【附代码】判断线段是否相交算法(Python,C++)
文章目录
- 【附代码】判断线段是否相交算法(Python,C++)
- 相关文献
- 测试电脑配置
- 基础
- 向量旋转
- 向量缩放
- 向量投影
- 推导
- 点乘
- 定义
- 推导
- 几何意义
- 叉乘
- 定义
- 推导
- 几何意义
- 判断线段是否相交
- 代码
- C++
- Python
- 画图代码
- 测试结果
作者:小猪快跑
基础数学&计算数学,从事优化领域5年+,主要研究方向:MIP求解器、整数规划、随机规划、智能优化算法
如有错误,欢迎指正。如有更好的算法,也欢迎交流!!!——@小猪快跑
相关文献
测试电脑配置
博主三千元电脑的渣渣配置:
CPU model: AMD Ryzen 7 7840HS w/ Radeon 780M Graphics, instruction set [SSE2|AVX|AVX2|AVX512]
Thread count: 8 physical cores, 16 logical processors, using up to 16 threads
基础
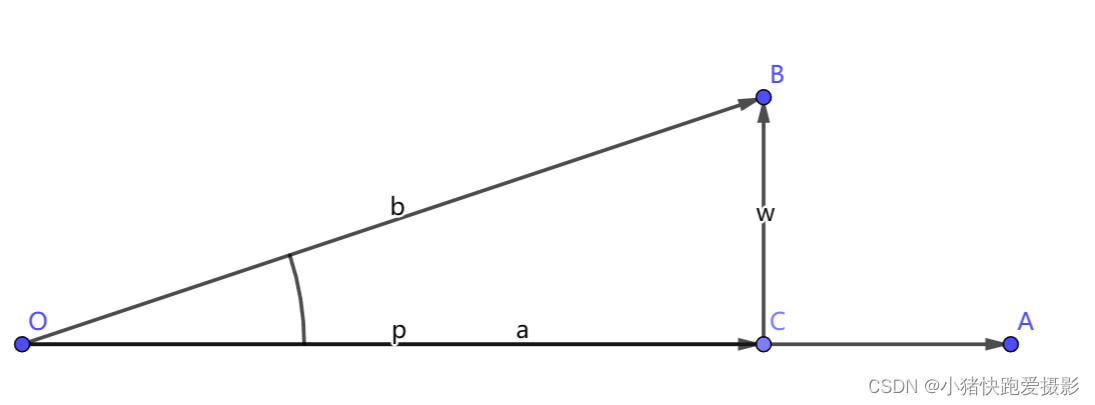
这里假设:
O
A
→
=
a
⃗
=
(
x
a
,
y
a
)
O
B
→
=
b
⃗
=
(
x
b
,
y
b
)
O
C
→
=
p
⃗
=
(
x
c
,
y
c
)
C
B
→
=
w
⃗
∠
A
O
B
=
α
\overrightarrow{OA} = \vec{a} = (x_a,y_a) \\ \overrightarrow{OB} = \vec{b} = (x_b,y_b) \\ \overrightarrow{OC} = \vec{p} = (x_c,y_c) \\ \overrightarrow{CB} = \vec{w} \\ ∠AOB = \alpha
OA=a=(xa,ya)OB=b=(xb,yb)OC=p=(xc,yc)CB=w∠AOB=α
向量旋转
任意向量都能表示成:
(
r
cos
α
r
sin
α
)
\left ( \begin{matrix} r\cos{\alpha} \\ r\sin{\alpha} \\ \end{matrix} \right )
(rcosαrsinα)
假设向量逆时针旋转了
β
\beta
β,那么我们容易知道旋转后向量是:
(
r
cos
(
α
+
β
)
r
sin
(
α
+
β
)
)
\left ( \begin{matrix} r\cos({\alpha + \beta}) \\ r\sin({\alpha + \beta}) \\ \end{matrix} \right )
(rcos(α+β)rsin(α+β))
那么容易得到:
(
r
cos
(
α
+
β
)
r
sin
(
α
+
β
)
)
=
(
cos
α
−
sin
α
sin
α
cos
α
)
(
r
cos
α
r
sin
α
)
\left ( \begin{matrix} r\cos({\alpha + \beta}) \\ r\sin({\alpha + \beta}) \\ \end{matrix} \right )= \left ( \begin{array}{rr} \cos{\alpha} & -\sin{\alpha} \\ \sin{\alpha} & \cos{\alpha} \\ \end{array} \right ) \left ( \begin{matrix} r\cos{\alpha} \\ r\sin{\alpha} \\ \end{matrix} \right )
