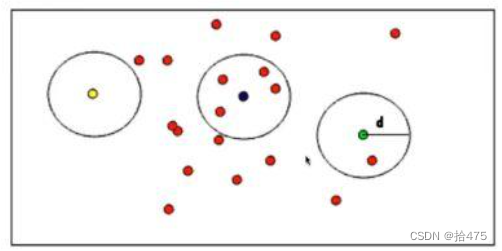
PCL 半径滤波剔除噪点(二)
news2026/2/11 17:21:08
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1222975.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
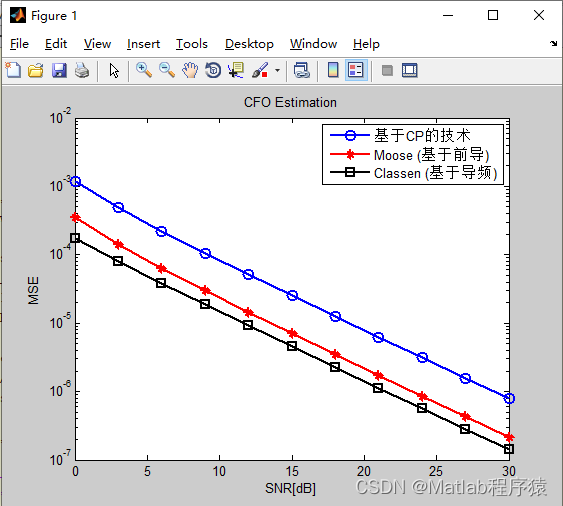
【MATLAB源码-第82期】基于matlab的OFDM系统载波频移偏差(CFO)估计,对比三种不同的方法。
操作环境:
MATLAB 2013b
1、算法描述
正交频分复用(OFDM)系统中的载波频率偏移(CFO)估计是一项关键技术,用于确保数据传输的准确性和效率。CFO通常由于振荡器频率不匹配和多普勒频移引起。不同的CFO估计…
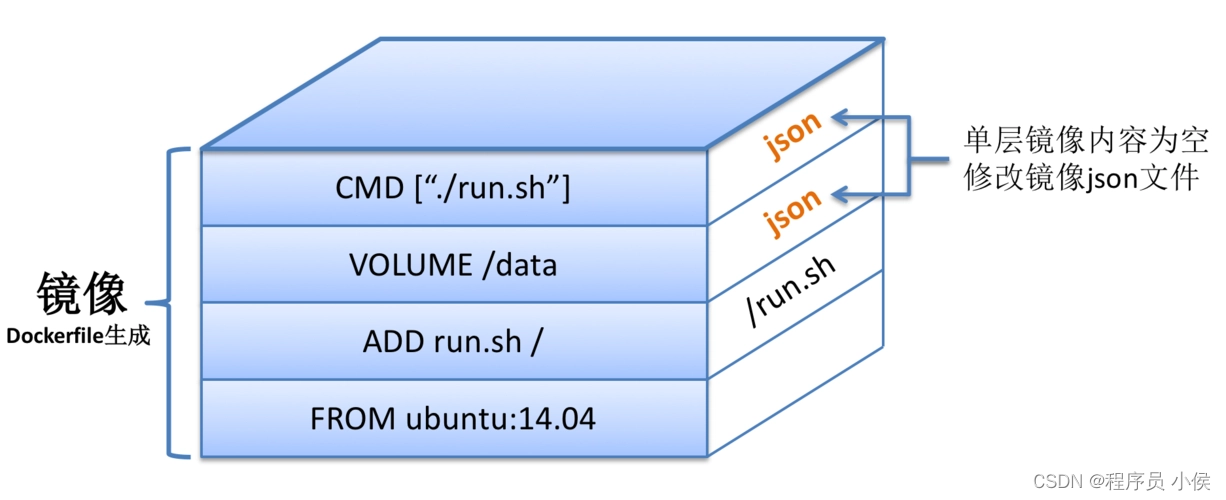
Docker Volume: 实现容器间数据共享与持久化的利器
文章目录 Docker Volume的作用Docker Volume与容器内数据的比较优势劣势 Docker Volume的创建和管理创建Docker Volume管理Docker Volume 演示Docker Volume的挂载Docker Volume的生命周期安全性考虑与Docker Volume应用场景Docker Volume与多容器协作容器迁移与Docker Volume未…

电子学会2023年6月青少年软件编程(图形化)等级考试试卷(二级)真题,含答案解析
青少年软件编程(图形化)等级考试试卷(二级)
一、单选题(共25题,共50分) 1. 运行下列哪段程序,可以让狗狗走到木屋门口?( ) A.
