文章目录
前言
1 连接到Pixhawk
2 通过Mission Planner进行设置
3 测试传感器
4 参数说明
前言
XL-Maxbotix-EZ 系列模拟声纳(XL-MaxSonar-EZ0、EZ4 和 EZL0)是相对便宜的短距离(7m 至 10m)测距仪,主要设计用于室内,但也成功用于室外的 Copter 和 Rover。它们是 I2C 声纳(I2C sonar)的前身。
EZ4(推荐)的光束最窄,抗噪能力最强,而 EZ0 的光束最宽,灵敏度更高。长距离 EZL0 的灵敏度与 EZ0 相同,但距离为 10m(而不是 7m)。
1 连接到Pixhawk
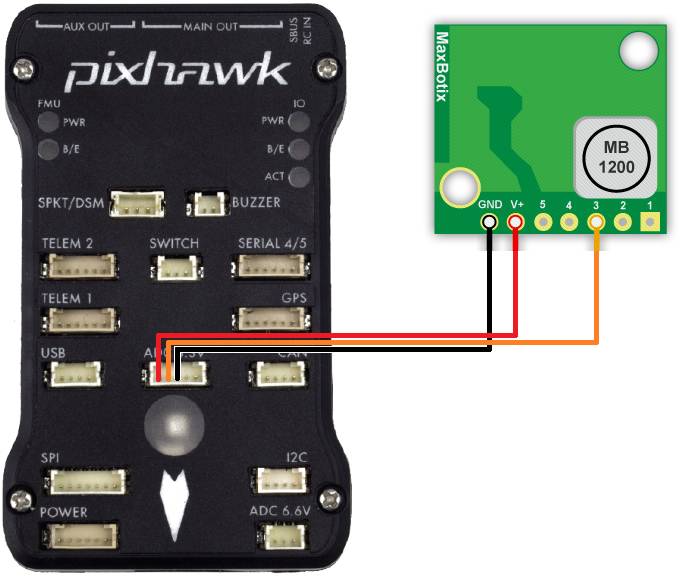
声纳应连接到 Pixhawk 的 ADC 3.3V 端口,如下图所示。Pixhawk 将提供声纳所需的稳压 5V 电源。
2 通过Mission Planner进行设置
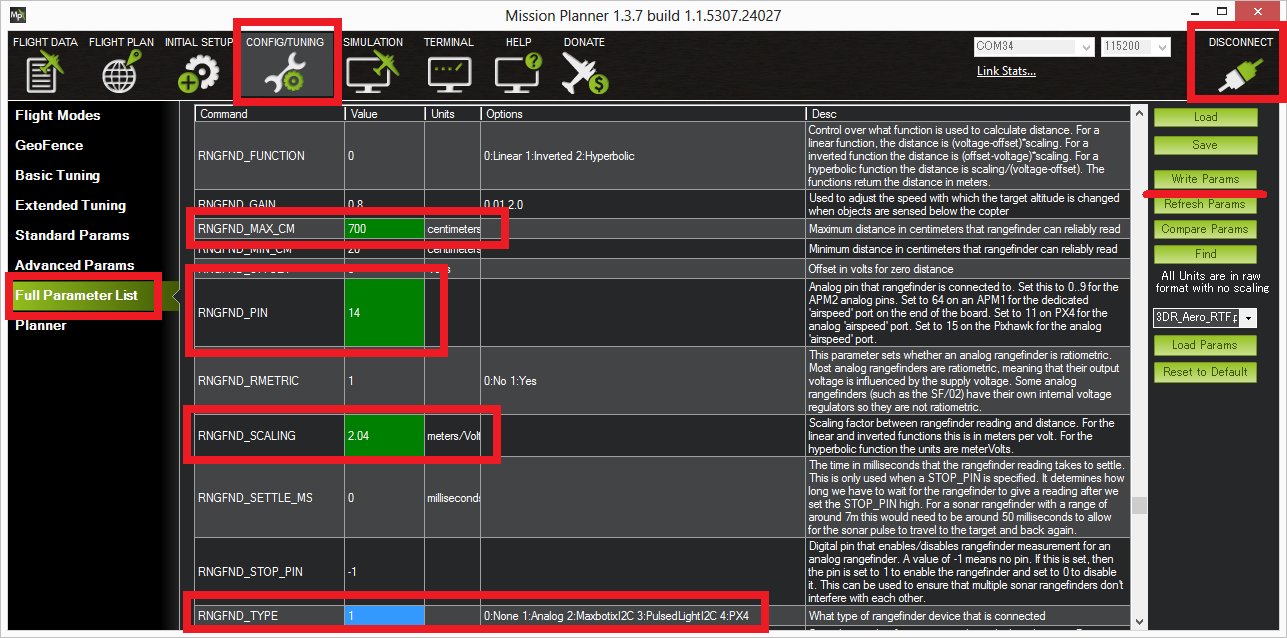
请首先连接任务规划器,然后打开"配置/调优">>"全参数列表"页面并设置以下参数(以第一个测距仪为例:
- RNGFND1_PIN = "14",表示 Pixhawk 的 ADC 3.3v #2 引脚;
- 如果使用 EZ0 或 EZ4,RNGFND1_MAX_CM ="700"(即最大测距 7m);如果使用 EZL0,RNGFND1_MAX_CM ="1000";
