HWP功能规范
Highway Pilot Functional Specification
| 文件状态: 【√】草稿 【】正式发布 【】正在修改 |
| 文件起草分工 撰写: 审核: |
| 编制: | 签名: | 日期: |
| 审核: | 签名: | 日期: |
| 批准: | 签名: | 日期: |
| 版本 | 更改描述 | 更改日期 | 更改人 |
目录
1 概述... 5
1.1 目的... 5
1.2 范围... 5
1.3 术语及缩写... 5
1.4 设计与实验标准... 5
1.4.1 设计标准... 5
2 功能规范... 6
2.1 功能描述... 6
2.1.1 功能用途... 6
2.1.2 基本参数... 6
2.1.3 运行设计区域ODD.. 6
2.2 感知需求及方案... 6
2.2.1 感知需求... 6
2.2.2 传感器方案... 6
2.3 整车及执行器方案... 6
2.3.1 整车需求... 6
2.3.2 纵向控制执行器需求... 6
2.3.3 横向控制执行器需求... 6
2.4 接口描述... 7
2.4.1 输入信号... 7
2.4.2 输出信号... 7
2.5 人机交互方案描述... 7
2.5.1 按键方案描述... 7
2.5.2 仪表显示方案描述... 7
3 使用场景描述... 8
3.1 功能典型场景——基本场景... 8
3.2 功能典型场景——特殊场景... 8
3.3 功能不适用场景... 8
3.4 补充说明... 8
4 功能状态机及基本操作... 9
4.1 HWP功能状态机图... 9
4.2 HWP功能工作条件... 9
4.3 HWP功能工作状态... 9
4.4 HWP功能状态跳转及基本操作... 9
5 功能点描述... 10
5.1 巡航控制... 10
5.2 跟车控制... 10
5.3 Stop & Go. 10
5.4 多目标机制... 10
5.5 驾驶员超控... 10
5.6 弯道控制... 10
5.7 目标车异常消失处理机制... 10
6 互斥功能描述... 11
- 概述
- 目的
本文档的目的是描述高速公路巡航控制(Highway Pilot,HWP)功能的技术规范和设计说明
-
- 范围
本文档适用于L4-Highway项目中HWP功能的整个生命周期
-
- 术语及缩写
| 序号 | 术语或缩写 | 描述 |
| 1. | HWP | Highway Pilot |
-
- 设计与实验标准
- 设计标准
- 设计标准-非法规类
- 设计标准
- 设计与实验标准
TBD
| 序号 | 类别 | 名称 | 发布日期 |
| 1 | ISO | ISO 15622-2010:Intelligent transport systems — Cruise Control systems —Performance requirements and test procedures | 2010-04-15 |
| 2 | ISO | ISO 22179-2009:Intelligent transport systems — Full speed range adaptive cruise control (FSRA) systems — Performance requirements and test procedures | 2009-09-01 |
| 3 | GB | GB20608:智能运输系统---自适应巡航控制系统性能要求与监测方法 | 2006-11-07 |
| 4 | ISO | ISO 11270-2014:Intelligent transport systems — Lane keeping assistance systems (LKAS) —Performance requirements and test procedures | 2014-05-15 |
| 5 | GB | GB/T 40429-2021 汽车驾驶自动化分级 | 2021-08-20 |
| 6 | GB | GB5768:道路交通标志和标线——道路交通标线 | 2009-05-25 |
