STM32G47x 单片机FDCAN作为普通CAN外设使用教程
控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用途延伸到其他自动化和工业应用。CAN协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。
硬件说明
这里使用的是STM32G473VET6主控芯片,具有三个CANFD外设,这些CAN外设同时支持传统CAN通信协议。
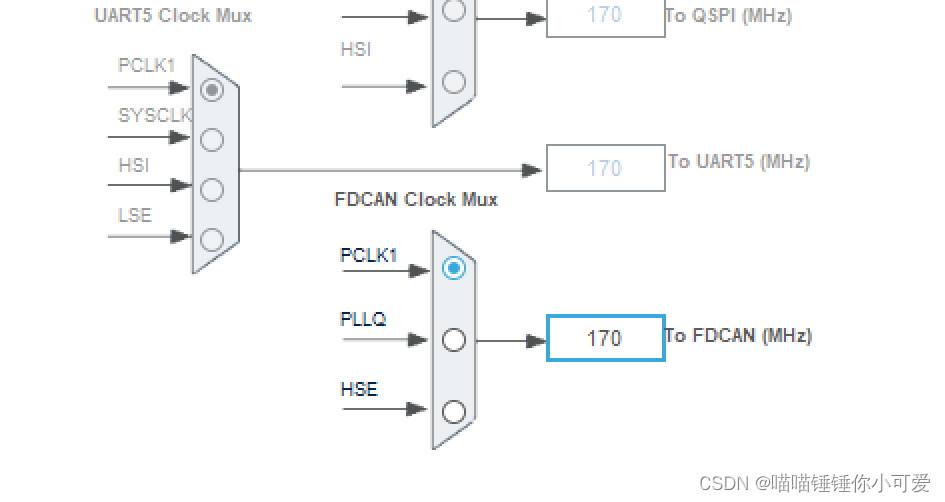
时钟配置情况
这里STM32主控的SYSCLK(系统时钟)为170MHz。使用外部晶振作为时钟源头。

CANFD外设作为普通CAN外设使用
CANFD外设
FDCAN外设子系统由一个CAN模块、一块共享的消息RAM和一个配置模块组成。可以参阅内存映射,以获取这些部分的基址。
这些模块(FDCAN)符合ISO 11898-1:2015(CAN协议规范版本2.0部分A、B)和CAN FD协议规范版本1.0。
每个FDCAN实例有0.8千字节的消息RAM,用于实现过滤器、接收FIFOs、传输事件FIFOs和传输FIFOs。
- 符合CAN协议版本2.0部分A、B和ISO 11898-1:2015、-4
- 支持最大64数据字节的CAN FD
- 具有CAN错误日志
- 支持AUTOSAR和J1939
- 具有改进的接收过滤器
- 具有两个接收FIFO,每个有三个有效载荷(每个有效载荷最多64字节)
- 具有高优先级消息接收时的单独信号提示
- 具有可配置的传输FIFO/队列,三个有效载荷(每个有效载荷最多64字节)
- 具有传输事件FIFO
- 具有可编程的环回测试模式
- 具有可屏蔽的模块中断
- 具有两个时钟域:APB总线接口和CAN核心内核时钟
- 具有支持断电
CANFD 通信速率计算
前置知识:
要计算CAN的通信速率首先都了解CAN通信过程中每个bit的构成。
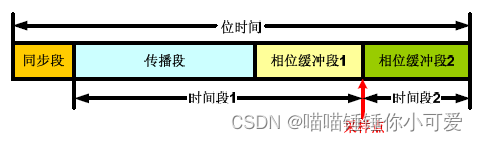
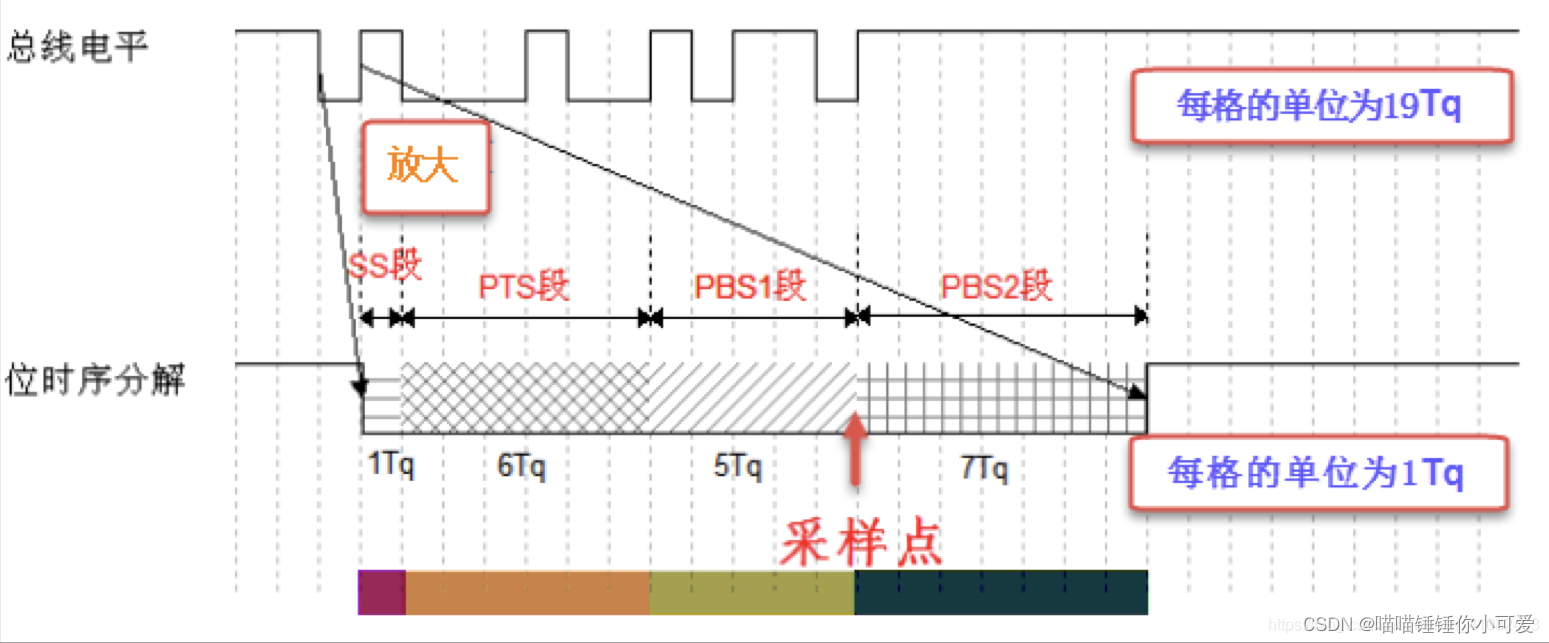
一个电平位时间主要有以下4个段:
