1.首先在功能包创建一个srv文件夹
如上图所示,vehicle_control是我的功能包,创建一个srv文件夹
2.使用touch指令创建服务文件
touch Ranging.srv
3.在文件内输入服务数据
横线代表分割符,上面的是客户端发送的数据,下面是服务器返回的数据
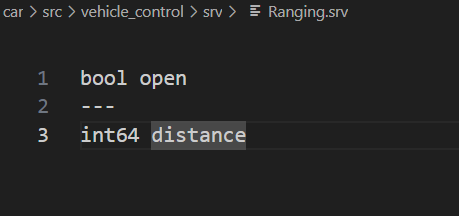
具体使用什么类型参考自己的项目,以及ros支持类型
4.注册ROS
修改package.xml
在package.xml中添加如下代码,注意添加的位置,放在之前。(上一步自定义msg时已完成)
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
修改CMakeLists.txt
在find_package中添加message_generation(已完成)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
取消add_service_files的注释,并把刚刚定义的消息文件添加进去
add_service_files(
FILES
AddTwoInts_alone.srv
IsOpenyuntai.srv
Ranging.srv
)
在catkin_package中添加CATKIN_DEPENDS message_runtime
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES beginner_tutorials
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
完成以上工作后,编译整个工作空间
cd ~/car
catkin_make

显示已经做好的服务
rossrv show vehicle_control/Ranging.srv

完成
5.服务的使用
客户端
import rospy
# imports the AddTwoInts service
from rospy_tutorials.srv import *
## add two numbers using the add_two_ints service
## @param x int: first number to add
## @param y int: second number to add
def add_two_ints_client(x, y):
# NOTE: you don't have to call rospy.init_node() to make calls against
# a service. This is because service clients do not have to be
# nodes.
# block until the add_two_ints service is available
# you can optionally specify a timeout
rospy.wait_for_service('add_two_ints')
try:
# create a handle to the add_two_ints service
add_two_ints = rospy.ServiceProxy('add_two_ints', AddTwoInts)
print "Requesting %s+%s"%(x, y)
# simplified style
resp1 = add_two_ints(x, y)
# formal style
resp2 = add_two_ints.call(AddTwoIntsRequest(x, y))
if not resp1.sum == (x + y):
raise Exception("test failure, returned sum was %s"%resp1.sum)
if not resp2.sum == (x + y):
raise Exception("test failure, returned sum was %s"%resp2.sum)
return resp1.sum
except rospy.ServiceException, e:
print "Service call failed: %s"%e
def usage():
return "%s [x y]"%sys.argv[0]
if __name__ == "__main__":
argv = rospy.myargv()
if len(argv) == 1:
import random
x = random.randint(-50000, 50000)
y = random.randint(-50000, 50000)
elif len(argv) == 3:
try:
x = int(argv[1])
y = int(argv[2])
except:
print usage()
sys.exit(1)
else:
print usage()
sys.exit(1)
print "%s + %s = %s"%(x, y, add_two_ints_client(x, y))
服务端
#!/usr/bin/env python
NAME = 'add_two_ints_server'
# import the AddTwoInts service
from beginner_tutorials.srv import *
import rospy
def add_two_ints(req):
print("Returning [%s + %s = %s]" % (req.a, req.b, (req.a + req.b)))
sum = req.a + req.b
return AddTwoIntsResponse(sum)
def add_two_ints_server():
rospy.init_node(NAME)
s = rospy.Service('add_two_ints', AddTwoInts, add_two_ints)
print "Ready to add Two Ints"
# spin() keeps Python from exiting until node is shutdown
rospy.spin()
if __name__ == "__main__":
add_two_ints_server()