1.青蛙的约会
Description
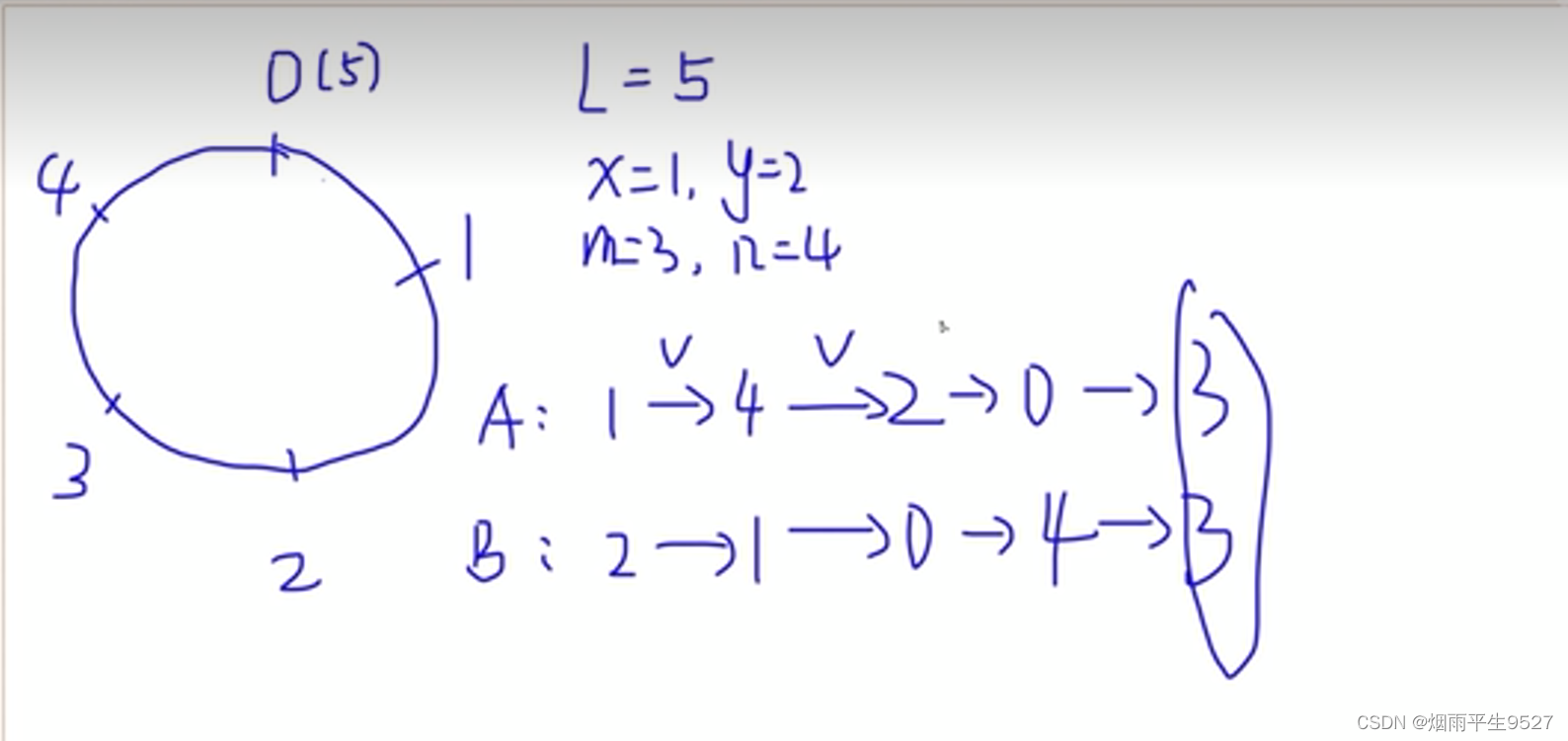
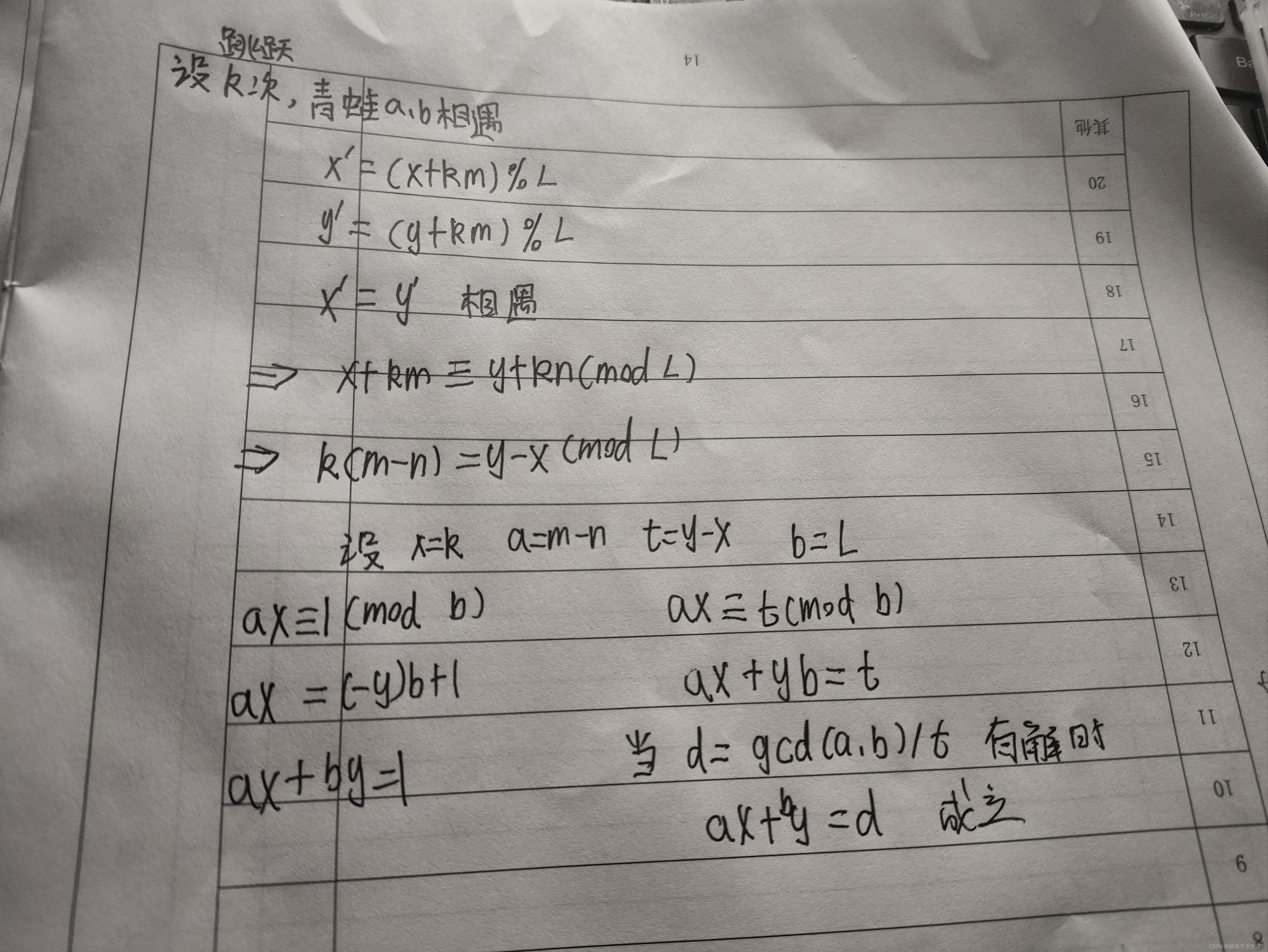
两只青蛙在网上相识了,它们聊得很开心,于是觉得很有必要见一面。它们很高兴地发现它们住在同一条纬度线上,于是它们约定各自朝西跳,直到碰面为止。可是它们出发之前忘记了一件很重要的事情,既没有问清楚对方的特征,也没有约定见面的具体位置。不过青蛙们都是很乐观的,它们觉得只要一直朝着某个方向跳下去,总能碰到对方的。但是除非这两只青蛙在同一时间跳到同一点上,不然是永远都不可能碰面的。为了帮助这两只乐观的青蛙,你被要求写一个程序来判断这两只青蛙是否能够碰面,会在什么时候碰面。 我们把这两只青蛙分别叫做青蛙A和青蛙B,并且规定纬度线上东经0度处为原点,由东往西为正方向,单位长度1米,这样我们就得到了一条首尾相接的数轴。设青蛙A的出发点坐标是x,青蛙B的出发点坐标是y。青蛙A一次能跳m米,青蛙B一次能跳n米,两只青蛙跳一次所花费的时间相同。纬度线总长L米。现在要你求出它们跳了几次以后才会碰面。Input
输入只包括一行5个整数x,y,m,n,L,其中x≠y < 2000000000,0 < m、n < 2000000000,0 < L < 2100000000。Output
输出碰面所需要的跳跃次数,如果永远不可能碰面则输出一行"Impossible"Sample Input
1 2 3 4 5Sample Output
4
测试数据模拟
#include <iostream>
using namespace std;
#define LL long long
