内核I/O定时器(Kernel I/O Timer)是Windows内核中的一个对象,它允许内核或驱动程序设置一个定时器,以便在指定的时间间隔内调用一个回调函数。通常,内核I/O定时器用于周期性地执行某个任务,例如检查驱动程序的状态、收集性能数据等。
今天继续分享内核枚举系列知识,这次我们来学习如何通过代码的方式枚举内核IoTimer定时器,内核定时器其实就是在内核中实现的时钟,该定时器的枚举非常简单,因为在IoInitializeTimer初始化部分就可以找到IopTimerQueueHead地址,该变量内存储的就是定时器的链表头部。

内核I/O定时器通常由内核或驱动程序创建,使用KeInitializeTimerEx函数进行初始化。然后,使用KeSetTimerEx函数启动定时器,以指定间隔和回调函数。每次定时器超时时,回调函数都会被调用,然后定时器重新启动以等待下一个超时。
内核I/O定时器是内核中常见的机制之一,它允许内核和驱动程序实现各种功能,如性能监视、定时执行任务等。但是,使用内核I/O定时器必须小心谨慎,因为它们可能会影响系统的性能和稳定性,特别是当存在大量定时器时。
枚举Io定时器过程是这样的:
- 1.找到
IoInitializeTimer函数,该函数可以通过MmGetSystemRoutineAddress得到。 - 2.找到地址以后,我们向下增加
0xFF偏移量,并搜索特征定位到IopTimerQueueHead链表头。 - 3.将链表头转换为
IO_TIMER结构体,并循环链表头输出。
这里解释一下为什么要找IoInitializeTimer这个函数他是一个初始化函数,既然是初始化里面一定会涉及到链表的存储问题,找到他就能找到定时器链表基址,该函数的定义如下。
NTSTATUS
IoInitializeTimer(
IN PDEVICE_OBJECT DeviceObject, // 设备对象指针
IN PIO_TIMER_ROUTINE TimerRoutine, // 定时器例程
IN PVOID Context // 传给定时器例程的函数
);
接着我们需要得到IO定时器的结构定义,在DEVICE_OBJECT设备对象指针中存在一个Timer属性。
kd> dt _DEVICE_OBJECT
ntdll!_DEVICE_OBJECT
+0x000 Type : Int2B
+0x002 Size : Uint2B
+0x004 ReferenceCount : Int4B
+0x008 DriverObject : Ptr64 _DRIVER_OBJECT
+0x010 NextDevice : Ptr64 _DEVICE_OBJECT
+0x018 AttachedDevice : Ptr64 _DEVICE_OBJECT
+0x020 CurrentIrp : Ptr64 _IRP
+0x028 Timer : Ptr64 _IO_TIMER
+0x030 Flags : Uint4B
+0x034 Characteristics : Uint4B
+0x038 Vpb : Ptr64 _VPB
+0x040 DeviceExtension : Ptr64 Void
+0x048 DeviceType : Uint4B
+0x04c StackSize : Char
+0x050 Queue : <anonymous-tag>
+0x098 AlignmentRequirement : Uint4B
+0x0a0 DeviceQueue : _KDEVICE_QUEUE
+0x0c8 Dpc : _KDPC
+0x108 ActiveThreadCount : Uint4B
+0x110 SecurityDescriptor : Ptr64 Void
+0x118 DeviceLock : _KEVENT
+0x130 SectorSize : Uint2B
+0x132 Spare1 : Uint2B
+0x138 DeviceObjectExtension : Ptr64 _DEVOBJ_EXTENSION
+0x140 Reserved : Ptr64 Void

这里的这个+0x028 Timer定时器是一个结构体_IO_TIMER其就是IO定时器的所需结构体。
kd> dt _IO_TIMER
ntdll!_IO_TIMER
+0x000 Type : Int2B
+0x002 TimerFlag : Int2B
+0x008 TimerList : _LIST_ENTRY
+0x018 TimerRoutine : Ptr64 void
+0x020 Context : Ptr64 Void
+0x028 DeviceObject : Ptr64 _DEVICE_OBJECT