(rcos(α+β)rsin(α+β))=(cosαsinα−sinαcosα)(rcosαrsinα)
于是旋转向量就是:
(
cos
α
−
sin
α
sin
α
cos
α
)
\left ( \begin{array}{rr} \cos{\alpha} & -\sin{\alpha} \\ \sin{\alpha} & \cos{\alpha} \\ \end{array} \right )
(cosαsinα−sinαcosα)
向量缩放
( r 0 0 r ) \left ( \begin{array}{rr} r & 0 \\ 0 & r \\ \end{array} \right ) (r00r)
向量投影
推导
主要利用
O
C
→
\overrightarrow{OC}
OC 和
C
B
→
\overrightarrow{CB}
CB 垂直,点积为0:
w
⃗
=
b
⃗
−
p
⃗
w
⃗
⋅
p
⃗
=
0
}
⇒
(
b
⃗
−
p
⃗
)
⋅
p
⃗
=
0
p
⃗
=
k
a
⃗
}
⇒
(
b
⃗
−
k
a
⃗
)
⋅
k
a
⃗
=
0
p
⃗
=
k
a
⃗
}
⇒
p
⃗
=
a
⃗
⋅
b
⃗
a
⃗
⋅
a
⃗
a
⃗
\left. \begin{array}{r} \left. \begin{array}{l} \vec{w}=\vec{b}-\vec{p} \\ \vec{w} \cdot \vec{p} = 0 \end{array} \right\} \Rightarrow (\vec{b}-\vec{p}) \cdot \vec{p} = 0\\ \vec{p} = k \vec{a} \end{array} \right\} \Rightarrow \left. \begin{array}{r} (\vec{b}-k \vec{a}) \cdot k \vec{a} = 0 \\ \vec{p} = k \vec{a} \end{array} \right\} \Rightarrow \vec{p} = \frac{\vec{a} \cdot \vec{b}}{\vec{a} \cdot \vec{a}} \vec{a}
w=b−pw⋅p=0}⇒(b−p)⋅p=0p=ka⎭
⎬
⎫⇒(b−ka)⋅ka=0p=ka}⇒p=a⋅aa⋅ba
那么投影矩阵
P
b
⃗
=
p
⃗
=
a
⃗
a
⃗
⋅
b
⃗
a
⃗
⋅
a
⃗
⇒
P
=
a
⃗
a
⃗
T
a
⃗
T
a
⃗
\begin{array}{l} & P\vec{b} = \vec{p} = \vec{a} \frac{\vec{a} \cdot \vec{b}}{\vec{a} \cdot \vec{a}} \\ \Rightarrow & P = \frac{\vec{a}\vec{a}^T}{\vec{a}^T\vec{a}} \end{array}
⇒Pb=p=aa⋅aa⋅bP=aTaaaT
点乘
点乘(Dot Product)的结果是点积,又称数量积或标量积(Scalar Product)
定义
a ⃗ ⋅ b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos α \vec{a} \cdot \vec{b} = |\vec{a}||\vec{b}|\cos{\alpha} a⋅b=∣a∣∣b∣cosα
推导
那么如何用解析几何来表示呢?
