官网: 英飞凌TLF35584QVVS2
TLF35584_SPI:
- 1 Overview
- 2 Block Diagram
- 3 Pin Configuration
- 3.1 Pin Assignment - PG-VQFN-48
- 4 General Product Characteristics
- 4.1 Absolute Maximum Ratings 绝对最大额定值
- 4.2 Functional Range
- 4.3 Thermal Resistance 热阻
- 4.4 Quiescent Current Consumption
- 5 Wake Function 唤醒功能
- 5.1 Introduction
- 5.2 Electrical Characteristics Enable Signal 电气特性 使能信号
- 5.3 Electrical Characteristics Wake Signal 电气特性 唤醒信号
- 5.4 Typical Performance Characteristics 典型性能特征
- 6 Pre Regulators 预调节器
- 6.1 Introduction
- 6.2 Step Up Regulator 升压稳压器
- 6.2.1 Functional description功能描述
- 6.2.2 Electrical characteristics
- 6.3 Step Down Regulator 降压稳压器
- 6.3.1 Functional description
- 6.3.2 Electrical characteristics
- 6.3.3 Typical Performance Characteristics
- 6.4 Frequency setting 频率设定
- 6.4.1 Introduction
- 6.4.2 Electrical characteristics frequency setting
- 6.4.3 Typical Performance Characteristics
- 7 Post Regulators 后置调节器
- 7.1 Introduction
- 7.2 µ-Processor Supply µ 处理器电源 QUC
- 7.2.1 Functional description
- 7.2.2 Electrical characteristics
- 7.2.3 Typical Performance Characteristics
- 7.3 Communication Supply QCO
- 7.3.1 Functional description
- 7.3.2 Electrical characteristics
- 7.3.3 Typical Performance Characteristics
- 7.4 Voltage Reference QVR
- 7.4.1 Functional description
- 7.4.2 Electrical characteristics
- 7.4.3 Typical Performance Characteristics
- 7.5 Tracker 1 & 2 QTx
- 7.5.1 Functional description
- 7.5.2 Electrical characteristics
- 7.5.3 Typical Performance Characteristics
- 7.7 Power Sequencing
- 7.7.1 Power sequencing from POR to INIT state
- 7.7.2 Power sequencing STANDBY to INIT state
- 7.7.3 Power sequencing SLEEP to WAKE state
- 8 Monitoring Function
- 8.1 Introduction
- 8.2 Shutdown Function 关断功能
- 8.3 Reset Function 复位功能
- 8.4 Interrupt Function 中断功能
- 8.5 Electrical Characteristics Voltage Monitoring and Reset Function
- 9 Standby LDO and Internal Supplies 备用 LDO 和内部电源
- 9.1 Standby LDO:
- 9.1.1 Functional description
- 9.1.2 Electrical characteristics
- 9.1.3 Typical Performance Characteristics
- 9.2 Internal Supplies 内部电源
- 10 Wake Up Timer
- 10.1 Description
- 10.2 Electrical Characteristics
- 11 State Machine
- 11.1 Introduction
- 11.2 Description of States 状态描述
- 11.2.1 POWERDOWN-state 掉电状态
- 11.2.2 INIT-state 初始化状态
- 11.2.3 NORMAL -state 正常状态
- 11.2.4 STANDBY-state 待机状态
- 11.2.5 SLEEP-state 睡眠状态
- 11.2.6 WAKE-state 唤醒状态
- 11.2.7 FAILSAFE-state 故障安全状态
- 11.3 状态之间的转换
- 11.3.1 POWERDOWN -> INIT-state 断电 -> 初始化状态
- 11.3.2 INIT -> NORMAL 状态
- 11.3.3 NORMAL 和SLEEP 状态之间的转换
- 11.3.3.1 NORMAL -> SLEEP
- 11.3.3.2 SLEEP -> WAKE
- 11.3.3.3 WAKE -> SLEEP
- 11.3.4 Movements between NORMAL and STANDBY state 正常和待机状态之间的转换
- 11.3.4.1 NORMAL -> STANDBY
- 11.3.4.2 STANDBY -> INIT
- 11.3.4.3 INIT -> NORMAL
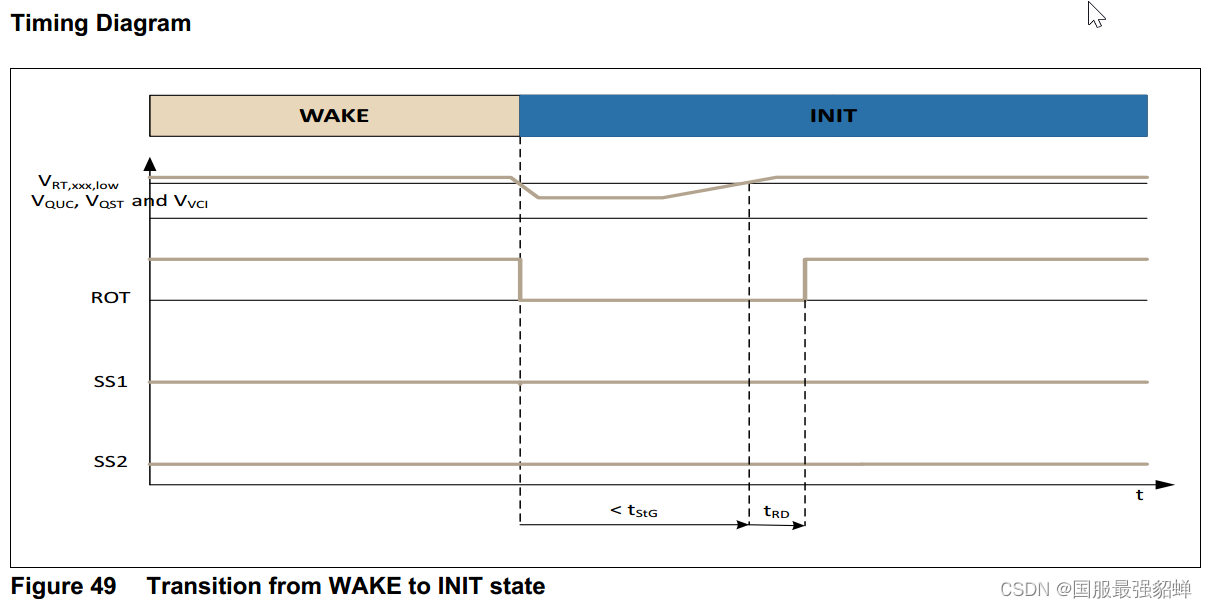
- 11.3.5 NORMAL -> WAKE
- 11.3.6 WAKE -> NORMAL
- 11.3.7 WAKE -> STANDBY
- 11.3.8 FAILSAFE -> INIT
- 11.4 Reaction on detected faults 对检测到的故障的反应
- 11.4.1 Stay in current State 保持当前状态
- 11.4.2 Transition into INIT State
- 11.4.2.1 INIT -> INIT state due to detected fault
- 11.4.2.2 NORMAL -> INIT state due to detected fault
- 11.4.2.3 STANDBY -> INIT state due to detected fault
- 11.4.2.4 SLEEP -> INIT state due to detected fault
- 11.4.2.5 WAKE -> INIT state due to detected fault
- 11.4.3 Transition into FAILSAFE State
- 11.4.3.1 INIT -> FAILSAFE state due to detected fault
- 11.4.3.2 XXXX -> INIT -> FAILSAFE state due to detected fault
- 11.4.3.3 NORMAL -> FAILSAFE state due to detected fault
- 11.4.3.4 STANDBY -> FAILSAFE state due to detected fault
- 11.4.3.5 SLEEP -> FAILSAFE state due to Fault
- 11.4.3.6 WAKE -> FAILSAFE state due to detected fault
- 11.4.3.7 Transition into FAILSAFE state due to thermal shutdown
