(业余)PID即比例+积分+微分,它将给定值r(t)与实际输出值y(t)的偏差的比例(P)、积分(I)、微分(D)通过线性组合形成控制量,对被控对象进行控制。我们先用matlab Silink弄一个简易的PID例子:
 中间三条就是比例,积分,微分,右边的1/(s+1)就是你的执行机构,执行机构后面有个延迟,这里设定为100,最后是一个示波器,用来观察输出。
中间三条就是比例,积分,微分,右边的1/(s+1)就是你的执行机构,执行机构后面有个延迟,这里设定为100,最后是一个示波器,用来观察输出。
接下来我们随便输入一个执行函数,来对它进行调参。这里就拿![]()
做一个简单例子
首先,把权重都调0,第一项权重调为1,停止时间5000。先运行示波器试试水。我们观察到如下结果:
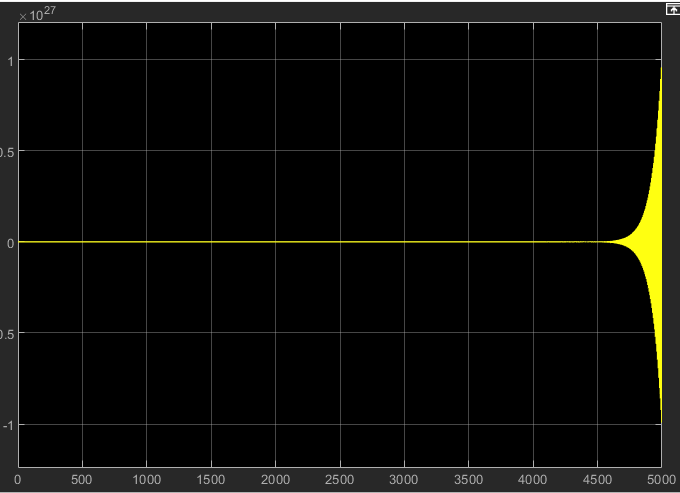
结果发散,说明数值大了,调小至0.3,可以观察到发散有所减弱,继续调小,结果会逐渐收敛,我们选择0.12继续接下来的处理,这时候我们发现它收敛不在1,我们可以使用第二个参数来抬高收敛值。


第二个参数重复上述流程,如果选的过大比如0.1,就会发散,如果选的过小,比如0.0001它到达1的速度就会变慢,如图,如果偏大,他就会有一个小峰如0.01,0.0068是一个相对较好的结果

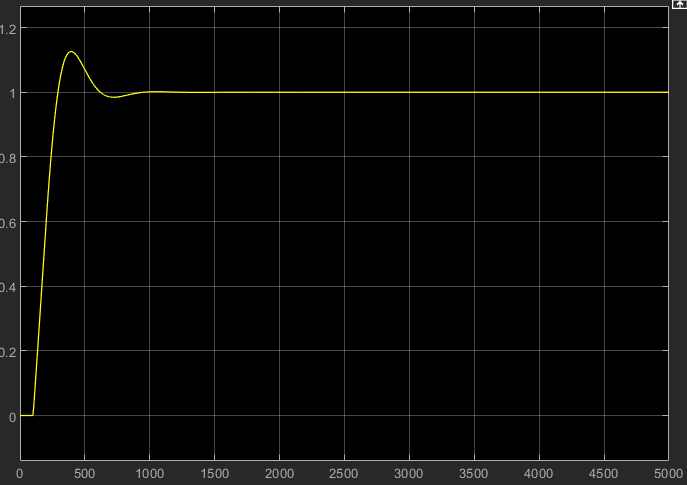

而第三个参数,是当前两个参数完毕之后,图像有一些震颤,可以用来平滑曲线。
至此,该PID调试完成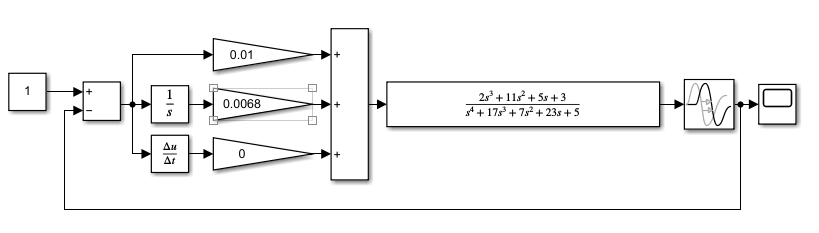
Silink 自带的PID控件有自动调参功能,可以尝试使用。