文章目录
- 运行环境:
- 原理
- 1.1 ros中的代码
- 1)socketcan_bridge
- 2)测试的ros-python包
- 3)keil5中数据解析
- 4)USB-CAN连接
- 5)启动指令
运行环境:
ubuntu18.04.melodic
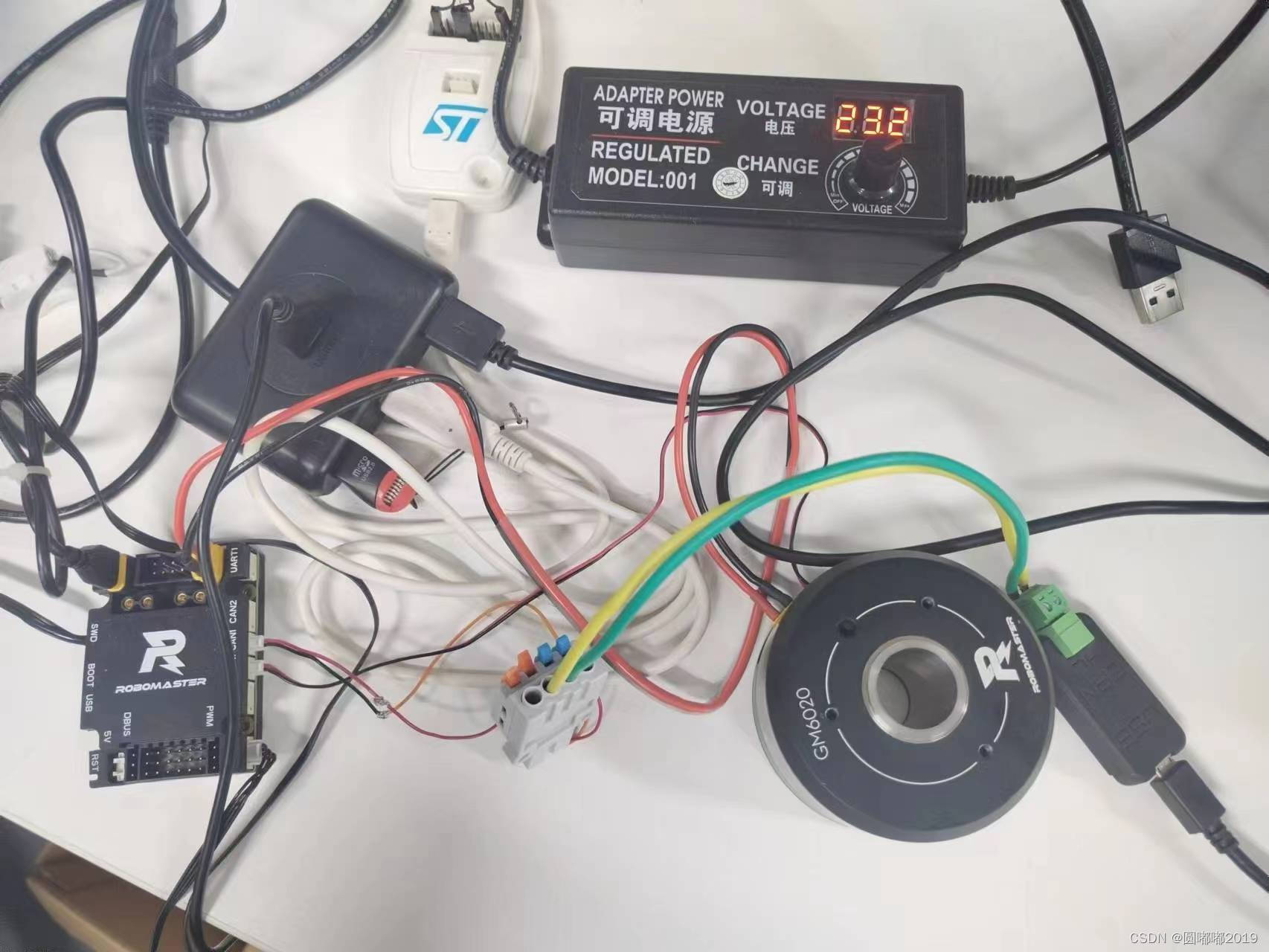
STM32:DJI Robomaster C板
ROS:18.04
硬件:USB-CAN(选支持Linux驱动的)
原理
1.1 ros中的代码
1)socketcan_bridge
http://wiki.ros.org/socketcan_bridge
主要利用socketcan_bridge_node节点,相当于ros和stm32桥梁作用
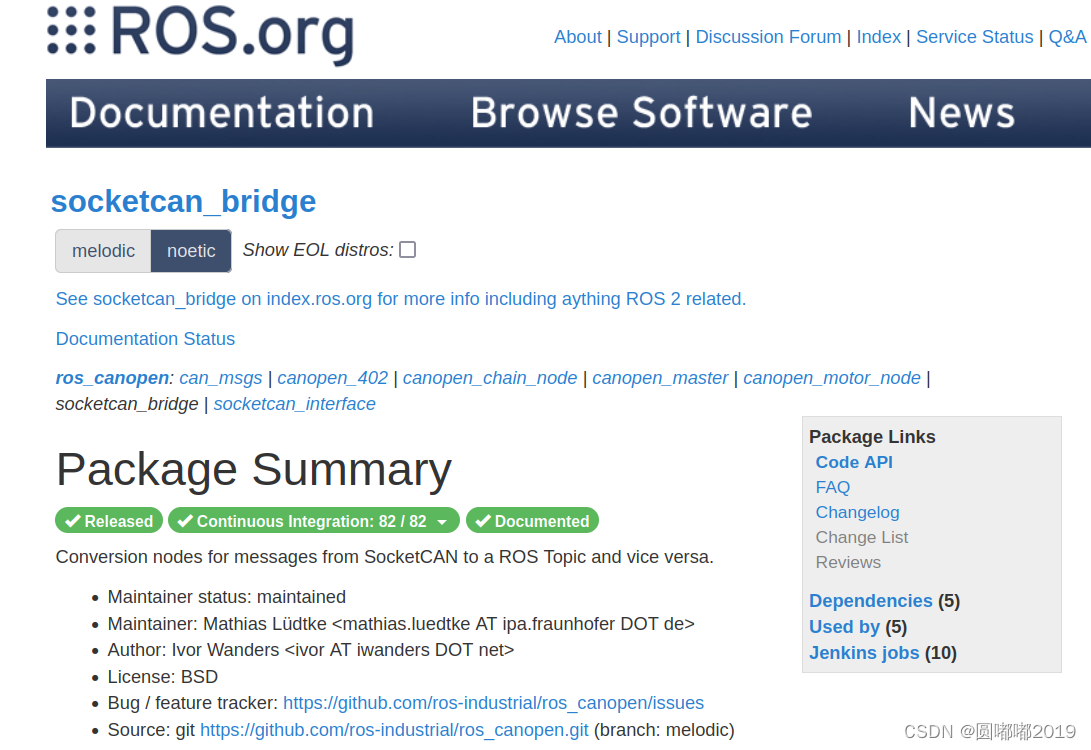
原理解释:
Subscribed Topics
sent_messages (can_msgs/Frame)
它可以监听话题为sent_messages,消息类型为can_msgs/Frame的数据
原理解释:
Published Topics
received_messages (can_msgs/Frame)
将监听到的sent_messages话题,消息类型为can_msgs/Frame的数据发送到can总线上(以便stm32的can回调函数接收can数据)
2)测试的ros-python包
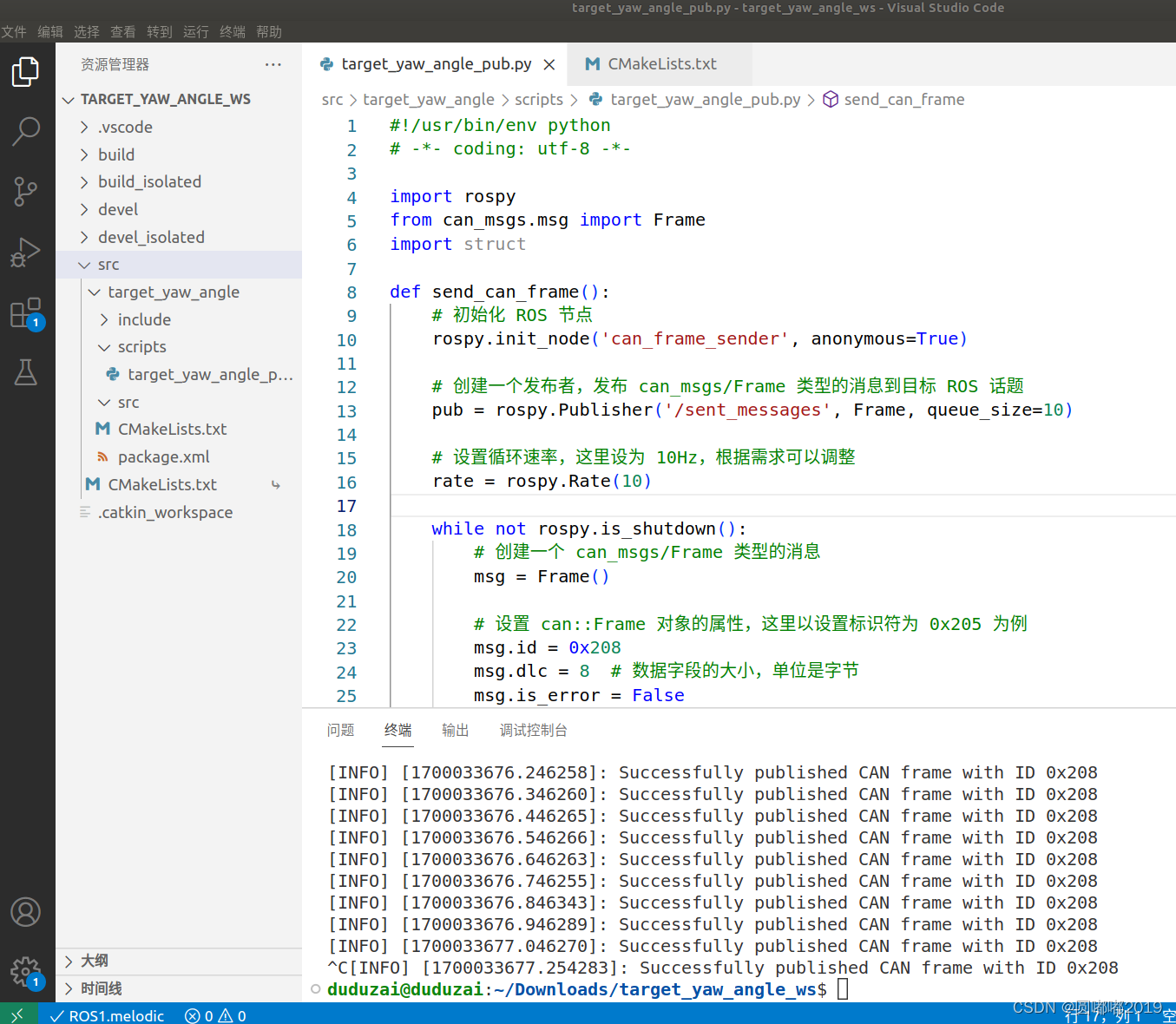
写一个python包。发布话题为sent_messages,消息类型为can_msgs/Frame的数据
注意标识符要和stm32的一样,这里都是设置成0x208