我们其实可以把
a
⃗
\vec{a}
a 旋转
α
\alpha
α 再缩放
∣
b
⃗
∣
/
∣
a
⃗
∣
|\vec{b}|/|\vec{a}|
∣b∣/∣a∣ 倍,就是
b
⃗
\vec{b}
b 了:
(
∣
b
⃗
∣
∣
a
⃗
∣
0
0
∣
b
⃗
∣
∣
a
⃗
∣
)
(
cos
α
−
sin
α
sin
α
cos
α
)
(
x
a
y
a
)
=
(
x
b
y
b
)
⇒
(
(
x
a
cos
α
−
y
a
sin
α
)
∣
b
⃗
∣
(
x
a
sin
α
+
y
a
cos
α
)
∣
b
⃗
∣
)
=
(
x
b
∣
a
⃗
∣
y
b
∣
a
⃗
∣
)
⇒
∣
a
⃗
∣
∣
b
⃗
∣
cos
α
=
x
a
x
b
+
y
a
y
b
\begin{array}{l} &\left ( \begin{matrix} \frac{|\vec{b}|}{|\vec{a}|} & 0 \\ 0 & \frac{|\vec{b}|}{|\vec{a}|} \\ \end{matrix} \right ) \left ( \begin{array}{rr} \cos{\alpha} & -\sin{\alpha} \\ \sin{\alpha} & \cos{\alpha} \\ \end{array} \right ) \left ( \begin{matrix} x_a \\ y_a \\ \end{matrix} \right )= \left ( \begin{matrix} x_b \\ y_b \\ \end{matrix} \right ) \\ \Rightarrow & \left ( \begin{matrix} (x_a\cos{\alpha} - y_a\sin{\alpha})|\vec{b}| \\ (x_a\sin{\alpha} + y_a\cos{\alpha})|\vec{b}| \\ \end{matrix} \right )= \left ( \begin{matrix} x_b|\vec{a}| \\ y_b|\vec{a}| \\ \end{matrix} \right ) \\ \Rightarrow & |\vec{a}||\vec{b}|\cos{\alpha} = x_a x_b + y_a y_b \end{array}
⇒⇒
∣a∣∣b∣00∣a∣∣b∣
(cosαsinα−sinαcosα)(xaya)=(xbyb)((xacosα−yasinα)∣b∣(xasinα+yacosα)∣b∣)=(xb∣a∣yb∣a∣)∣a∣∣b∣cosα=xaxb+yayb
几何意义
点乘的结果表示 a ⃗ \vec{a} a 在 b ⃗ \vec{b} b 方向上的投影与 b ⃗ \vec{b} b 的乘积,反映了两个向量在方向上的相似度,结果越大越相似。基于结果可以判断这两个向量是否是同一方向,是否正交垂直,具体对应关系为:
- a ⃗ ⋅ b ⃗ > 0 \vec{a} \cdot \vec{b} > 0 a⋅b>0 则方向基本相同,夹角在0°到90°之间
- a ⃗ ⋅ b ⃗ = 0 \vec{a} \cdot \vec{b} = 0 a⋅b=0 则正交,相互垂直
- a ⃗ ⋅ b ⃗ < 0 \vec{a} \cdot \vec{b} < 0 a⋅b<0 则方向基本相反,夹角在90°到180°之间
叉乘
叉乘(Cross Product)又称向量积(Vector Product)。
定义
a ⃗ × b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ sin α \vec{a} \times \vec{b} = |\vec{a}||\vec{b}|\sin{\alpha} a×b=∣a∣∣b∣sinα
推导
那么如何用解析几何来表示呢?