vite vue3安装element-plus
准备
参考
安装
官网
yarn add element-plus完整引入
如果你对打包后的文件大小不是很在乎,那么使用完整导入会更方便。 main.ts
// main.ts
import { createApp } from vue
import ElementPlus from element-plus
import element-plus/dist/index.css
import…

数据资产到底如何入表?
2024年1月1日起,财政部《企业数据资源相关会计处理暂行规定》正式施行,距离现在只有一个多月的时间。
数据资源入表意味着企业可以将数据资源确认为企业资产负债表中“资产”一项。对于拥有丰富数据资源的企业来说,有望在财务报表中体现其真…
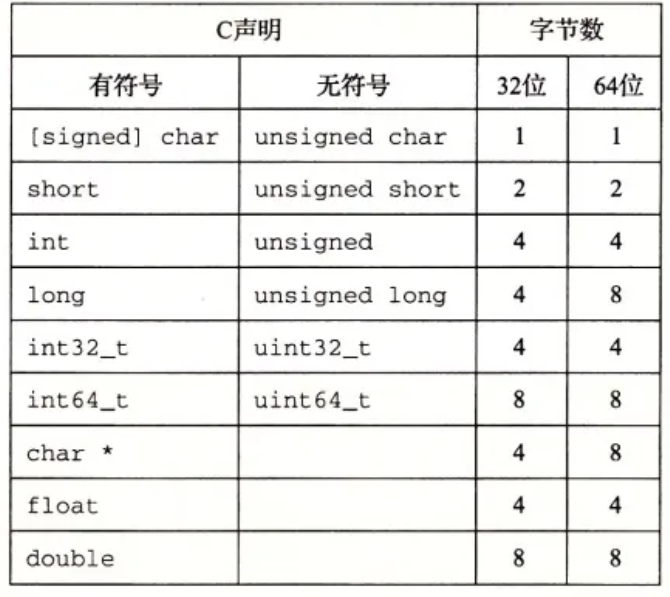
C++软件开发面试场景题
自己在秋招过程中遇到的一些场景题
海量数据N取Top K个元素,复杂度是多少
在处理海量数据中获取前K个元素(Top K)的问题中,通常会使用一些高效的算法来减少时间和空间复杂度。以下是两种常见的解决方案和它们的复杂度࿱…
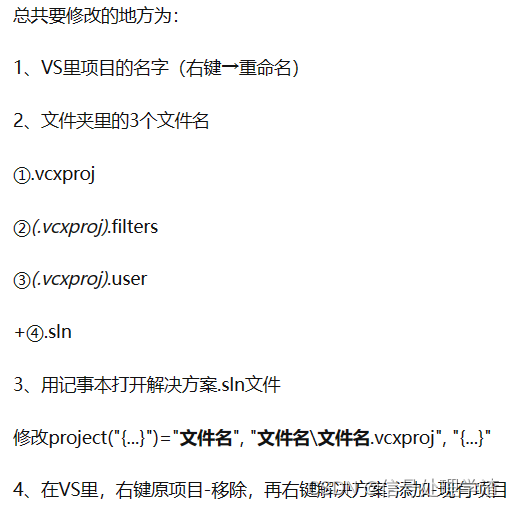
VS中修改解决方案名称和项目名称
如何修改visual studio2019中的项目名 - 知乎 (zhihu.com) 查了很多,还是这个可行。虽然文中说不是最简单的,但在所查找资料中是可行且最简单的。
要点主要是:
1、比如我们复制一个解决方案,最好是带代码哈,也就是添…

Python 爬虫入门
