点云的配准是将不同的3D点云对齐成一个完成的点云模型;配准的目标是找到两帧点云之间的相对旋转(rotation)与平移(translation),使得两份点云中有重叠的区域能够完好拼接。
点云配准示例图(来自PCL)

上图为初始的5份点云数据,需要将着几份点云数据拼接成如下图中完整的模型
点云动态配准示例
常见的点云配准方式主要包含ICP配准以及NDT配准以及他们的配准,当然还包括神经网络的点云配准方式。
1、点云配准理论
点云配准需要找到两份点云数据之间点的对应估计,也就是找到两份点云中重叠的部分才可以进行配准,这类配准,对于有确定对应点的配准拥有闭式解(closed form solution)不需要迭代求解即可获取最优值。
对应点的寻找方式:
1 若为深度相机,则可以借助图像信息来寻找对应的匹配点并投影回3d空间
2 若为两帧点云信息,则可以借助点云特征点来进行确立
不过上诉方法都会出现误匹配,一般会借助RANSAC(随机采样一致性)来得到更为robust的估计。
1 ICP主要为point2point ICP和point2plane两种ICP方式
ICP配准点云时需要有较为准确的初始位姿后再使用该方法进行精配准;ICP的点云配准大体步骤分为如下几步:
1 点的匹配(可以从图像中来或者点云中来)
1.1 在两帧点云中找到对应的关键点,点云中的关键点一般为特定的几何结构,比如书本的边角,与图像类似;点云中的关键点包括NARF;SIFT;FAST;当然也可以不适用关键点;使用每一个点或者点云中的一部分点来进行配准;不过那样的话会导致计算量过大。
1.2 特征的描述子;与图像类似,再找到点云的关键点后,需要提取该关键点的描述子信息;通过组合该结构的信息来生成对应的向量用于比对;点云的中描述子包括NARF;FPFH;BRIEF;SIFT等。
2 匹配点估计;给定两帧点云的特征向量集合;通过关键点与描述子来找到重叠区域中相互对应的关键点:对于关键点或特征的匹配,可以使用暴力搜索;kd-tree(FLANN)等方式来进行匹配
3 匹配点对估计;类似与图像中关键点匹配;点云中的关键点匹配也存在许多误匹配;误匹配会影响最终的配准结果;因此此处可以使用ransac或者根据匹配点对的百分位进行截取等方式来进行优化;如果一帧中的某个关键点与另一帧中的多个关键点匹配;则会取最小距离来确定匹配点
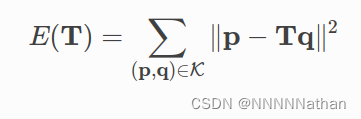
4 变换矩阵计算;再得到准确的相互匹配的点云后;则可以计算变换矩阵;
其中point2point的评估误差为
point2plane的评估误差为(其中np为点P的法线信息)
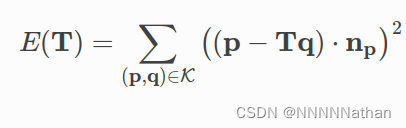
估计两个点集的R和t可以使用使用SVD或者非线性优化求解;
1 SVD方法
给定两对匹配点的点集和
,对其中第i对匹配点的误差项为:
因此可以对所有点构建最小二乘问题,求得使误差平方和达到极小的R和t:
分别定义两组点的质心为(此处使用不带下标的项来代表质心):
在误差函数中进行展开
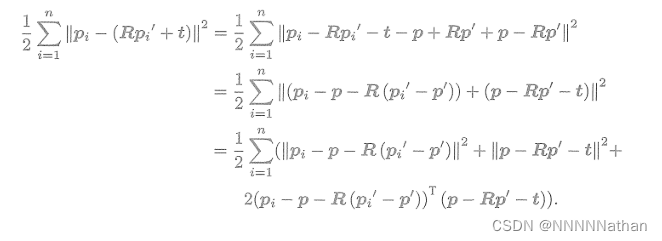
展开后最后一项元素求和为0(所有元素相加减去n个
的质心
为0),因此优化的结果仅与前两项相关,即
上式中,只有左边和旋转矩阵R相关,右侧同时R与t。因此只要求得R后令右式为0即可求出t。
ICP的SVD方法流程如下
1、计算两组匹配点的质心与
, 然后将每个点减去质心得到去质心的坐标:
2、根据上述阐述的优化,计算旋转矩阵:
3、根据计算得到的旋转矩阵计算平移向量t
因此,按照上面的步骤,要先求取两组点集之间的旋转矩阵,所以下面说重点一下R的计算:
其中第一项与R无关;第二项
中因为R为正交矩阵因此
,也与R无关;只有最后一项的
与R有关,因此有如下推导:
注: 其中为trace(迹),有
然后可以使用SVD分解得出最优的旋转矩阵R。
可知W是一个n*n的矩阵,n为点集的维度,若是点云数据则n=3则W是3*3的矩阵,
若此时W是可逆矩阵,则可以直接通过公式获得最优的旋转矩阵
但考虑到所有情况,直接对W进行SVD分解也是可以的:
其中为奇异值组成的对角矩阵,对角线元素从大到小排列,UV则为正交矩阵;当W满秩时,R为
若R的行列式为负数,则去-R为最优数值。
对这块刚兴趣的同学可以参考Kabsch算法的实现
https://en.wikipedia.org/wiki/Kabsch_algorithm![]() https://en.wikipedia.org/wiki/Kabsch_algorithm
https://en.wikipedia.org/wiki/Kabsch_algorithm
2 非线性优化
2 open3d中使用ICP
更新中