/*
x:青蛙a的起点
y:青蛙b的起点
m:青蛙a一次能跳多远
n:青蛙b一次能跳多远
L:一圈的距离
*/
LL x, y, m, n, l;
LL exgcd(LL a,LL b,LL &x,LL &y){//扩展欧几里得算法
if(b==0){
x=1,y=0;
return a;
}
LL d=exgcd(b,a%b,y,x);
y-=a/b*x;
return d;
}
int main()
{
while(cin >> x >> y >> m >> n >> l){
LL t = ((y - x) % l + l) % l; // 计算 t 的值,保证 t 为正数
LL a = ((m - n) % l + l) % l; // 计算 a 的值,保证 a 为正数
LL b = l;
LL d = exgcd(a, b, x, y); // 调用 exgcd 函数,求解 a 和 b 的最大公约数,同时更新 x 和 y 的值
if(t % d) cout << "Impossible" << endl; // 如果 t 不能整除 d,即永远也碰不到,输出 "Impossible"
else{
x = ((x * t / d) % (b / d) + b / d) % (b / d);
/*
计算青蛙a在t时间内从起点x跳到终点y所需的最小步数
% (b / d):取模运算,用于确保跳跃距离不超过一圈的距离b。因为每圈的距离为b,所
以需要将跳跃距离限制在b以内。
+ b / d:加上一圈的距离的一半,以确保跳跃距离始终在起点和终点之间。
% (b / d):再次取模运算,确保最终的跳跃距离仍然在一圈的距离b以内。