- 11.4.4 Transition into POWERDOWN-state
- 11.5 Electrical Characteristics
- 11.6 (略) Built In Self Test (BIST) Features 内置自测试 (BIST) 功能
- 11.7 Microcontroller Programming Support
- 12 Safe State Control Function 安全状态控制功能
- 12.1 Introduction
- 12.2 Electrical Characteristics
- 12.3 Reaction On Microprocessor Safety Management Unit (SMU - Pin ERR): 微处理器安全管理单元(SMU - 引脚 ERR)的反应:
- 12.3.1 Immediate reaction on ERR monitoring failure 对 ERR 监控失败立即做出反应
- 12.3.2 Recovery delay reaction on ERR monitoring failure ERR 监控失败时的恢复延迟反应
- 12.4 Reaction On Error Triggered State Transitions 对错误触发状态转换的反应
- 12.5 Reaction On Window Watchdog Output (WWO)
- 12.6 Reaction On Functional Watchdog Output (FWO)
- 12.7 Reaction On Thermal Shutdown (TSD) 热关断反应 (TSD)
- 13 SPI - Serial Peripheral Interface SPI - 串行外设接口
- 13.1 Introduction
- 13.2 SPI Write Access To Protected Registers 对受保护寄存器的 SPI 写访问
- 13.3 SPI Write Initiated State Transition Request And Regulator Configuration SPI 写启动状态转换请求和稳压器配置
- 13.4 Registers Description 寄存器说明
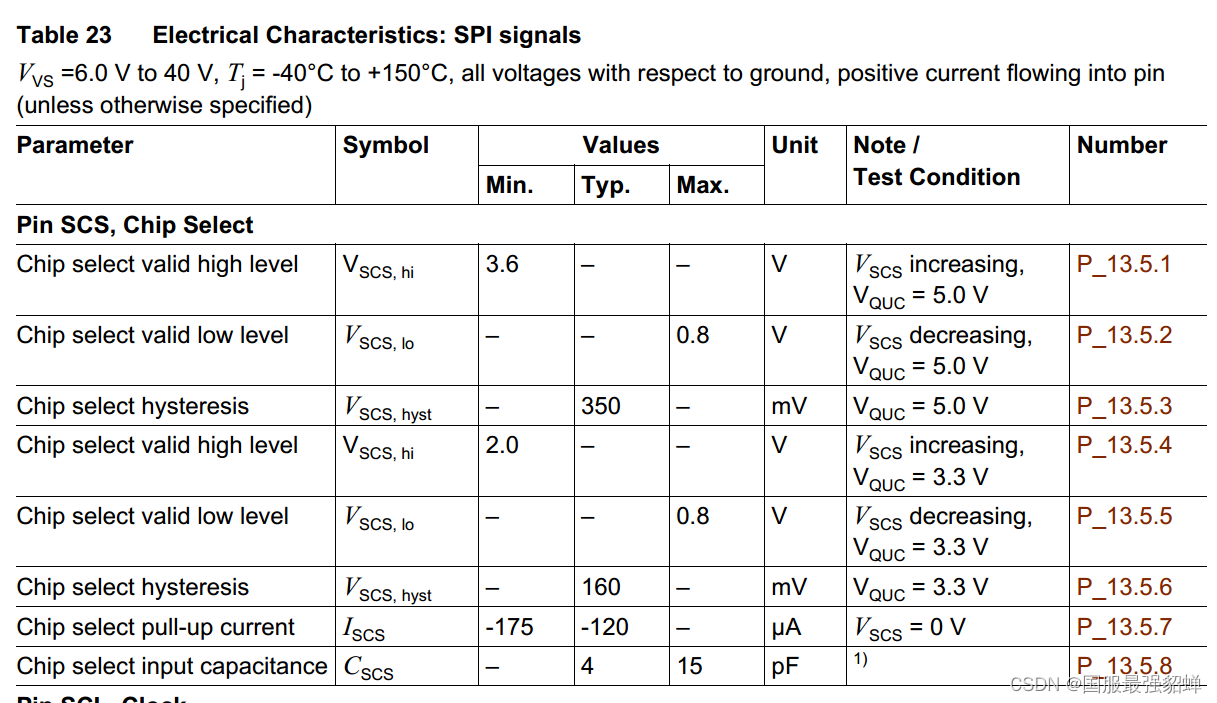
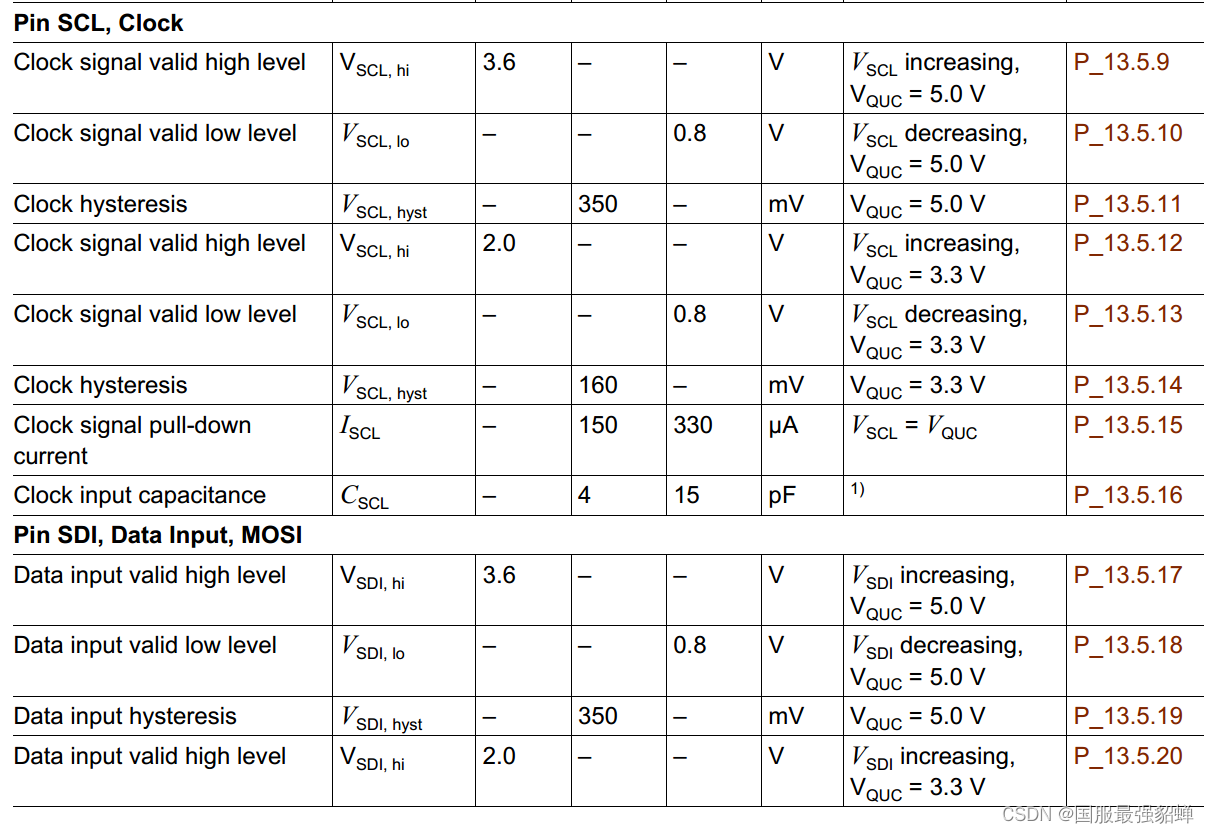
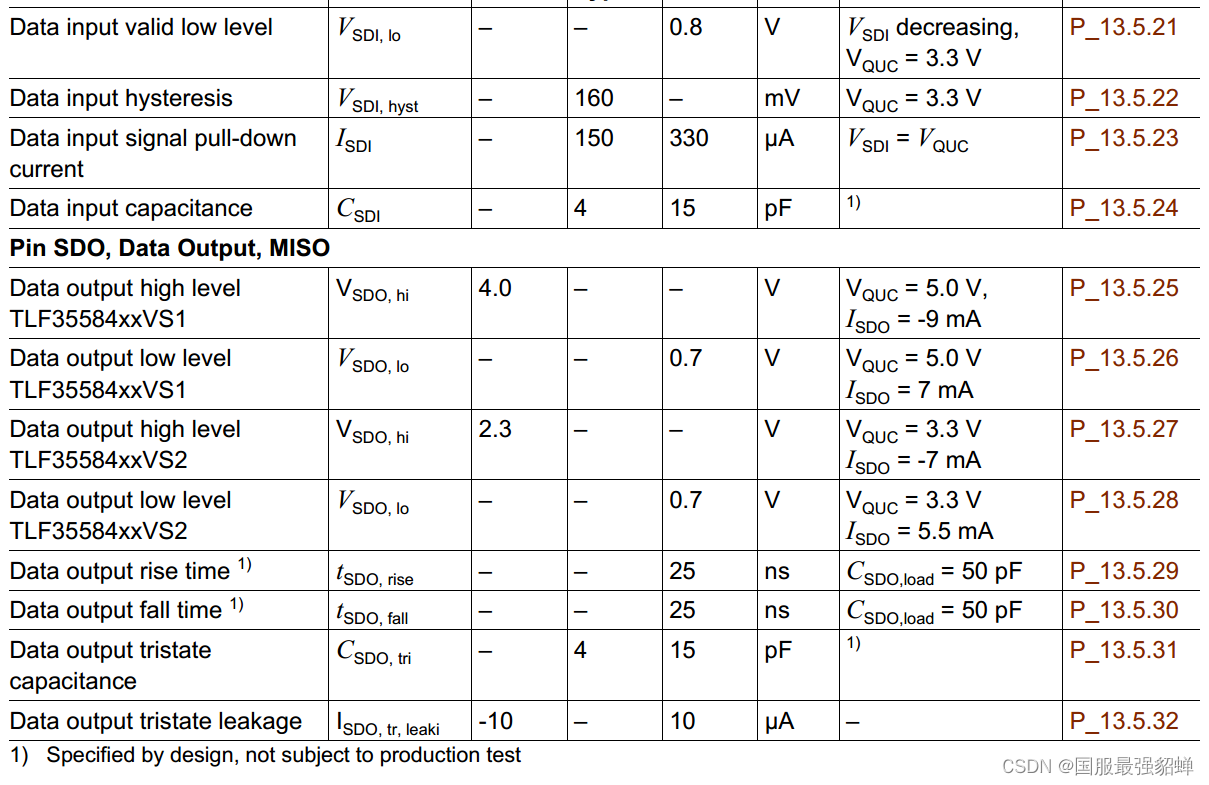
- 13.5 Electrical Characteristics
- 14 Interrupt Generation 中断产生
- 15 Window Watchdog And Functional Watchdog
- 15.1 Introduction
- 15.2 Window Watchdog
- 15.2.1 Timing Diagrams 时序图
- 15.2.1.1 Normal operation: Correct triggering 正常操作:正确触发
- 15.2.1.2 Fault operation: No trigger in open window after initialization 故障操作:初始化后打开窗口无触发
- 15.2.1.3 Fault operation: No trigger in Open Window in steady state 故障操作:稳定状态下开窗无触发
- 15.2.1.4 Fault operation: False trigger in Closed Window after initialization 故障操作:初始化后关闭窗口中错误触发
- 15.2.1.5 Fault operation: False trigger in Closed Window in steady state 故障操作:稳态关闭窗口中的误触发
- 15.2.2 Electrical characteristics
- 15.3 Functional Watchdog
- 15.3.1 Timing Diagrams 时序图
- 15.3.1.1 Normal operation: Correct triggering 正常操作:正确触发
- 15.3.1.2 Fault operation: Synchronization is missing 故障操作:同步丢失
- 15.3.1.3 Fault operation: Answer is wrong 故障操作:答案错误
- 15.3.1.4 Fault operation: Missing response 故障操作:缺少响应
- 16 Application Information 应用信息
- 17 Package Outlines 封装外形
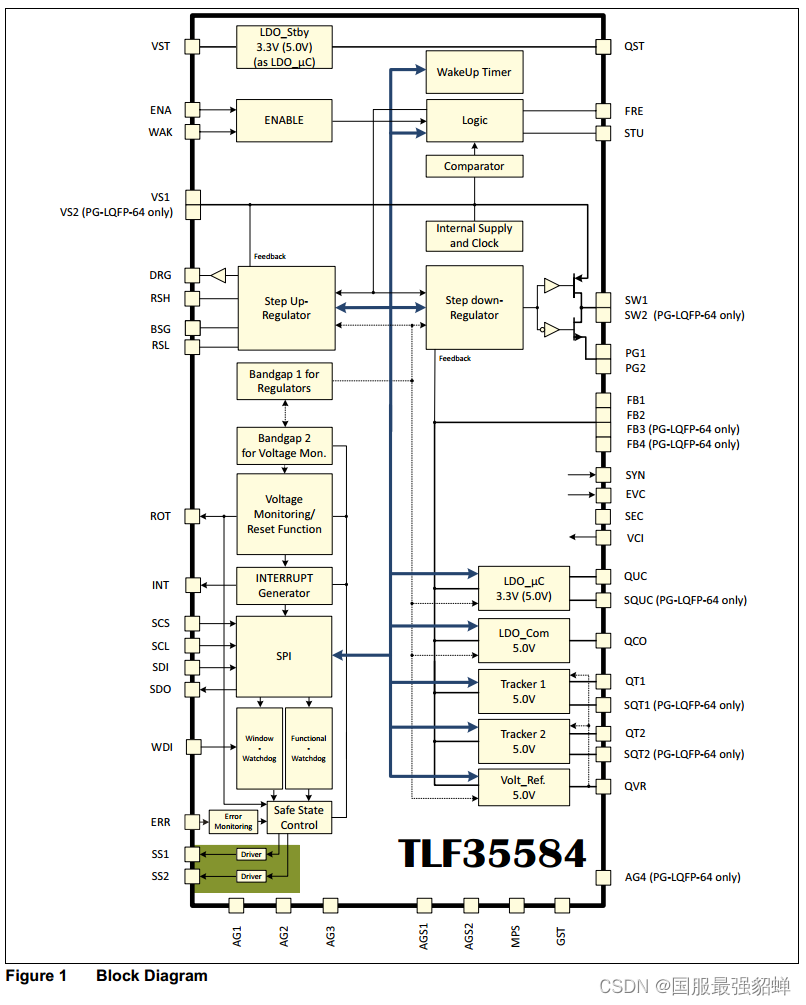
1 Overview
高效多电压电源芯片
串行升压和降压前置稳压器可用于3.0至40 V的宽输入电压范围,具有全面的性能,并且比所有功耗下均低
通信电源的低压降稳压器5.0V / 200mA(名为LDO_Com)
用于μC电源的低压降后置稳压器5.0 V / 600 mA(TLF35584xxVS1)或3.3 V / 600 mA(TLF35584xxVS2)(称为LDO_μC)
为核心电源提供可选的外部后置稳压器,提供启用,同步输出信号和电压监控(内部器件添加到复位功能)
电压基准5.0 V +/- 1%用于ADC电源,150 mA电流容量(称为Volt_Ref)
两个传感器电源跟踪器,每个电压参考150 mA电流能力(称为跟踪器1和跟踪器2)
备用稳压器5.0 V / 10 mA(TLF35584xxVS1)或3.3 V / 10 mA(TLF35584xxVS2)(称为LDO_Stby)
具有复位功能的独立电压监控模块
可配置的功能和窗口看门狗
16-bit SPI
具有可编程延迟的两个安全状态信号的安全状态控制
输入电压监视(过压关闭)
2 Block Diagram
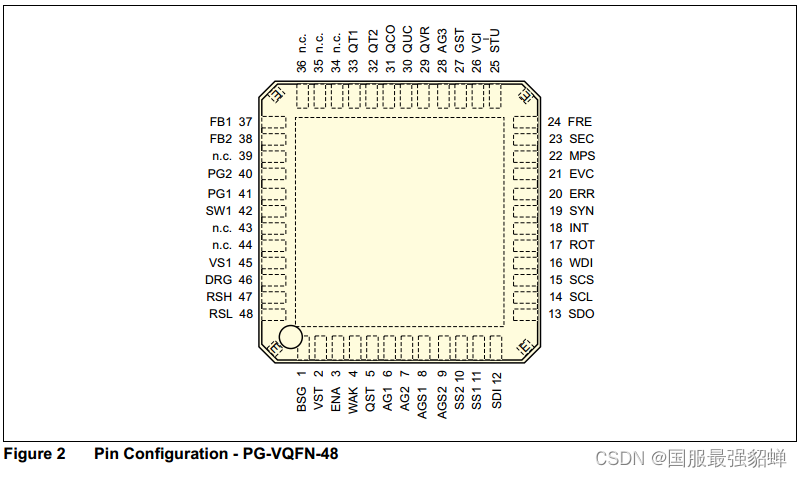
3 Pin Configuration
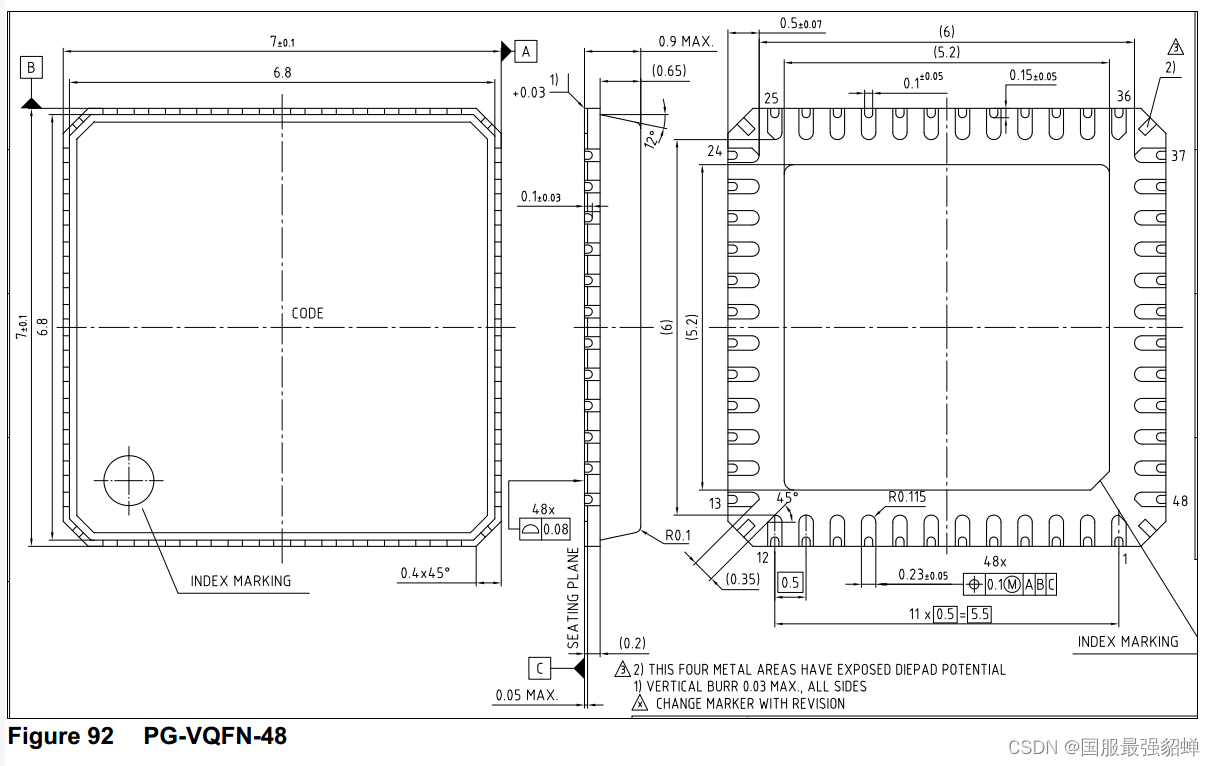
3.1 Pin Assignment - PG-VQFN-48
- BSG: Boost driver ground将此引脚连接至外部电流检测电阻的低端,以将驱动器噪声从敏感接地去耦。如果不使用升压预调节器选项,则接地。
- VST Supply voltage standby regulator, input: 将此输入连接到电源(电池),并在引脚和地之间连接反向保护二极管和电容。 建议使用EMC滤波器。
- ENA Enable Input: 该引脚上的正边沿信号将唤醒器件。 如果不使用连接到地面。
- WAK Wake/Inhibit Input:该引脚上定义长度的高电平信号将唤醒器件。 如果不使用连接到地面。
- QST Output standby LDO: 尽可能靠近引脚连接一个电容
- AG1 Analogue ground, pin 1: 模拟地,引脚
- AG2 Analogue ground, pin 2: 直接将此引脚(低欧姆和低电感)接地
- AGS1 Analogue ground, safety, pin1: 直接将此引脚(低欧姆和低电感)接地。如果使用安全开关,则直接连接到所用NMOS的源极。
- AGS2 Analogue ground, safety, pin 2: 直接将此引脚(低欧姆和低电感)接地。如果使用安全开关,则直接连接到所用NMOS的源极。
- SS2 Safe state signal 2: 安全状态输出信号2,将应用程序设置为安全状态。 信号延迟 SS1,延迟可通过SPI命令调整
- SS1 Safe state signal 1: 安全状态输出信号1,将应用程序设置为安全状态。
- SDI 串行外设接口,信号数据输入:SPI信号端口,连接到微处理器的SPI端口“数据输出”以在SPI通信期间接收命令。
- SDO 串行外设接口,信号数据输出:SPI信号端口,连接微处理器的SPI端口“数据输入”以在SPI通信期间发送状态信息
- SCL 串行外设接口,信号时钟:SPI信号端口,连接到微处理器的SPI端口“时钟”,为器件提供时钟以进行SPI通信。
- SCS 串行外设接口,信号片选:SPI信令端口,连接到微处理器的SPI端口“芯片选择”以寻址SPI通信设备