如上方的基础知识有了也就够了,接着就是实际开发部分,首先我们需要编写一个GetIoInitializeTimerAddress()函数,让该函数可以定位到IoInitializeTimer所在内核中的基地址上面,具体实现调用代码如下所示。
#include <ntifs.h>
// 得到IoInitializeTimer基址
PVOID GetIoInitializeTimerAddress()
{
PVOID VariableAddress = 0;
UNICODE_STRING uioiTime = { 0 };
RtlInitUnicodeString(&uioiTime, L"IoInitializeTimer");
VariableAddress = (PVOID)MmGetSystemRoutineAddress(&uioiTime);
if (VariableAddress != 0)
{
return VariableAddress;
}
return 0;
}
VOID UnDriver(PDRIVER_OBJECT driver)
{
DbgPrint(("Uninstall Driver Is OK \n"));
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
DbgPrint(("hello lyshark \n"));
// 得到基址
PUCHAR IoInitializeTimer = GetIoInitializeTimerAddress();
DbgPrint("IoInitializeTimer Address = %p \n", IoInitializeTimer);
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
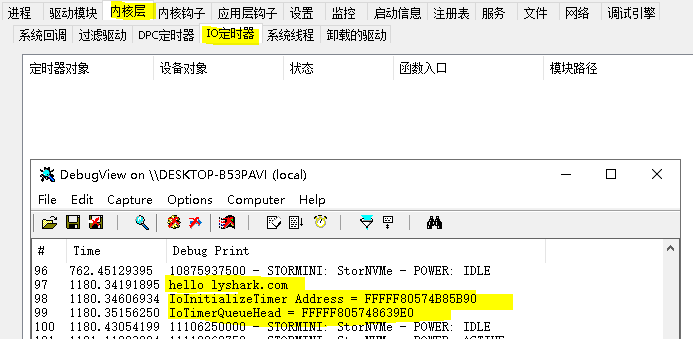
运行这个驱动程序,然后对比下是否一致:

接着我们在反汇编代码中寻找IoTimerQueueHead,此处在LyShark系统内这个偏移位置是nt!IoInitializeTimer+0x5d 具体输出位置如下。
kd> uf IoInitializeTimer
nt!IoInitializeTimer+0x5d:
fffff805`74b85bed 488d5008 lea rdx,[rax+8]
fffff805`74b85bf1 48897018 mov qword ptr [rax+18h],rsi
fffff805`74b85bf5 4c8d054475e0ff lea r8,[nt!IopTimerLock (fffff805`7498d140)]
fffff805`74b85bfc 48897820 mov qword ptr [rax+20h],rdi
fffff805`74b85c00 488d0dd9ddcdff lea rcx,[nt!IopTimerQueueHead (fffff805`748639e0)]
fffff805`74b85c07 e8141e98ff call nt!ExInterlockedInsertTailList (fffff805`74507a20)
fffff805`74b85c0c 33c0 xor eax,eax
在WinDBG中标注出颜色lea rcx,[nt!IopTimerQueueHead (fffff805748639e0)]更容易看到。

接着就是通过代码实现对此处的定位,定位我们就采用特征码搜索的方式,如下代码是特征搜索部分。
- StartSearchAddress 代表开始位置
- EndSearchAddress 代表结束位置,粗略计算0xff就可以定位到了。
#include <ntifs.h>
// 得到IoInitializeTimer基址
PVOID GetIoInitializeTimerAddress()
{
PVOID VariableAddress = 0;
UNICODE_STRING uioiTime = { 0 };
RtlInitUnicodeString(&uioiTime, L"IoInitializeTimer");
VariableAddress = (PVOID)MmGetSystemRoutineAddress(&uioiTime);
if (VariableAddress != 0)
{
return VariableAddress;
}
return 0;
}
VOID UnDriver(PDRIVER_OBJECT driver)
{
DbgPrint(("Uninstall Driver Is OK \n"));
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
DbgPrint(("hello lyshark \n"));
// 得到基址
PUCHAR IoInitializeTimer = GetIoInitializeTimerAddress();
DbgPrint("IoInitializeTimer Address = %p \n", IoInitializeTimer);
INT32 iOffset = 0;
PLIST_ENTRY IoTimerQueueHead = NULL;
PUCHAR StartSearchAddress = IoInitializeTimer;
PUCHAR EndSearchAddress = IoInitializeTimer + 0xFF;
UCHAR v1 = 0, v2 = 0, v3 = 0;
for (PUCHAR i = StartSearchAddress; i < EndSearchAddress; i++)
{
if (MmIsAddressValid(i) && MmIsAddressValid(i + 1) && MmIsAddressValid(i + 2))
{
v1 = *i;
v2 = *(i + 1);
v3 = *(i + 2);
// 三个特征码
if (v1 == 0x48 && v2 == 0x8d && v3 == 0x0d)
{
memcpy(&iOffset, i + 3, 4);
IoTimerQueueHead = (PLIST_ENTRY)(iOffset + (ULONG64)i + 7);
DbgPrint("IoTimerQueueHead = %p \n", IoTimerQueueHead);
break;
}
}
}
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
搜索三个特征码v1 == 0x48 && v2 == 0x8d && v3 == 0x0d从而得到内存位置,运行驱动对比下。
- 运行代码会取出
lea指令后面的操作数,而不是取出lea指令的内存地址。