- 如果使用 EZ0 或 EZ4,RNGFND1_SCALING = "2.04"(即 7m / 5v);如果使用 EZL0,RNGFND1_SCALING = "4.08"(即 10m / 5v);
- RNGFND1_TYPE = "1"(模拟)。
!Note
Maxbotix 模拟测距仪的数据表显示,其输出电压为 Vcc/1024 v/cm,或 5v(ADC 3.3v 端口提供)时为 0.488 v/m,即每伏 2.04m。根据数据表,量程为 7.6m,但模拟输出仅限于 7m。由于我们只能读取 3.3v 以下的电压,这意味着 6.75m 是它真正能测量的最远距离。
3 测试传感器
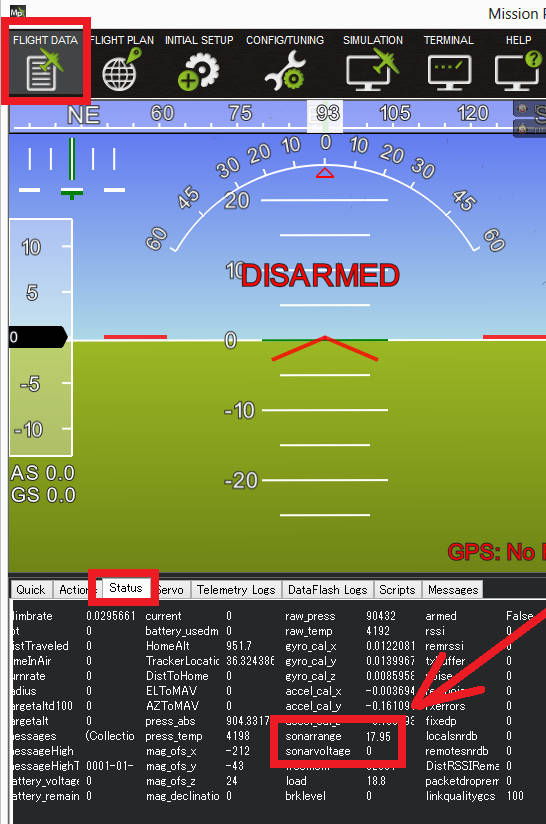
传感器读取的距离可在Mission Planner飞行数据屏幕的状态选项卡中查看。仔细查看"sonarrange"(声纳范围)。
4 参数说明
1、RNGFND1_TYPE:测距仪类型
连接测距仪的类型。
| Values | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
2、RNGFND1_MIN_CM:测距仪最小距离
测距仪能可靠读取的最小距离(厘米)。
| Increment | Units |
|---|---|
| 1 | centimeters |
3、RNGFND1_MAX_CM:测距仪最大距离
测距仪能可靠读取的最大距离(厘米)。
| Increment | Units |
|---|---|
| 1 | centimeters |