- WDI Watchdog input, trigger signal: 输入触发信号,将微处理器的“触发信号输出”连接到该引脚。在未使用的情况下保持打开状态(内部下拉)。
- ROT Reset output: 具有内部上拉电阻的开漏极结构。该引脚的低电平信号表示复位事件。
- INT Interrupt signal: 推挽级。该引脚的低电平脉冲表示中断,微处理器应读出SPI状态寄存器。连接到微处理器内核电源电压的不可屏蔽中断端口(NMI)。
- SYN Synchronization output signal:将此输出连接至可选的外部开关模式后置稳压器同步输入。该信号以相位或移位180°(可通过SPI命令选择)传递降压调节器开关频率。开关模式后置稳压器应与上升沿同步。 如果不使用,请保持打开状态。
- ERR Error signal input:来自微处理器安全管理单元(SMU,微处理器的内部故障检测)的错误信号输入将微处理器的“错误信号输出”连接到该引脚。
- EVC Enable external post regulator for core supply: 将此引脚连接至外部后置稳压器的使能输入。 如果不使用,请保持打开状态
- MPS Microcontroller programming support pin:微控制器编程支持引脚:将该引脚拉至地进行操作。该引脚可用于微控制器调试和编程目的。详情请参见第11.7章
- SEC Configuration pin for external post regulator for core supply:如果不使用选件外部稳压器,将此引脚接地。 如果使用选件外部后置调节器,请保持打开状态
- FRE Frequency adjustment pin: 将引脚连接到低频范围的地或在高频范围内保持开路
- STU Configuration pin for step up converter: 如果不使用选件升压预调节器,将此引脚接地。 如果使用可选升压预调节器,请保持打开状态
- VCI Input for optional external post regulator output voltage (core supply): 连接一个外部电阻分压器,以调节复位输出信号ROT的过压和欠压阈值。如果不使用选件外置调压器,请保持开路
- GST Gate stress pin: 不适合客户使用。直接将此引脚(低欧姆和低电感)接地
- AG3 Analogue ground, pin 3:直接将此引脚(低欧姆和低电感)接地
- QVR Output voltage reference: 尽可能靠近引脚连接一个电容。
- QUC Output LDO_uC supply (micro processor supply): 尽可能靠近引脚连接一个电容。
- QCO utput LDO_communication supply: 尽可能靠近引脚连接一个电容。
- QT2 Output tracker 2: 尽可能靠近引脚连接一个电容。
- QT1 Output tracker 1: 尽可能靠近引脚连接一个电容。
- N.C. Internally not connected:没有电气连接,可以保持开路/浮置,连接到GND或任何其他信号
- N.C. Internally not connected:没有电气连接,可以保持开路/浮置,连接到GND或任何其他信号
- N.C. Internally not connected:没有电气连接,可以保持开路/浮置,连接到GND或任何其他信号
- FB1 Step down pre regulator feedback input plus input for linear post regulators and trackers, pin1:(降低预调节器反馈输入,加上线性后置调节器和跟踪器的输入,引脚1:) 将降压前稳压器输出滤波器的电容与低欧姆和低电感连接直接连接到该引脚。 始终与FB2引脚并联
- FB2 Step down pre regulator feedback input plus input for linear post regulators and trackers, pin 2:(针对线性后置调节器和跟踪器,降低预调节器反馈输入和输入,引脚2:) 将降压前稳压器输出滤波器的电容与低欧姆和低电感连接直接连接到该引脚。 始终与FB1引脚并联
- N.C. Internally not connected:没有电气连接,可以保持开路/浮置,连接到GND或任何其他信号
- PG2 Step down pre regulator power ground, pin 2:直接连接此引脚(低欧姆和低电感)到地和预调节器输出电容负极。 始终与PG1引脚并联
- PG1 Step down pre regulator power ground, pin 1: 直接连接此引脚(低欧姆和低电感)到地和预调节器输出电容负极。 始终与PG2引脚并联
- SW1 Step down pre regulator power stage output, pin 1: 将此引脚直接连接(低电阻和低电感)至预稳压器输出滤波器。 始终与引脚SW2并联连接
- N.C. Internally not connected:没有电气连接,可以保持开路/浮置,连接到GND或任何其他信号
- N.C. Internally not connected:没有电气连接,可以保持开路/浮置,连接到GND或任何其他信号
- VS1 Supply voltage step down pre regulator, pin 1, input:将此输入与VS2并联连接至升压预调节器的输出。如果不使用升压预调节器选项,则与VS2并联连接,在引脚和地之间提供带反向保护二极管和电容的(电池)电压。 建议使用EMC滤波器。
- DRG Driver output for external step up regulator power stage, connect to gate: 升压预调节器低压侧开关门:连接到外部N沟道MOSFET的栅极,线路要笔直且尽可能短。如果不使用升压预调节器选项,请保持打开状态
- RSH Sense resistor for external step up regulator power stage, high side: 将此引脚连接至外部电流检测电阻的高端,以确定通过外部N沟道MOSFET的最大电流阈值。 如果不使用升压预调节器选项,则接地。
- RSL Sense resistor for external step up regulator power stage, low side: 将此引脚连接至外部电流检测电阻的低端,以确定通过外部N沟道MOSFET的最大电流阈值。 如果不使用升压预调节器选项,则接地
EP1 Edge pin no 1: 请保持该引脚下面的区域没有接地或其他信号,不要将此引脚焊接到地或任何其他信号。该引脚必须保持无焊接
EP2 Edge pin no 2:请保持该引脚下面的区域没有接地或其他信号,不要将此引脚焊接到地或任何其他信号。 该引脚必须保持无焊接
EP3 Edge pin no 3: 请保持该引脚下面的区域没有接地或其他信号,不要将此引脚焊接到地或任何其他信号。 该引脚必须保持无焊接
EP4 Edge pin no 4: 请保持该引脚下面的区域没有接地或其他信号,不要将此引脚焊接到地或任何其他信号。 该引脚必须保持无焊接
GND 冷却片。内部连接到GND
4 General Product Characteristics
4.1 Absolute Maximum Ratings 绝对最大额定值
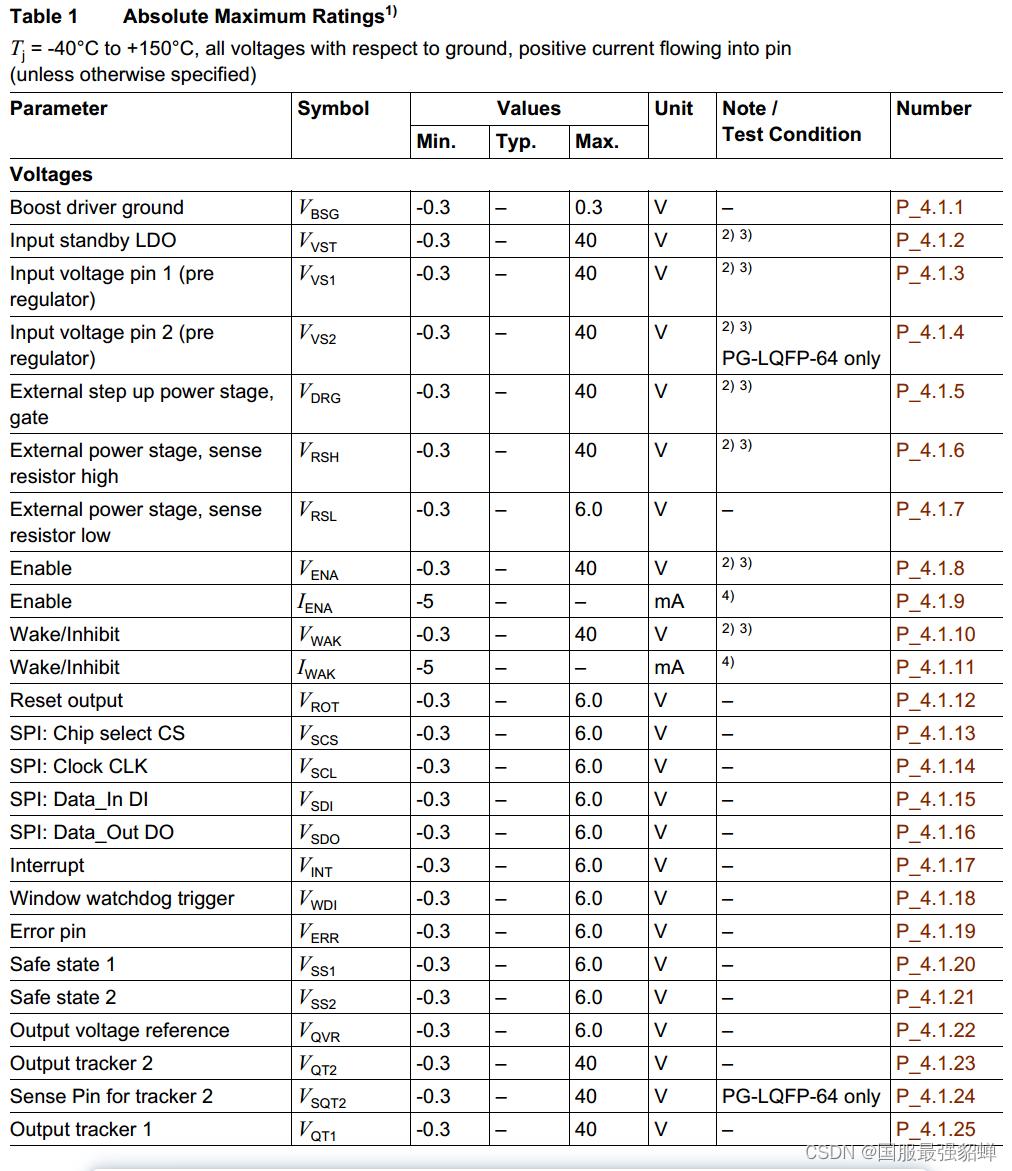
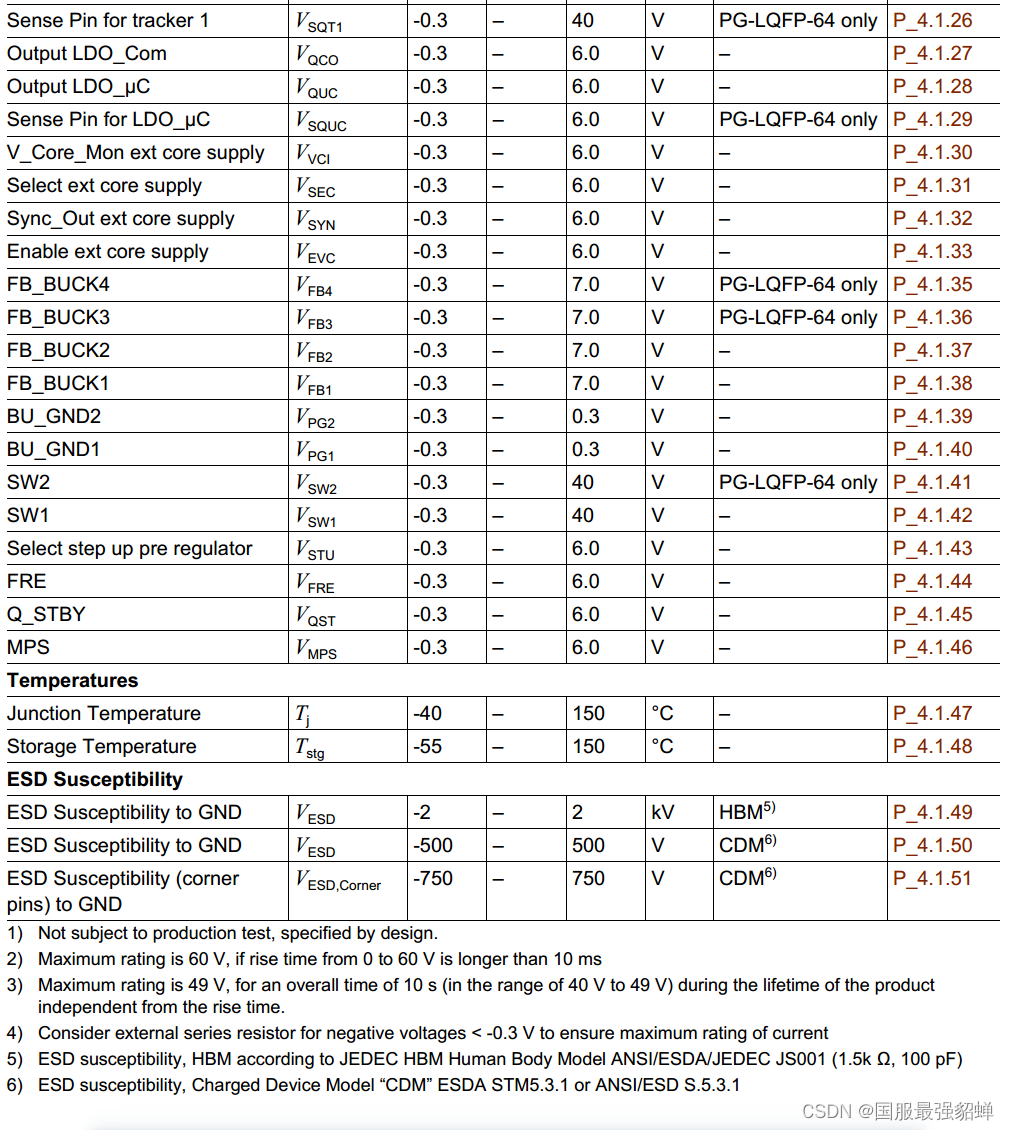
Notes
- 超过此处列出的应力可能会对设备造成永久性损坏。长时间暴露在绝对最大额定值条件下可能会影响器件的可靠性。
- 集成保护功能旨在防止 IC 在数据表中描述的故障条件下被损坏。故障情况被视为“超出”正常工作范围。保护功能不适用于连续重复操作。
4.2 Functional Range
电源电压范围为V Bat = 3 - 40 V(降压预调节器之前激活升压预调节器)
启动TLF 35584需要最低输入电压为V VS = 6.0V的引脚VSx。(没有升压预调节器激活)
结温Tj -40 - 150 °C
4.3 Thermal Resistance 热阻
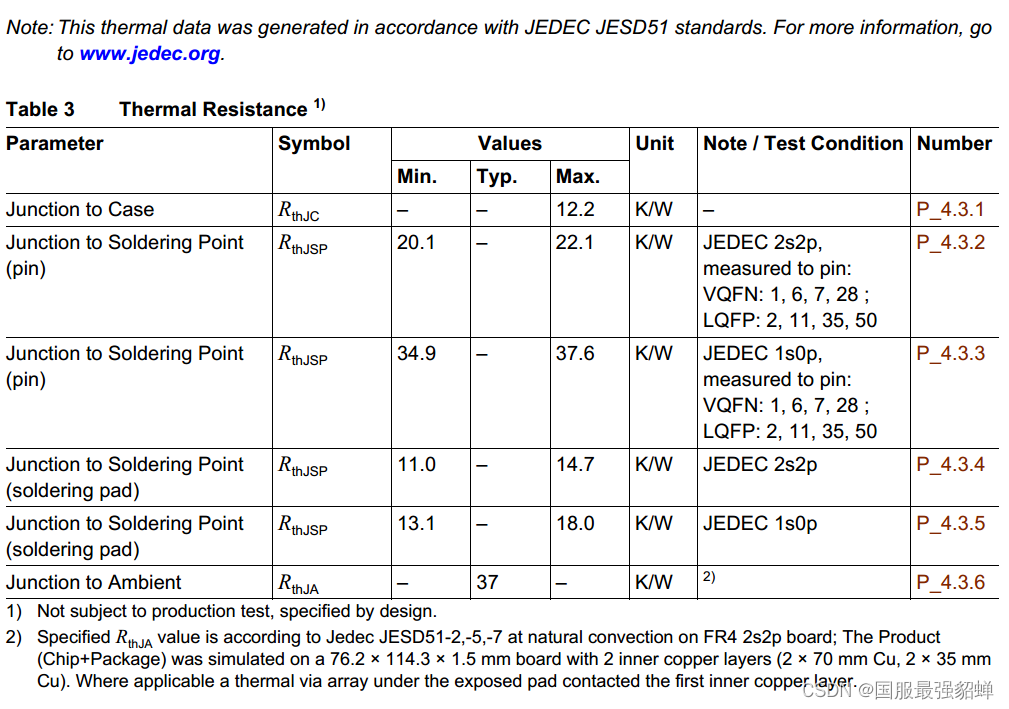
