网格变形
- 需求分析
- 技术分析
需求分析
根据几何模型上的几个特征点,对几何模型进行变形。比如

技术分析
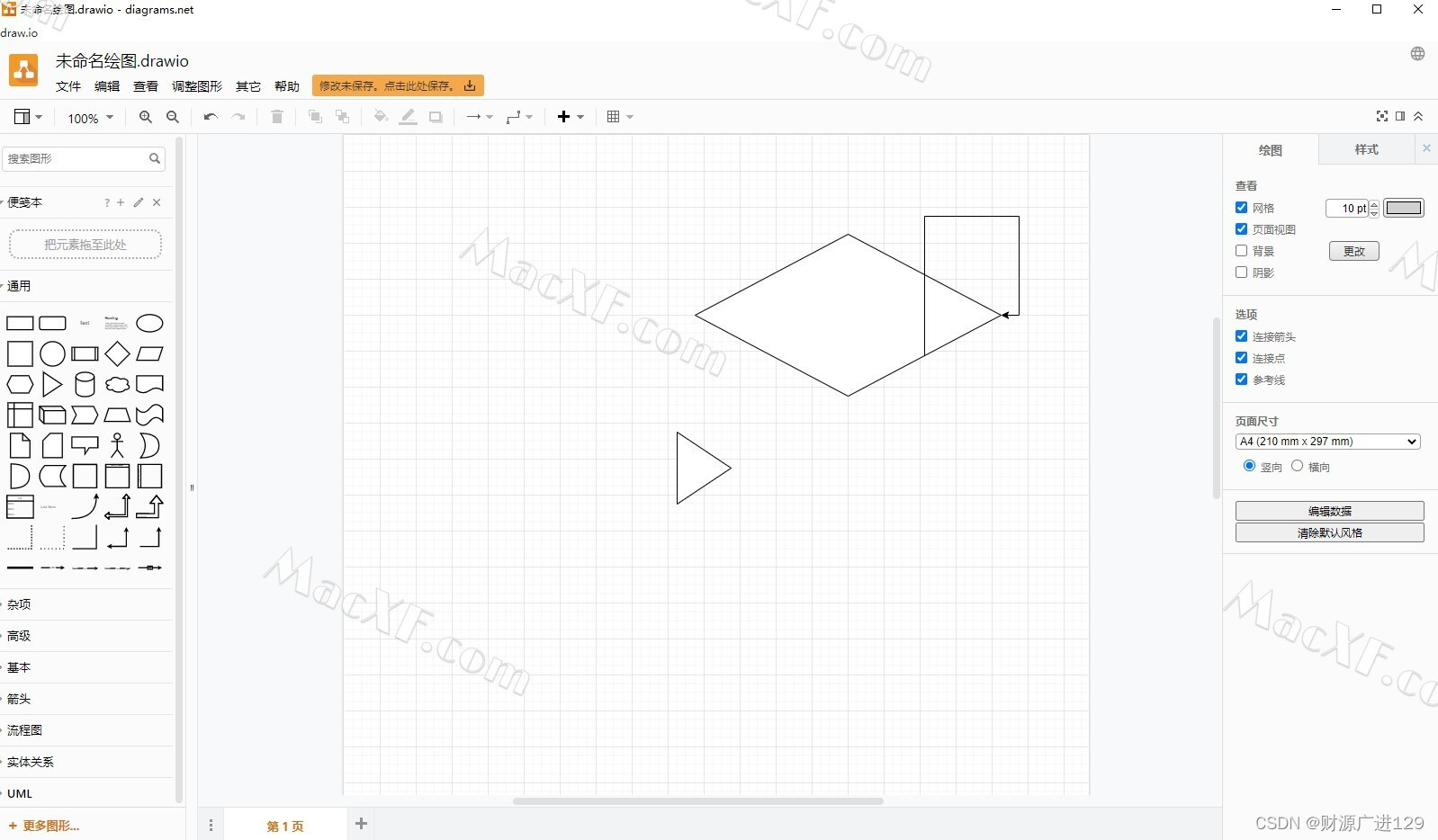
把几何模型使用三角面片表示,然后通过网格映射变形进行实现。关于网格这块有本经典的书可以参考,《ploygon mesh processing》。上面那个模型看着比较复杂,现在使用比较简单的模型来讲解一种映射方法。