我们其实可以把
a
⃗
\vec{a}
a 旋转
α
\alpha
α 再缩放
∣
b
⃗
∣
/
∣
a
⃗
∣
|\vec{b}|/|\vec{a}|
∣b∣/∣a∣ 倍,就是
b
⃗
\vec{b}
b 了:
(
∣
b
⃗
∣
∣
a
⃗
∣
0
0
∣
b
⃗
∣
∣
a
⃗
∣
)
(
cos
α
−
sin
α
sin
α
cos
α
)
(
x
a
y
a
)
=
(
x
b
y
b
)
⇒
(
(
x
a
cos
α
−
y
a
sin
α
)
∣
b
⃗
∣
(
x
a
sin
α
+
y
a
cos
α
)
∣
b
⃗
∣
)
=
(
x
b
∣
a
⃗
∣
y
b
∣
a
⃗
∣
)
⇒
∣
a
⃗
∣
∣
b
⃗
∣
sin
α
=
x
a
y
b
−
x
b
y
a
\begin{array}{l} & \left ( \begin{matrix} \frac{|\vec{b}|}{|\vec{a}|} & 0 \\ 0 & \frac{|\vec{b}|}{|\vec{a}|} \\ \end{matrix} \right ) \left ( \begin{array}{rr} \cos{\alpha} & -\sin{\alpha} \\ \sin{\alpha} & \cos{\alpha} \\ \end{array} \right ) \left ( \begin{matrix} x_a \\ y_a \\ \end{matrix} \right )= \left ( \begin{matrix} x_b \\ y_b \\ \end{matrix} \right ) \\ \Rightarrow & \left ( \begin{matrix} (x_a\cos{\alpha} - y_a\sin{\alpha})|\vec{b}| \\ (x_a\sin{\alpha} + y_a\cos{\alpha})|\vec{b}| \\ \end{matrix} \right )= \left ( \begin{matrix} x_b|\vec{a}| \\ y_b|\vec{a}| \\ \end{matrix} \right ) \\ \Rightarrow & |\vec{a}||\vec{b}|\sin{\alpha} = x_a y_b - x_b y_a \end{array}