4.4 Quiescent Current Consumption
静态电流消耗1)VVS =6.0 V至40 V,Tj = -40 ° C至+150 ° C,所有电压相对于地,正电流流入引脚(除非另有说明)
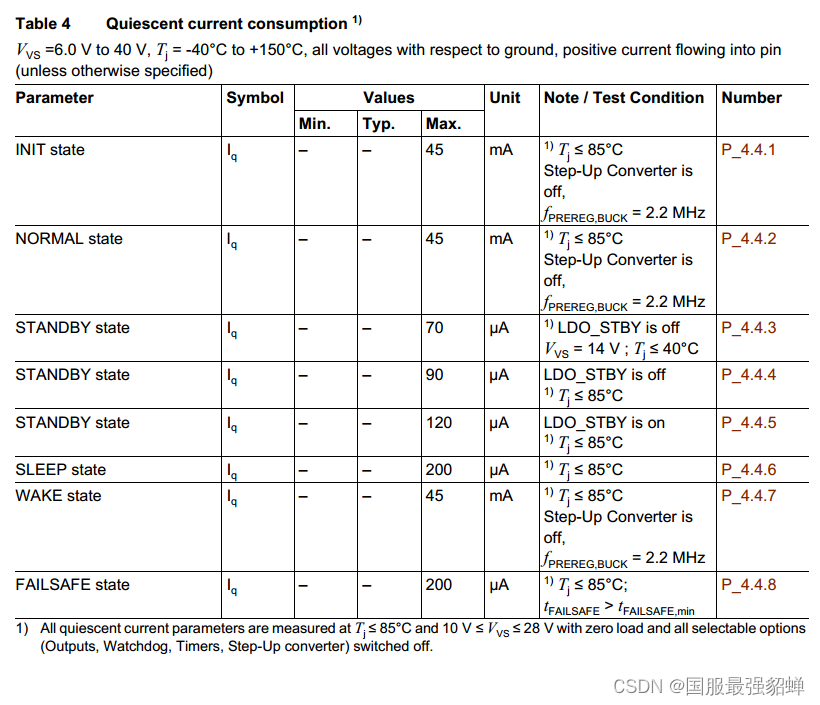
所有静态电流参数均在Tj≤ 85°C和10 V ≤ VVS ≤ 28 V条件下测量,零负载且所有可选选项(输出、看门狗、定时器、升压转换器)均关闭。
5 Wake Function 唤醒功能
5.1 Introduction
TLF35584在连接到电池时自动开启(上电复位POR),并进入INIT状态,在此状态下将对器件进行配置。配置成功后,器件将通过SPI命令进入NORMAL状态。从NORMAL或WAKE状态,器件可以通过SPI命令进入低功耗状态(睡眠或待机)。 WAK和ENA信号是离开低功耗状态(或故障安全状态)的外部触发器。
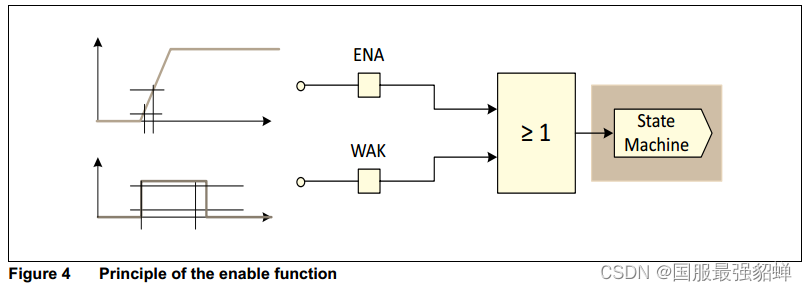
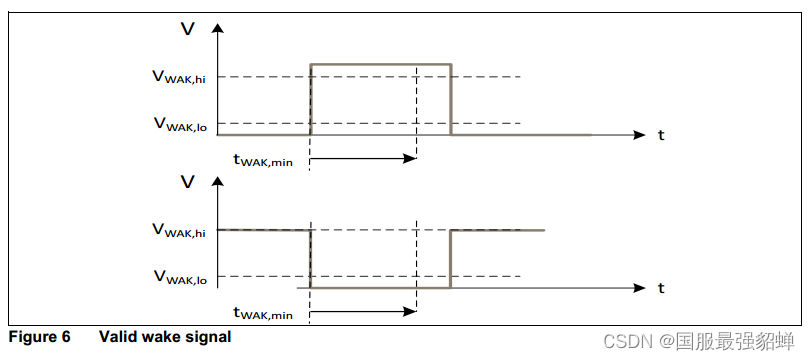
Wake (pin WAK - level triggered) / Enable (pin ENA - edge triggered)
唤醒(WAK引脚-电平触发)/使能(ENA引脚-边沿触发)
WAK和ENA输入引脚支持电池电压电平。电压高于VWAK,hi的信号施加在WAK引脚tWAK,min表示有效唤醒信号。上升时间为tENA,rise的ENA引脚正向沿也表示有效唤醒信号。
有效的唤醒信号将使设备从待机状态进入初始状态,从睡眠状态进入唤醒状态,或从故障安全状态进入初始状态。
WAK引脚上的低电平信号VWAK,lo以及ENA引脚上的负向沿不会对状态机产生影响,也不会启动状态之间的转换。
如果在从NORMAL(正常)状态到SLEEP(睡眠)状态的转换阶段检测到有效的唤醒信号,则设备将启动到WAKE(唤醒)状态的转换并生成中断。
如果在从正常状态到待机状态的过渡阶段检测到有效的唤醒信号,则设备将启动到INIT状态的过渡,并将生成复位(ROT)。
在发送SPI转换命令之前,无需将ENA引脚置于VENA,thrlo以下。即使ENA引脚为高电平(高于VENA,thrhi),SPI转换命令仍将使器件进入睡眠或待机状态。
有关详细信息,请参阅第11章状态机。
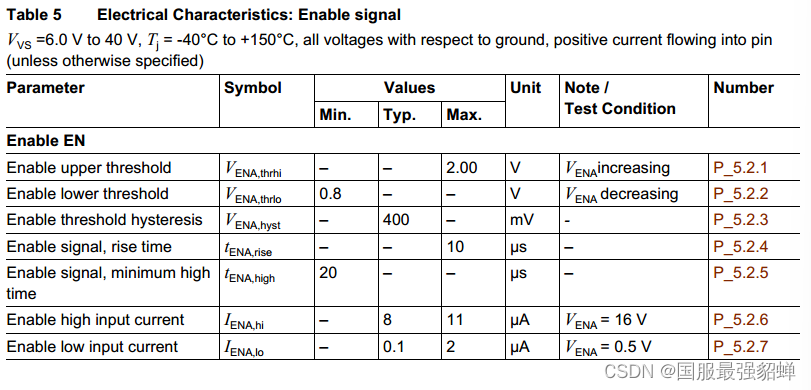
5.2 Electrical Characteristics Enable Signal 电气特性 使能信号
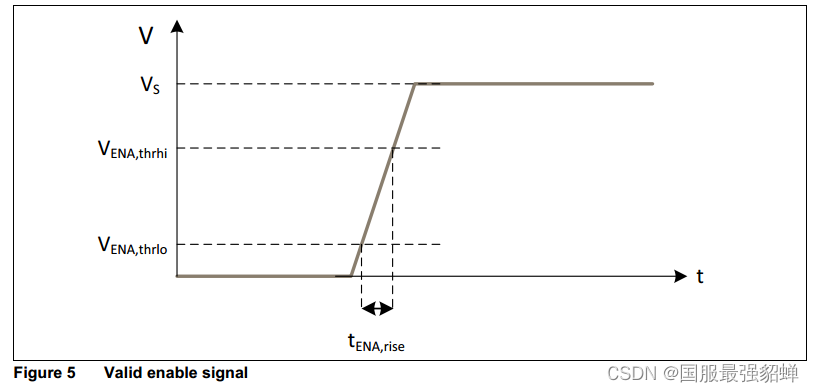
启用上限阈值
启用较低阈值
使能阈值滞后
使能信号,上升时间
使能信号,最小高电平时间
使能高输入电流
使能低输入电流
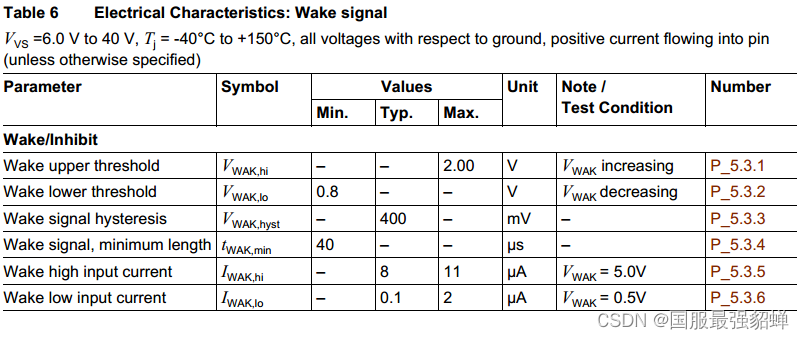
5.3 Electrical Characteristics Wake Signal 电气特性 唤醒信号
唤醒上限
唤醒下限
唤醒信号滞后
唤醒信号,最小长度
唤醒高输入电流
唤醒低输入电流
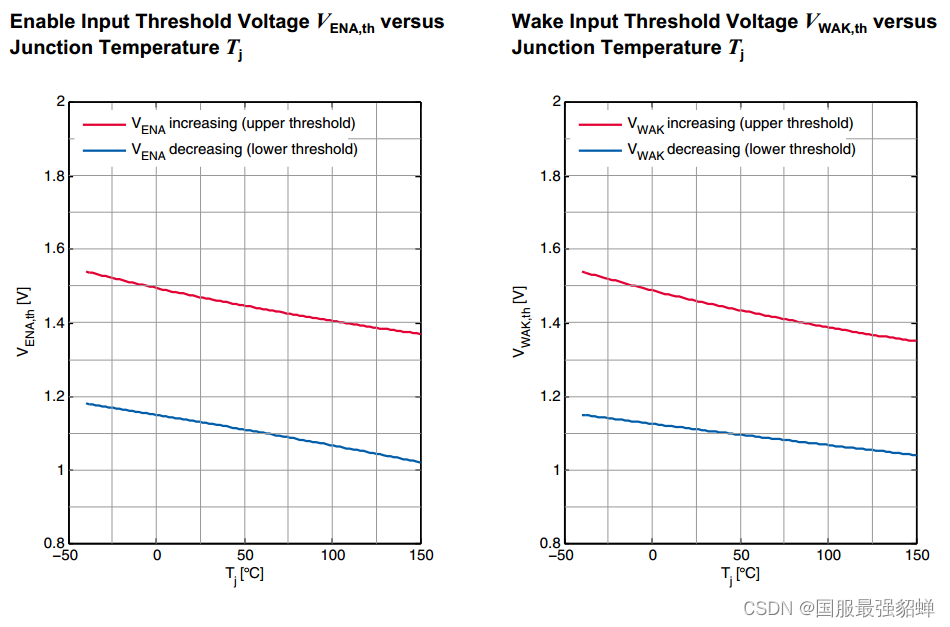
5.4 Typical Performance Characteristics 典型性能特征
使能输入阈值电压 VENA,th 与结温 Tj,唤醒输入阈值电压 VWAK,th 与结温 Tj
6 Pre Regulators 预调节器
6.1 Introduction
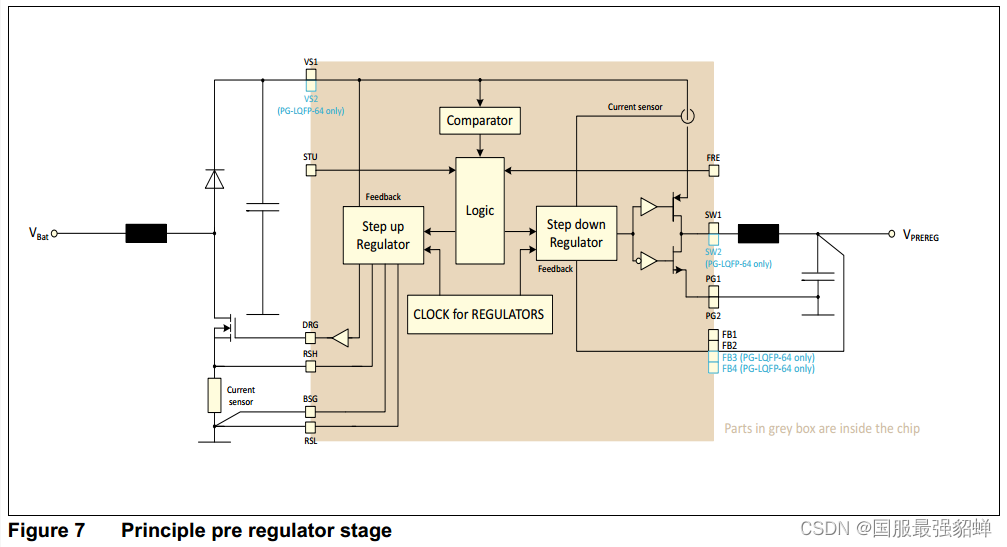
前置稳压器必须保持稳定且恒定的中间电路电压,以便为后续的后置稳压器供电。它由两个独立的稳压器组成: 一个升压转换器,前面有一个外部功率级,用于维持后面的降压转换器的最小输入电压。
通过将引脚 STU 接地,可以停用升压转换器(如果不需要)。将 STU 引脚保持开路会激活升压调节器。
降压调节器频率可以通过将引脚 FRE 保持开路(对于高开关频率范围)或连接到 GND(对于低开关频率范围)来预设。
降压转换器持续开启,提供稳定的中间电路电压VPREREG,为后续的后置稳压器供电。升压转换器直接连接到输入电压VBat。它仅在低输入电压条件(即起动)期间,当输入电压降至阈值 VPRE_REG,boost,UV 以下时运行,以保持输入电压足够高,以供后续降压调节器使用。低输入电压条件意味着 VSx 引脚上的输入电压太低,无法提供指定限制内的中间电路电压 VPREREG。连接到输入电压路径的内部比较器检测何时开启升压转换器的阈值。如果输入电压高于升压转换器输出电压(开启升压转换器的阈值),则内部比较器将停用该调节器。内部逻辑会在需要时打开(并再次关闭)升压转换器。
6.2 Step Up Regulator 升压稳压器
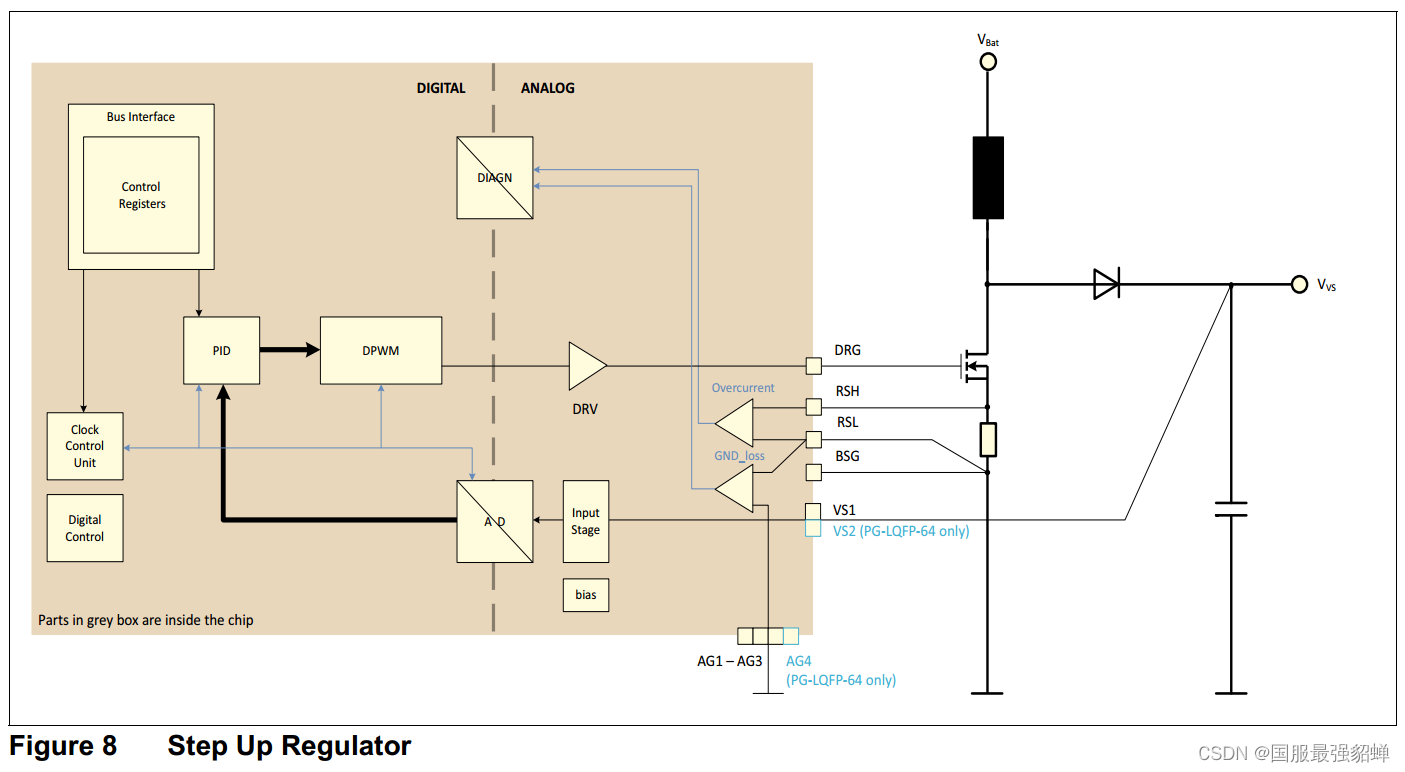
6.2.1 Functional description功能描述
异步升压预稳压器在工作时提供比输入电压更高的输出电压。
只要电源电压太低而无法在后置调节器输出上实现标称值,就会出现这种情况。升压预调节器输出电压将远低于标称电源(电池)电压,以确保他仅在低输入电压条件下工作。
如果应用不需要升压功能,则可以跳过外部功率元件(Mosfet、二极管),可以根据应用要求调整滤波器元件。
6.2.2 Electrical characteristics
预调节器升压输出电压
OC 阈值外部检测电阻
低侧检测输入电流
高侧检测输入电流
输入欠压阈值
输入欠压阈值迟滞
栅极驱动器峰值拉电流
栅极驱动器峰值灌电流
栅极驱动器输出上升时间
栅极驱动器输出下降时间
栅极驱动器输出电压
最大占空比
消隐时间
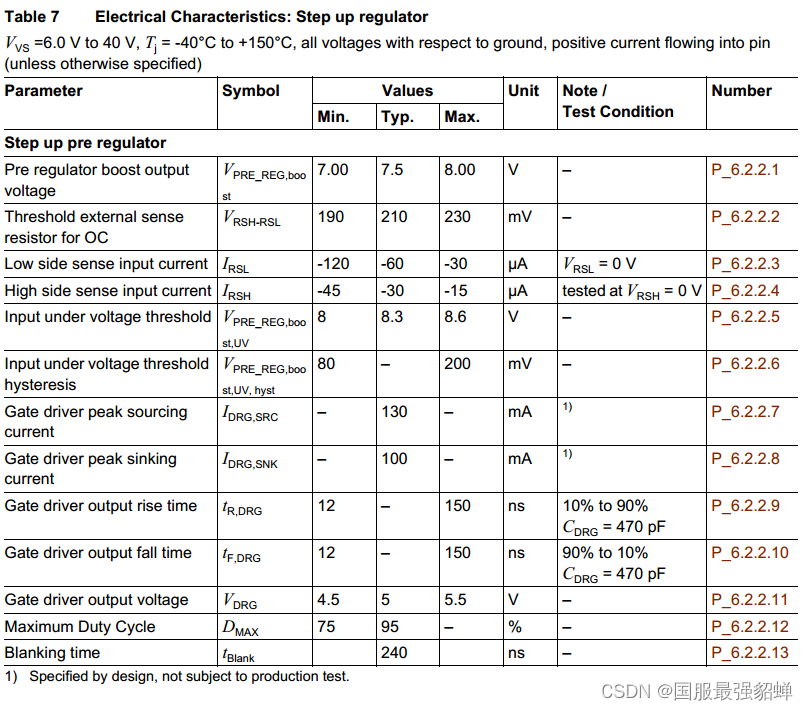
不受生产测试的影响.
6.3 Step Down Regulator 降压稳压器
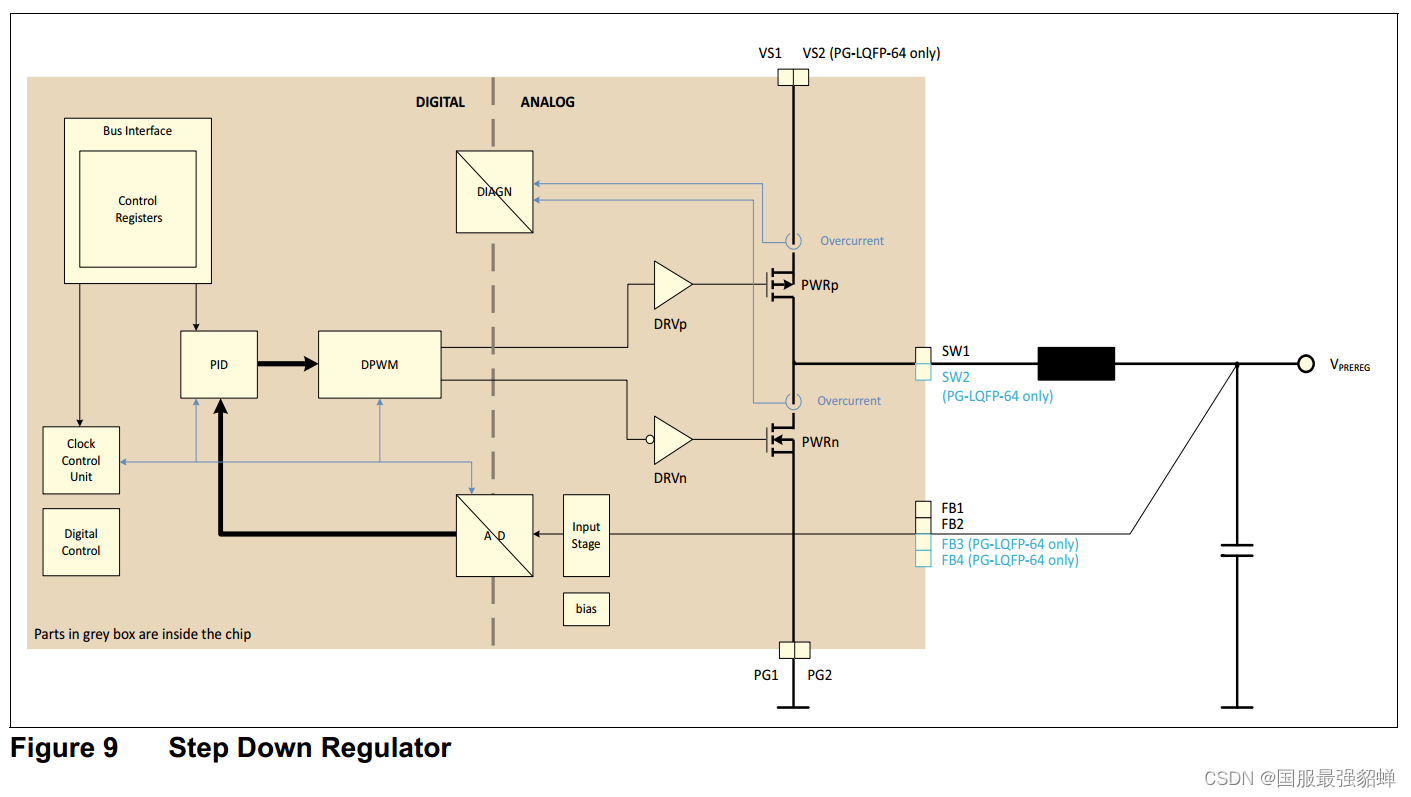
6.3.1 Functional description
同步降压前置稳压器持续运行,提供稳定的中间电路电压,为后续后置稳压器供电。内部功率级由同步 P 沟道(高压侧)和 N 沟道(低压侧)Mosfets 组成。为了启动,实现了软启动功能。
调节环路在电压模式下运行。
在正常负载条件下,调节器以脉宽调制 (PWM) 模式运行。在轻负载条件下,它将在脉冲频率调制 (PFM) 模式下运行,以最大限度地减少内部电流消耗(仅在睡眠状态下,不在正常、唤醒或初始化状态下)。
降压稳压器的输出滤波器的尺寸必须确保最大输出电压纹波为 100 mV,以便与后置稳压器指定的 PSRR 一致。
PSRR :电源电压抑制比(Power Supply Rejection Ratio)
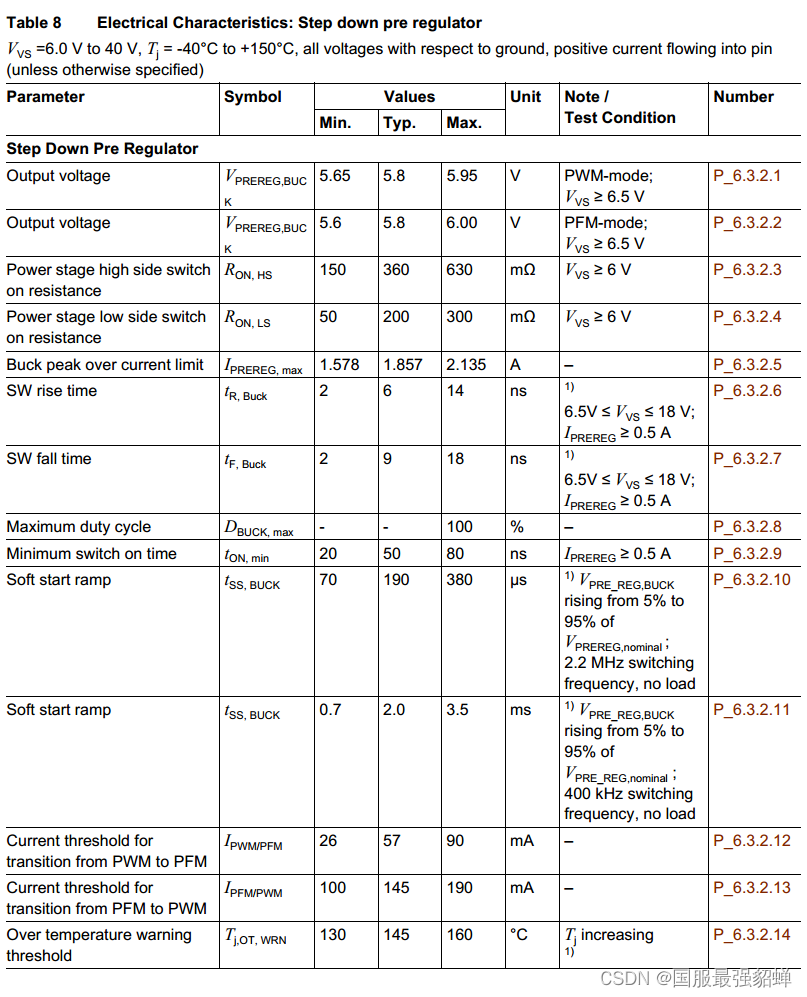
6.3.2 Electrical characteristics
输出电压
输出电压
功率级高侧开关导通电阻
功率级低侧开关导通电阻
降压峰值超过电流限制
SW上升时间
SW下降时间
最大占空比
最短接通时间
软启动斜坡(VPRE_REG,BUCK 从 VPREREG,nominal 5% 上升至 95%; 2.2 MHz 开关频率,空载)
软启动斜坡
从 PWM 转换到 PFM 的电流阈值
从 PFM 转换到 PWM 的电流阈值
超温警告阈值
过温关断阈值
过温传感器迟滞
6.3.3 Typical Performance Characteristics
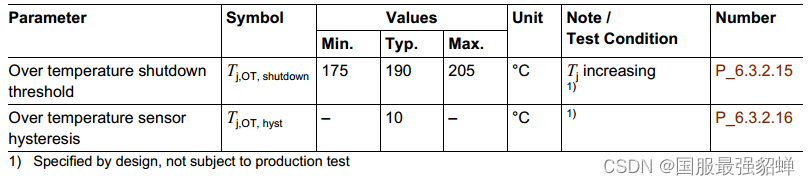
预稳压器输出电压 VPreReg 与结温 Tj(FRE 引脚:开路),预稳压器输出电压 VPreReg 与结温 Tj(FRE 引脚:GND)
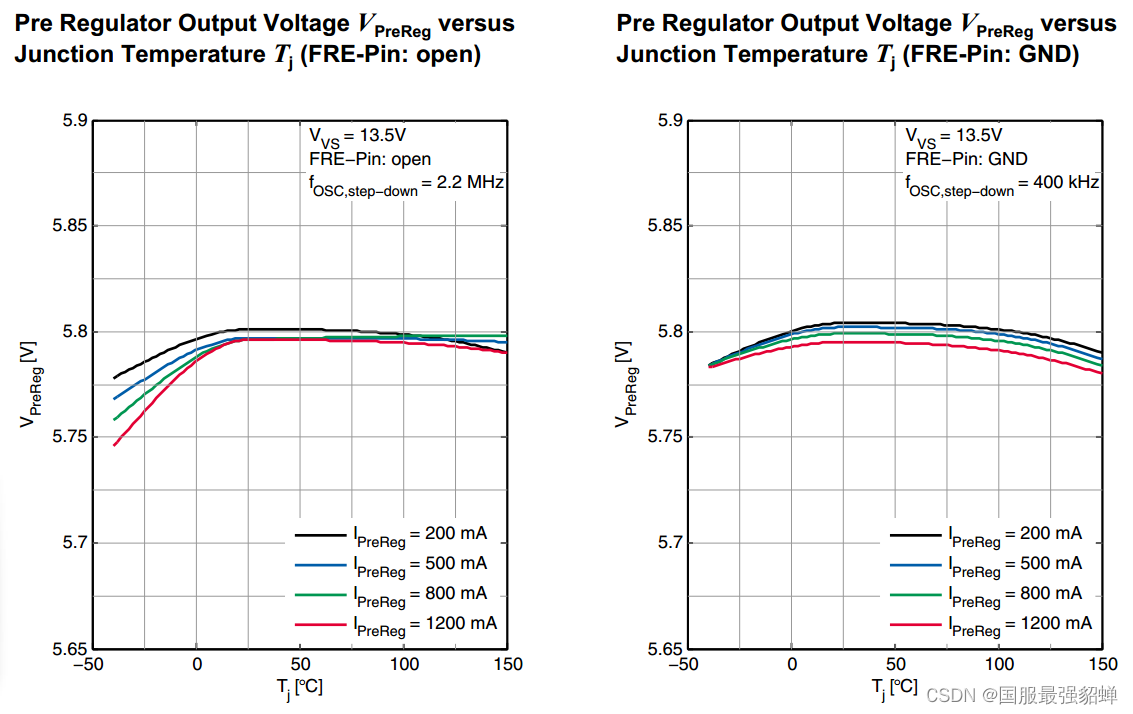
预稳压器输出电压 VPreReg 与负载电流 IPreReg(FRE 引脚:开路), 预稳压器输出电压 VPreReg 与负载电流 IPreReg(FRE 引脚:GND)
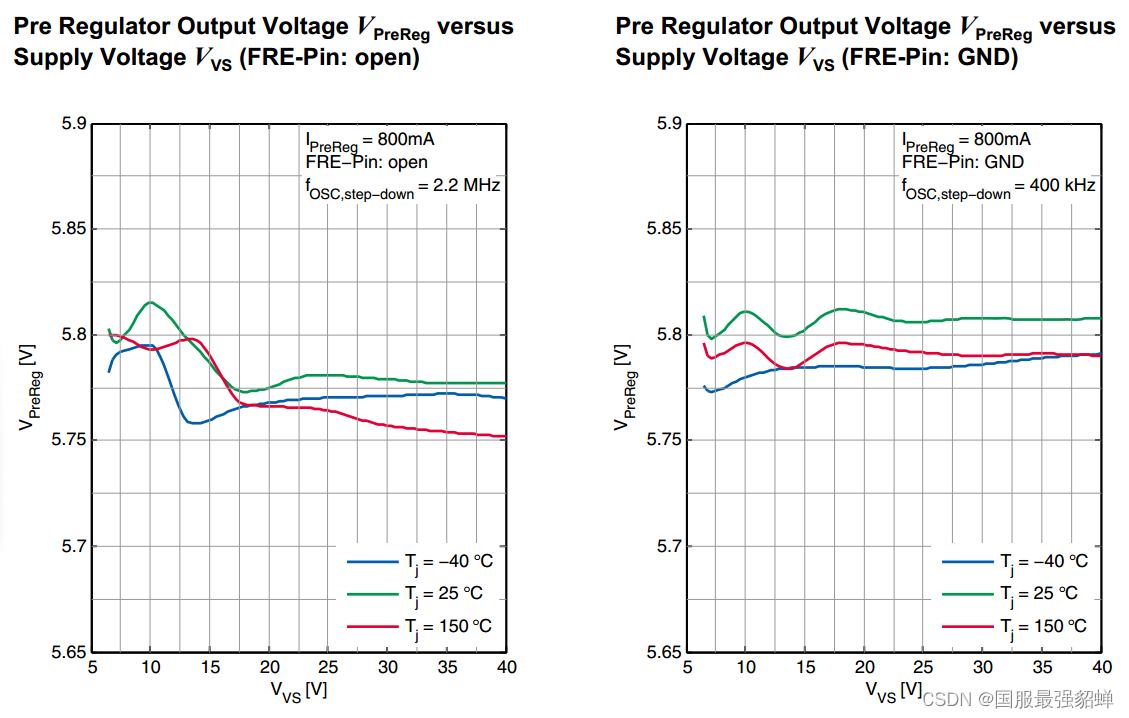
预稳压器输出电压 VPreReg 与电源电压 VVS(FRE 引脚:开路), 预稳压器输出电压 VPreReg 与电源电压 VVS(FRE 引脚:GND)
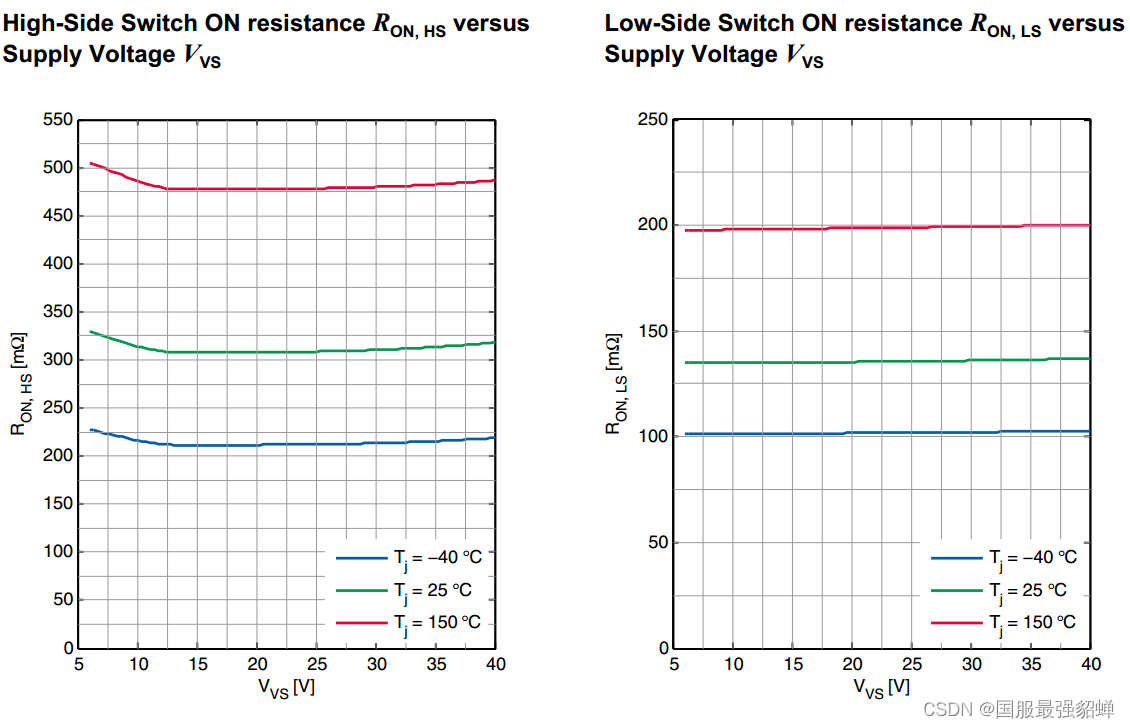
高侧开关导通电阻 RON、HS 与电源电压 VVS , 低侧开关导通电阻 RON、LS 与电源电压 VVS
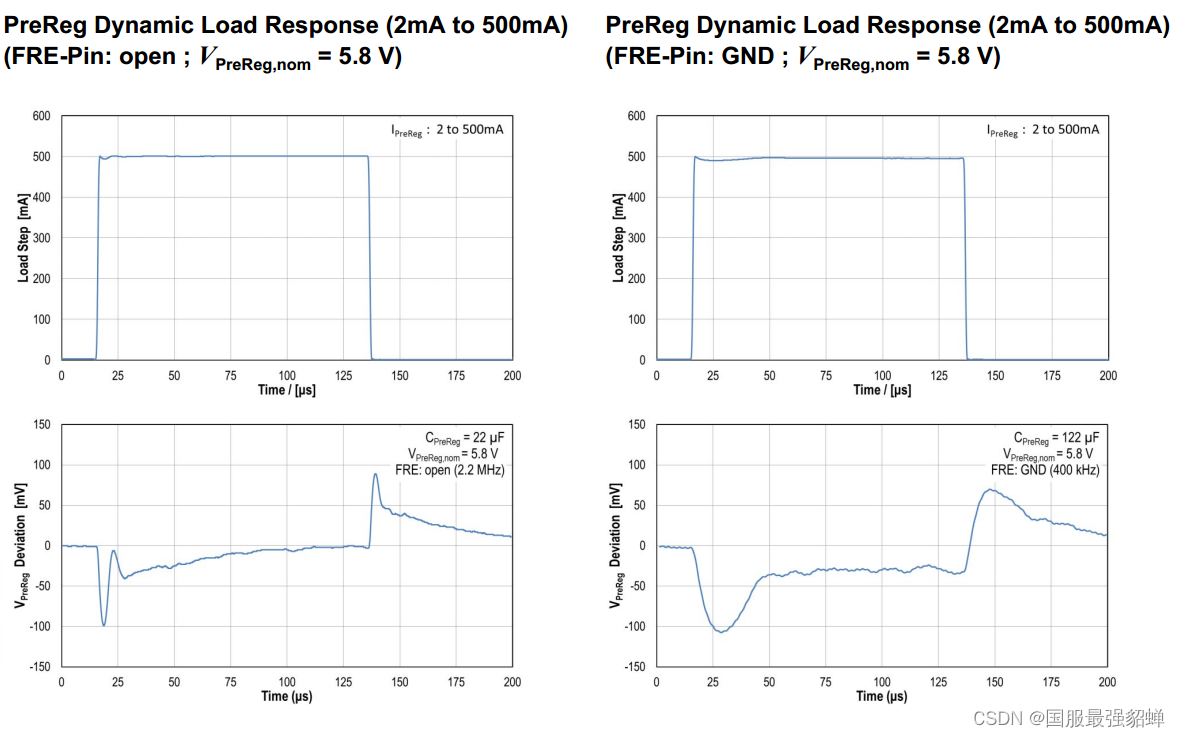
