上一篇我们说了创建地面站,那么这次我们在地面站添加一些特效。
1. 创建地面站
var locationPoint1 = new PointCartographic(m_earth, new Cartographic(Trig.DegreesToRadians(117.17066), Trig.DegreesToRadians(31.84056), 240.359));
m_facility = new Platform
{
Name = "DMZ",
LocationPoint = locationPoint1,
// Orient the facility using East-North-Up (ENU) axes.
OrientationAxes = new AxesEastNorthUp(m_earth, locationPoint1),
};
// Set the identifier for the facility in the CZML document.
m_facility.Extensions.Add(new IdentifierExtension("DSS"));
// Configure a glTF model for the facility.
m_facility.Extensions.Add(new ModelGraphicsExtension(new ModelGraphics
{
// Link to a binary glTF file.
Model = new CesiumResource(GetModelUri("facility.glb"), CesiumResourceBehavior.LinkTo),
RunAnimations = false,
HeightReference = CesiumHeightReference.ClampToGround,
}));
// Configure label for AGI HQ.
m_facility.Extensions.Add(new LabelGraphicsExtension(new LabelGraphics
{
Text = m_facility.Name,
FillColor = Color.White,
Font = new ConstantCesiumProperty<string>("20px"),
// Only show label when camera is far enough from the satellite,
// to avoid visually clashing with the model.
DistanceDisplayCondition = new Bounds(1000.0, double.MaxValue),
HeightReference = CesiumHeightReference.ClampToGround,
}));2.创建传感器
// Define the location of the facility using cartographic coordinates.
var locationPoint = new PointCartographic(m_earth, new Cartographic(Trig.DegreesToRadians(117.17066), Trig.DegreesToRadians(31.84056), 272.359));
m_sensorDome = new Platform
{
Name = "Sensor Dome",
LocationPoint = locationPoint,
OrientationAxes = new AxesEastNorthUp(m_earth, locationPoint),
};
// Set the identifier for the facility in the CZML document.
m_sensorDome.Extensions.Add(new IdentifierExtension("SensorDome"));
// Define the sensor geometry.
var dome = new ComplexConic();
dome.SetHalfAngles(0.0, Math.PI);
dome.SetClockAngles(0.0, Math.PI * 2);
dome.Radius = 10000.0;
m_sensorDome.Extensions.Add(new FieldOfViewExtension(dome));
// Configure graphical display of the sensor dome.
m_sensorDome.Extensions.Add(new FieldOfViewGraphicsExtension(new SensorFieldOfViewGraphics
{
//遮罩线颜色
DomeSurfaceMaterial = new GridMaterialGraphics
{
Color = Color.Transparent,
CellAlpha = 0.0,
},
EllipsoidHorizonSurfaceMaterial = new SolidColorMaterialGraphics
{
Color = Color.YellowGreen,
},
//贴地透明色
EllipsoidSurfaceMaterial = new SolidColorMaterialGraphics
{
Color = Color.Transparent,
},
EnvironmentIntersectionColor = new ConstantCesiumProperty<Color>(Color.Red),
EnvironmentOcclusionMaterial = new SolidColorMaterialGraphics
{
Color = Color.Green,
},
IntersectionColor = new ConstantCesiumProperty<Color>(Color.Transparent),//贴地轮廓
LateralSurfaceMaterial = new SolidColorMaterialGraphics
{
Color = Color.Red,
},
EnvironmentConstraint =true,
ViewshedOccludedColor = new ConstantCesiumProperty<Color>(Color.Red),
ViewshedVisibleColor = new ConstantCesiumProperty<Color>(Color.Red)
}));
// Define a rotating axes.
var rotatingAxes = new AxesLinearRate
{
ReferenceAxes = new AxesEastNorthUp(m_earth, locationPoint),
ReferenceEpoch = m_epoch,
InitialRotation = UnitQuaternion.Identity,
SpinAxis = UnitCartesian.UnitZ,
InitialRotationalVelocity = Trig.DegreesToRadians(5.0), // 5 degrees per second
RotationalAcceleration = 0.0,
};
// Define a rotation around X.
