目录
一、前言
二、点云聚类分割
三、基于方位搜索L型拟合
四、评价准则之面积最小化
五、评价准则之贴合最大化
六、评价准则之方差最小化
一、前言
对于多线束雷达可以获取目标物体更全面的面貌,在道路中前向或角雷达可能无法获取目标车矩形框但可以扫到两边或者一边,在做目标方向估计时这些信息至关重要。看到一篇文章不错的思路,拿来记录借鉴下。
整体算法:
Step1: 将距离点按照预先设定的距离阈值进行聚类划分簇
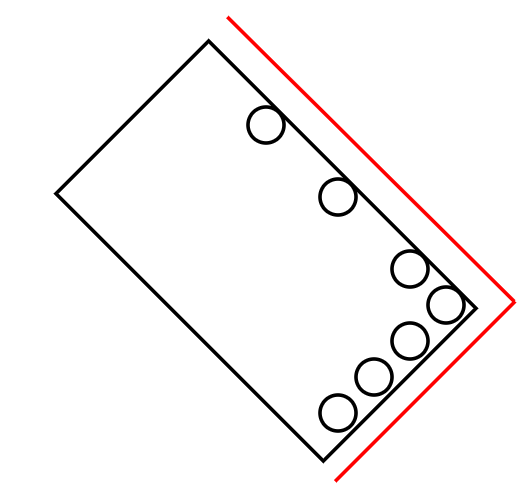
Step2:基于方位搜索+特定准则进行L型拟合,得出4边参数
2.1 矩形
目录
一、前言
二、点云聚类分割
三、基于方位搜索L型拟合
四、评价准则之面积最小化
五、评价准则之贴合最大化
六、评价准则之方差最小化
对于多线束雷达可以获取目标物体更全面的面貌,在道路中前向或角雷达可能无法获取目标车矩形框但可以扫到两边或者一边,在做目标方向估计时这些信息至关重要。看到一篇文章不错的思路,拿来记录借鉴下。
整体算法:
Step1: 将距离点按照预先设定的距离阈值进行聚类划分簇
Step2:基于方位搜索+特定准则进行L型拟合,得出4边参数
2.1 矩形
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1187293.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!