*/
cout << x << endl;
}
}
return 0;
}
2.五指山
Description
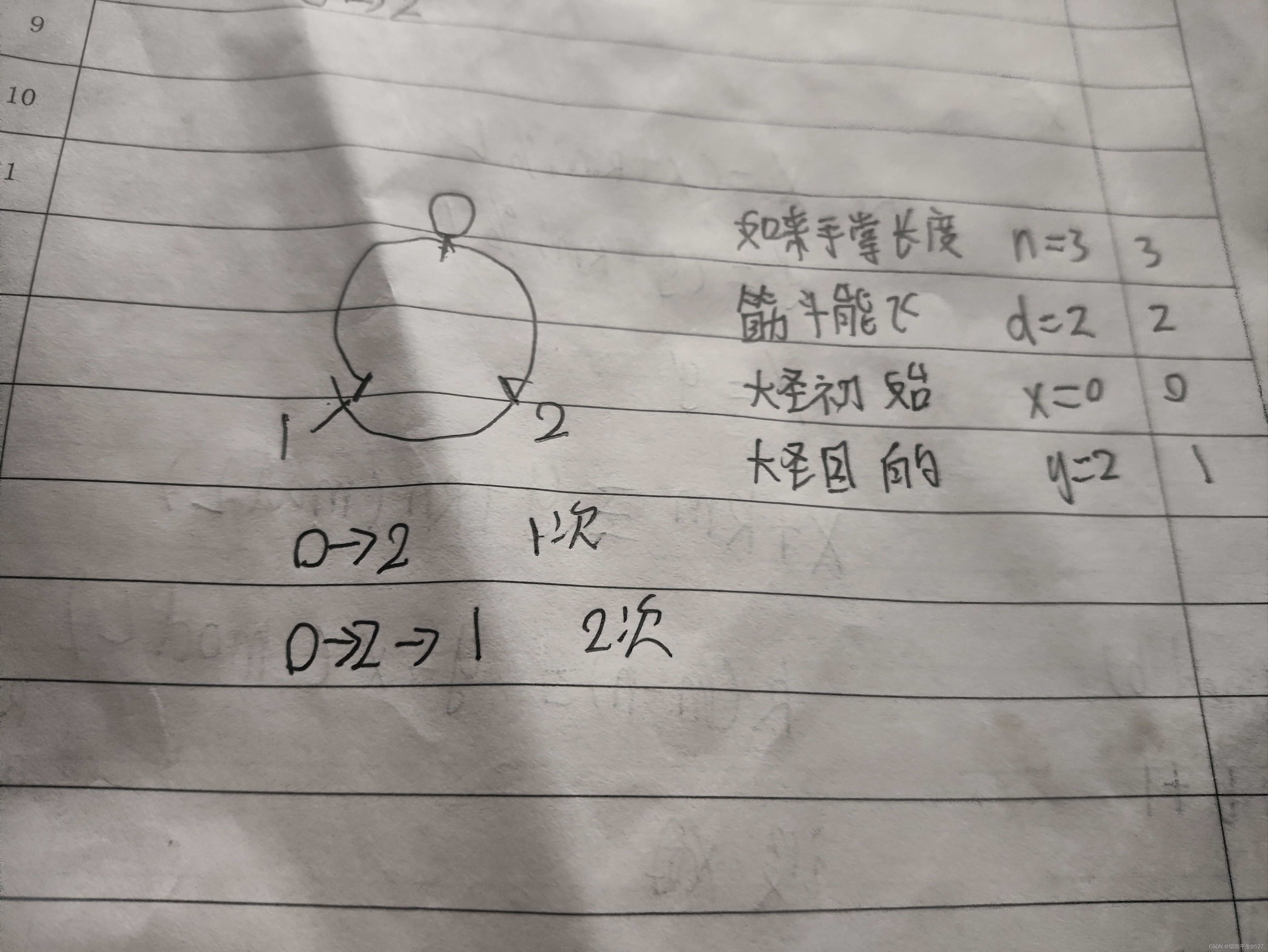
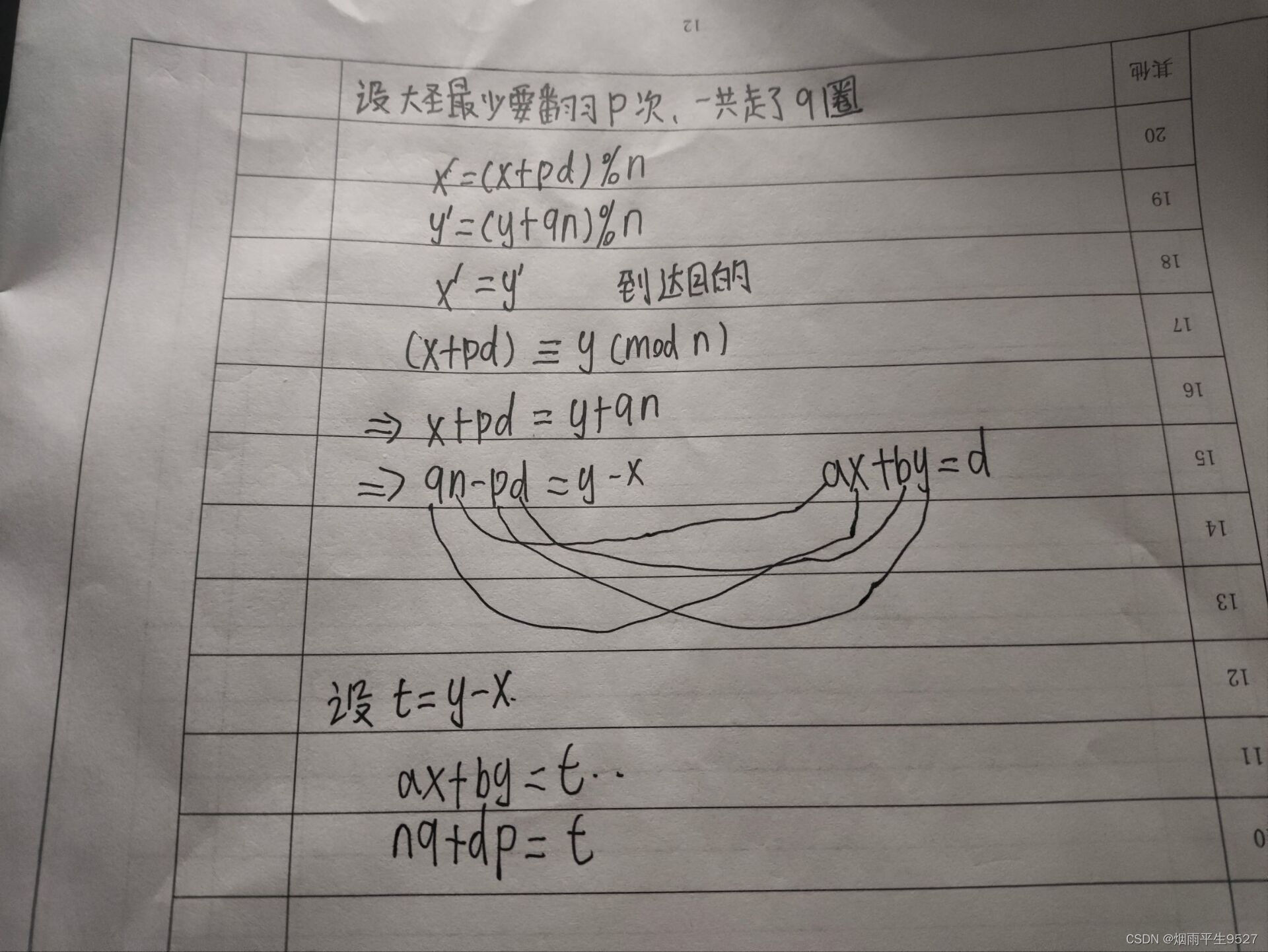
西游记中孙吾空大闹天宫,如来佛祖前来降伏他,说道:“我与你打个赌赛;你若有本事,一筋斗打出我这右手掌中,算你赢,再不用动刀兵苦争战,就请玉帝到西方居住,把天宫让你;若不能打出手掌,你还下界为妖,再修几劫,却来争吵。” 那大圣闻言,暗笑道:“这如来十分好呆!我老孙一筋斗去十万八千里。他那手掌,方圆不满一尺,如何跳不出去?”急发声道:“既如此说,你可做得主张?”佛祖道:“做得!做得!”伸开右手,却似个荷叶大小。那大圣收了如意棒,抖擞神威,将身一纵,站在佛祖手心里,却道声:“我出去也!”你看他一路云光,无影无形去了。大圣行时,忽见有五根肉红柱子,撑着一股青气。他道:“此间乃尽头路了。这番回去,如来作证,灵霄殿定是我坐也。”翻转筋斗云,径回本处,站在如来掌:“我已去,今来了。你教玉帝让天宫与我。” 如来骂道:“你正好不曾离了我掌哩!”大圣道:“你是不知。我去到天尽头,见五根肉红柱,撑着一股青气,我留个记在那里,你敢和我同去看么?”如来道:“不消去,你只自低头看看。”那大圣睁圆火眼金睛,低头看时,原来佛祖右手中指写着“齐天大圣,到此一游。”大圣大吃了一惊道:“有这等事!有这等事!我将此字写在撑天柱子上,如何却在他手指上?莫非有个未卜先知的法术?我决不信!不信!等我再去来!” 好大圣,急纵身又要跳出,被佛祖翻掌一扑,把这猴王推出西天门外,将五指化作金、木、水、火、土五座联山,唤名“五行山”,轻轻的把他压住。 