UnitQuaternion quaternion = new UnitQuaternion(new AngleAxisRotation(Math.PI / 3.0, UnitCartesian.UnitX));
// Define an angular offset for the rotating axes.
var rotatedOffsetAxes = new AxesFixedOffset(rotatingAxes, quaternion);
m_rotatingSensor = new Platform
{
Name = "Rotating Sensor",
LocationPoint = locationPoint,
OrientationAxes = rotatedOffsetAxes
};
// Set the identifier for the sensor in the CZML document.
m_rotatingSensor.Extensions.Add(new IdentifierExtension("RotatingSensor"));
// Define the sensor geometry.
m_rotatingSensor.Extensions.Add(new FieldOfViewExtension(new RectangularPyramid
{
XHalfAngle = Trig.DegreesToRadians(30),
YHalfAngle = Trig.DegreesToRadians(30),
Radius = 10000.0,
}));
// Configure graphical display of the sensor.
m_rotatingSensor.Extensions.Add(new FieldOfViewGraphicsExtension(new SensorFieldOfViewGraphics
{
DomeSurfaceMaterial = new GridMaterialGraphics
{
Color = Color.Green,
CellAlpha = 0.5,
},
LateralSurfaceMaterial = new GridMaterialGraphics
{
Color = Color.Pink,
CellAlpha = 0.5,
},
IntersectionColor = Color.White,
ShowIntersection = true,
ShowEllipsoidHorizonSurfaces = true,
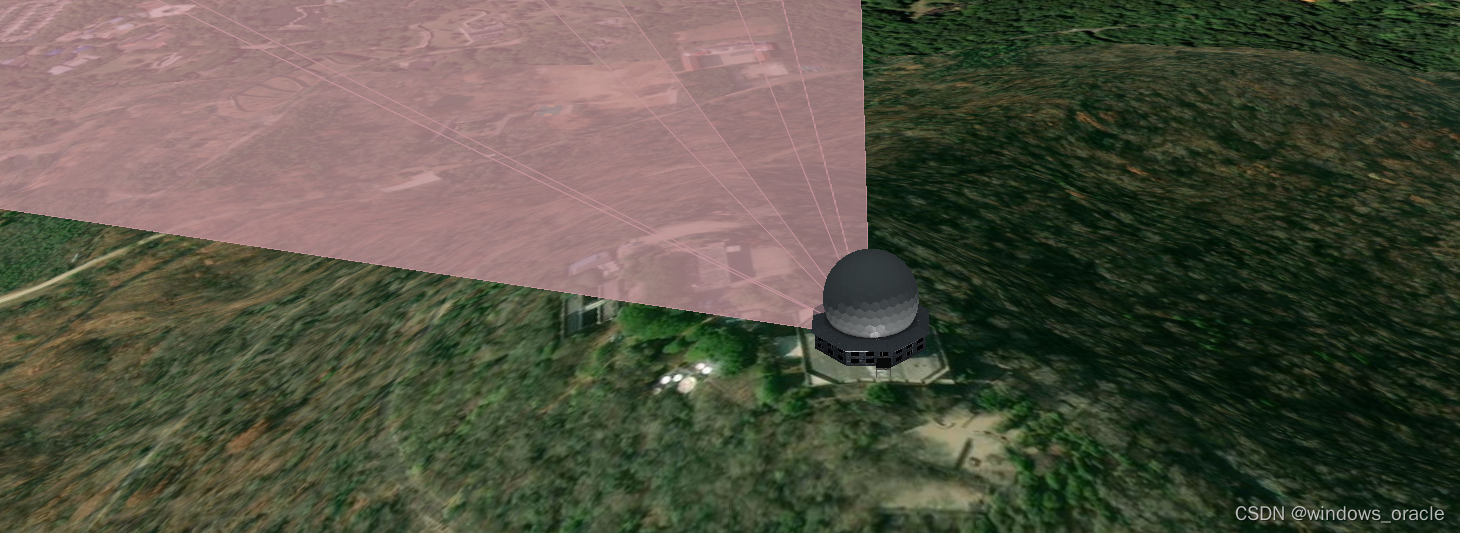
}));实现效果