文章目录 Python 爬虫入门requests 库beautifulsoup4库函数findall(),find()函数get() 爬虫实例 1:抓小说爬虫实例 2:抓豆瓣 top 250 的电影信息后记 Python 爬虫入门
Python 的爬虫功能使得程序员可以快速抓取并分析网页中的信息࿰…
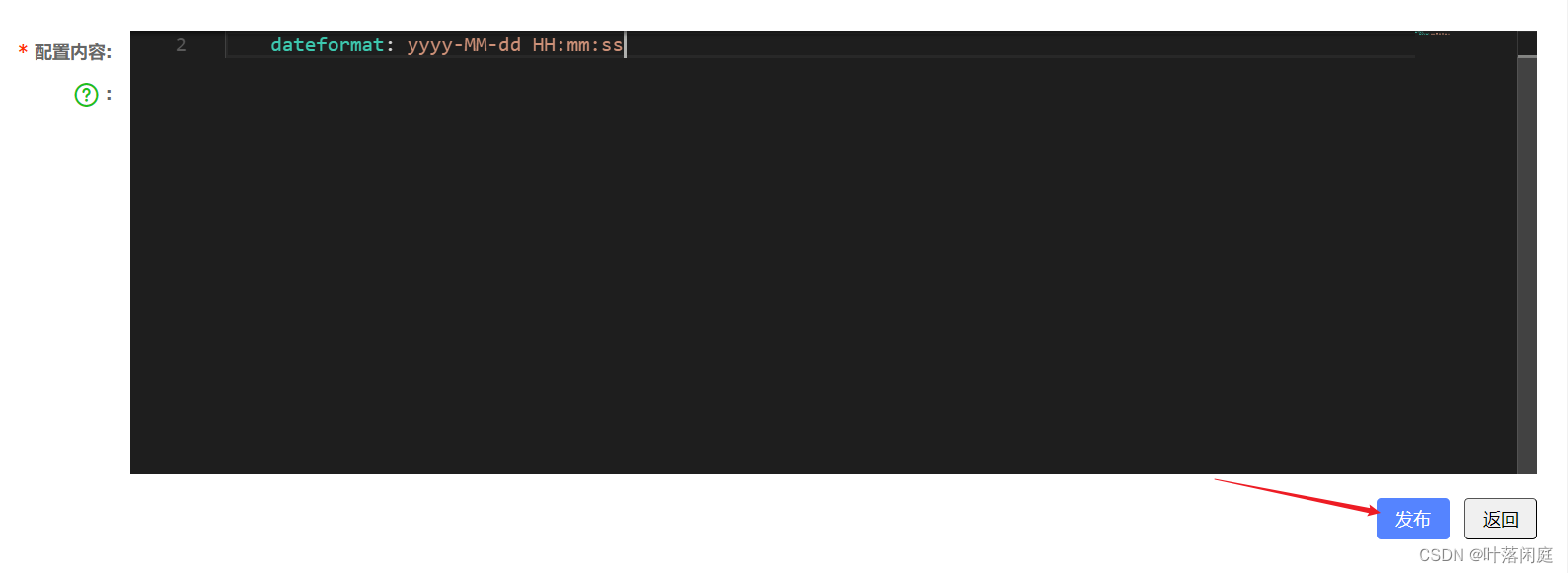
【Nacos】配置管理、微服务配置拉取、实现配置热更新、多环境配置
🐌个人主页: 🐌 叶落闲庭 💨我的专栏:💨 c语言 数据结构 javaEE 操作系统 Redis 石可破也,而不可夺坚;丹可磨也,而不可夺赤。 Nacos 一、nacos实现配置管理1.1 统一配置管…
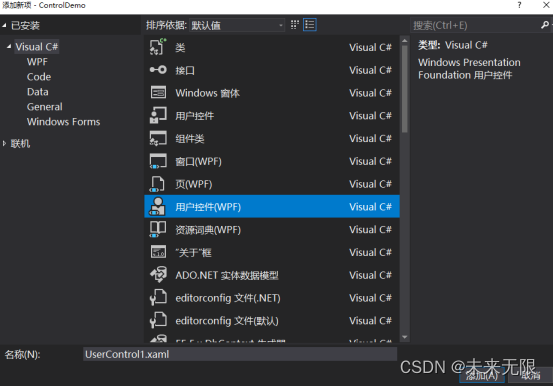
C#WPF用户控件及自定义控件实例
本文演示C#WPF自定义控件实例
用户控件(UserControl)和自定义控件(CustomControl)都是对UI控件的一种封装方式,目的都是实现封装后控件的重用。 只不过各自封装的实现方式和使用的场景上存在差异。
1 基于UserControl 创建
创建控件最简单一个方法就是基于UserControl …

基于Vue+SpringBoot的高校学生管理系统 开源项目
项目编号: S 029 ,文末获取源码。 \color{red}{项目编号:S029,文末获取源码。} 项目编号:S029,文末获取源码。 目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块2.1 学生管理模块2.2 学院课程模块2.3 学…