SS段(SYNC SEG;同步段):若通讯节点检测到总线上信号的跳变沿被包含在SS段的范围内,则表示节点与总线的时序是同步的;(固定1个Tq)
PTS段(PROP SEG;传播段):这个时间段是用于补偿网络的物理延时时间,是总线上输入比较器延时和输出驱动器延时综合的两倍;(长度可编程:1~8个Tq)
PBS1段(PHASE SEG1;相位缓冲段1):用于补偿节点间的晶振误差,允许通过重同步对该段加长,在这个时间段末端进行总线状态的采样;(长度可编程:1~8Tq)
协议层-位时序
意义:为了实现正确的总线电平采样,确保通讯正常。最小单位是Tq(Time Quantum),一个完整位由8~25个Tq组成,其中一个电平位时间主要有以下4个段:
段名 意义 作用 SS(1Tq) Sync Seg;同步段 若通讯节点检测到总线上信号的跳变沿被包含在SS段的范围内,则表示节点与总线的时序是同步的;(固定1个Tq) PTS(1-8Tq) Prob Seg;传播段 这个时间段是用于补偿网络的物理延时时间,,是传播时间、收发器延时之和的两倍 PBS1(1-8Tq) Phase Seg1;相位缓冲段1 补偿变压阶段误差 PBS2(2-8Tq) Phase Seg2;相位缓冲段2 补偿边沿阶段误差 SJW(1-4Tq) 再同步补偿宽度 补偿时钟频率偏差、传输延迟等 \begin{array}{|c|c|c|} \hline \text { 段名 } & \text { 意义 } & \text { 作用 } \\ \hline \text { SS(1Tq) } & \text { Sync Seg;同步段} & \text { 若通讯节点检测到总线上信号的跳变沿被包含在SS段的范围内,则表示节点与总线的时序是同步的;(固定1个Tq) } \\ \hline \text { PTS(1-8Tq) } & \text { Prob Seg;传播段 } & \text { 这个时间段是用于补偿网络的物理延时时间,,是传播时间、收发器延时之和的两倍 } \\ \hline \text { PBS1(1-8Tq) } & \text { Phase Seg1;相位缓冲段1} & \text { 补偿变压阶段误差 } \\ \hline \text { PBS2(2-8Tq) } & \text { Phase