文章目录
- 路径规划
- 参考
路径规划
路径规划是导航的最终目标。这允许用户向机器人给出目标姿势,并让它在给定的环境中自主地从当前位置导航到目标位置。这是我们迄今为止所做的一切(地图绘制和本地化)的汇集点。ROS 导航堆栈已经为我们完成了繁重的工作,就像我们在地图绘制和本地化中看到的那样。导航的路径规划部分是在名为 move_base 的包中实现的。在我们开始使用这个包之前,了解全局并了解关键细节非常重要。
使用的 ROS 节点:move_base
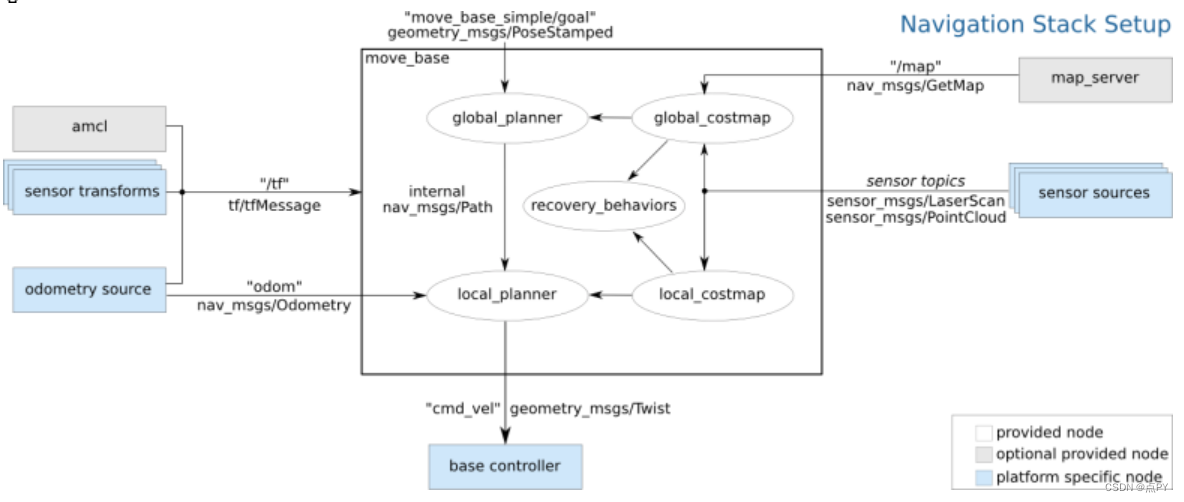
中间的大方框代表move_base节点,它是ROS导航堆栈的核心。它订阅了多个主题,包括映射部分中介绍的map_server 节点和本地化部分中介绍的amcl 节点。在 move_base 节点中,有很多事情需要在继续之前理解。
在 move_base 节点中,该图显示了四个主要项目。让我们一一了解它们。
- global_planner
- local_planner
- global_costmap
- local_costmap
Planner是一种算法,用于计算机器人从当前位置到用户提供的目标位置的路径。在 ROS 中,规划器依靠称为成本图的地图 来生成计划。稍后将解释成本图。让我们花一些时间来了解 move_base 节点中发挥作用的各种规划器。
move_base节点包括两种规划器——全局规划器和局部规划器。global_planner输出机器人从当前位置到目标位置的路径。ROS 中实现的几种不同的算法/规划器可以实现全局规划。常见的是 – carrot_planner 、 navfn 和 global_planner 。用户可以选择使用哪个 global_planner。此外,在使用任何这些全局规划器之前,用户需要配置一些参数。参数列表在此处给出。现在,对 global_planner 在宏观导航方案中的作用有了基本的了解,同样重要的是要提到 global_planner 依赖 global_costmap 来创建计划。在介绍成本图之前,我们还需要了解一下 local_planner。
local_planner还生成机器人在给定环境中移动的计划或路径。globa_planner 创建的计划将传递给 local_planner 执行。local_planner 依赖于 local_costmap 并生成一个本地计划,其中考虑了激光和里程计数据。有几个本地规划器可供使用。常见的是 – base_local_planner、dwa_local_planner、eband_local_planner、teb_local_planner。到目前为止,我们已经了解到 global_planner 和 local_planner 都依赖于代价图。让我们研究一下它们到底是什么。
ROS 中的成本图是2D 或 3D 占用网格矩阵/地图,其中每个网格或单元格都分配有 0 到 255 之间的值/成本。每个单元格中的值或成本用于由 globa_planner 和 local_planner 规划路径。这些值指示给定网格是空闲的、已占用的还是未知的。如果单元格是空闲的,则为其分配成本 0,如果单元格包含障碍物,则为其分配更高的值,例如 254。包含障碍物的单元格的成本基于以下因素膨胀(分散到)周围的单元格:用户指定的膨胀半径。请参阅本页有关“通货膨胀”的部分。要了解有关成本图的更多信息,请参阅 ROS wiki上的此页面以及此页面。这里还提供了一个简短的定义。此时,您可能想知道成本图是如何创建的?
首先,必须初始化代价图。这可以通过从本教程的映射部分中介绍的 map_server 节点提供静态地图或提供区域的固定宽度和高度来完成。ROS 导航堆栈使用两个成本图 - 一个称为global_costmap,由 global_planner 用于在整个环境上创建长期计划,第二个称为local_costmap,由 local_planner 用于创建短期计划,同时考虑到环境中的障碍物信息。我们主要使用静态映射来初始化global_costmap。请注意,为了使用用户提供的静态地图(通过map_server节点)初始化costmap,它必须与amcl节点结合使用,以便可以在地图框中注册障碍物信息。最后,我们通过给 local_costmap 一个固定的宽度和高度来初始化它。初始化后,当机器人在环境中移动时,local_costmap 会根据传感器数据进行更新。因此,如果在创建静态地图后将新对象/障碍物添加到环境中,它们将显示在 local_costmap 中,但不会显示在 global_costmap 中。
总结上面提出的概念, move_base 节点包含两个规划器 - 全局规划器依赖于基于 global_costmap 生成全局规划,而 local_planner 依赖于 local_costmap 来生成局部规划。简而言之,近距离路径规划的优化由local_planner完成,全路径由global_planner优化。这两个规划器和他们的成本图一起工作,为机器人创建一条路径,通过避开障碍物将其从一个点带到另一个点。
这就是 move_base 节点的概念部分。接下来,我们将开始使用它来使机器人在环境中自主移动。然而,我们需要首先满足先决条件,就像我们在地图绘制和本地化中所做的那样。
参考
https://prabhjotkaurgosal.com/a-guide-to-implementing-ros-navigation-stack-on-your-robot/4/