PreReg 动态负载响应(2mA 至 500mA)(FRE 引脚:开路;VPreReg,nom = 5.8 V) , PreReg 动态负载响应(2mA 至 500mA)(FRE 引脚:GND;VPreReg,nom = 5.8 V)
6.4 Frequency setting 频率设定
6.4.1 Introduction
频率源为升压预调节器和降压预调节器提供恒定频率。降压预调节器的同步电源开关将直接以频率 fOSC 进行切换。
通过将引脚 FRE 保持开路,可以将降压预调节器的频率范围设置为高开关频率范围,或者通过将引脚 FRE 连接到 GND,将降压预调节器的频率范围设置为低开关频率范围。开关频率将设置为所选频率范围的默认值。或者可以通过 SPI 命令 (BCK_FREQ_CHANGE) 对其进行微调,或者可以激活扩频选项 (BCK_FRE_SPREAD)。
升压预调节器的开关频率范围低于降压预调节器的开关频率范围。
如果 SEC 引脚保持开路,则降压前置稳压器的开关频率由 SYN 引脚提供,用于 µC 内核电源的可选外部开关模式后置稳压器。
PFM 模式下不支持同步功能。
TLF35584 无法同步到外部频率源。
6.4.2 Electrical characteristics frequency setting
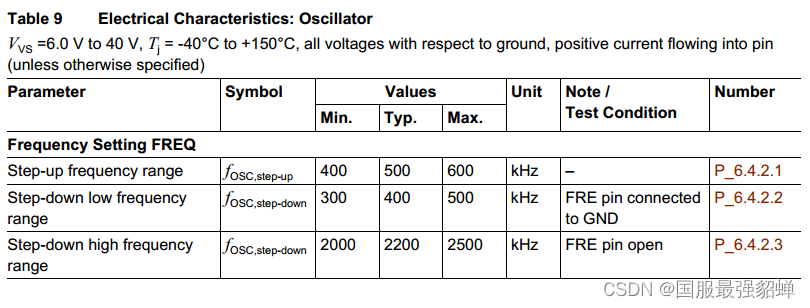
Electrical Characteristics: Oscillator 电气特性:振荡器
升压频率范围
降压低频范围
降压高频范围
6.4.3 Typical Performance Characteristics
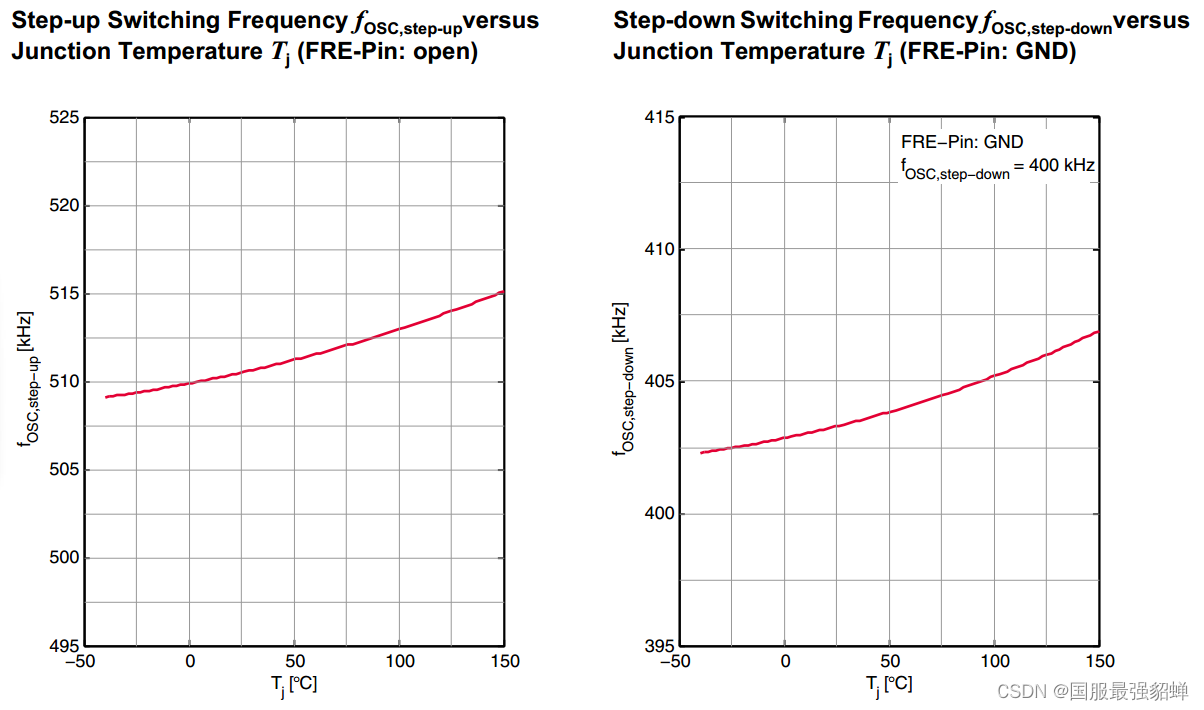
升压开关频率 fOSC,step-up与结温 Tj(FRE-引脚:开路), 降压开关频率 fOSC,step-down与结温 Tj(FRE-引脚:GND)
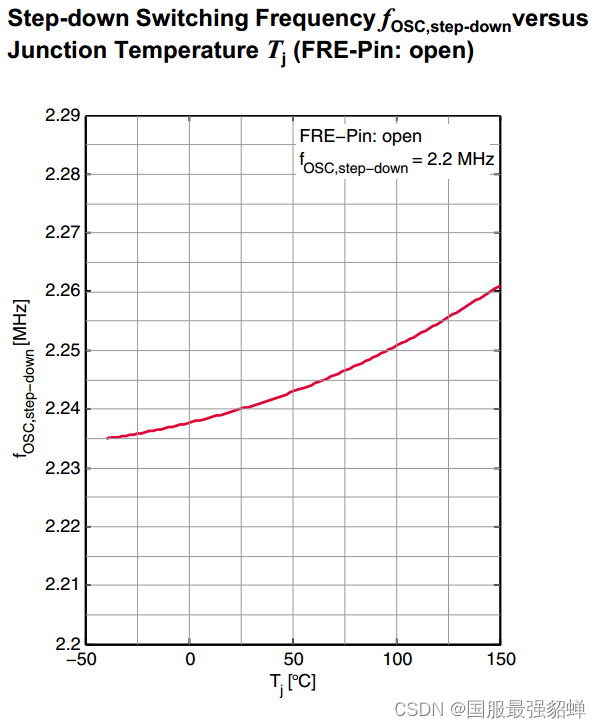
降压开关频率 fOSC,step-down与结温 Tj(FRE 引脚:开路)
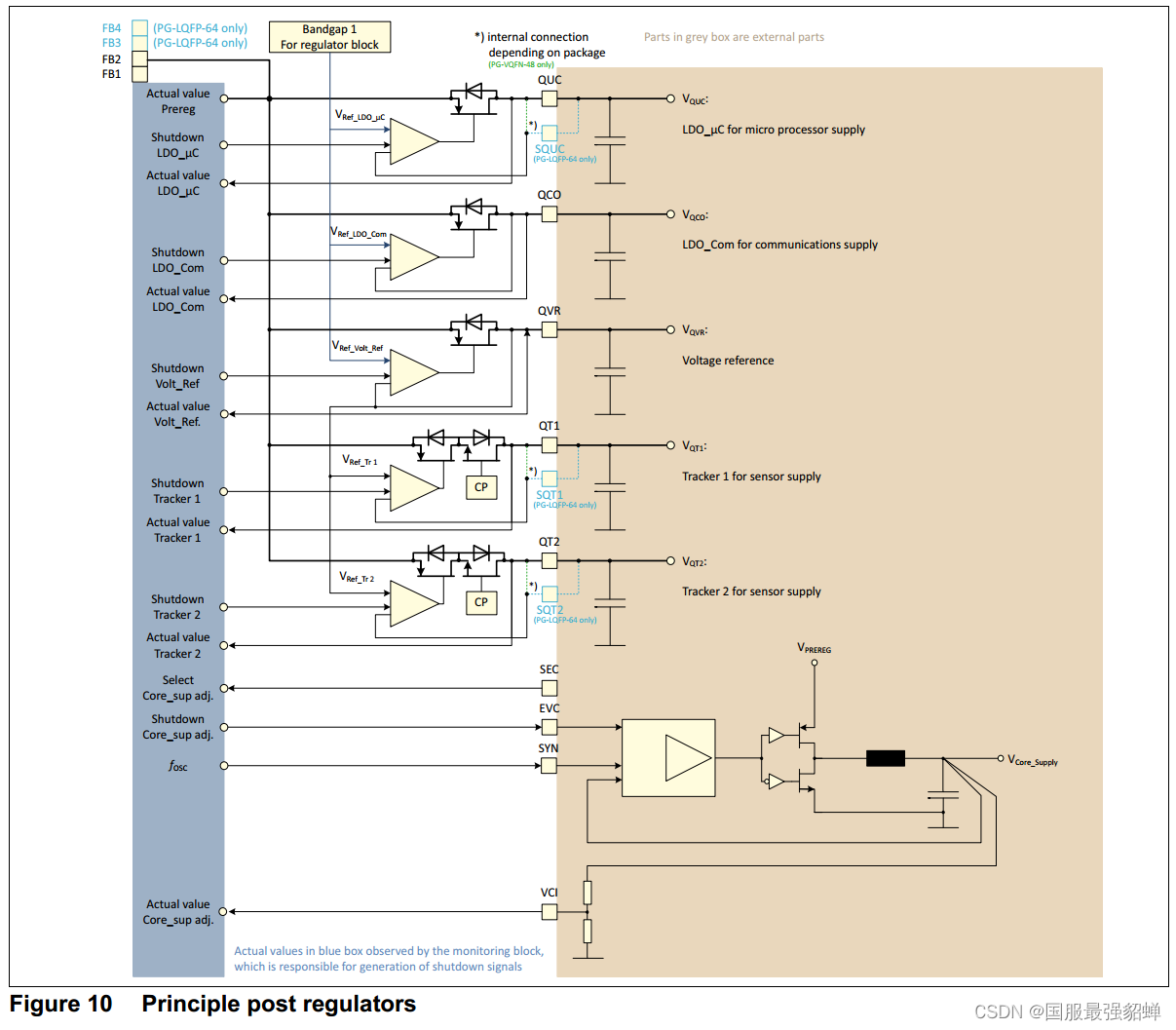
7 Post Regulators 后置调节器
7.1 Introduction
TLF35584 包括多个线性低压降后置稳压器和跟踪器,并可在需要时为 µC 内核电源连接外部后置稳压器。
线性后置调节器和跟踪器由 FBx 引脚供电。稳压器模块的带隙 1 为 µC 电源 LDO(引脚 QUC)、通信电源 LDO(引脚 QCO)和参考电压源(引脚 QVR)的误差放大器提供参考值。跟踪器从参考电压源(引脚 QVR)获取参考值。跟踪器 1 和 2 的输出电压(出现在引脚 QT1 和 QT2 处)跟随参考电压源 Volt_Ref,但有一个小下降。
可以添加一个额外的外部后置稳压器来为微处理器提供核心电源。如果使用此选项,则配置引脚 SEC 必须保持开路。如果不使用该选项,则引脚 SEC 必须接地。
后置调节器将连接到外部并使用其自己的参考电压,输入由前置调节器输出电压 VPREREG 馈送(与引脚 FBx 处的值类似)。后置稳压器由引脚 EVC 处的高信号启用,并由引脚 EVC 处的低信号关闭。 SYN 引脚提供同步信号(同相或与降压预调节器信号相移 180 度),以供开关模式后调节器使用。
后置稳压器的所有输出电压均连接至电压监控功能(请参阅Monitoring Function监控功能一章)。
如果出现过压,相关后置调节器将关闭,关闭信号由电压监控功能生成。
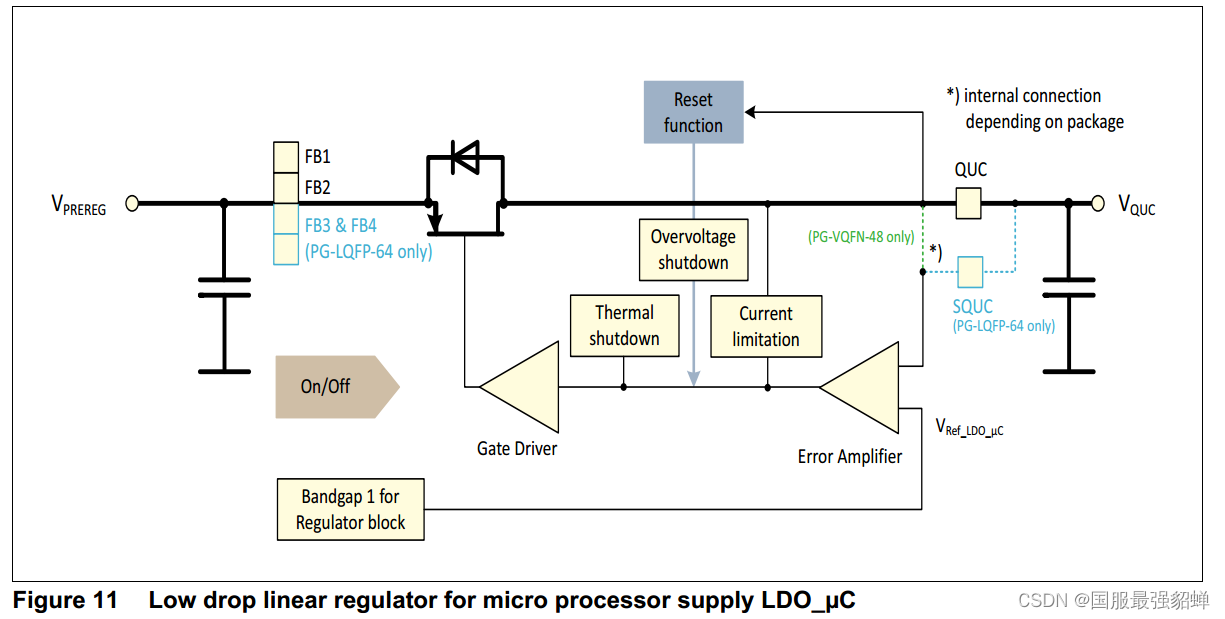
7.2 µ-Processor Supply µ 处理器电源 QUC
7.2.1 Functional description
线性低压降稳压器 LDO_µC 为微处理器电源提供精确的 3.3 V 或 5.0 V 输出电压。
调节器由提供稳定电压的中间电路电压 VPREREG 供电。输出电压 VQUC(位于 QUC 引脚)由误差放大器控制。将实际值与来自调节器带隙 1 的参考电压进行比较。控制环路的稳定性取决于负载电流、输出电容的特性和芯片温度。为确保稳定运行,应根据表 10“电气特性”中的规定要求(电容值和串联电阻 ESR)选择输出电容器。下图所示的输入电容是降压前置稳压器的输出滤波电容。
安装保护电路以防止稳压器和应用程序损坏:
• 为了保护LDO_μC 的传输元件免受过载影响,电流限制会将输出电流限制在指定的最大限值。电流感测通过电流镜完成,不使用感测电阻。当达到最大电流条件时,电流将被限制,因此输出电压将降低。调节器具有接地短路保护。
• 输出电压由电压监控器监控。如果 QUC 引脚过压,LDO_μC 将关闭,器件将进入故障安全状态。该事件将存储在 SPI 状态寄存器 (MONSF1) 中。如果 QUC 引脚欠压,器件将进入 INIT 状态,ROT 引脚将被拉低,事件将存储在 SPI 状态寄存器 (MONSF2) 中。如果输出欠压,稳压器不会关闭,且输出欠压小于对地短路检测时间 tStG。如果欠压持续时间超过 tStG,器件将进入故障安全状态。该事件也将存储在 SPI 状态寄存器 (MONSF0) 中。
• 该调节器有一个专用温度传感器。如果功率级温度超过预警阈值,中断将指示此事件,并将其存储在 SPI 状态寄存器 (OTWRNSF) 中。如果功率级温度超过温度关断阈值,器件将进入 FAILSAFE 状态,稳压器将关闭,并且事件将存储在 SPI 状态寄存器 (OTFAIL) 中。由于温度关闭而导致的关闭时间至少为一秒。
如果器件进入 FAILSAFE 状态,则 ROT 被拉低并关闭所有电源。
如果器件进入待机状态,LDO_μC 将关闭。
更多详细信息请参阅第 11 章State Machine状态机。
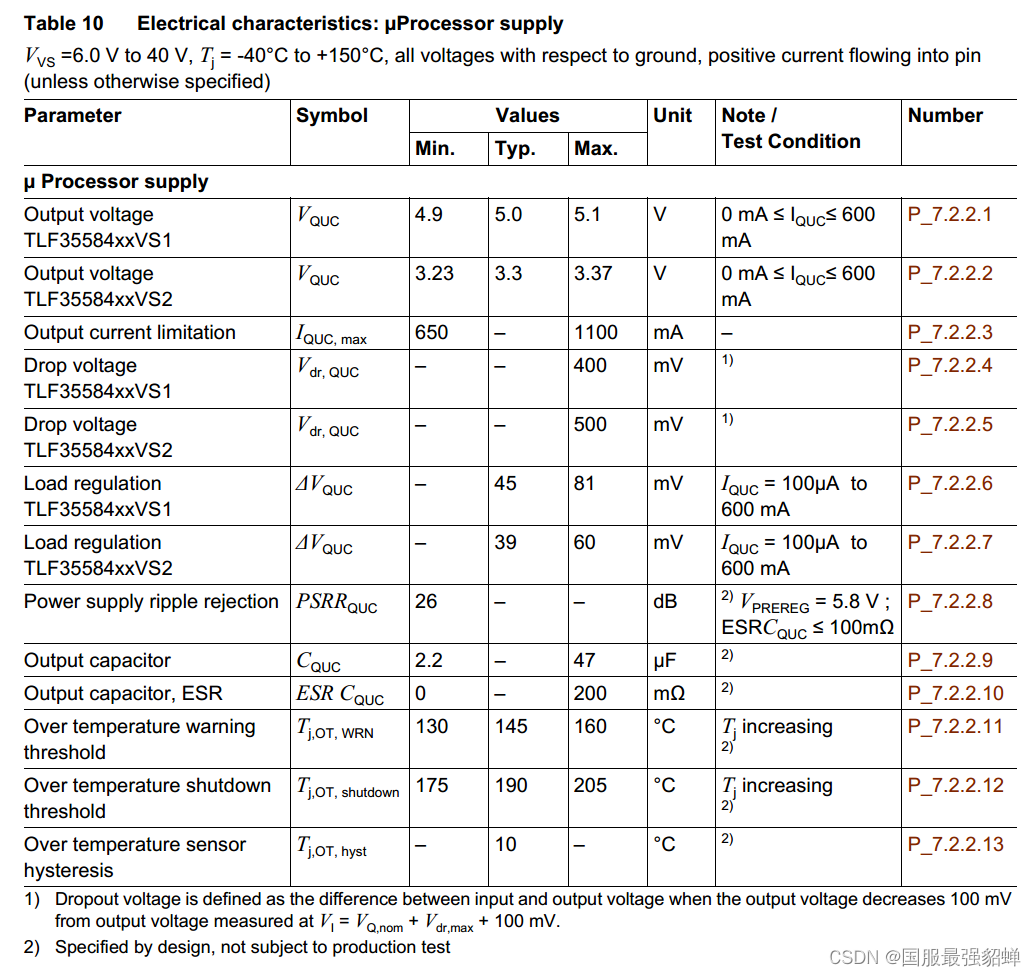
7.2.2 Electrical characteristics
输出电压 TLF35584xxVS1
输出电压 TLF35584xxVS2
输出电流限制
压降 TLF35584xxVS1
压降 TLF35584xxVS2
负载调节 TLF35584xxVS1
负载调节 TLF35584xxVS2
电源纹波抑制
输出电容
输出电容、ESR
超温警告阈值
过温关断阈值
过温传感器迟滞
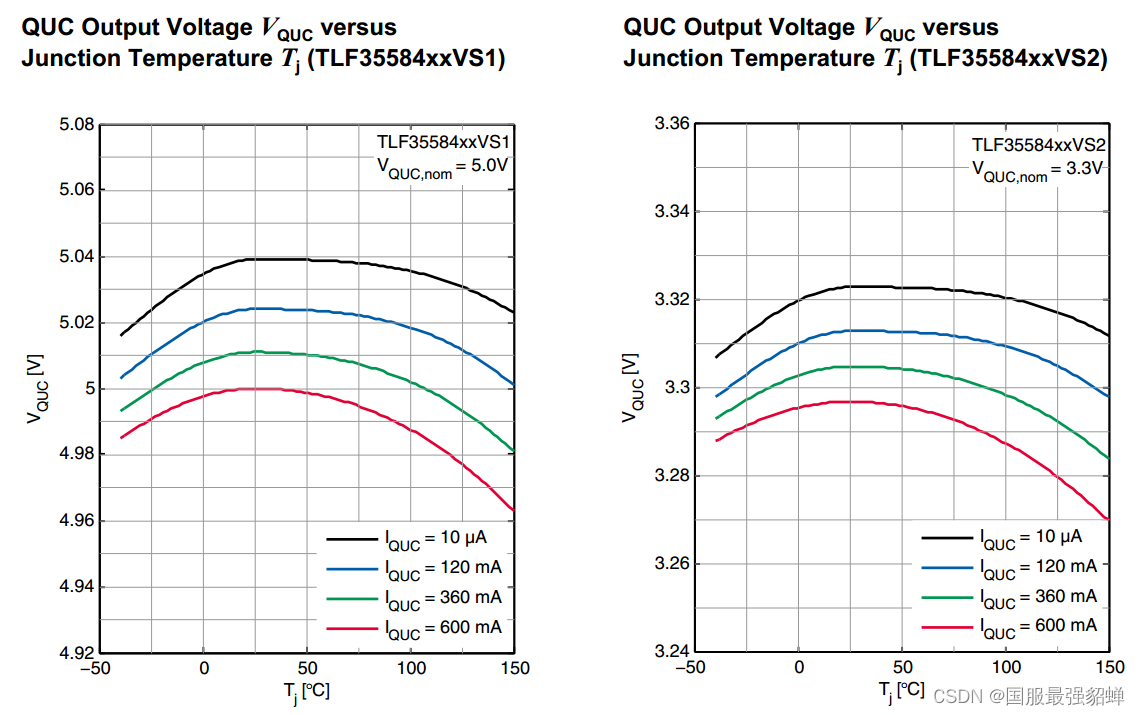
7.2.3 Typical Performance Characteristics
QUC 输出电压 VQUC 与结温 Tj (TLF35584xxVS1) , QUC 输出电压 VQUC 与结温 Tj (TLF35584xxVS2)
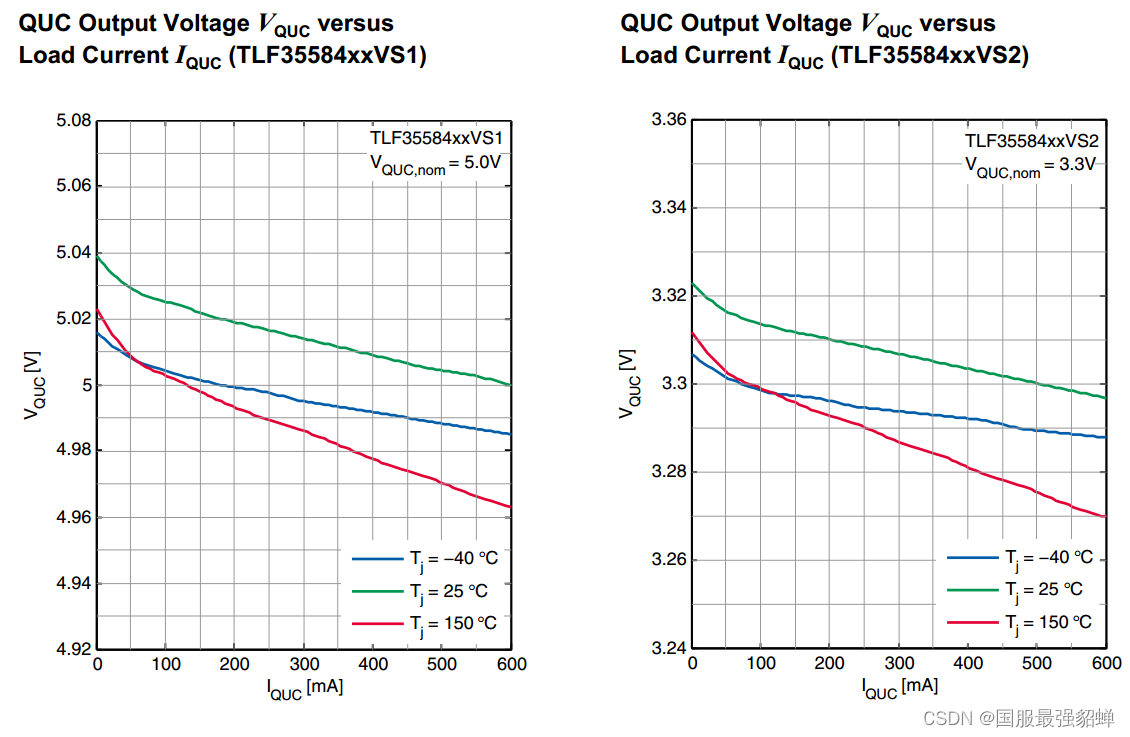
QUC 输出电压 VQUC 与负载电流 IQUC (TLF35584xxVS1) , QUC 输出电压 VQUC 与负载电流 IQUC (TLF35584xxVS2)
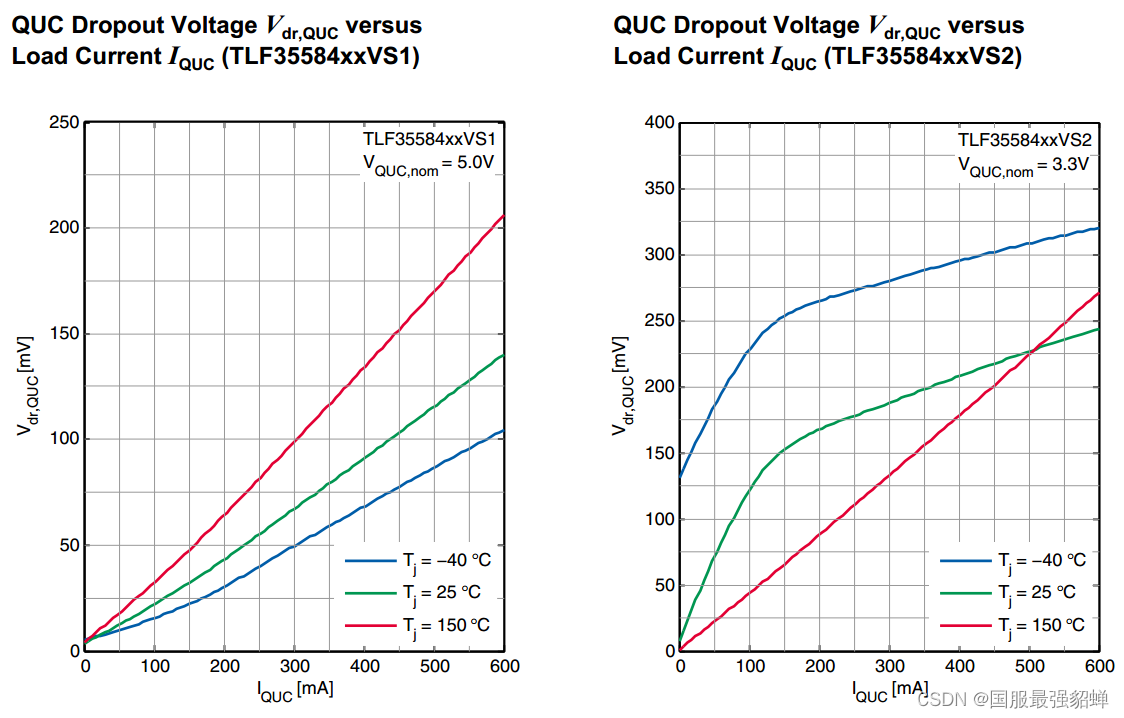
QUC 压差电压 Vdr,QUC 与负载电流 IQUC (TLF35584xxVS1) , QUC 压差电压 Vdr,QUC 与负载电流 IQUC (TLF35584xxVS2)
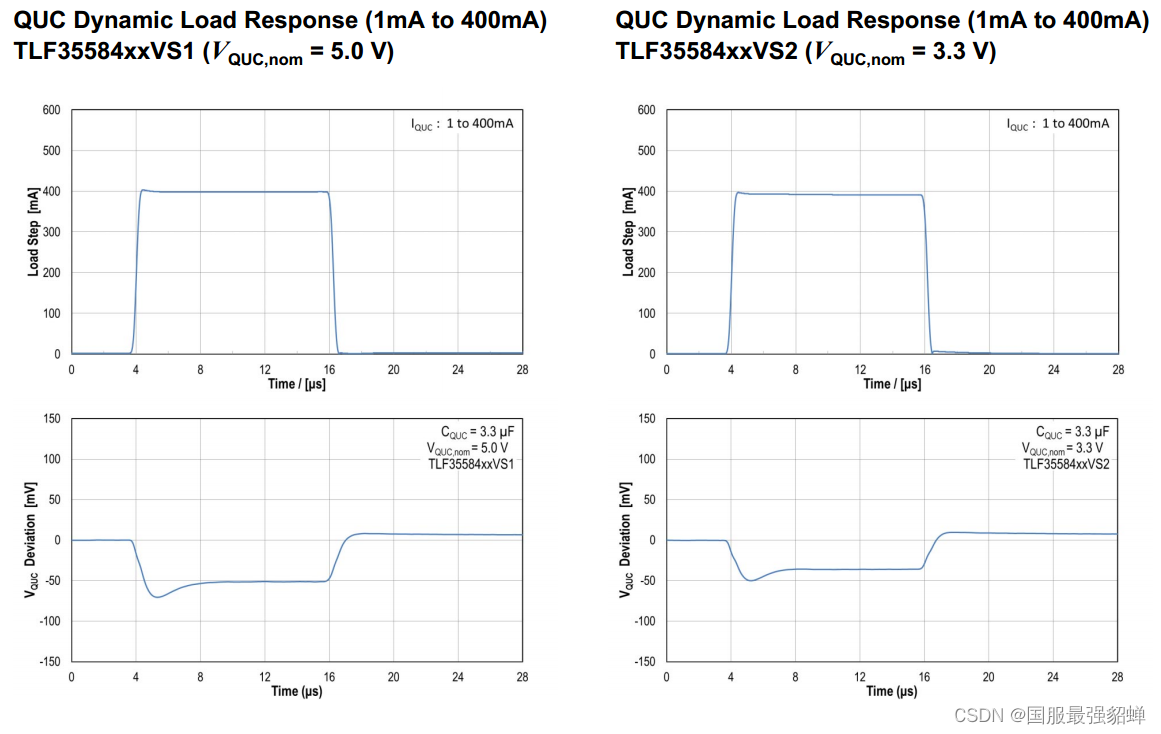
QUC 动态负载响应(1mA 至 400mA) TLF35584xxVS1(VQUC,标称 = 5.0V) , QUC 动态负载响应(1mA 至 400mA) TLF35584xxVS2(VQUC,标称 = 3.3V)
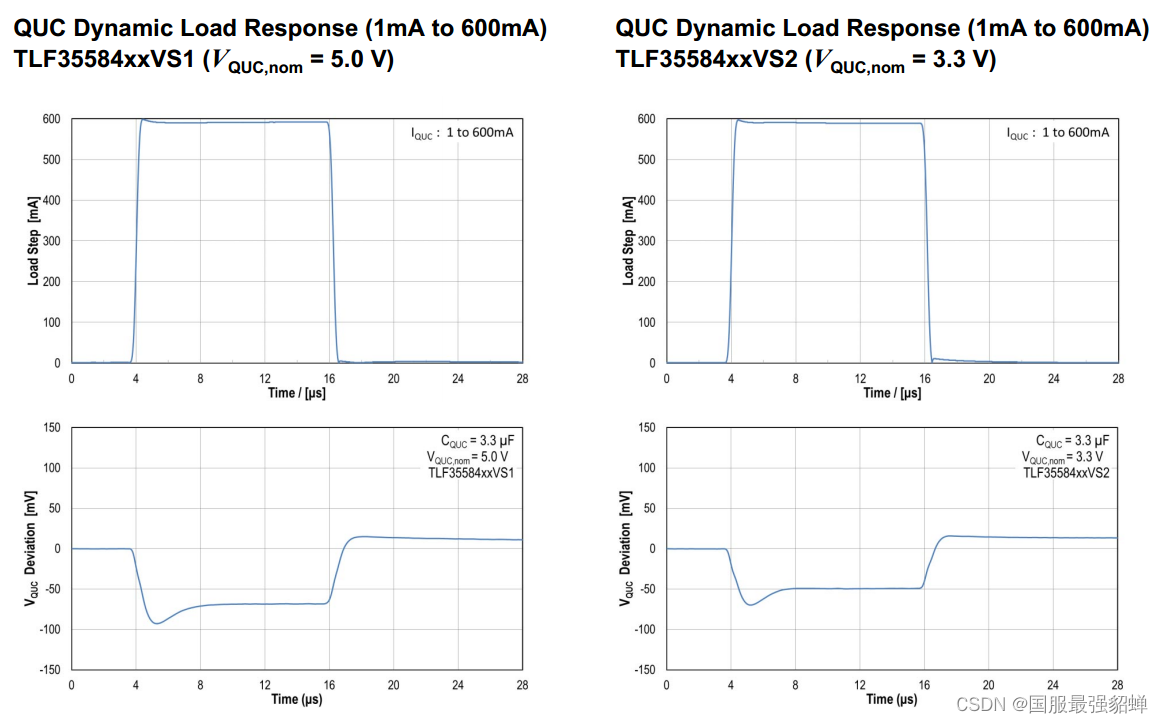
QUC Dynamic Load Response (1mA to 600mA) TLF35584xxVS1 (VQUC,nom = 5.0 V)
, QUC Dynamic Load Response (1mA to 600mA) TLF35584xxVS2 (VQUC,nom = 3.3 V)
7.3 Communication Supply QCO
7.3.1 Functional description
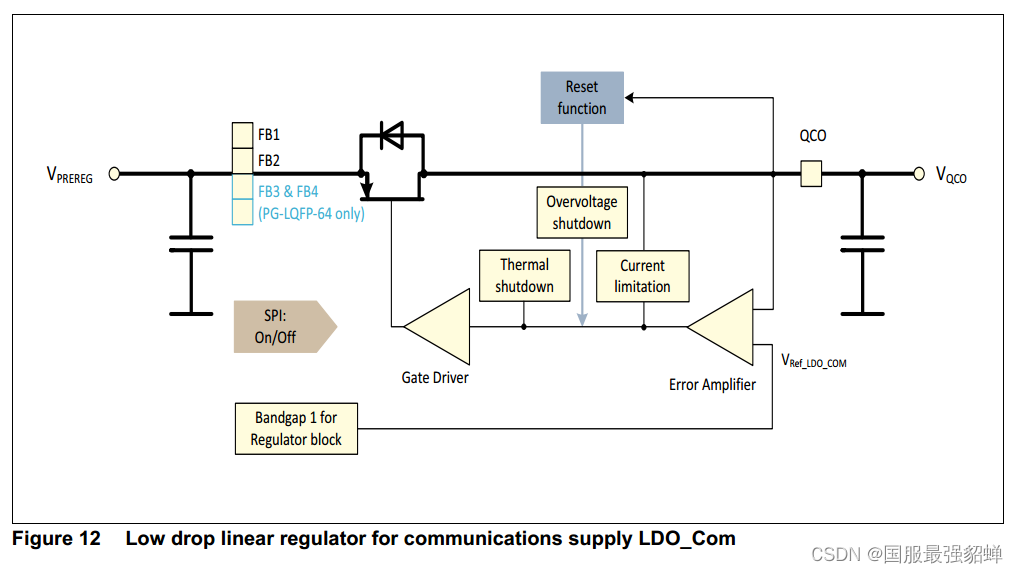
线性低压降稳压器 LDO_Com 为通信电源提供精确的 5.0 V 输出电压。
调节器由中间电路电压 VPREREG 供电,提供稳定电压。输出电压 VQCO(在 QCO 引脚)由误差放大器控制。将实际值与来自调节器带隙 1 的参考电压进行比较。控制环路的稳定性取决于负载电流、输出电容的特性和芯片温度。为确保稳定运行,应根据表 11“电气特性”中的规定要求(电容值和串联电阻 ESR)选择输出电容器。下图所示的输入电容是降压前置稳压器的输出滤波电容。