Seg2;相位缓冲段2} & \text { 补偿边沿阶段误差 } \\ \hline \text { SJW(1-4Tq) } & \text { 再同步补偿宽度 } & \text { 补偿时钟频率偏差、传输延迟等 } \\ \hline \end{array} 段名 SS(1Tq) PTS(1-8Tq) PBS1(1-8Tq) PBS2(2-8Tq) SJW(1-4Tq) 意义 Sync Seg;同步段 Prob Seg;传播段 Phase Seg1;相位缓冲段1 Phase Seg2;相位缓冲段2 再同步补偿宽度 作用 若通讯节点检测到总线上信号的跳变沿被包含在SS段的范围内,则表示节点与总线的时序是同步的;(固定1个Tq) 这个时间段是用于补偿网络的物理延时时间,,是传播时间、收发器延时之和的两倍 补偿变压阶段误差 补偿边沿阶段误差 补偿时钟频率偏差、传输延迟等

如下图所示:
C
A
N
波特率
=
1
1
b
i
t
所占用时间
=
1
T
q
∗
1
b
i
t
的
T
q
个数
CAN波特率 = \frac{1}{1bit所占用时间} = \frac{1}{Tq*1bit的Tq个数}
CAN波特率=1bit所占用时间1=Tq∗1bit的Tq个数1

上面已经说明了一个数据位(1bit,准确来说是1baud)占**(SS+PTS+PBS1+PBS2+SJW)**个Tq。
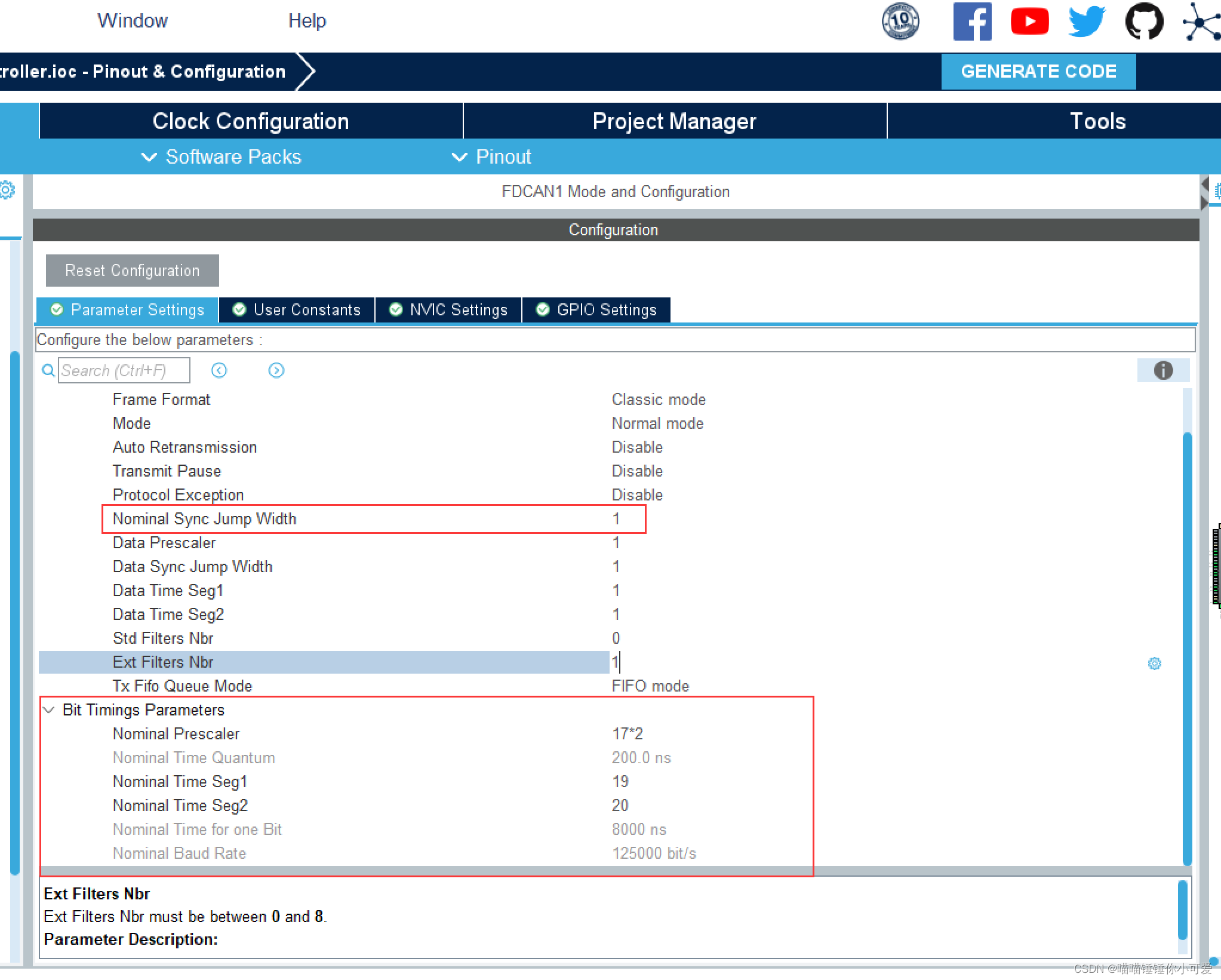
STM32CubeMX界面参数
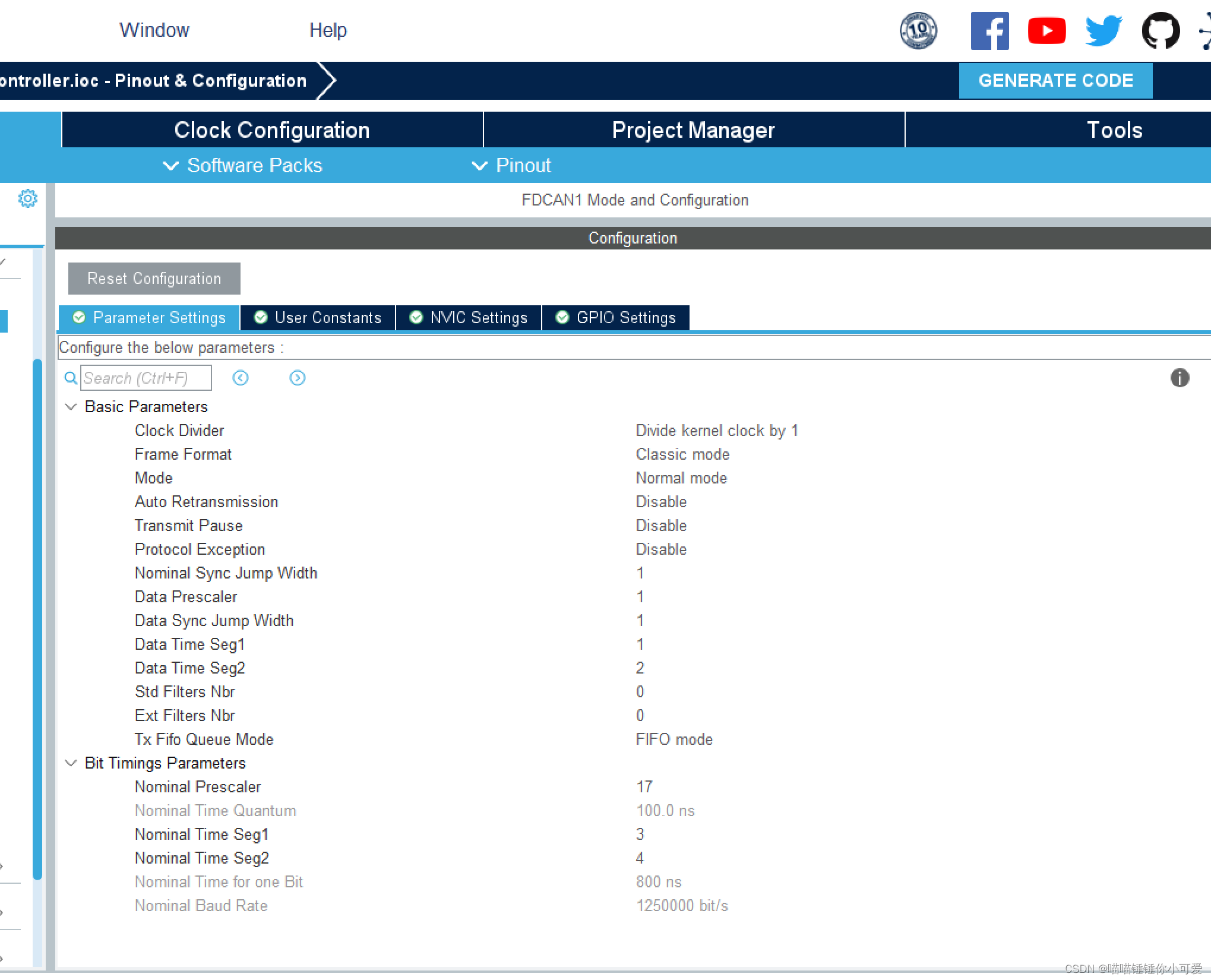
分别为(Nominal 我不知道为什么是Nominal 这个词,但是如果是CAN FD模式的话,这里NominalPrescaler、NominalSyncJumpWidth 、NominalTimeSeg1 、NominalTimeSeg2 是用于配置仲裁阶段波特率的,DataPrescaler 、DataSyncJumpWidth 、DataTimeSeg1 、DataTimeSeg2 是用于配置数据阶段波特率的。):
-
Basic Parameters:
Clock Divider: CAN内核时钟分频系数。Frame Format: 指定CAN帧格式,这里是经典CAN(CAN2.0 B)、FD模式没有比特率切换、FD模式有比特率切换。Mode: 指定CAN控制器的工作模式,如正常模式、环回模式或静默模式。Auto Retransmission: 是否使能自动重发。Transmit Pause: 是否配置禁止传输暂停特性。Protocol Exception: 协议异常处理使能。Nominal Sync Jump Width: 规定名义重同步跳跃宽度,用于时间同步,,即位时序提到的SJW。用于动态调节 Phase_Seg1和 Phase_Seg1,所以不可以比Phase_Seg1和 Phase_Seg1大.Data Prescaler: 数据速率预分频值。CAN时钟分配设置,一般设置为1即可,全部由PLL配置好,tq = NominalPrescaler x (1/ fdcan_ker_ck),范围1-32。Data Sync Jump Width: 数据阶段的同步跳跃宽度。用于动态调节 Phase_Seg1和 Phase_Seg1,所以不可以比Phase_Seg1和 Phase_Seg1大,范围1-16Data Time Seg1: 数据位时间段1的长度。特别注意这里的Seg1,这里是两个参数之和,对应位时间特性图的 Pro_Seg + Phase_Seg1。Data Time Seg2: 数据位时间段2的长度。对应位时间特性图的 Phase_Seg2。(Pro_Seg + Phase_Seg1 = DataTimeSeg1, Phase_Seg2 = DataTimeSeg2)Std Filters Nbr: 设置标准ID过滤器个数,范围0-128。是配置CAN接受时候使用的滤波器数量,用了多少个就写多少个。Ext Filters Nbr: 设置扩展ID过滤器个数,范围0-64。Tx Fifo Queue Mode: 发送FIFO队列模式。
-
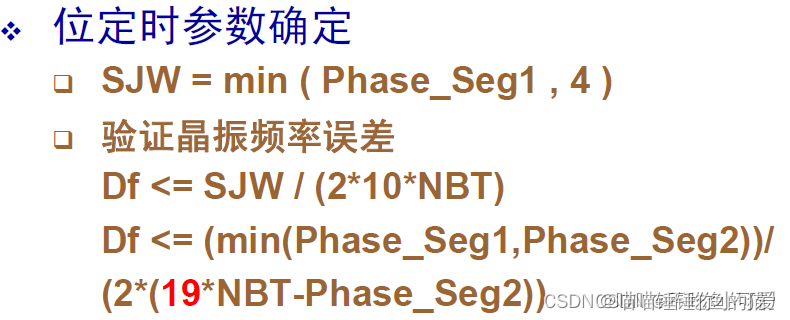
Bit Timings Parameters 位定时参数:
Nominal Prescaler: 名义速率预分频器值。CAN时钟分配设置,一般设置为1即可,全部由PLL配置好,tq = NominalPrescaler x (1/ fdcan_ker_ck)。Nominal Time Quantum: 名义时间量子的长度。Nominal Time Seg1: 名义位时间段1的长度。用于动态调节 Phase_Seg1和 Phase_Seg1,所以不可以比Phase_Seg1和 Phase_Seg1大。Nominal Time Seg2: 名义位时间段2的长度。特别注意这里的Seg1,这里是两个参数之和,对应位时间特性图的 Pro_Seg + Phase_Seg1.(Pro_Seg + Phase_Seg1 = NominalTimeSeg1, Phase_Seg2 = NominalTimeSeg2)Nominal Time for one Bit: 名义单比特时间。Nominal Baud Rate: 名义波特率。
一般没有配置SJW,且STM32的CAN外设的Sync_Seg是固定值1,并且有:
CAN 波特率 = CAN Freq / (Sync_Seg + Pro_Seg + Phase_Seg1 + Phase_Seg2)
关于滤波器数量:
在CAN协议里,报文的标识符不代表节点的地址,而是跟报文的内容相关的。因此,发送者以广播的形式把报文发送给所有的接收者。节点在接收报文时,根据标识符(CAN ID)的值决定软件是否需要该报文;如果需要,就拷贝到SRAM里;如果不需要,报文就被丢弃且无需软件的干预。
为满足这一需求,bxCAN为应用程序提供了14个位宽可变的、可配置的过滤器组(13~0),以便只接收那些软件需要的报文。硬件过滤的做法节省了CPU开销,否则就必须由软件过滤从而占用一定的CPU开销。每个过滤器组x由2个32位寄存器,CAN_FxR0和CAN_FxR1组成。
在这个案例中CAN模块的时钟源为PCLK1,为170MHz。
如下图是在CAN使用上图的时钟源的情况下配置125Kbps的波特率,配置为传统CAN模式的情况,作为传统CAN模式,参数DataPrescaler 、DataSyncJumpWidth 、DataTimeSeg1 、DataTimeSeg2没有作用。
测试代码
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_FDCAN1_Init();
/* USER CODE BEGIN 2 */