java智慧校园信息管理系统源码带微信小程序
一、智慧校园的定义
智慧校园指的是以云计算和物联网为基础的智慧化的校园工作、学习和生活一体化环境。以各种应用服务系统为载体,将教学、科研、管理和校园生活进行充分融合,让校园实现无处不在的网络学习、融合创新的网络科研、透明高效的校务治理、…
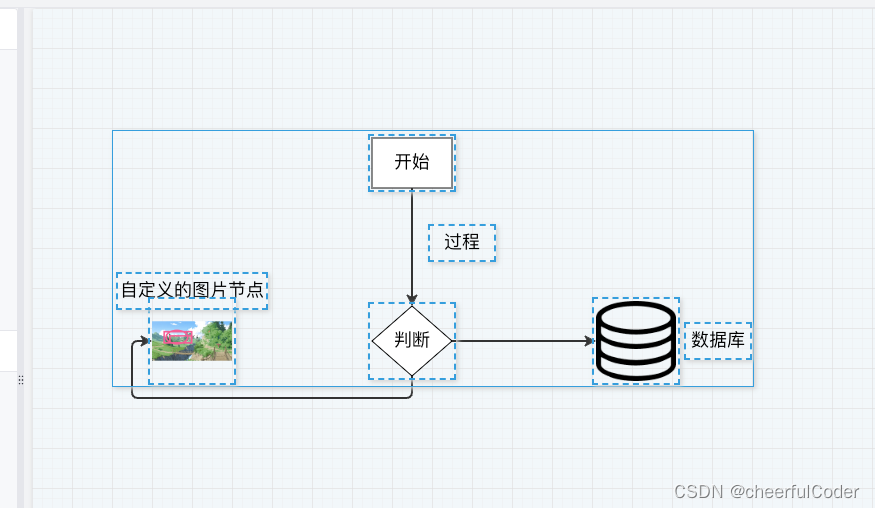
利用X6 制作一个简单的流程图工具
介绍
项目模版使用 我自己基于 arco-design 封装的一个 B 端项目模版 。 地址:https://github.com/duKD/antv-x6-org
运用 antv/X6 : https://x6.antv.antgroup.com/ 来实现 一个简单的流程图工具
项目预览:
功能
支持框选 alt鼠标左键…
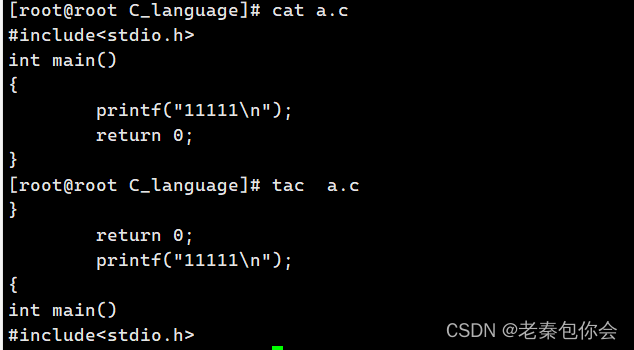
linux课程第一课------命令的简单的介绍
作者前言 🎂 ✨✨✨✨✨✨🍧🍧🍧🍧🍧🍧🍧🎂 🎂 作者介绍: 🎂🎂 🎂 🎉🎉🎉…

Springboot+vue的学生成绩管理系统(有报告),Javaee项目,springboot vue前后端分离项目。
演示视频: Springbootvue的学生成绩管理系统(有报告),Javaee项目,springboot vue前后端分离项目。 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家…
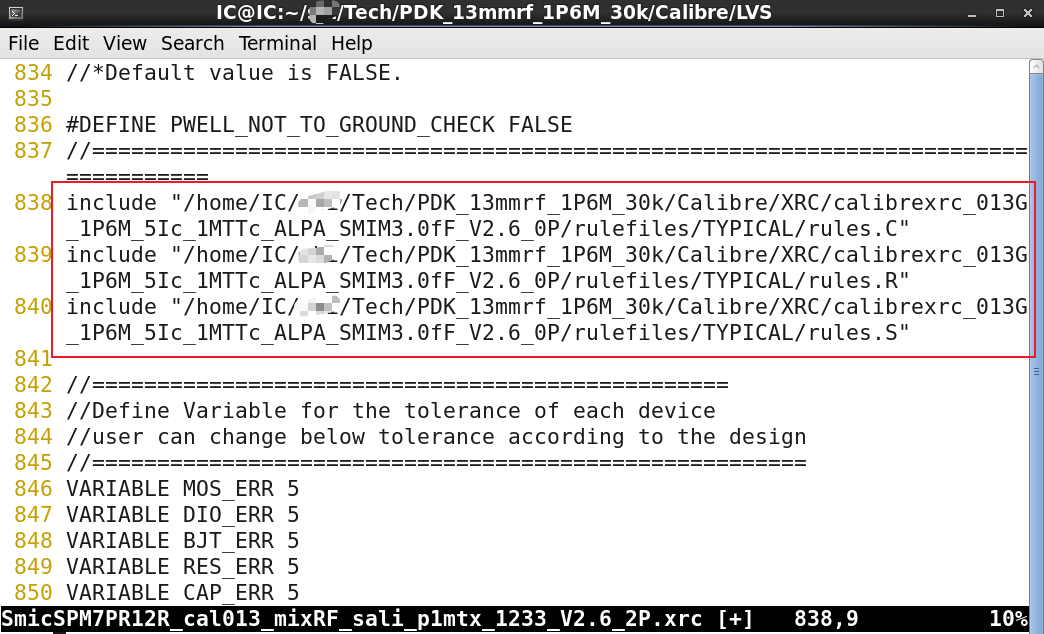
cadence virtuoso PEX option error