安装保护电路以防止稳压器和应用程序损坏:
• 为了保护LDO_Com 的传输元件免受过载影响,电流限制会将输出电流限制在指定的最大限值。电流感测通过电流镜完成,不使用感测电阻。当达到最大电流条件时,电流将被限制,因此输出电压将降低。调节器具有接地短路保护。
• 输出电压由电压监控器监控。如果 QCO 引脚过压,LDO_Com 将关闭,该事件将通过中断指示并存储在 SPI 状态寄存器 (MONSF1) 中。如果 QCO 引脚欠压,该事件将通过中断指示并存储在 SPI 状态寄存器 (MONSF2) 中。如果输出欠压,稳压器不会关闭,且输出欠压小于对地短路检测时间 tStG。如果欠压持续时间超过 tStG,稳压器将关闭。该事件将被存储在 SPI 状态寄存器(MONSF0)中,并且将生成中断。
• 该调节器有一个专用温度传感器。如果功率级温度超过预警阈值,中断将指示此事件,并将其存储在 SPI 状态寄存器 (OTWRNSF) 中。如果功率级温度超过温度关断阈值,该事件将存储在 SPI 状态寄存器 (OTFAIL) 中,稳压器将关闭并生成中断。
温度关闭后,LDO_Com 可通过 SPI 命令重新启用。
稳压器 LDO_Com 在待机和故障安全状态下关闭。在 INIT、SLEEP、NORMAL 和 WAKE 状态下,LDO_Com 的打开或关闭取决于 SPI 配置。
更多详细信息请参阅第 11 章状态机。
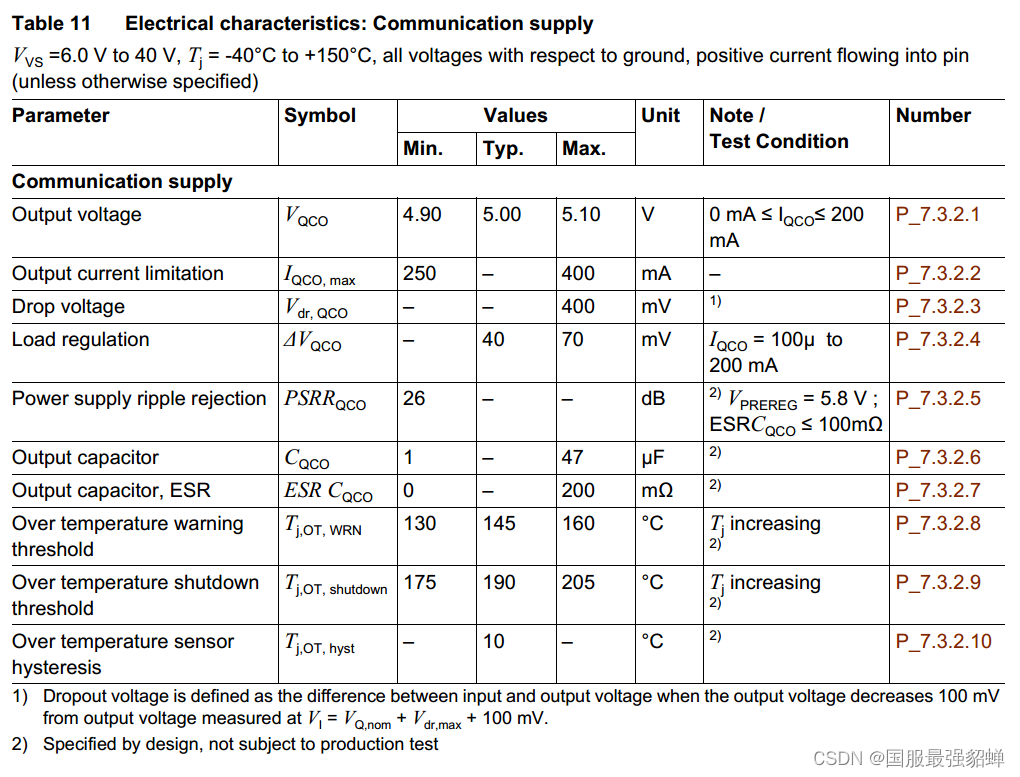
7.3.2 Electrical characteristics
输出电压
输出电流限制
电压降
负载调整率
电源纹波抑制
输出电容
输出电容、ESR
超温警告阈值
过温关断阈值
过温传感器迟滞
7.3.3 Typical Performance Characteristics
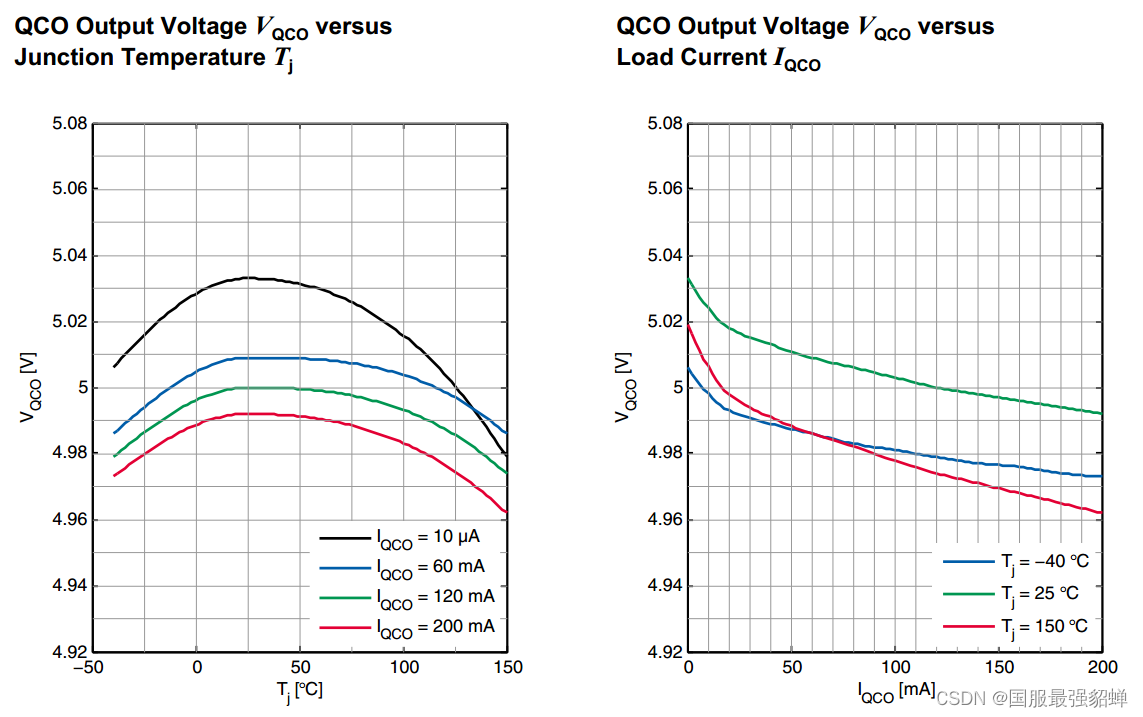
QCO 输出电压 VQCO 与结温 Tj , QCO 输出电压 VQCO 与负载电流 IQCO
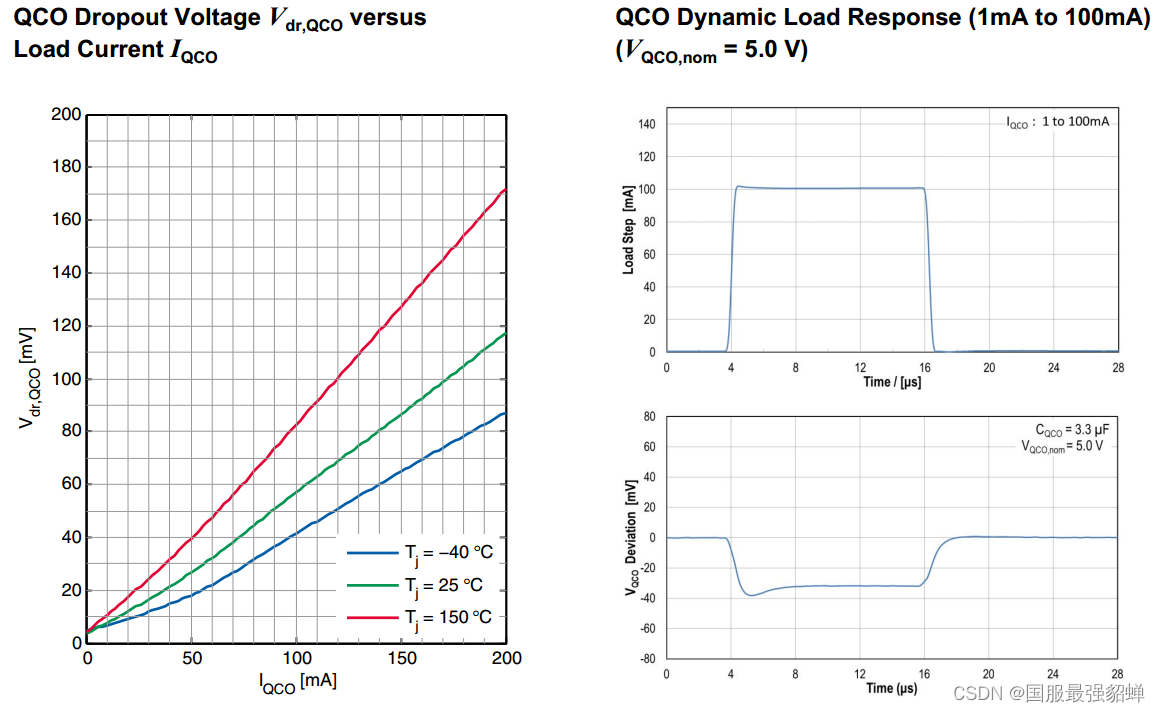
QCO 压差 Vdr,QCO 与负载电流 IQCO , QCO 动态负载响应(1mA 至 100mA)(VQCO,nom = 5.0 V)
7.4 Voltage Reference QVR
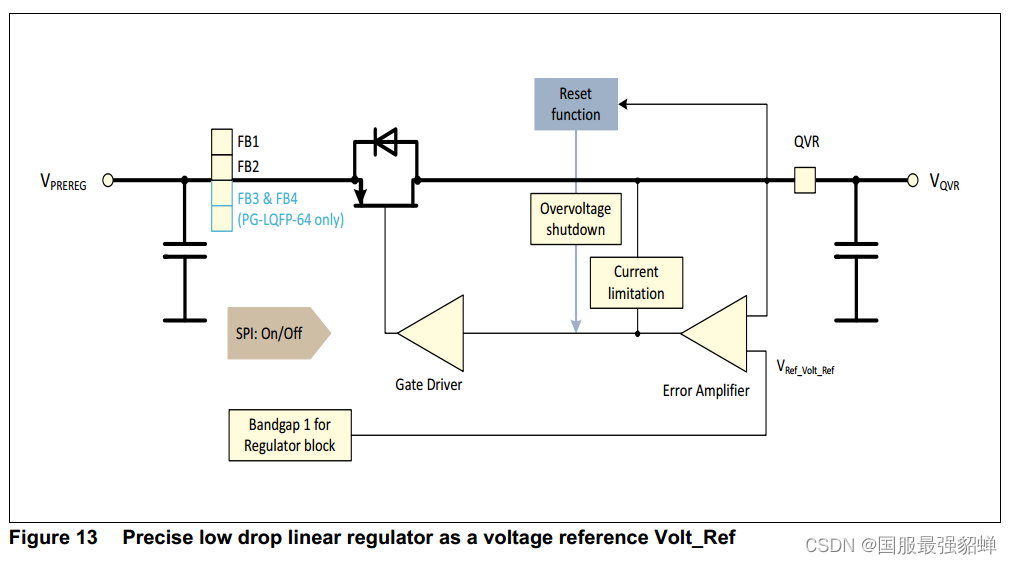
7.4.1 Functional description
线性低压降稳压器 Volt_Ref 提供高精度 5.0 V 输出电压作为电压基准。
调节器由中间电路电压 VPREREG 供电,提供稳定电压。引脚 QVR 的输出电压 VQVR 由误差放大器控制。将实际值与来自调节器带隙 1 的参考电压进行比较。控制环路的稳定性取决于负载电流、输出电容的特性和芯片温度。为确保稳定运行,应根据表 12“电气特性”中的规定要求(电容值和串联电阻 ESR)选择输出电容器。下图所示的输入电容是降压前置稳压器的输出滤波电容。
安装保护电路以防止稳压器和应用程序损坏:
• 为了保护Volt_Ref 的传输元件免受过载影响,电流限制会将输出电流限制在指定的最大限值。电流感测通过电流镜完成,不使用感测电阻。如果达到最大电流条件,电流将受到限制,因此输出电压将降低。调节器具有接地短路保护。
• 输出电压由电压监控器监控。如果 QVR 引脚过压,LDO Volt_Ref 将关闭,器件将进入 FAILSAFE 状态。该事件将存储在 SPI 状态寄存器 (MONSF1) 中。如果引脚 QVR 欠压,该事件将通过中断指示并存储在 SPI 状态寄存器 (MONSF2) 中。如果输出欠压,稳压器不会关闭,且输出欠压小于对地短路检测时间 tStG。如果欠压持续时间超过 tStG,稳压器将关闭。该事件将被存储在 SPI 状态寄存器(MONSF0)中,并且将生成中断。
• 该调节器没有专用的温度传感器。芯片上的温度由位于 LDO_μC 和降压预调节器的其他温度传感器感测。如果芯片温度超过预警阈值,中断将指示此事件,并将其存储在 SPI 状态寄存器 (OTWRNSF) 中。如果芯片温度超过温度关断阈值,稳压器将关闭。温度关闭时间至少为一秒。 LDO Volt_Ref 过载(检测到超过 1ms 的过流)将通过中断指示,并将其存储在 SPI 状态寄存器 (OTWRNSF) 中。
如果器件进入 FAILSAFE 状态,则 ROT 被拉低并关闭所有电源。
调节器 Volt_Ref 在待机和故障安全状态下关闭。在 INIT、SLEEP、NORMAL 和 WAKE 状态下,Volt_Ref 的打开或关闭取决于 SPI 配置。
更多详细信息请参阅第 11 章状态机。
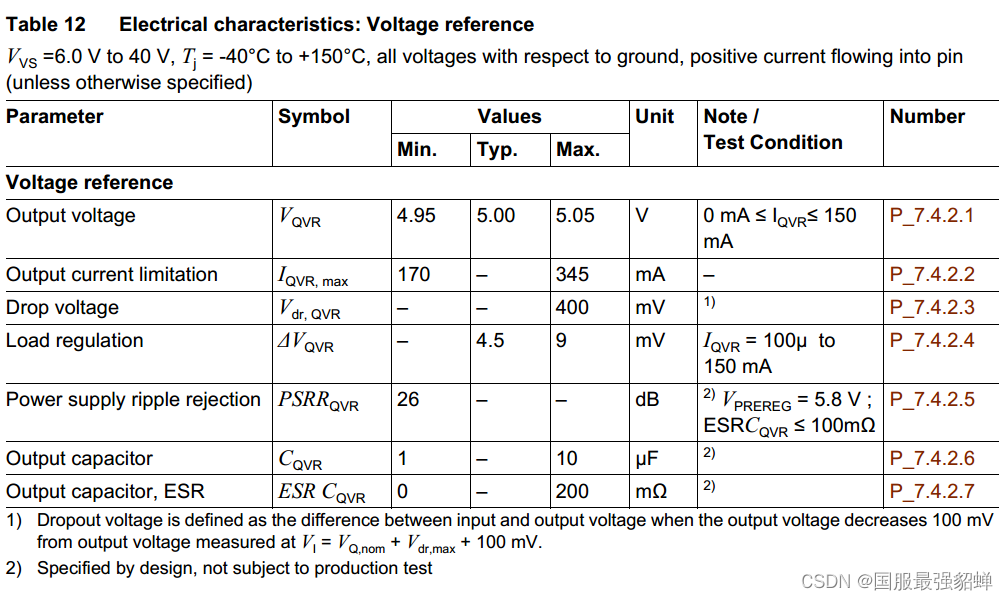
7.4.2 Electrical characteristics
输出电压
输出电流限制
电压降
负载调整率
电源纹波抑制
输出电容
输出电容、ESR
7.4.3 Typical Performance Characteristics
QVR 输出电压 VQVR 与结温 Tj , QVR 输出电压 VQVR 与负载电流 IQVR
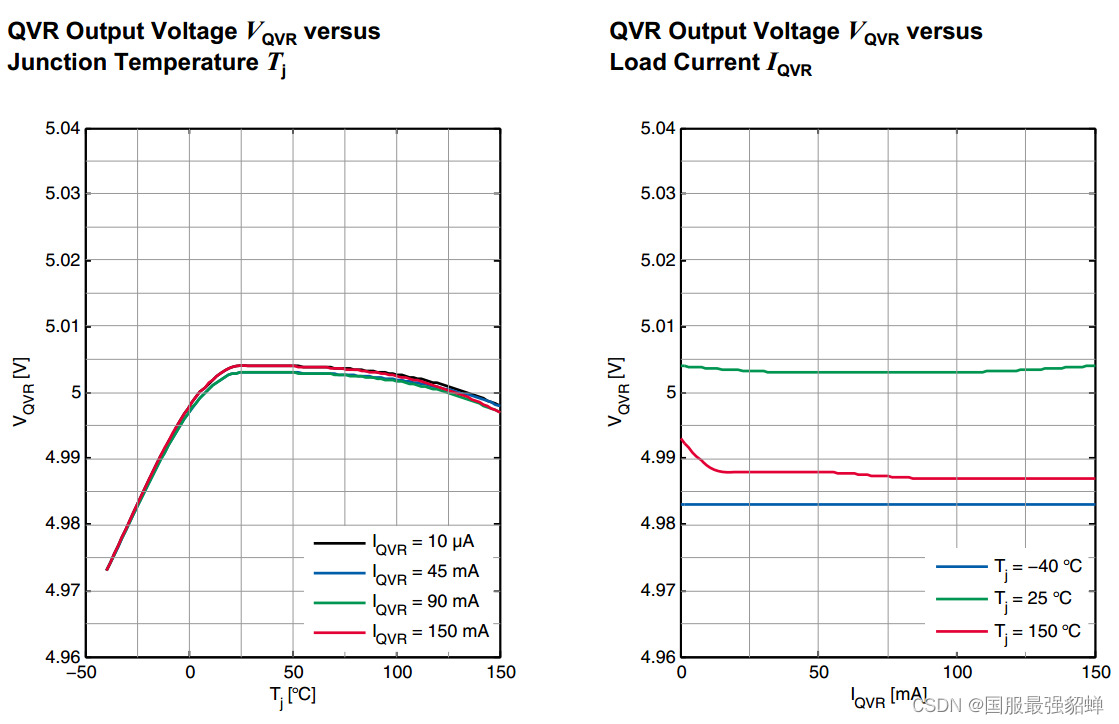
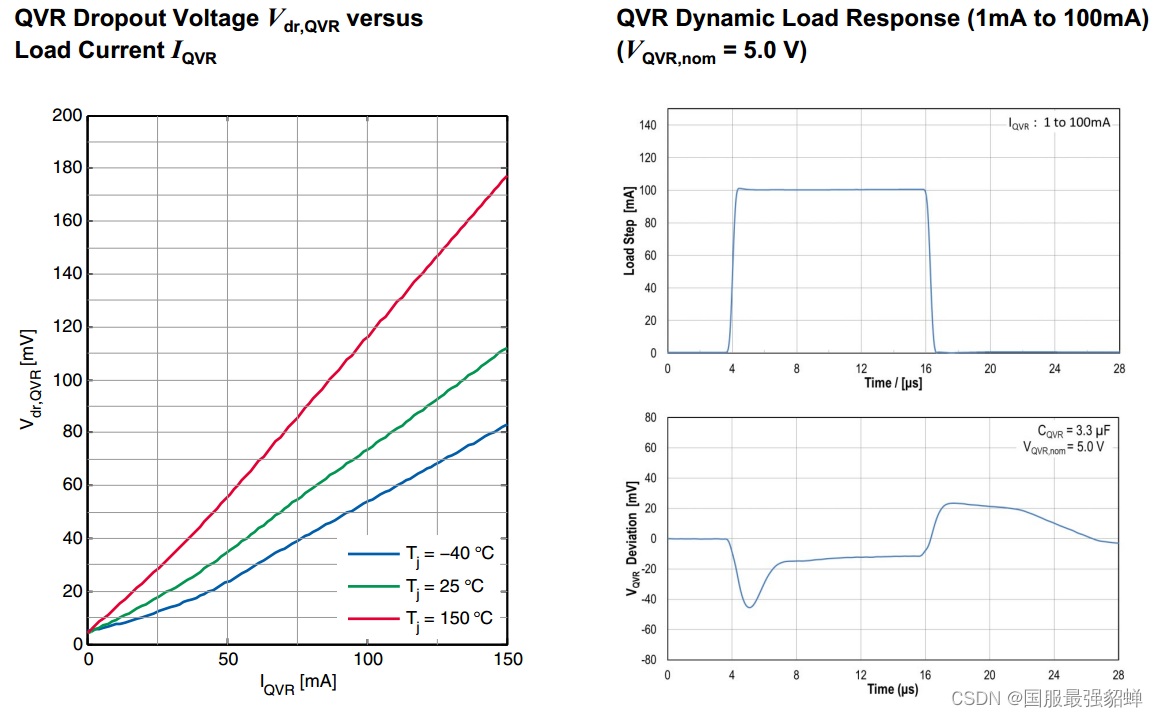
QVR 压差 Vdr,QVR 与负载电流 IQVR , QVR 动态负载响应(1mA 至 100mA)(VQVR,nom = 5.0 V)
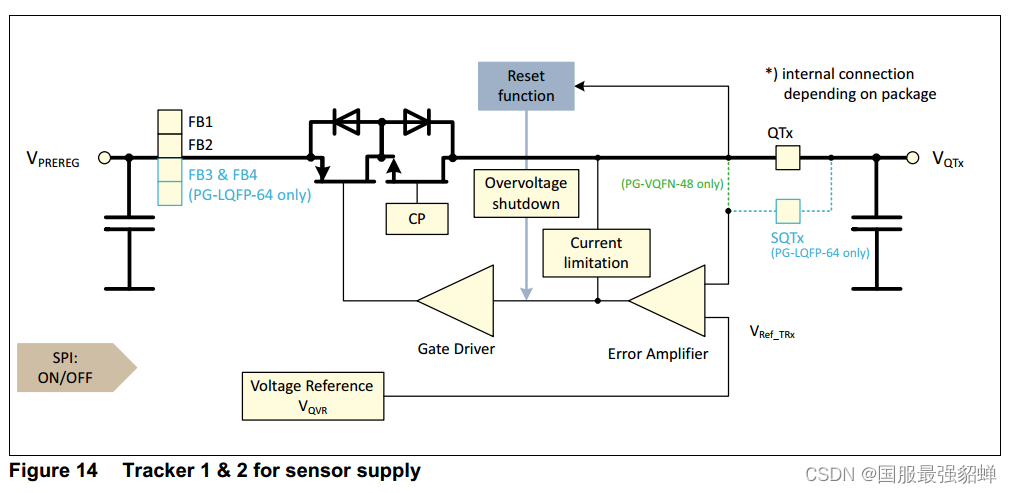
7.5 Tracker 1 & 2 QTx
7.5.1 Functional description
线性跟踪器 1 和 2 提供具有非常高精度的传感器电源,参考电压参考输出(引脚 QVR)。
两个跟踪器均由中间电路电压 VPREREG 供电,该电压提供稳定的电压。引脚 QTx 处的输出电压 VQTx 由误差放大器控制。实际值与引脚 QVR 处的参考电压 VQVR 提供的参考电压进行比较。跟踪器输出电压跟随 Volt_Ref 输出,但降幅非常小。控制环路的稳定性取决于负载电流、输出电容的特性和芯片温度。为了确保稳定运行,每个跟踪器的输出电容器应根据表 13“电气特性”中的指定要求(电容值和电气串联电阻 ESR)进行选择。下图所示的输入电容是降压前置稳压器的输出滤波电容。
安装保护电路是为了防止损坏跟踪器和应用程序: • 为了保护跟踪器的传输元件免受过载影响,电流限制会将输出电流限制在指定的最大限值。电流感测通过电流镜完成,不使用感测电阻。如果达到最大电流条件,电流将受到限制,因此输出电压将降低。跟踪器具有接地短路和电池电压短路保护。
• 输出电压由电压监控器监控。如果引脚 QTx 过压,相应的跟踪器将被关闭,该事件将被存储在 SPI 状态寄存器(MONSF1)中并产生中断。如果引脚 QTx 欠压,该事件将被存储在 SPI 状态寄存器 (MONSF2) 中并生成中断。输出欠压时跟踪器不会关闭,且小于对地短路检测时间 tStG。如果欠压持续时间超过 tStG,跟踪器将关闭。该事件将被存储在 SPI 状态寄存器(MONSF0)中,并且将生成中断。
• 跟踪器能够承受接地或电池电压短路而不会损坏。如果电池电压短路并且电池电压高于跟踪器过压阈值,则跟踪器将关闭,该事件将存储在 SPI 状态寄存器 (MONSF1) 中。
• 该调节器没有专用的温度传感器。芯片上的温度由位于 LDO_μC 和降压预调节器的其他温度传感器感测。如果芯片温度超过预警阈值,该事件将存储在 SPI 状态寄存器(OTWRNSF)中,并生成中断。如果芯片温度超过温度关闭阈值,跟踪器将关闭。温度关闭时间至少为一秒。
两个跟踪器均在“待机”和“故障安全”状态下关闭。在 INIT、NORMAL、SLEEP 和 WAKE 状态下,每个跟踪器根据 SPI 配置打开或关闭。
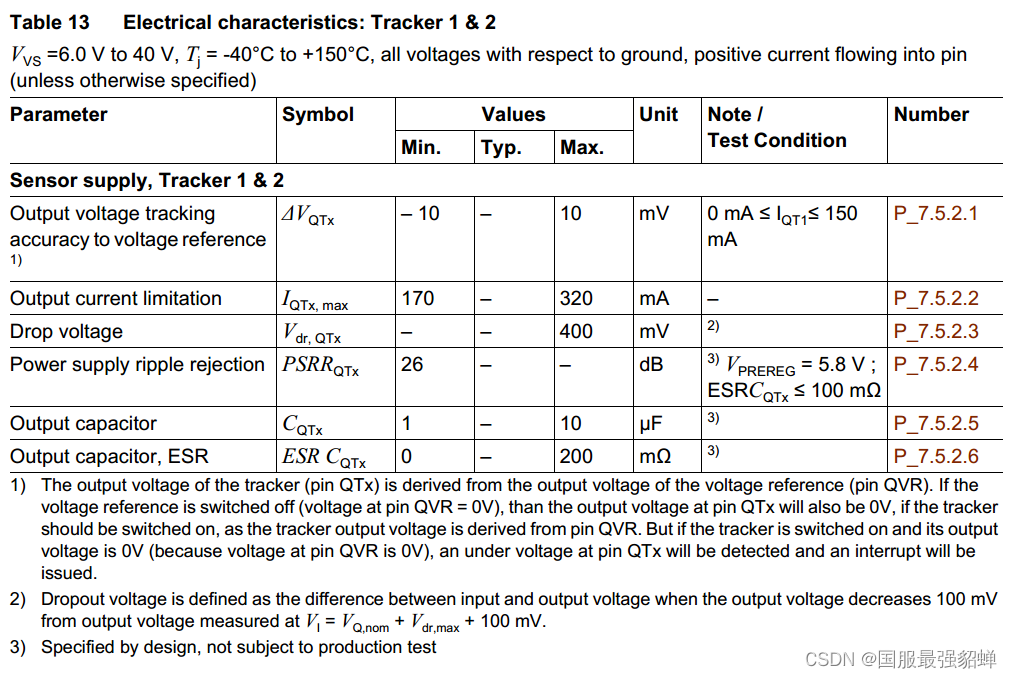
7.5.2 Electrical characteristics
传感器电源,跟踪器 1 和 2
输出电压对参考电压的跟踪精度
输出电流限制
电压降
电源纹波抑制
输出电容
输出电容、ESR
1 ) 跟踪器(引脚 QTx)的输出电压源自电压基准(引脚 QVR)的输出电压。如果参考电压关闭(引脚 QVR 处的电压 = 0V),则如果跟踪器应打开,则引脚 QTx 处的输出电压也将为 0V,因为跟踪器输出电压来自引脚 QVR。但如果跟踪器打开且输出电压为0V(因为QVR引脚电压为0V),则会检测到QTx引脚欠压并发出中断。