HAL_FDCAN_Start(&hfdcan1);
//CAN2.0B 拓展帧消息发送
FDCAN_TxHeaderTypeDef TxHeader;
uint8_t TxData[8];
TxHeader.Identifier = 0x321;
TxHeader.IdType = FDCAN_EXTENDED_ID;
TxHeader.TxFrameType = FDCAN_DATA_FRAME;
TxHeader.DataLength = FDCAN_DLC_BYTES_8;
TxHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE;
TxHeader.BitRateSwitch = FDCAN_BRS_OFF;
TxHeader.FDFormat = FDCAN_CLASSIC_CAN;
TxHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;
TxHeader.MessageMarker = 0;
TxData[0] = 0x00;
TxData[1] = 0x01;
TxData[2] = 0x02;
TxData[3] = 0x03;
TxData[4] = 0x04;
TxData[5] = 0x05;
TxData[6] = 0x06;
TxData[7] = 0x07;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_Delay(200);
if (HAL_FDCAN_GetTxFifoFreeLevel(&hfdcan1) > 0)
{
if (HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan1, &TxHeader, TxData) != HAL_OK)
{
Error_Handler();
}
}
}
/* USER CODE END 3 */
}
运行结果:

如图为CANH对CANL的波形,发送端接了120欧姆的终端电阻,接收测悬空,在接收测测量。(主要是我还没有看到为什么不接CAN隔离芯片或者没有给CAN隔离芯片上电的情况下测不到发送出来的波形。)