在设置PEX options时出现error。
Error while compiling rules file /home/IC/Tech/PDk_13mmrf_1P6M_30k/Calibre/LvS/SmicSPM7PR12R_cal013_mixR_sali_pimtx_1233_v2.6_2P . xrc: ErrorINCLi on lire 838of /home/IC/Tech/PDK_13mmrf_1P6M_30k/Calibre/LvS/SmicSPM7PR12R_cal…

深入理解Linux网络笔记(六):深度理解TCP连接建立过程
本文为《深入理解Linux网络》学习笔记,使用的Linux源码版本是3.10,网卡驱动默认采用的都是Intel的igb网卡驱动 Linux源码在线阅读:https://elixir.bootlin.com/linux/v3.10/source 5、深度理解TCP连接建立过程
1)、深入理解liste…
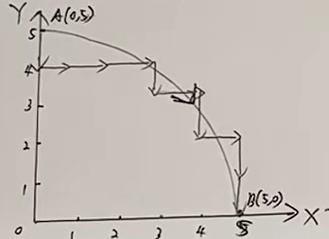
圆弧插补-逐点比较法
圆弧插补-逐点比较法 逐点比较法直线插补流程 逐点比较法直线插补流程 逐点比较法第I象限逆圆插补 在圆弧加工过程中,要描述刀具位置与被加工圆弧之间的相对位置关系,可用动点到圆心的距离大小来反映。
如下图所示,假设被加工零件的轮廓为第…


Linux通过端口号找到对应的服务及其安装位置
Linux服务器中,通过端口号找到对应的服务及其安装位置,需要两步操作,如下:
第一步:根据端口号,确定对应的进程号(以redis服务为例)
netstat -antup|grep 6379第二步:通…