Q learning算法
代码仓库:https://github.com/daiyizheng/DL/tree/master/09-rl
Q Learning是强化学习算法中的一个经典算法。在一个决策过程中,我们不知道完整的计算模型,所以需要我们去不停的尝试。
算法流程
整体流程如下:
- Q-table 初始化 第一步是创建 Q-table,作为跟踪每个状态下的每个动作和相关进度的地方
- Observation. 代理需要观察环境的当前状态
- Action.智能体选择在环境中行动。动作完成后,模型会观察该动作是否对环境有益。
- Update.采取行动后,用结果更新 Q-table
- Repeat 重复步骤 2-4,直到模型达到预期目标的终止状态。
数学公式
Q
(
s
,
a
)
=
Q
(
s
,
a
)
+
α
∗
(
r
+
γ
∗
m
a
x
(
Q
(
s
’
,
a
’
)
)
−
Q
(
s
,
a
)
)
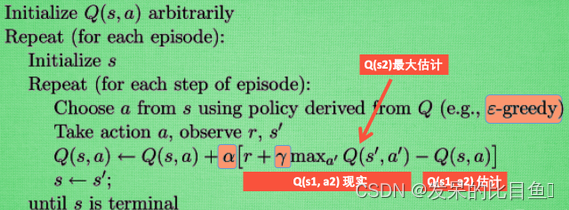
Q(s,a) = Q(s,a) + α * (r + γ * max(Q(s’,a’)) - Q(s,a))
Q(s,a)=Q(s,a)+α∗(r+γ∗max(Q(s’,a’))−Q(s,a))
该等式分解如下:
- Q(s, a) 表示在状态 s 中采取行动 a 的预期奖励。
- 该动作收到的实际奖励由 r 引用,而 s’ 指的是下一个状态。
- 学习率是 α,γ 是折扣因子。
- 状态 s’ 中所有可能的动作 a’ 的最高预期奖励由 max(Q(s’, a’)) 表示。
代码
基于表格的简单价值学习
- 构建环境
import gym
#定义环境
class MyWrapper(gym.Wrapper):
def __init__(self):
#is_slippery控制会不会滑
env = gym.make('FrozenLake-v1',
render_mode='rgb_array',
is_slippery=False)
super().__init__(env)
self.env = env
def reset(self):
state, _ = self.env.reset()
return state
def step(self, action):
state, reward, terminated, truncated, info = self.env.step(action)
over = terminated or truncated
#走一步扣一份,逼迫机器人尽快结束游戏
if not over:
reward = -1
#掉坑扣100分
if over and reward == 0:
reward = -100
return state, reward, over
#打印游戏图像
def show(self):
from matplotlib import pyplot as plt
plt.figure(figsize=(3, 3))
plt.imshow(self.env.render())
plt.show()
env = MyWrapper()
env.reset()
env.show()
- 构建Q 表
import numpy as np
#初始化Q表,定义了每个状态下每个动作的价值
Q = np.zeros((16, 4))
Q
- 记录数据
from IPython import display
import random
#玩一局游戏并记录数据
def play(show=False):
data = []
reward_sum = 0
state = env.reset()
over = False
while not over:
action = Q[state].argmax()
if random.random() < 0.1:
action = env.action_space.sample()
next_state, reward, over = env.step(action)
data.append((state, action, reward, next_state, over))
reward_sum += reward
state = next_state
if show:
display.clear_output(wait=True)
env.show()
return data, reward_sum
play()[-1]
#数据池
class Pool:
def __init__(self):
self.pool = []
def __len__(self):
return len(self.pool)
def __getitem__(self, i):
return self.pool[i]
#更新动作池
def update(self):
#每次更新不少于N条新数据
old_len = len(self.pool)
while len(pool) - old_len < 200:
self.pool.extend(play()[0])
#只保留最新的N条数据
self.pool = self.pool[-1_0000:]
#获取一批数据样本
def sample(self):
return random.choice(self.pool)
pool = Pool()
pool.update()
len(pool), pool[0]
- 训练
#训练
'''
Brain of the agent 探索者的大脑!
agent will make desicion here 用于做决策
Q(s,a) <- Q(s,a) + Alpha * [r + gamma * max(Q(s', a')) - Q(s,a)]
下面是Q——table表: (状态:行,行为:列)
up down left right
state1
state2
.
.
.
'''
def train():
#共更新N轮数据
for epoch in range(1000):
pool.update()
#每次更新数据后,训练N次
for i in range(200):
#随机抽一条数据
state, action, reward, next_state, over = pool.sample()
#Q矩阵当前估计的state下action的价值
value = Q[state, action]
#实际玩了之后得到的reward+下一个状态的价值*0.9
target = reward + Q[next_state].max() * 0.9
#value和target应该是相等的,说明Q矩阵的评估准确
#如果有误差,则应该以target为准更新Q表,修正它的偏差
#这就是TD误差,指评估值之间的偏差,以实际成分高的评估为准进行修正
update = (target - value) * 0.1
#更新Q表
Q[state, action] += update
if epoch % 100 == 0:
print(epoch, len(pool), play()[-1])
train()