最后一步就是枚举部分,我们需要前面提到的IO_TIMER结构体定义。
- PIO_TIMER Timer = CONTAINING_RECORD(NextEntry, IO_TIMER, TimerList) 得到结构体,循环输出即可。
#include <ntddk.h>
#include <ntstrsafe.h>
typedef struct _IO_TIMER
{
INT16 Type;
INT16 TimerFlag;
LONG32 Unknown;
LIST_ENTRY TimerList;
PVOID TimerRoutine;
PVOID Context;
PVOID DeviceObject;
}IO_TIMER, *PIO_TIMER;
// 得到IoInitializeTimer基址
PVOID GetIoInitializeTimerAddress()
{
PVOID VariableAddress = 0;
UNICODE_STRING uioiTime = { 0 };
RtlInitUnicodeString(&uioiTime, L"IoInitializeTimer");
VariableAddress = (PVOID)MmGetSystemRoutineAddress(&uioiTime);
if (VariableAddress != 0)
{
return VariableAddress;
}
return 0;
}
VOID UnDriver(PDRIVER_OBJECT driver)
{
DbgPrint("卸载完成... \n");
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
DbgPrint(("hello lyshark \n"));
// 得到基址
PUCHAR IoInitializeTimer = GetIoInitializeTimerAddress();
DbgPrint("IoInitializeTimer Address = %p \n", IoInitializeTimer);
// 搜索IoTimerQueueHead地址
/*
nt!IoInitializeTimer+0x5d:
fffff806`349963cd 488d5008 lea rdx,[rax+8]
fffff806`349963d1 48897018 mov qword ptr [rax+18h],rsi
fffff806`349963d5 4c8d05648de0ff lea r8,[nt!IopTimerLock (fffff806`3479f140)]
fffff806`349963dc 48897820 mov qword ptr [rax+20h],rdi
fffff806`349963e0 488d0d99f6cdff lea rcx,[nt!IopTimerQueueHead (fffff806`34675a80)]
fffff806`349963e7 e8c43598ff call nt!ExInterlockedInsertTailList (fffff806`343199b0)
fffff806`349963ec 33c0 xor eax,eax
*/
INT32 iOffset = 0;
PLIST_ENTRY IoTimerQueueHead = NULL;
PUCHAR StartSearchAddress = IoInitializeTimer;
PUCHAR EndSearchAddress = IoInitializeTimer + 0xFF;
UCHAR v1 = 0, v2 = 0, v3 = 0;
for (PUCHAR i = StartSearchAddress; i < EndSearchAddress; i++)
{
if (MmIsAddressValid(i) && MmIsAddressValid(i + 1) && MmIsAddressValid(i + 2))
{
v1 = *i;
v2 = *(i + 1);
v3 = *(i + 2);
// fffff806`349963e0 48 8d 0d 99 f6 cd ff lea rcx,[nt!IopTimerQueueHead (fffff806`34675a80)]
if (v1 == 0x48 && v2 == 0x8d && v3 == 0x0d)
{
memcpy(&iOffset, i + 3, 4);
IoTimerQueueHead = (PLIST_ENTRY)(iOffset + (ULONG64)i + 7);
DbgPrint("IoTimerQueueHead = %p \n", IoTimerQueueHead);
break;
}
}
}
// 枚举列表
KIRQL OldIrql;
// 获得特权级
OldIrql = KeRaiseIrqlToDpcLevel();
if (IoTimerQueueHead && MmIsAddressValid((PVOID)IoTimerQueueHead))
{
PLIST_ENTRY NextEntry = IoTimerQueueHead->Flink;
while (MmIsAddressValid(NextEntry) && NextEntry != (PLIST_ENTRY)IoTimerQueueHead)
{
PIO_TIMER Timer = CONTAINING_RECORD(NextEntry, IO_TIMER, TimerList);
if (Timer && MmIsAddressValid(Timer))
{
DbgPrint("IO对象地址: %p \n", Timer);
}
NextEntry = NextEntry->Flink;
}
}
// 恢复特权级
KeLowerIrql(OldIrql);
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
运行这段源代码,并可得到以下输出,由于没有IO定时器所以输出结果是空的:
至此IO定时器的枚举就介绍完了,在教程中你已经学会了使用特征码定位这门技术,相信你完全可以输出内核中想要得到的任何结构体。