msg.id = 0x208
msg.dlc = 8 # 数据字段的大小,单位是字节
msg.is_error = False
msg.is_rtr = False
msg.is_extended = False
再到stm32中的can回调函数解析这里的数据
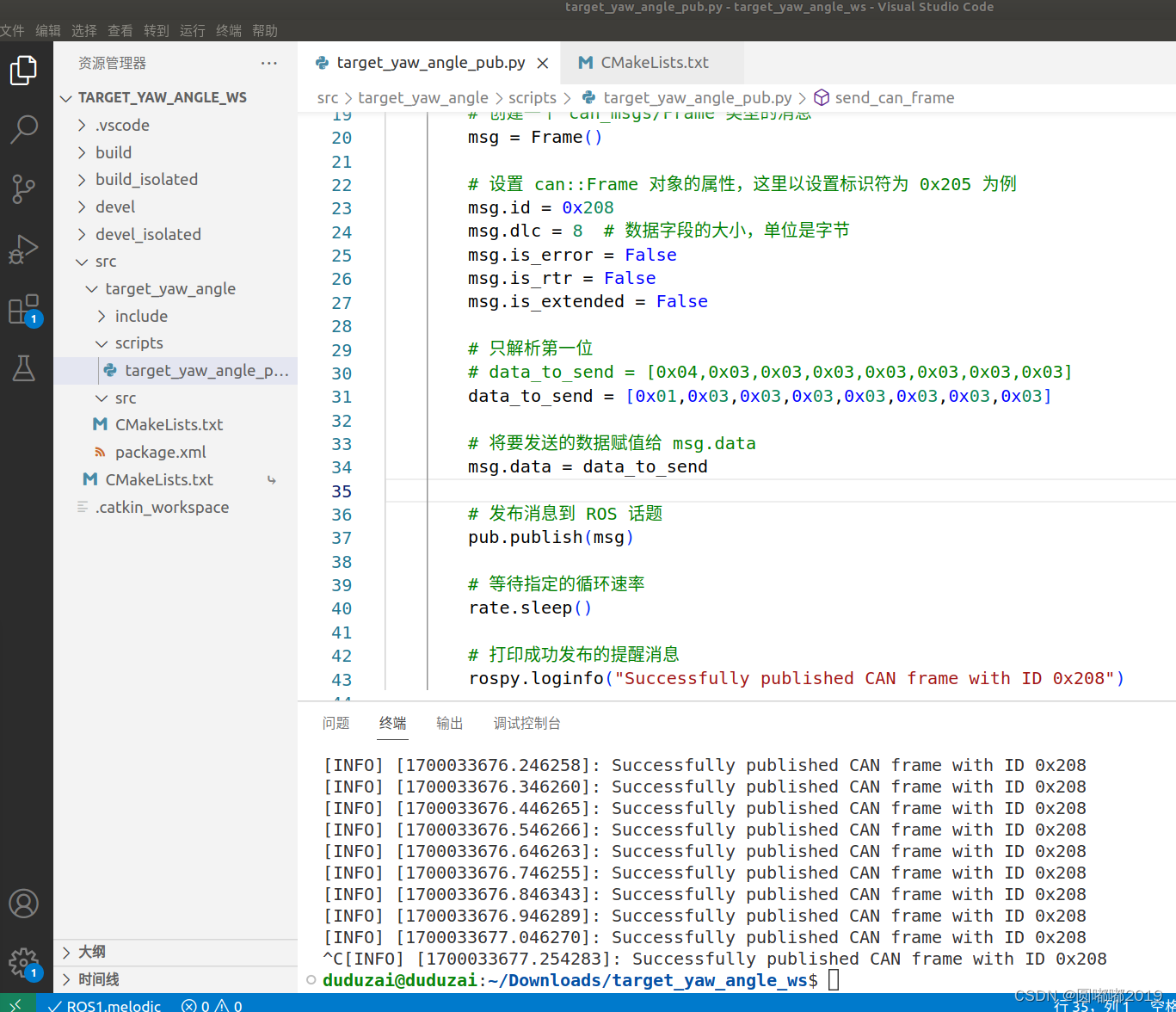
data_to_send = [0x01,0x03,0x03,0x03,0x03,0x03,0x03,0x03]
如果要获取第一个数据,就data[0]这样,就可以得到0x01的值,也就算十进制的1, 我这里只是解析一位来控制电机转动
详细代码:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from can_msgs.msg import Frame
import struct
def send_can_frame():
# 初始化 ROS 节点
rospy.init_node('can_frame_sender', anonymous=True)
# 创建一个发布者,发布 can_msgs/Frame 类型的消息到目标 ROS 话题
pub = rospy.Publisher('/sent_messages', Frame, queue_size=10)
# 设置循环速率,这里设为 10Hz,根据需求可以调整
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 创建一个 can_msgs/Frame 类型的消息
msg = Frame()
# 设置 can::Frame 对象的属性,这里以设置标识符为 0x205 为例
msg.id = 0x208
