微信公众号上线,搜索公众号小灰灰的FPGA,关注可获取相关源码,定期更新有关FPGA的项目以及开源项目源码,包括但不限于各类检测芯片驱动、低速接口驱动、高速接口驱动、数据信号处理、图像处理以及AXI总线等
本节目录
一、滤波器定义
二、滤波器分类
(1)模拟滤波器
(2)数字滤波器
(3)经典滤波器
(4)现代滤波器
(5)FIR和IIR滤波器
(6)滤波器的特征参数
本节内容
一、滤波器定义
滤波器是一种用来减少或消除干扰的电气部件,将输入信号进行过滤处理得到所需的信号。对特定频率的频点或该频点以外的频率信号进行有效滤除,从而实现消除干扰、获取某特定频率信号的功能。
二、滤波器分类
根据处理的信号形式,可以将滤波器划分为模拟滤波器和数字滤波器。
(1)模拟滤波器
模拟滤波器由电阻、电容、电感、运放等电气元件组成,对模拟信号进行滤波处理。
(2)数字滤波器
数字滤波器通过软件或数字信号处理器件对离散化的数字信号进行滤波处理。通过对数字信号的运算处理,改变信号频谱,完成滤波作用的算法或装置,可分为精度滤波器和现代滤波器。
数字滤波器从实现的网络结构或单位脉冲响应分为无限脉冲响应(Infinite Impulse Response,IIR)滤波器和有限脉冲响应(Finite Impulse Response,FIR)滤波器。
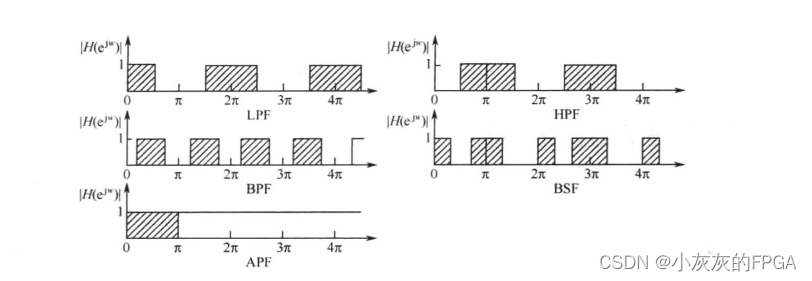
(3)经典滤波器
经典滤波器,假设输入信号x(n)中的有效信号和噪声信号分布在不同频带,当x(n)通过一个线性滤波系统后,可以有效地减少或去除噪声信号成分。经典滤波器主要有低通滤波器(Low Psss Filter,LPF)、高通滤波器(High Pass Filter,HPF)、带通滤波器(Band Pass Filter,BPF)、带阻滤波器(Band Stop Filter,BSF)、全通滤波器(All Pass Filte,APF)。
(4)现代滤波器
现代滤波器是从含有噪声的数据记录(时间序列)中估计出信号的某些特征或信号本身。把信号和噪声都视为随机信号,利用统计特性(自相关函数、功率谱函数)推导出一套最佳的估值算法,然后用硬件或软件实现。包括维纳滤波器(Wiener Filter)、卡尔曼滤波器(Kalman Filter)、线性滤波器(Liner Filter)、自适应滤波器(Adaptive Filter)。
(5)FIR和IIR滤波器
FIR和IIR滤波器均是在时序对信号进行各种处理,以实现滤除干扰获取有用信号的功能。
FIR和IIR的区别在于两者的系统函数结构不同。
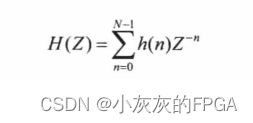
FIR的系统函数,FIR具有严格的线性相位特性,不存在输出对输入的反馈结构。
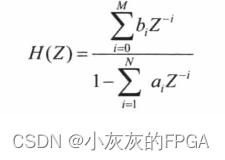
IIR的系统函数,IIR无法实现线性相位特性,其频率选择性较好相位的非线性越严重,存在输出对输入的反馈。
(6)滤波器的特征参数
设计一个可实现的滤波器,并且使设计的滤波器尽可能地逼近理想滤波器性能,需要考虑特征参数。
以低通滤波器为例,低通滤波器的通带截止频率为ωp,通带容限为α1,阻带截止频率为ωs,阻带容限为α2。
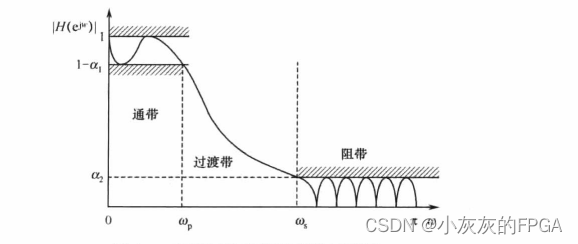
通带定义为|ω|≤ ωp,1-α1≤|H(e^(jω))|≤1
阻带定义为ωs≤|ω|≤ π,|H(e^(jω))|≤α2
过渡带定义为ωp≤|ω|≤ ωs
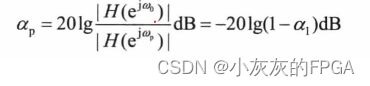
通带内和阻带内允许的衰减用dB表示
通带内允许的最大衰减αp
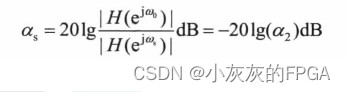
阻带内允许的最大衰减αs


![[Android]使用Retrofit进行网络请求](https://img-blog.csdnimg.cn/14b54f713bcc4c758b856d6c3fbf92da.png)