⇒⇒
∣a∣∣b∣00∣a∣∣b∣
(cosαsinα−sinαcosα)(xaya)=(xbyb)((xacosα−yasinα)∣b∣(xasinα+yacosα)∣b∣)=(xb∣a∣yb∣a∣)∣a∣∣b∣sinα=xayb−xbya
几何意义
如果以向量 a ⃗ \vec{a} a 和 b ⃗ \vec{b} b 为边构成一个平行四边形,那么这两个向量外积的模长与这个平行四边形的面积相等。
判断线段是否相交
我们有了上面的基础后,其实思路就一下打开了!
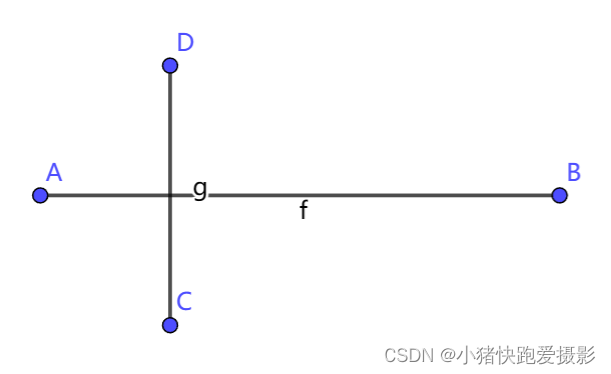
其实我们只要想着 A B → \overrightarrow{AB} AB 的两边是 C C C 和 D D D ,那么也就是说 A B → × A D → \overrightarrow{AB} \times \overrightarrow{AD} AB×AD 和 A B → × A C → \overrightarrow{AB} \times \overrightarrow{AC} AB×AC 有正有负,同时呢 C D → × C A → \overrightarrow{CD} \times \overrightarrow{CA} CD×CA 和 C D → × C B → \overrightarrow{CD} \times \overrightarrow{CB} CD×CB 有正有负(这里要注意一下叉乘可能为0的情况,比如说 A A A 在 C D → \overrightarrow{CD} CD 上)。这里我们有正有负采用直接判断而不是相乘小于零,这是因为相乘可能存在数值溢出等问题。而且一般的,和零的判断比乘法快很多。
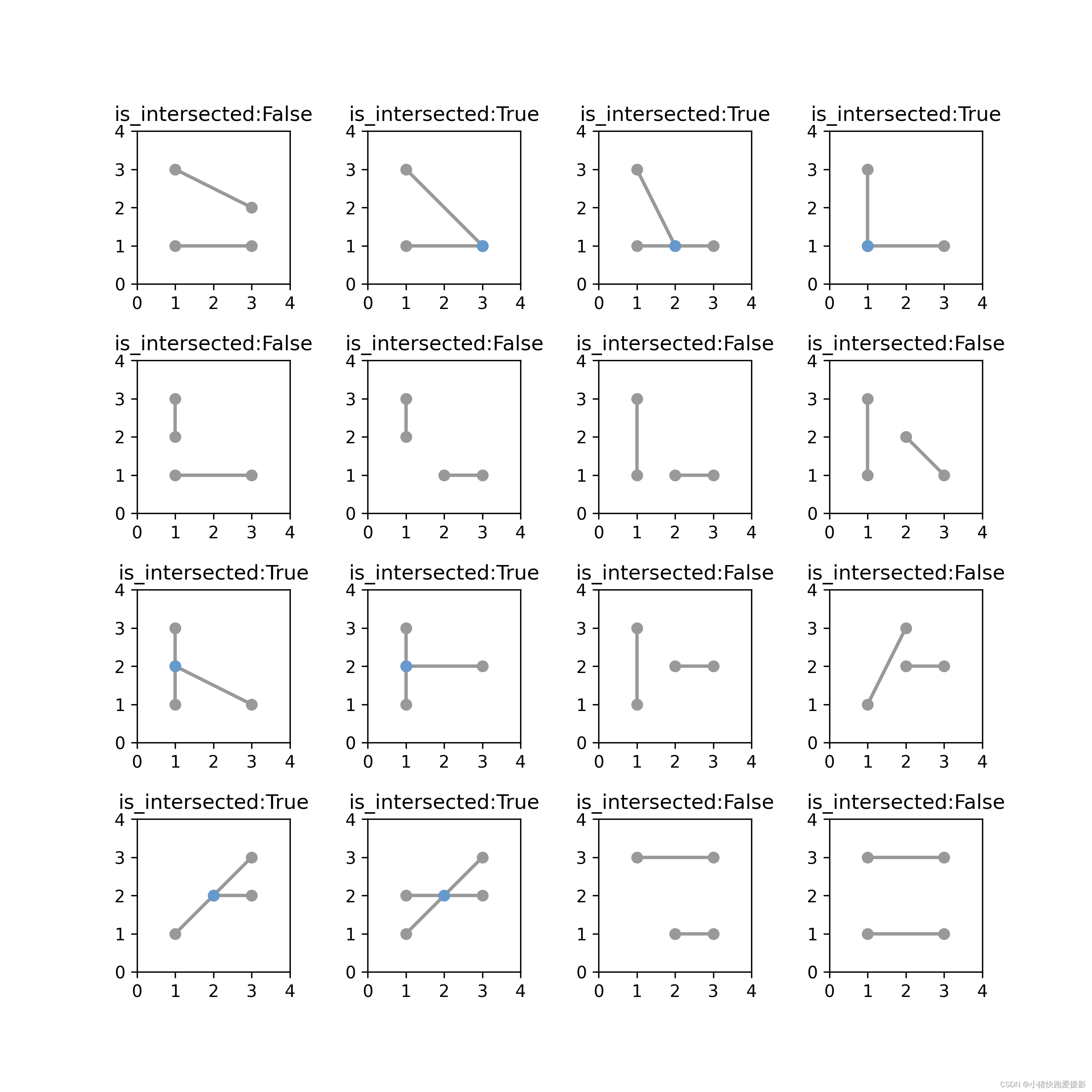
我们直接上测试用例看看效果!!!
