horizontal_fov" value="70.4"/>
<xacro:property name="vertical_fov" value="77.2"/>
<xacro:property name="ros_topic" value="scan"/>
<xacro:property name="samples" value="24000"/>
<xacro:property name="downsample" value="1"/>
livox 还有一款雷达最近很火 ,mid 360 。
就是这一款
价格3999,但是官网一直没有货

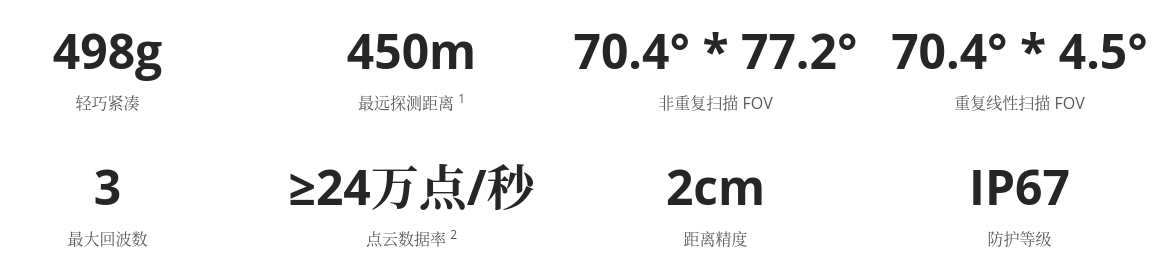
这款雷达的参数如下:
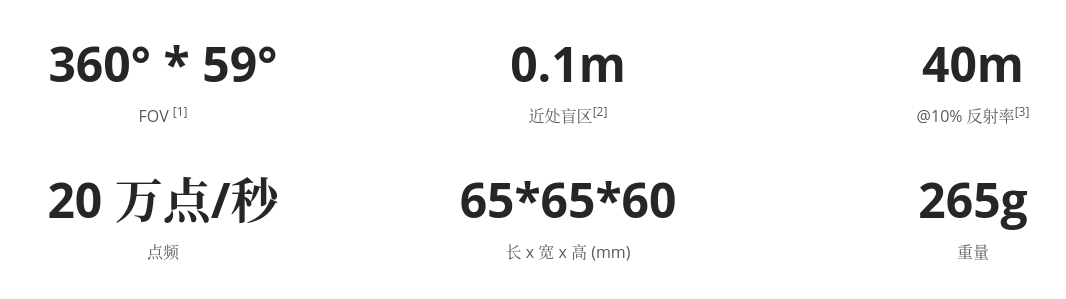
是一个360°的,垂直视场角接近60°,并且质量很轻,体积很小
文件 urdf/livox_mid360.xacro 中 的参数如下:
<xacro:property name="laser_min_range" value="0.1"/>
<xacro:property name="laser_max_range" value="200.0"/>
<xacro:property name="ros_topic" value="scan"/>
<xacro:property name="samples" value="24000"/>
<xacro:property name="downsample" value="1"/>
<horizontal>
<samples>100</samples>
<resolution>1</resolution>
<min_angle>${0}</min_angle>
<max_angle>${2*M_PI}</max_angle>
</horizontal>
<vertical>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>${-7.22/180*M_PI}</min_angle>
<max_angle>${55.22/180*M_PI}</max_angle>
</vertical>
水平一圈是100个点,垂直方向,视场是 -7.22 到55.22 ,360个点
和实际还是有点不一样的,可以自行安装实际修改
如果想更换仿真中的livox雷达型号,将launch/livox_simulation.launch文件中的 第7行
<arg name="livox_sensor" default="$(find livox_laser_simulation)/urdf/livox_avia.xacro" />
改为
<arg name="livox_sensor" default="$(find livox_laser_simulation)/urdf/livox_mid360.xacro" />
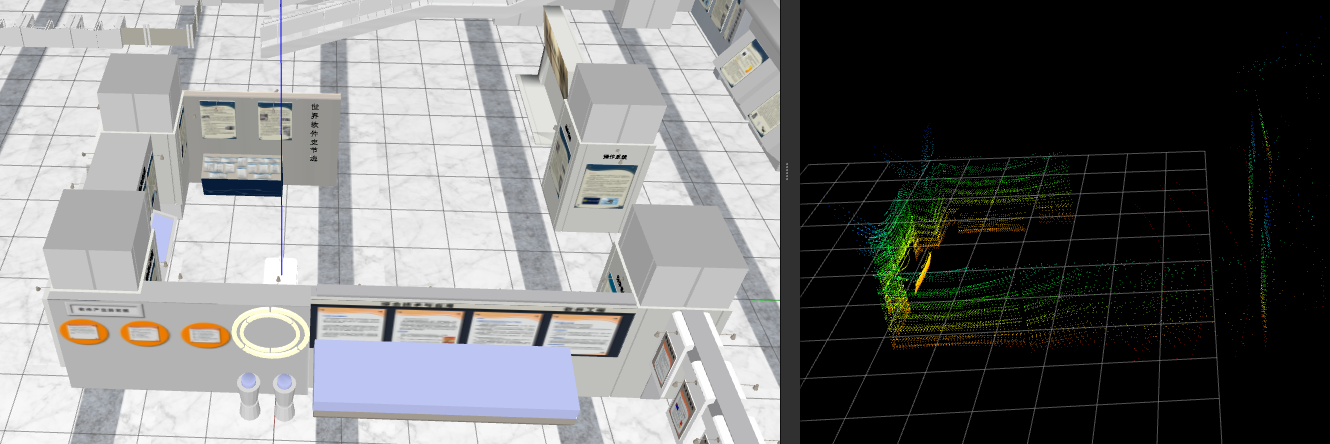
点云成了 mid360对应的形式。
但是机器人上的雷达外形没有改变,因为加载都是 livox_mid40.dae ,该仿真包里没有配备mid360对应的dae文件,所以外形不能改,不过这个问题对于仿真跑算法不影响。

除了以上测试的 avia 和 mid360外,还有其它型号如:
- HAP
- horizon
- mid40
- mid70
- tele