我们假设佛祖的手掌是一个圆圈(所以任凭大圣一个筋斗云十万八千里也是飞不出其手掌心),圆圈的长为n,逆时针记为:0,1,2,…,n-1,而大圣每次飞的距离为d.现在大圣所在的位置记为x,而大圣想去的地方在y。现在要你告诉大圣至少要多少筋斗云才能到达目的地。Input
有多组测试数据。 第一行是一个正整数T,表示测试数据的组数。 每组测试数据包括一行,四个非负整数,n(2 < n < 10^9),表示如来手掌圆圈的长度;d(0 < d < n),筋斗所能飞的距离;x(0 <= x < n),大圣的初始位置;y(0 <= y < n),大圣想去的地方。 注意孙悟空的筋斗云只沿着逆时针方向翻。Output
对于每组测试数据,输出一行,给出大圣最少要翻多少个筋斗云才能到达目的地。如果无论翻多少个筋斗云也不能到达,输出“Impossible”.Sample Input
2 3 2 0 2 3 2 0 1Sample Output
1 2
测试数据模拟
#include<iostream>
#include<algorithm>
#include<cstdio>
using namespace std;
typedef long long LL;
/*
x:大圣的初始位置
y:大圣的目的地·
n:如来手掌圆圈的长度
d:筋斗所能飞的距离
*/
LL n,d,x,y,q,p;
LL exgcd(LL a,LL b,LL &x,LL &y){//扩展欧几里得算法
if(b==0){
x=1,y=0;
return a;
}
LL d=exgcd(b,a%b,y,x);
y-=a/b*x;
return d;
}