代码
C++
#include <iostream>
#include <chrono>
using namespace std;
int cross_product(int x1, int y1, int x2, int y2) {
// 计算向量 (x1, y1) 和向量 (x2, y2) 的叉积
return x1 * y2 - x2 * y1;
}
int dot_product(int x1, int y1, int x2, int y2) {
// 计算向量 (x1, y1) 和向量 (x2, y2) 的点乘
return x1 * x2 + y1 * y2;
}
bool is_intersected(int x1, int y1, int x2, int y2, int x3, int y3, int x4, int y4) {
/*
判断线段 (x1, y1)-(x2, y2) 和线段 (x3, y3)-(x4, y4) 是否相交
AB×AC
AB×AD
CD×CA
CD×CB
*/
if ((max(x1, x2) < min(x3, x4)) or (max(x3, x4) < min(x1, x2)) or (max(y1, y2) < min(y3, y4)) or (
max(y3, y4) < min(y1, y2))) {
return false;
}
int abx = x2 - x1;
int aby = y2 - y1;
int acx = x3 - x1;
int acy = y3 - y1;
int adx = x4 - x1;
int ady = y4 - y1;
int bcx = x3 - x2;
int bcy = y3 - y2;
int cdx = x4 - x3;
int cdy = y4 - y3;
int cp1 = cross_product(abx, aby, acx, acy);
int cp2 = cross_product(abx, aby, adx, ady);
int cp3 = cross_product(cdx, cdy, -acx, -acy);
int cp4 = cross_product(cdx, cdy, -bcx, -bcy);
// 如果两个叉积的乘积小于0,则两个向量在向量 (x1, y1)-(x2, y2) 的两侧,即线段相交
if (((cp1 > 0 and 0 > cp2) or (cp1 < 0 and 0 < cp2) or cp1 == 0 or cp2 == 0) and
((cp3 > 0 and 0 > cp4) or (cp3 < 0 and 0 < cp4) or cp3 == 0 or cp4 == 0)) {
return true;
}
return false;
}
int test(int n) {
int res = 0;
for (auto x1 = 0; x1 < n; x1++) {
for (auto y1 = 0; y1 < n; y1++) {
for (auto x2 = 0; x2 < n; x2++) {
for (auto y2 = 0; y2 < n; y2++) {
if (x1 == x2 and y1 == y2) {
continue;
}
for (auto x3 = 0; x3 < n; x3++) {
for (auto y3 = 0; y3 < n; y3++) {
for (auto x4 = 0; x4 < n; x4++) {
for (auto y4 = 0; y4 < n; y4++) {
if (x3 == x4 and y3 == y4) {
continue;
}
res += is_intersected(x1, y1, x2, y2, x3, y3, x4, y4);
}
}
}
}
}
}
}
}
return res;
}
int main() {
auto start = std::chrono::high_resolution_clock::now();
std::cout << test(7) << std::endl;
auto finish = std::chrono::high_resolution_clock::now();
std::chrono::duration<double> elapsed = finish - start;
std::cout << "Elapsed time: " << elapsed.count() << " s\n" << std::endl;
return 0;
}
Python
from time import time
import math
from numba import njit
@njit
def cross_product(x1, y1, x2, y2):
"""
计算向量 (x1, y1) 和向量 (x2, y2) 的叉积
"""
return x1 * y2 - x2 * y1
@njit
def dot_product(x1, y1, x2, y2):
"""
计算向量 (x1, y1) 和向量 (x2, y2) 的点乘
"""
return x1 * x2 + y1 * y2
@njit
def is_intersected(x1, y1, x2, y2, x3, y3, x4, y4):
"""
判断线段 (x1, y1)-(x2, y2) 和线段 (x3, y3)-(x4, y4) 是否相交
AB×AC
AB×AD
CD×CA
CD×CB
"""
if (max(x1, x2) < min(x3, x4)) or (max(x3, x4) < min(x1, x2)) or (max(y1, y2) < min(y3, y4)) or (
max(y3, y4) < min(y1, y2)):
return False
abx = x2 - x1
aby = y2 - y1
acx = x3 - x1
acy = y3 - y1
adx = x4 - x1
ady = y4 - y1
bcx = x3 - x2
bcy = y3 - y2
cdx = x4 - x3
cdy = y4 - y3
cp1 = cross_product(abx, aby, acx, acy)
cp2 = cross_product(abx, aby, adx, ady)
cp3 = cross_product(cdx, cdy, -acx, -acy)
cp4 = cross_product(cdx, cdy, -bcx, -bcy)
# 如果两个叉积的乘积小于0,则两个向量在向量 (x1, y1)-(x2, y2) 的两侧,即线段相交
if ((cp1 > 0 > cp2) or (cp1 < 0 < cp2) or cp1 == 0 or cp2 == 0) and (
(cp3 > 0 > cp4) or (cp3 < 0 < cp4) or cp3 == 0 or cp4 == 0):