| 7 | JTG | JTG D20-2017 公路路线设计规范 | 2018-01-01 |
| 8 | ENCAP | Euro NCAP Test Protocol –Lane Support Systems v2.0.1 | 2017-11 |
-
-
-
- 设计标准-法规类
- 设计标准执行优先顺序
-
-
如无特殊说明,全球范围内通行的零件和车辆的标准和法规均适用于本功能 的设计限制,即使没有在本文件中明确指出,各国政府发布的要求均应在设计中 得到满足。对于某些特殊的国家要求,可以根据具体的采购订单或工程图纸得到 部分豁免。
TBD
- 功能设计目标及需求
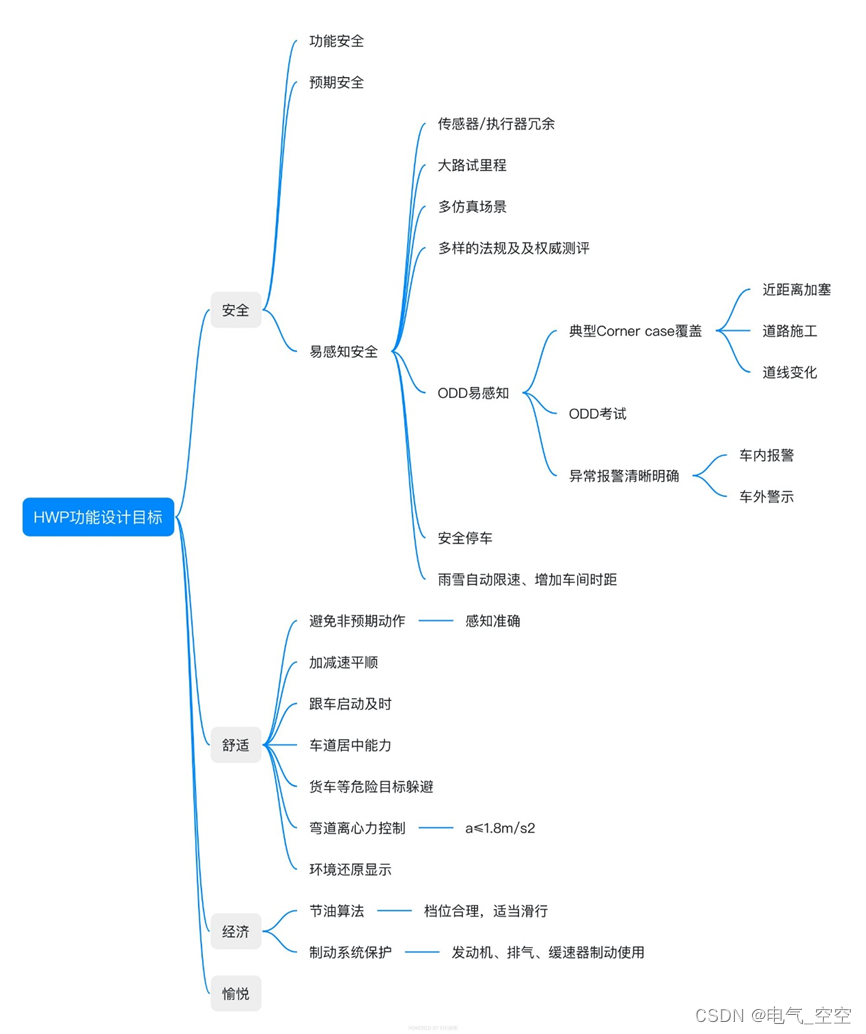
- 功能设计目标
-
- 功能需求
- 功能安全符合ISO 26262-2019:《Road Vehicles-Functional Safety》
- 预期功能安全符合 ISO21448-2019:《Road Vehicles-Safety of the intended functionality(SOTIF)》
- 传感器、控制器、执行器冗余设计,避免单点失效造成系统无法进入最小风险状态
- 路试里程大于xx KM
- 仿真覆盖XX法规,总测试case超过 xx 条
- 满足CNCAP、IVISTA、ENCAP等评测5星要求
- 系统能够应对近距离加塞,道路施工,导线变化等典型易失效场景
- 系统开启前,驾驶员应完成ODD考试
- 系统能够显示360度的环境信息
- 系统应具备安全停车功能
- 需要配置雨雪天气自动限速、自动增加车间时距的功能
- 系统感知准确,避免非预期的加减速,转向动作。在可接受时间内及时打断非预期动作。
- 加减速平顺,满足15622等法规需求
- 系统需要综合前车运动参数,车流信息,及时跟随前车启动,且避免反复急加减速。
- 车道居中偏差要求,±0.1m
- 系统需要能够主动避让侧向危险目标
- 车辆过弯时,向心加速度a≤1.8m/s2
- 系统需要匹配节油算法
- 系统需要合理分配制动行驶(发动机、排气、缓速器、轮边制动),减低制动系统损耗。
- 超出ODD场景,秒级接管
- 远程监控,远程控制功能
- 增强车车交互,让周边车辆更清晰的感知本车意图。
- 安全停车场景细化,考虑Blind safe stop
- 功能规范
- 功能描述
高速公路代驾(Highway Pilot,HWP)功能,通过车载传感器探测车辆周边环境,同时融合高精地图信息,在高速公路上完成单车道自动驾驶工作。在纵向上自动控制车辆加速与减速,在横向上自动将车辆保持在其行驶路径上。
-
-
- 主要功能点
-
- 自动限速巡航:系统可根据地图限速、道路限速标识信息,自动设定巡航车速。
- 自动跟车(包含Stop & Go):当车辆行驶路径上有低于巡航车速的前车时,自车可自动保持安全车距跟随前车行驶,支持自动跟停、跟走。
- 车道居中:系统可根据车道线图像,路缘,高精地图信息,自动保持本车道居中行驶。
- 智慧躲闪:系统识别到相邻车道有大型车辆(货车、卡车、客车等)且本车速度高于邻道车辆时,将控制本车略微远离大车行驶。超越大车后,本车将恢复至当前车道中央区域行驶。
- 智慧过弯:车辆可以根据弯道曲率自动调整过弯车速,从而实现安全,高效的过弯。
- 安全停车:当系统功能故障或检测到行驶在非设计运行区域时,系统会根据实际紧急程度,自动进行本车道停车或靠边停车操作,确保系统进入最小风险状态。
-
-
- 基本参数
-
| 项目 | 设定值 | 备注 |
| 工作车速范围 | 0-110km/h | 可根据具体车型调整 |
| 最大起效车速 | 100km/h | |
| 最大失效车速 | 110km/h | |
| 最大设定巡航车速 | 100km/h | |
| 最小转弯半径 | 100m | 匝道 |
| 跟车时距 | 1.5-5s |
-
-
- 运行设计区域ODD
-
详见《L4级干线物流ODD规范》
-
- 感知需求及方案
- 感知需求
- 感知需求及方案
详见《L4级干线物流感知需求》
-
-
- 传感器方案
-
详见《L4级干线物流传感器方案》
-
- 整车及执行器方案
- 整车需求
- 整车及执行器方案
完整功能规范私信。