如上图,为2D模型,左图为原始模型,
P
1
\mathbf{P} _1
P1 ,
P
2
\mathbf{P} _2
P2 ,
P
3
\mathbf{P} _3
P3 ,
P
o
\mathbf{P} _o
Po 坐标已知,右图为变形后模型,其中
P
11
\mathbf{P} _{11}
P11 ,
P
12
\mathbf{P} _{12}
P12 ,
P
13
\mathbf{P} _{13}
P13 坐标已知,求
P
1
o
\mathbf{P} _{1o}
P1o 的坐标。将
P
1
o
\mathbf{P} _{1o}
P1o的坐标表示成
P
11
\mathbf{P} _{11}
P11 ,
P
12
\mathbf{P} _{12}
P12 ,
P
13
\mathbf{P} _{13}
P13 的线性组合,比如
P
o
=
k
1
P
1
+
k
2
P
2
+
k
3
P
3
\mathbf{P} _{o} = k_1\mathbf{P} _1 + k_2\mathbf{P} _2+k_3\mathbf{P} _3
Po=k1P1+k2P2+k3P3 ,因为是映射嘛,这里使用同样的系数
k
\mathbf{k}
k ,即
P
1
o
=
k
1
P
11
+
k
2
P
12
+
k
3
P
13
\mathbf{P} _{1o} = k_1\mathbf{P} _{11} + k_2\mathbf{P} _{12}+k_3\mathbf{P} _{13}
P1o=k1P11+k2P12+k3P13 写成坐标的矩阵形式
[
P
1
x
P
2
x
P
3
x
P
1
y
P
2
y
P
3
y
]
[
k
1
k
2
k
3
]
=
[
P
o
x
P
o
y
]
(
1
)
\begin{bmatrix} P_{1x}&P_{2x}&P_{3x}\\ P_{1y}&P_{2y}&P_{3y} \end{bmatrix} \begin{bmatrix} k_{1}\\ k_{2}\\ k_{3} \end{bmatrix} =\begin{bmatrix} P_{ox}\\ P_{oy} \end{bmatrix} (1)
[P1xP1yP2xP2yP3xP3y]
k1k2k3
=[PoxPoy](1)
和
[
P
11
x
P
12
x
P
13
x
P
11
y
P
12
y
P
13
y
]
[
k
1
k
2
k
3
]
=
[
P
1
o
x
P
1
o
y
]
(
2
)
\begin{bmatrix} P_{11x}&P_{12x}&P_{13x}\\ P_{11y}&P_{12y}&P_{13y} \end{bmatrix} \begin{bmatrix} k_{1}\\ k_{2}\\ k_{3} \end{bmatrix} =\begin{bmatrix} P_{1ox}\\ P_{1oy} \end{bmatrix} (2)
[P11xP11yP12xP12yP13xP13y]
k1k2k3
=[P1oxP1oy](2)
如果能从(1)式中求出
k
1
{k} _{1}
k1,
k
2
{k} _{2}
k2 ,
k
3
{k} _{3}
k3然后带入(2)式,就可以算出待求点坐标了。至于如何从(1)式中求出
k
1
{k} _{1}
k1,
k
2
{k} _{2}
k2 ,
k
3
{k} _{3}
k3,其实是一个线性方程组求解问题,
A
m
n
X
n
=
b
A_{mn}X_{n}=b
AmnXn=b
在三维空间里,m=3(也就是xyz三个分量),有几个特征点,n就等于几。因为不是方阵无法直接求逆,可以使用伪逆矩阵进行计算,只要解出一组解的k值,就是找到了一个点映射。其他的网格点依次执行就可以了。这样算出来的网格可能会畸变比较大,或者形状不理想现象。至于畸变大可以描述为不够平滑,仍然有很多数学工具可以使用,比如拉普拉斯平滑等。

![[LeetCode]-225. 用队列实现栈](https://img-blog.csdnimg.cn/de34221d0eb844148091245e07e4b19b.png)