msg.dlc = 8 # 数据字段的大小,单位是字节
msg.is_error = False
msg.is_rtr = False
msg.is_extended = False
# 只解析第一位
# data_to_send = [0x04,0x03,0x03,0x03,0x03,0x03,0x03,0x03]
data_to_send = [0x01,0x03,0x03,0x03,0x03,0x03,0x03,0x03]
# 将要发送的数据赋值给 msg.data
msg.data = data_to_send
# 发布消息到 ROS 话题
pub.publish(msg)
# 等待指定的循环速率
rate.sleep()
# 打印成功发布的提醒消息
rospy.loginfo("Successfully published CAN frame with ID 0x208")
if __name__ == '__main__':
try:
send_can_frame()
except rospy.ROSInterruptException:
pass

3)keil5中数据解析
rx_data[0]解析得是ros发布得数据 data_to_send = [0x01,0x03,0x03,0x03,0x03,0x03,0x03,0x03],也就是得到十进制得0x01,代表数字1。
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
// 定义CAN消息的头部和数据
CAN_RxHeaderTypeDef rx_header;
uint8_t rx_data[8];
// 检查CAN总线实例是否为CAN1
if (hcan->Instance == CAN1)
{
// 获取CAN消息的头部信息和数据
HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &rx_header, rx_data); // rx_data接收CAN总线上发送来的数据,不同的位代表不同的信息
// 根据接收到的消息的标准帧ID执行相应的处理
switch (rx_header.StdId) //如果接收的rx_header.StdId值等于0x205,则接收can发送过来的数据。可以设置ros发送的can标识符为为0x208 (ros如何发送信息到can中)
{
case 0x205: // 如果标准帧ID为0x205
{
// 解析接收到的数据,并存储到相应的数据结构中
motor_yaw_info.rotor_angle = ((rx_data[0] << 8) | rx_data[1]);
motor_yaw_info.rotor_speed = ((rx_data[2] << 8) | rx_data[3]);
motor_yaw_info.torque_current = ((rx_data[4] << 8) | rx_data[5]);
motor_yaw_info.temp = rx_data[6];
break;
}
case 0x208:
{
// 处理接收到的 target_yaw_angle 数据
uint8_t received_target_yaw_angle = rx_data[0]; // 假设 target_yaw_angle 在数据的第一个字节
// 在这里添加处理 received_target_yaw_angle 的代码
target_yaw_angle = received_target_yaw_angle;