return True
return False
def test(n):
res = 0
for x1 in range(n):
for y1 in range(n):
for x2 in range(n):
for y2 in range(n):
if x1 == x2 and y1 == y2:
continue
for x3 in range(n):
for y3 in range(n):
for x4 in range(n):
for y4 in range(n):
if x3 == x4 and y3 == y4:
continue
res += is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)
return res
if __name__ == '__main__':
s = time()
print(test(7))
print(time() - s)
画图代码
# main.py
import matplotlib.pyplot as plt
from shapely.geometry import Point, LineString, Polygon
from shapely.plotting import plot_polygon, plot_points, plot_line
from csdn_line_intersect import is_intersected
from figures import BLUE, GRAY, set_limits
fig = plt.figure(1, figsize=(9, 9), dpi=300)
fig.subplots_adjust(wspace=0.5, hspace=0.5) # 调整边距和子图的间距
ax = fig.add_subplot(4, 4, 1)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 3, 2
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 2)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 3, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 3)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 2, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 4)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 5)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 2
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 6)
x1, y1, x2, y2 = 2, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 2
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 7)
x1, y1, x2, y2 = 2, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 8)
x1, y1, x2, y2 = 2, 2, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 9)
x1, y1, x2, y2 = 1, 2, 3, 1
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 10)
x1, y1, x2, y2 = 1, 2, 3, 2
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 11)
x1, y1, x2, y2 = 2, 2, 3, 2
x3, y3, x4, y4 = 1, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 12)
x1, y1, x2, y2 = 2, 2, 3, 2
x3, y3, x4, y4 = 2, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 13)
x1, y1, x2, y2 = 2, 2, 3, 2
x3, y3, x4, y4 = 3, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 14)
x1, y1, x2, y2 = 1, 2, 3, 2
x3, y3, x4, y4 = 3, 3, 1, 1
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 15)
x1, y1, x2, y2 = 2, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 3, 3
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
ax = fig.add_subplot(4, 4, 16)
x1, y1, x2, y2 = 1, 1, 3, 1
x3, y3, x4, y4 = 1, 3, 3, 3
a = LineString([(x1, y1), (x2, y2)])
b = LineString([(x3, y3), (x4, y4)])
plot_line(a, ax=ax, color=GRAY)
plot_line(b, ax=ax, color=GRAY)
plot_points(a.intersection(b), ax=ax, color=BLUE)
ax.set_title(f'is_intersected:{is_intersected(x1, y1, x2, y2, x3, y3, x4, y4)}')
set_limits(ax, 0, 4, 0, 4)
plt.savefig('output.png')
plt.show()
测试结果
C++: 0.0157648 s
Python(numba): 1.3376786708831787 s
Python(no numba): 3.585803985595703 s
Python(shapely): 73.45080494880676 s



![[点云分割] Clustering of Pointclouds into Supervoxels](https://img-blog.csdnimg.cn/b8440142c52045e0b39141cdc8a594f1.png)