7.5.3 Typical Performance Characteristics
QTx 输出电压 VQTx 与结温 Tj , QTx 输出电压 VQTx 与负载电流 IQTx
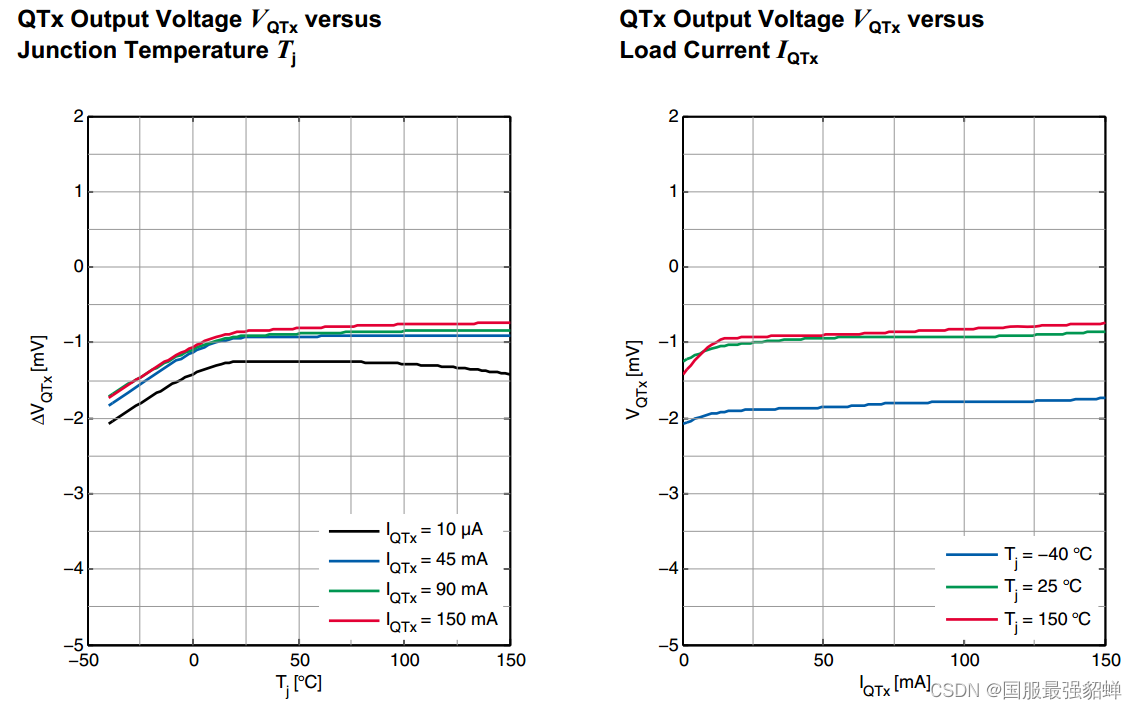
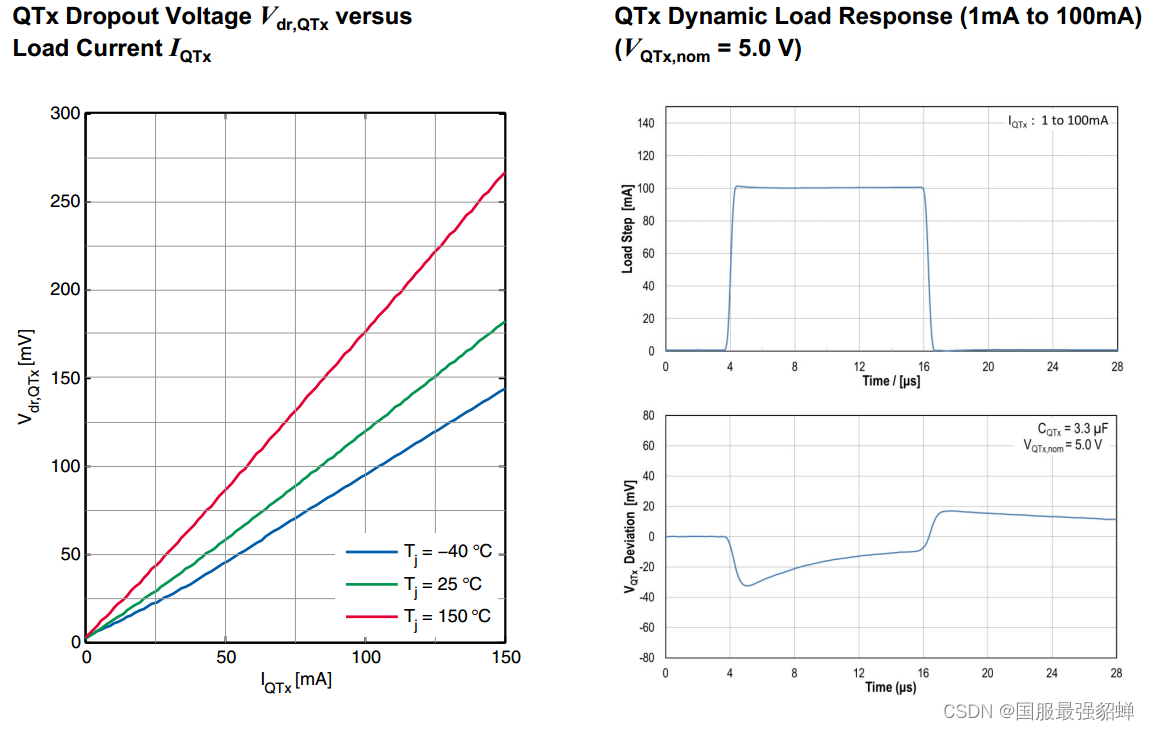
QTx 压差 Vdr,QTx 与负载电流 IQTx , QTx 动态负载响应 (1mA 至 100mA) (VQTx,nom = 5.0 V)
7.7 Power Sequencing
TLF35584 包括电源排序功能,以确保所有输出电压正确斜坡上升。
内部上电复位 (POR) 释放后,备用稳压器和预稳压器开始运行。
如果非微控制器相关电压之一(Volt_Ref、LDO_Com、Tracker1 或 Tracker2)无法斜坡上升(例如对 GND 短路),则停止上电时序,但在上电复位延迟时间后复位输出仍会释放trd。微控制器应通过读取 SPI 状态寄存器 (VMONSTAT) 检查输出状态。
如果微控制器在电源排序期间发送 SPI 请求以启用或禁用任何非微控制器相关的 LDO(Volt_Ref、LDO_Com、Tracker1 或 Tracker2),则序列将停止并执行请求的配置。
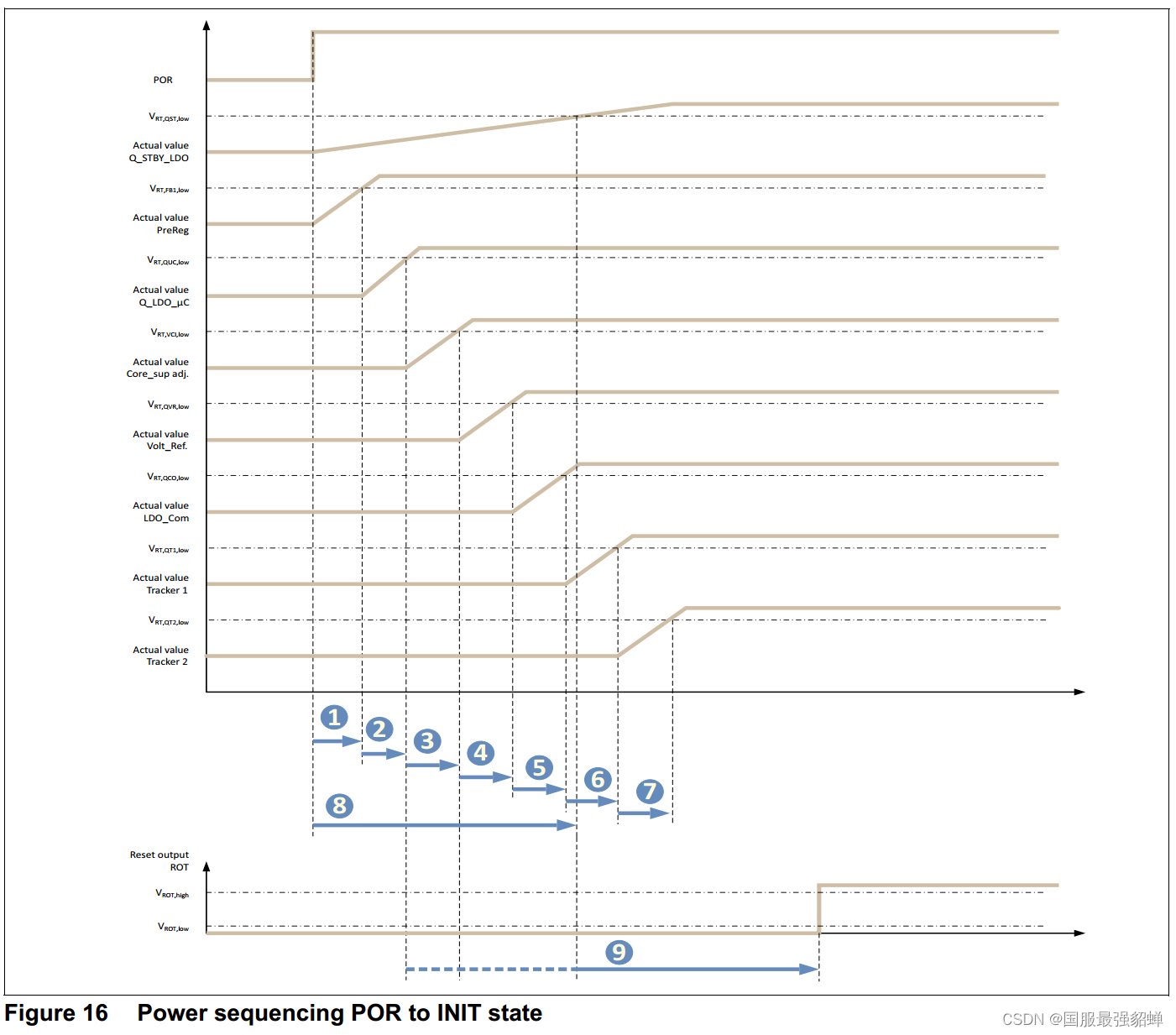
7.7.1 Power sequencing from POR to INIT state
-
POR 释放后,备用稳压器和预稳压器开始工作。
-
当 VFB 高于复位阈值下限 VRT,FB,low 时,LDO_µC 开始工作。
-
当 VQUC 高于复位阈值下限 VRT,QUC,low 时,将启用外部内核电源(如果选择)。如果未选择外部内核供电,则电压参考 LDO 开始工作。
-
如果选择外部内核供电且 VVCI 高于复位阈值下限 VRT,VCI,low,则电压参考 LDO 开始工作。
-
当 VQVR 高于复位阈值下限 VRT,QVR,low 时,LDO_Com 开始工作。
-
当 VQCO 高于复位阈值下限 VRT,QCO,low 时,跟踪器 1 开始运行。
-
当 VQT1 高于复位阈值下限 VRT,QTx,low 时,跟踪器 2 开始运行。
-
这是从启用备用稳压器到其输出 VQST 高于下复位阈值 VRT,QST,low 的时间。
-
复位延迟时间 tRD 在 LDO_STBY、LDO_μC 和外部内核电源(如果选择)达到其复位阈值下限 VRT,x,low 后开始。复位延迟时间可通过 SPI 进行编程。休息延迟时间结束后,ROT 引脚被拉至高电平。该图显示了 tRD 启动时间的可能性。
一旦 ROT 为高电平,微控制器就可以更改可选 LDO 的配置,这可能会相应地改变电源排序。
7.7.2 Power sequencing STANDBY to INIT state
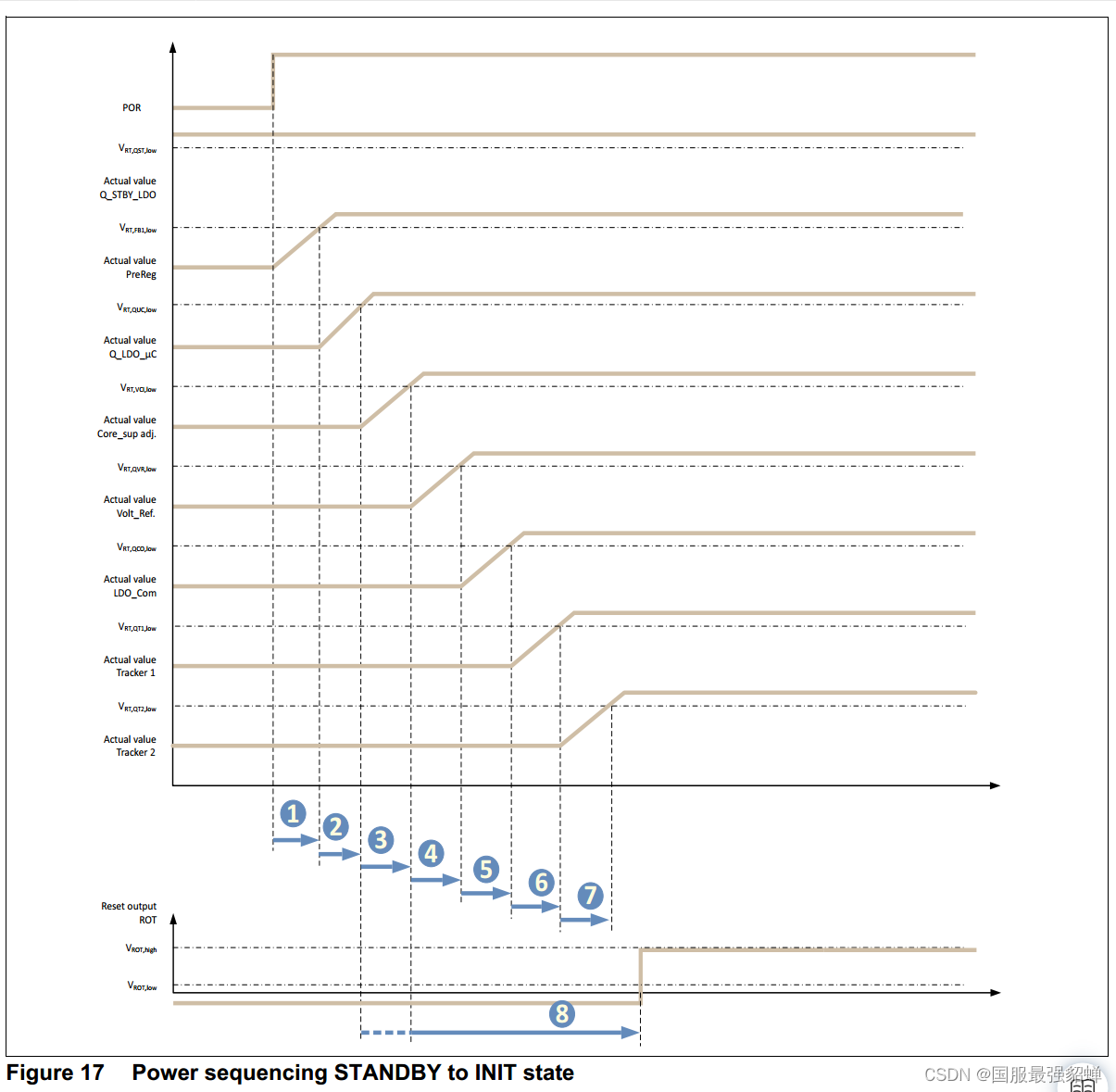
说明: 输入电压存在,器件处于待机状态,LDO_STBY 处于活动状态。
-
在有效的唤醒信号或唤醒定时器到期后,预调节器开始运行。
-
当 VFB 高于复位阈值下限 VRT,FB,low 时,LDO_µC 开始工作。
-
当 VQUC 高于复位阈值下限 VRT,QUC,low 时,将启用外部内核电源(如果选择)。如果未选择外部内核供电,则电压参考 LDO 开始工作。
-
如果选择外部内核供电且 VVCI 高于复位阈值下限 VRT,VCI,low,则电压参考 LDO 开始工作。
-
当 VQVR 高于复位阈值下限 VRT,QVR,low 时,LDO_Com 开始工作。
-
当 VQCO 高于复位阈值下限 VRT,QCO,low 时,跟踪器 1 开始运行。
-
当 VQT1 高于复位阈值下限 VRT,QTx,low 时,跟踪器 2 开始运行。
-
复位延迟时间 tRD 在 LDO_µC 和外部内核电源(如果选择)达到其复位阈值下限 VRT,x,low 后开始。复位延迟时间可通过 SPI 进行编程。休息延迟时间结束后,ROT 引脚被拉至高电平。该图显示了 tRD 启动时间的可能性。
7.7.3 Power sequencing SLEEP to WAKE state
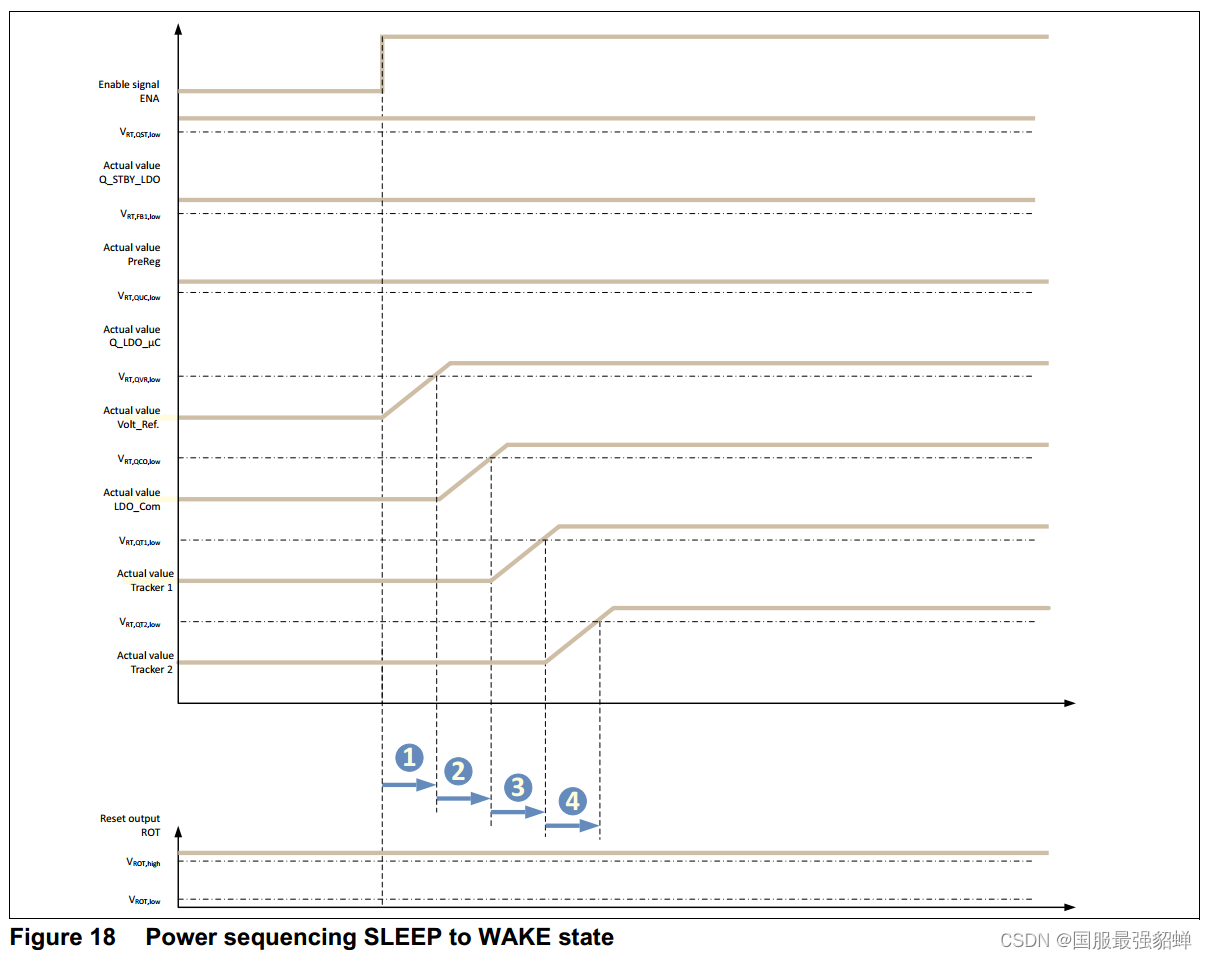
说明:存在输入电压,器件处于休眠状态,所有可选 LDO 在休眠状态下关闭,所有可选 LDO 在之前的正常状态下打开: 1. 在有效唤醒信号或唤醒定时器到期后,电压参考开始运行。
-
当 VQVR 高于复位阈值下限 VRT,QVR,low 时,LDO_Com 开始工作。
-
当 VQCO 高于复位阈值下限 VRT,QCO,low 时,跟踪器 1 开始工作。
-
当 VQT1 高于复位阈值下限 VRT,QTx,low 时,跟踪器 2 开始运行。
复位输出 ROT 在 SLEEP 状态下为高电平,在 WAKE 状态下保持为高电平。
如果可选 LDO 在之前的正常状态下关闭,则在从睡眠状态转换到唤醒状态期间不会启用该 LDO,电源排序将跟进下一个 LDO。如果 LDO 在 SLEEP 状态期间启用并在之前的 NORMAL 状态下启用,则它将保持启用状态。
8 Monitoring Function
8.1 Introduction
TLF35584 包括所有输出电压的独立电压监控功能,包括用于 µC 内核电源的可选外部后置稳压器(如果使用)。
监控功能由每个输出电压的两个比较器组成。一种用于检测过压,另一种用于检测欠压。两个比较器都从仅用于电压监控块的独立带隙获取参考值。该带隙与电压调节器带隙无关。带隙为过压检测(高压复位阈值 VRT,xxx,high)和欠压检测(低压复位阈值 VRT,xxx,low)提供参考值。在正常工作条件下,相关调节器的输出电压必须保持在由上限 VRT,xxx,high 和下限 VRT,xxx,low 定义的电压窗口内。
监控块有专用的温度传感器。如果功率级温度超过温度关断阈值,器件将进入 FAILSAFE 状态,稳压器将关闭,并且事件将存储在 SPI 状态寄存器 (OTFAIL) 中。由于温度关闭而导致的关闭时间至少为一秒
特性:
过压和欠压比较器的行为如下:
• 每个稳压器的上限VRT,xxx,high 和下限VRT,xxx,low 都是固定的,不能通过SPI 命令进行编程或更改。
• 如果稳压器输出电压高于相关过压复位阈值VRT,xxx,high 且持续时间超过复位反应时间tRR,则将检测到过压。高于相关过压复位阈值 VRT,xxx,high 且持续时间短于复位反应时间 tRR 的过压将被视为尖峰并且不会被检测到。
如果稳压器输出电压低于相关欠压复位阈值 VRT,xxx,low 的时间超过复位反应时间 tRR,则将检测到欠压。低于相关欠压复位阈值 VRT,xxx,low 且持续时间短于复位反应时间 tRR 的欠压将被视为尖峰并且不会被检测到。
• 在欠压和过压情况下,复位反应时间tRR 对于内部电源无效。
• 检测到过电压将立即关闭相关调节器,以保护负载免受伤害或破坏。此关闭可能会导致(取决于受影响的调节器)采取进一步的操作,请参阅状态机一章了解详细信息。
• 检测到欠压不会关闭相关调节器。
• 后置稳压器(包括用于μC 内核电源的可选外部后置稳压器)具有接地短路检测功能。如果检测到的欠压持续时间超过对地短路检测时间 tStG,相关稳压器将关闭以保护自身和芯片免于过热。此关闭可能会导致(取决于受影响的调节器)采取进一步的操作,请参阅状态机一章了解详细信息。 (μC 内核电源的外部后置调节器必须具有启用或禁止功能)。
• 仅当相关稳压器正在使用(包括用于μC 内核电源的外部后置稳压器)并打开时,过压和欠压检测才会激活。
过压和欠压指示:
根据相关稳压器的不同,过压和欠压指示会有所不同,无论是通过复位信号还是通过中断指示: • 每次过压和欠压检测都将存储在 SPI 状态寄存器(MONSF0、 MONSF1、MONSF2)。
• 对于μC 相关的输出电压(VQST、VQUC、VVCI),过压和欠压由硬件复位引脚ROT 指示。如果出现过压或欠压,引脚 ROT 会被拉至低电平。
• 如果μC 内核电源的外部后置调节器出现过压或检测到接地短路,则引脚EVC 将被拉至低电平以关闭调节器。
• 对于预调节器输出(VFB) 和电压参考输出(VQVR),硬件复位引脚ROT 仅指示过压。如果发生过压,引脚 ROT 被拉至低电平。
• 对于预调节器输出和电压参考输出,仅通过中断指示欠压。
• 对于所有与μC 无关的输出电压(VQCO、VQT1、VQT2),过压和欠压均由中断指示。