break;
}
}
}
}
4)USB-CAN连接
# 安装gs_usb 内核模块
sudo modprobe gs_usb
# 插入USB-CAN后执行下面步骤:
查看can设备
ifconfig -a
# 设置波特率100M(can设备参数)-和stm32cubemx can配置的波特率一样
sudo ip link set can0 up type can bitrate 1000000
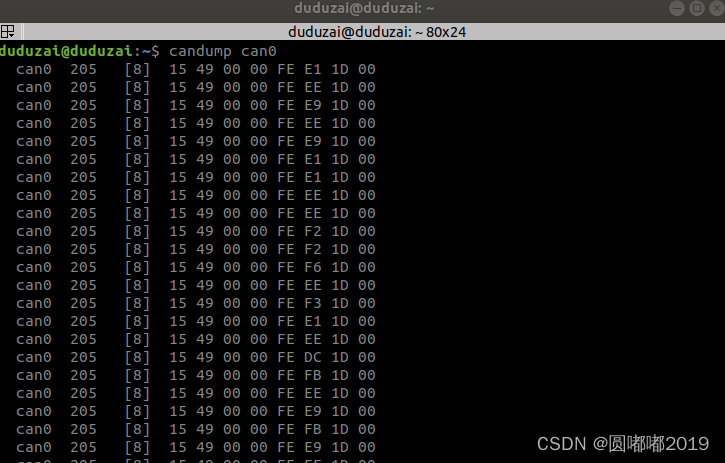
捕捉can信号
candump can0

5)启动指令
#启动socketcan_bridge_node.cpp节点
roscore
duduzai@duduzai:~/Downloads/ros_can_ws$ source ./devel/setup.bash
duduzai@duduzai:~/Downloads/ros_can_ws$ rosrun socketcan_bridge socketcan_bridge_node
#启动python包
duduzai@duduzai:~/Downloads/target_yaw_angle_ws/src/target_yaw_angle/scripts$ chmod +x target_yaw_angle_pub.py
duduzai@duduzai:~/Downloads/target_yaw_angle_ws$ source ./devel/setup.bash
duduzai@duduzai:~/Downloads/target_yaw_angle_ws$ rosrun target_yaw_angle target_yaw_angle_pub.py