int main(){
int T;
scanf("%d",&T);
while(T--){
cin>>n>>d>>x>>y;
LL t = ((y-x)%n+n)%n;// 计算 t 的值,保证 t 为正数
int gcd = exgcd(n,d,q,p);
if((t)%gcd){
cout << "Impossible" << endl;
}else{
p*=t/gcd;
n/=gcd;
cout<<(p%n+n)%n<<endl;
//计算大圣从初始位置到目的地的最短距离
}
}
return 0;
}
3.Fight 2018
Description
由于今年是2018年,所以BD对2018这个数字深有研究,最近又开始研究2018的因子,她想知道2018的因子和是多少,可是她觉得这个问题太简单了,没有什么挑战性,她想让你求2018^n 的因子和是多少,可是由于结果太大了,所以要求对499取模。Input
输入数据包含多个测试实例,每个测试实例的输入只包含一个正整数n(1<=n<=1e20)。输入0的时候结束。Output
对应于每一个输入,请输出对应的答案。Sample Input
1 0Sample Output
36
#include <iostream>
using namespace std;
const int MOD = 499;
long long pow_q(int a, __int128 b, int mod) {
long long m = 1;
while (b > 0) {
if (b % 2 == 1) {
m = (m * a) % mod;
}
a = (a * a) % mod;
b /= 2;
}
return m;
}inline __int128 read(){
__int128 x = 0, f = 1;
char ch = getchar();
while(ch < '0' || ch > '9'){
if(ch == '-')
f = -1;
ch = getchar();
}
while(ch >= '0' && ch <= '9'){
x = x * 10 + ch - '0';
ch = getchar();
}
return x * f;
}
inline void print(__int128 x){
if(x < 0){
putchar('-');
x = -x;
}
if(x > 9)
print(x / 10);
putchar(x % 10 + '0');
}int main()
{
__int128 n;
while(n = read())
{
if(n == 0) return 0;
//print(n);
long long sum = (pow_q(2, n + 1, MOD) - 1) * pow_q(2 - 1, MOD - 2, MOD) % MOD;
sum = (sum * (pow_q(1009, n + 1, MOD) - 1) * pow_q(1009 - 1, MOD - 2, MOD)) % MOD;
cout << sum << endl;
}
return 0;
}

![[leetCode]257. 二叉树的所有路径(两种方法)](https://img-blog.csdnimg.cn/81c2433379454c7fb569ac4dc40b9872.png)