• 对于内部电源电压,过压和欠压由硬件复位引脚ROT 指示。如果出现过压或欠压,引脚 ROT 会被拉至低电平。
本介绍是一个概述,详细内容请参阅以下子章节。
8.2 Shutdown Function 关断功能
预调节器输出处的短路接地检测时间 tStG 仅在 INIT 状态的上电序列期间有效。如果预调节器的输出电压在一定时间范围内不在规定范围内,设备将进入故障安全状态。一旦 VPREREG,BUCK 在首次超过其 UV 阈值后处于有效范围内(根据第 7.7 章中描述的电源排序完成步骤 1),将不会对检测到的接地短路做出反应。如果在其他情况下前置稳压器的输出电压太低,则器件的行为将取决于后置稳压器的电压监控。
在输出电压 VQUC、VVCI、VQST、VQVR 或 VFB 处检测到过压将关闭所有稳压器,以保护负载免受伤害或破坏,并将设备移至故障安全状态。
在输出电压 VQCO、VQT1 和 VQT2 处检测到过压将关闭相关调节器,以保护负载免受损坏或破坏,并生成中断事件。
如果在输出电压 VQUC、VVCI 或 VQST 处检测到的欠压持续时间超过接地短路检测时间 tStG,则所有稳压器将关闭以保护自身和芯片免遭过热,并将器件移至故障安全状态。
如果在输出电压 VQVR、VQCO、VQT1 或 VQT2 处检测到的欠压持续时间超过对地短路检测时间 tStG,相关稳压器将关闭以保护自身和芯片免于过热并产生中断事件。
8.3 Reset Function 复位功能
一旦内部POR 被释放,复位发生器就开始工作。
区分“软重置”和“硬重置”
如果引脚 ROT 低于 VROT,low,但前置和后置稳压器输出电压未关闭,则称为“软复位”。
如果引脚 ROT 低于 VROT,low 并且后置稳压器输出电压关闭,则称为“硬重置”。延迟 tSDT 后将重新启动上电排序。(适用于连续第二次初始化超时)
安全状态控制触发事件
安全状态控制功能连接到监控块。如果检测到安全状态控制触发事件,安全状态控制输出引脚(SS1 和 SS2)和 ROT 将被拉至接地。安全状态控制触发事件将存储在 SPI 寄存器中(SYSFAIL、INITERR、MONSF1、MONSF2、MONSF3 或 OTFAIL 中的相应位)。安全状态信号SS1的触发条件请参见 Safe State Control Function 安全状态控制功能 一章。
复位输出引脚
复位输出引脚ROT为开漏结构。一旦发生复位条件,ROT 引脚就会被拉至 VROT,低电平以下。内部上拉电流将输出拉向 VQUC。
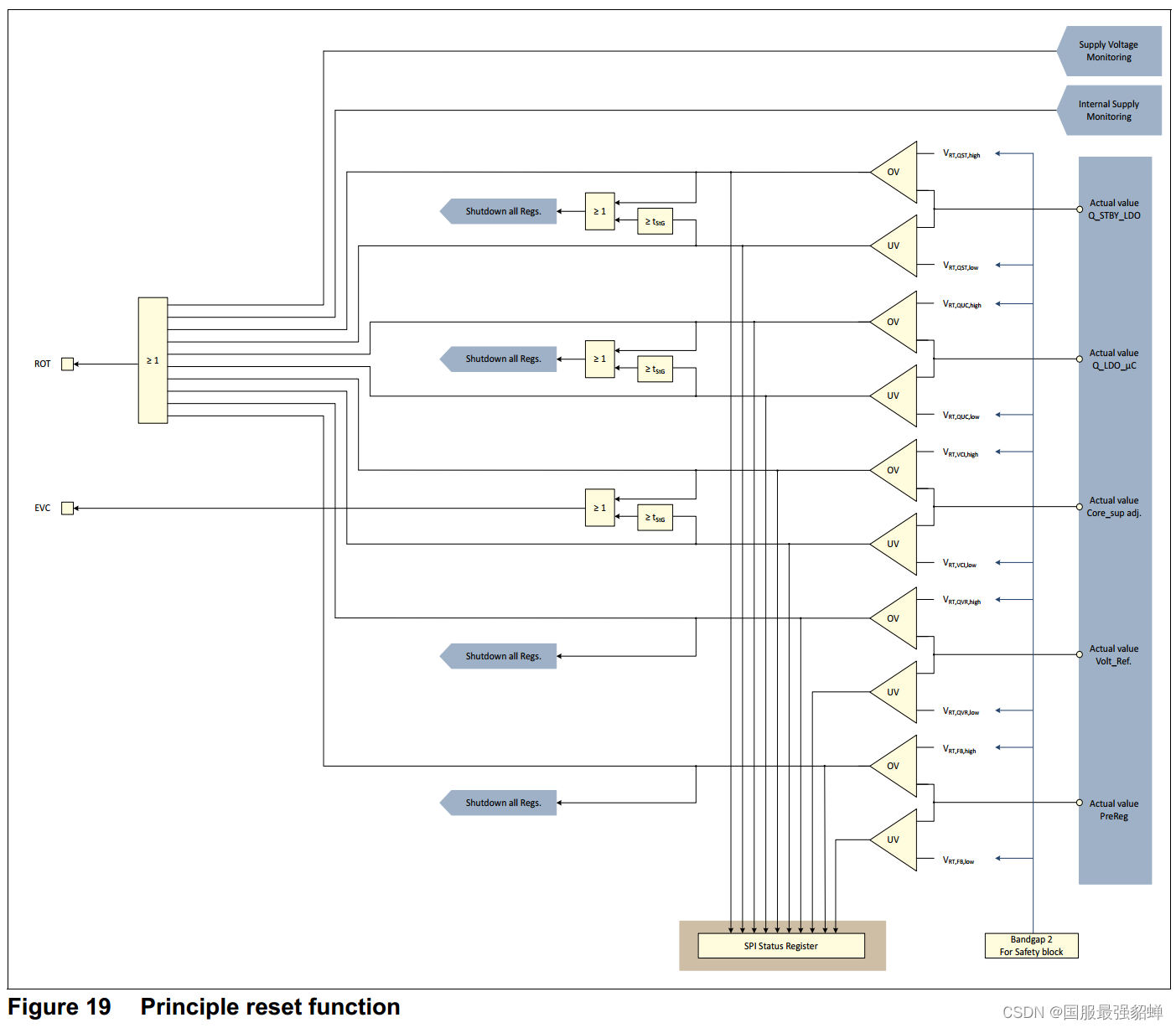
复位功能的详细说明(图 19):
以下稳压器有助于复位功能:
• 内部电源监控(外部不可见)
• 备用稳压器 (Q_STBY_LDO):VQST
• 用于为 µC 供电的 LDO (Q_LDO_µC):VQUC
• µC 内核电源的外部后置稳压器(Core_sup adj.):VVCI
• 参考电压(Volt_Ref.):VQVR - 仅过压,不欠压,不接地短路
• 前置稳压器(PreReg.):VFB -仅过压,不欠压
这些输出的实际值直接在输出引脚处获取,并由每个稳压器的两个比较器进行监控,一个用于过压(称为 OV),另一个用于欠压(称为 UV)。参考值VRT,XXX,high和VRT,XXX,low由仅与监控功能相关的独立带隙2提供。
过压和欠压事件的“内部电源电压调节器监控”以及 IBIAS 监控有助于触发复位。如果一个或两个内部电源电压超出其规定的范围,则无法再保证设备的正常功能。 IBIAS 监视器故障存储在状态位(BIASHI 或 BIASLOW)中。内部电源故障将触发“Move to Powerdown”事件(详细信息请参阅状态机章节)。
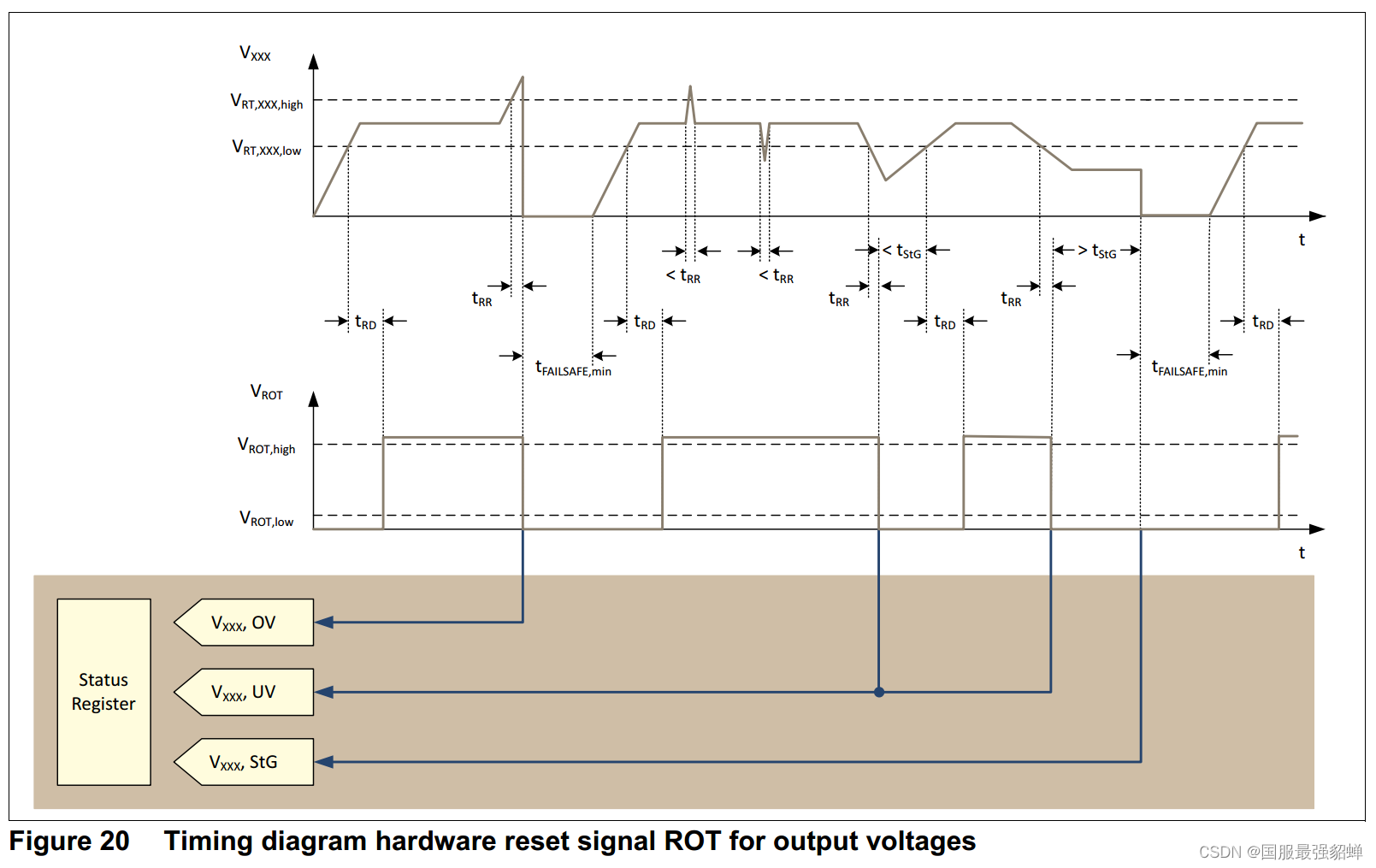
说明:
• VXXX = 由复位发生器监控的输出电压:VQUC、VVCI、VQST、VQVR 或 VFB
• VRT,XXX,high= 过压复位阈值:VRT,QUC,high, VRT,VCI,high, VRT,QST,high , VRT,QVR,high 或 VRT,FB,high
• VRT,XXX,low= 欠压复位阈值:VRT,VCI,low, VRT,QUC,low 或 VRT,QST,low
• tRD = 复位延迟时间,可调SPI 命令
• tRR = 复位反应时间,检测到过压和将 ROT 拉至低电平之间的时间
• < tRR = 不可检测,因为短于复位反应时间
• > tStG = 接地短路检测时间,欠压后的时间被视为接地短路
• tFAILSAFE,min = 系统关闭时间(FAILSAFE),将 ROT 拉低至器件重启之间的时间,详细信息请参阅状态机章节
• VROT = 硬件复位信号,ROT
• VROT,high = 硬件复位信号,高电平
• VROT,low = 硬件复位信号,低电平
• VXXX,OV = 检测到 VXXX 过压并存储在 SPI 寄存器(MONSF1)
• VXXX,UV = 检测到 VXXX 欠压并存储在 SPI 寄存器(MONSF2)
• VXXX,StG = VXXX 检测到接地短路并存储在 SPI 寄存器 (MONSF0) 中
• 也适用于有助于复位功能的偏置电流违规、电源过压 (MONSF3)、温度关断 (OTFAIL)。请参考图43和图50
8.4 Interrupt Function 中断功能
一旦内部 POR 释放,中断发生器就开始运行。
电压监控功能监控与 µC 无关的后置稳压器输出电压 VQCO、VQT1 和 VQT2、前置稳压器输出电压 VFB(仅欠压)和电压参考输出 VQVR(仅欠压和接地短路)的值。结果写入 SPI 状态寄存器(IF 和 MONSF0、MONSF1 或 MONSF2)并通过中断(引脚 INT)指示。所有这些监控信号的连接是逻辑“或”。
中断引脚INT不仅指示电压监控的结果,还指示由于器件中的其他事件而产生的中断。
中断输出引脚
中断输出引脚INT为推挽结构。通过将 INT 引脚拉至地来指示中断。
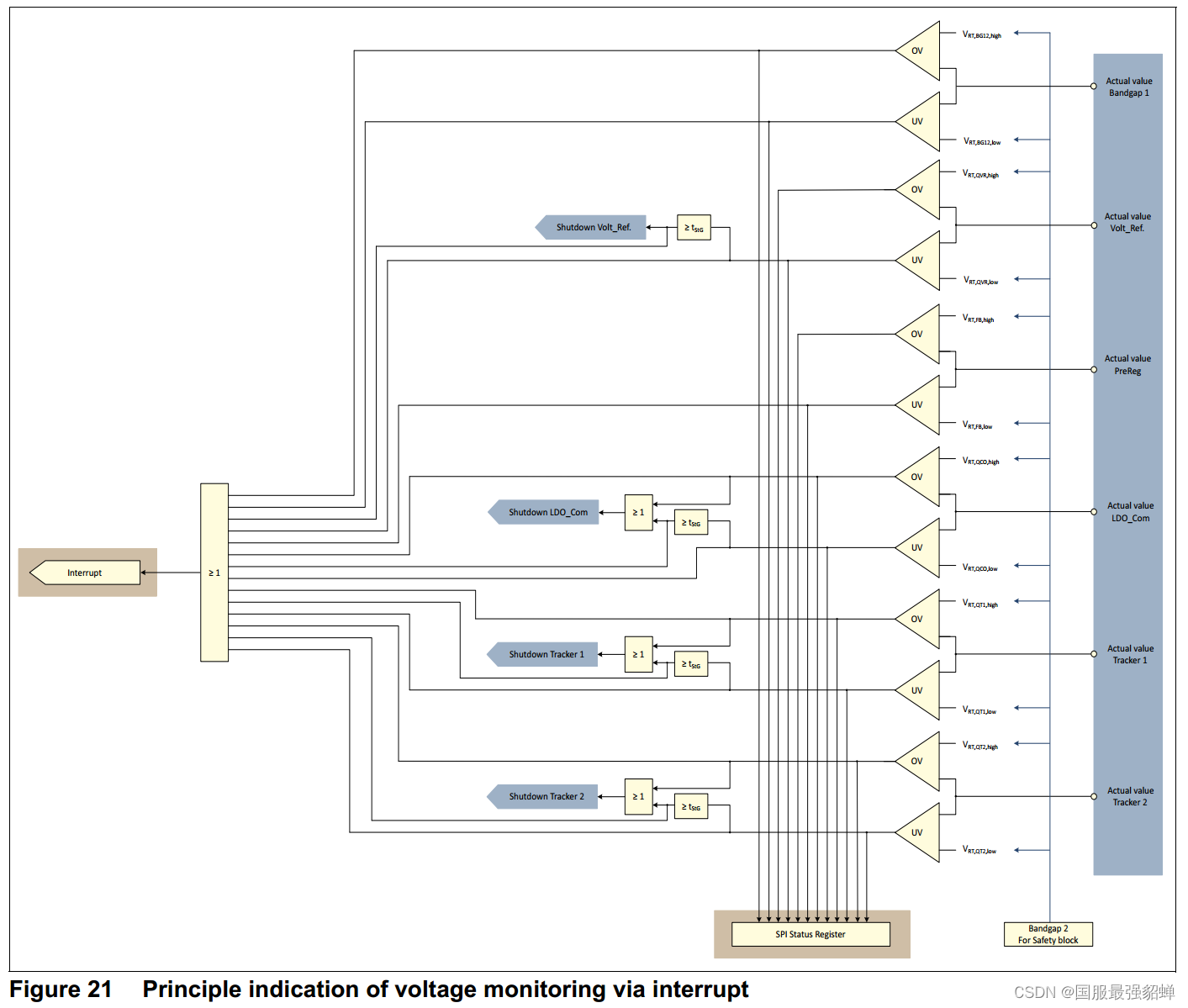
通过中断功能进行电压监控的详细说明(图21):
以下稳压器通过中断功能有助于电压监控:
• 预稳压器 (PreReg.):VFB,刚好欠压
• 参考电压 (Volt_Ref.):VQVR,刚好欠压且对 GND 短路
• 用于向 GND 供电的 LDO通信 (LDO_Com):VQCO
• 传感器电源 1(跟踪器 1):VQT1
• 传感器电源 2(跟踪器 2):VQT2
这些输出的实际值直接在输出引脚处获取,并由每个稳压器的两个比较器进行监控,一个用于过压(称为 OV),另一个用于欠压(称为 UV)。参考值VRT,XXX,high和VRT,XXX,low由仅与监控功能相关的独立带隙2提供。
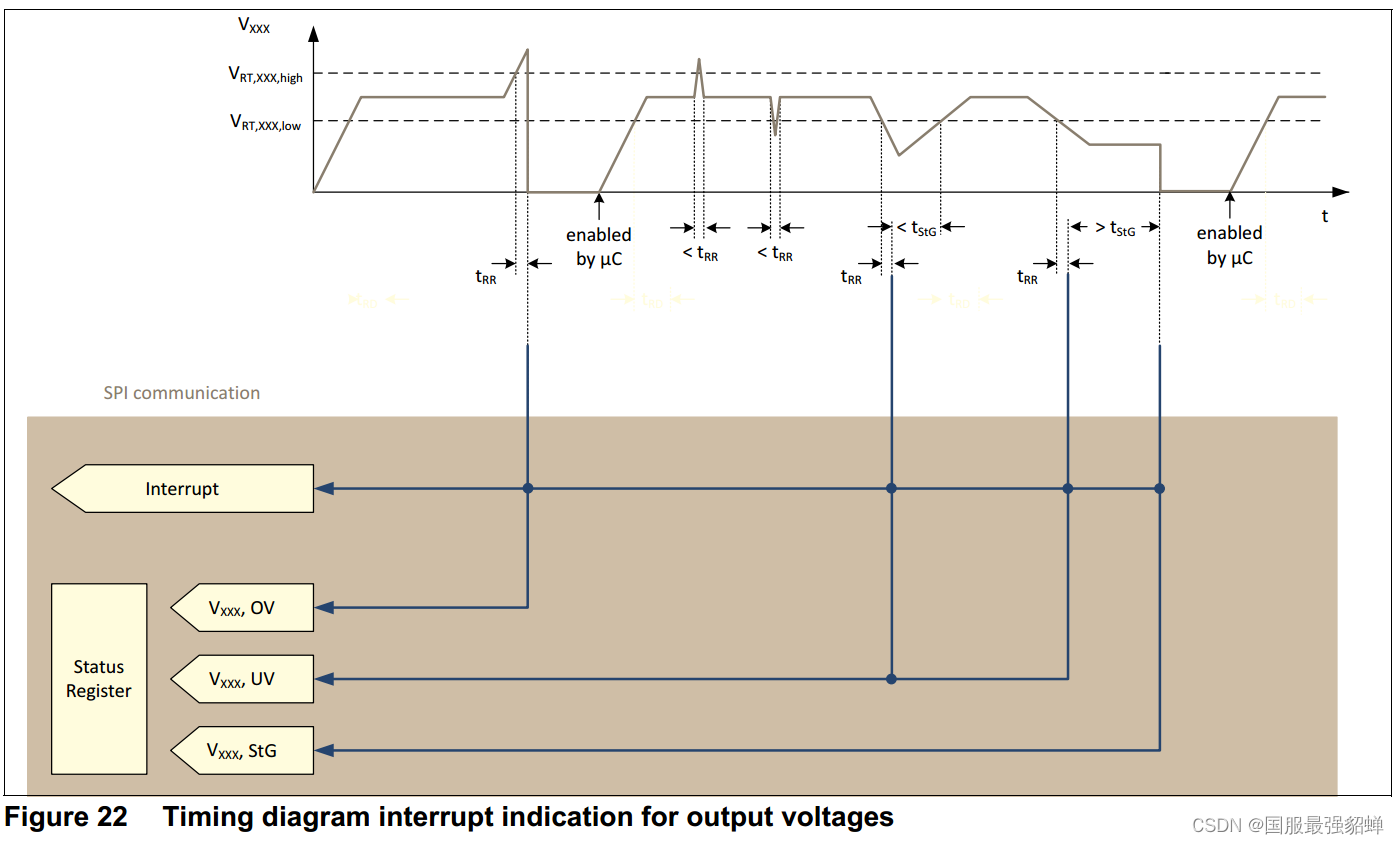
说明:
• VXXX = 由中断指示监控的输出电压:VFB、VQVR、VQCO、VQT1 或 VQT2
• VRT,XXX,high= 过压中断指示:VRT,QCO,high, VRT,QT1,high 或 VRT,QT2,high
• VRT,XXX,low= 欠压中断指示:VRT,FB,low, VRT,QVR,low, VRT,QCO,low, VRT,QT1,low 或 VRT,QT2,low
• tRR = 复位反应时间,之间的时间检测到过压并生成中断
• < tRR = 不可检测,因为短于复位反应时间
• > tStG = 对地短路检测时间,欠压后的时间被视为对地短路
• VXXX,OV = 检测到过压对于 VXXX 并存储在 SPI 寄存器 (MONSF1)
• VXXX,UV = 检测到 VXXX 欠压并存储在 SPI 寄存器 (MONSF2)
• VXXX,StG = 检测到 VXXX 接地短路并存储在 SPI 寄存器 (MONSF0)
• 适用为能够很好地检测带隙 1 至 2 变化 (MONSF3)、有助于中断功能的过载和温度事件 (OTWRNSF、OTFAIL)。请参考图42
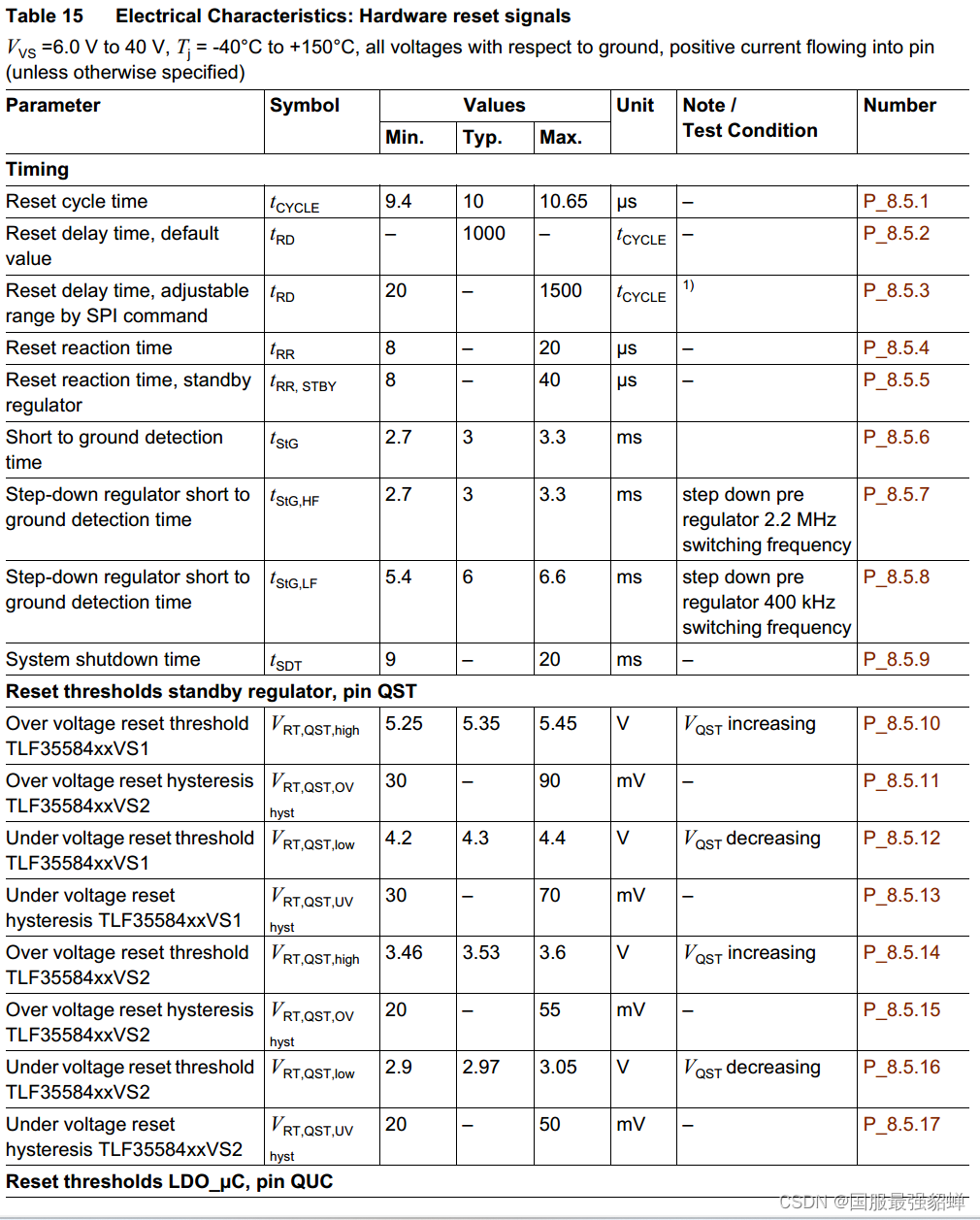
8.5 Electrical Characteristics Voltage Monitoring and Reset Function
定时
重置周期时间
复位延迟时间,可通过SPI命令调节范围
重置反应时间
复位反应时间、备用调节器
接地检测时间短
降压调节器对地短路检测时间 降压预调节器 2.2 MHz 开关频率
降压调节器对地短路检测时间 降压预调节器 400 kHz 开关频率
系统关闭时间
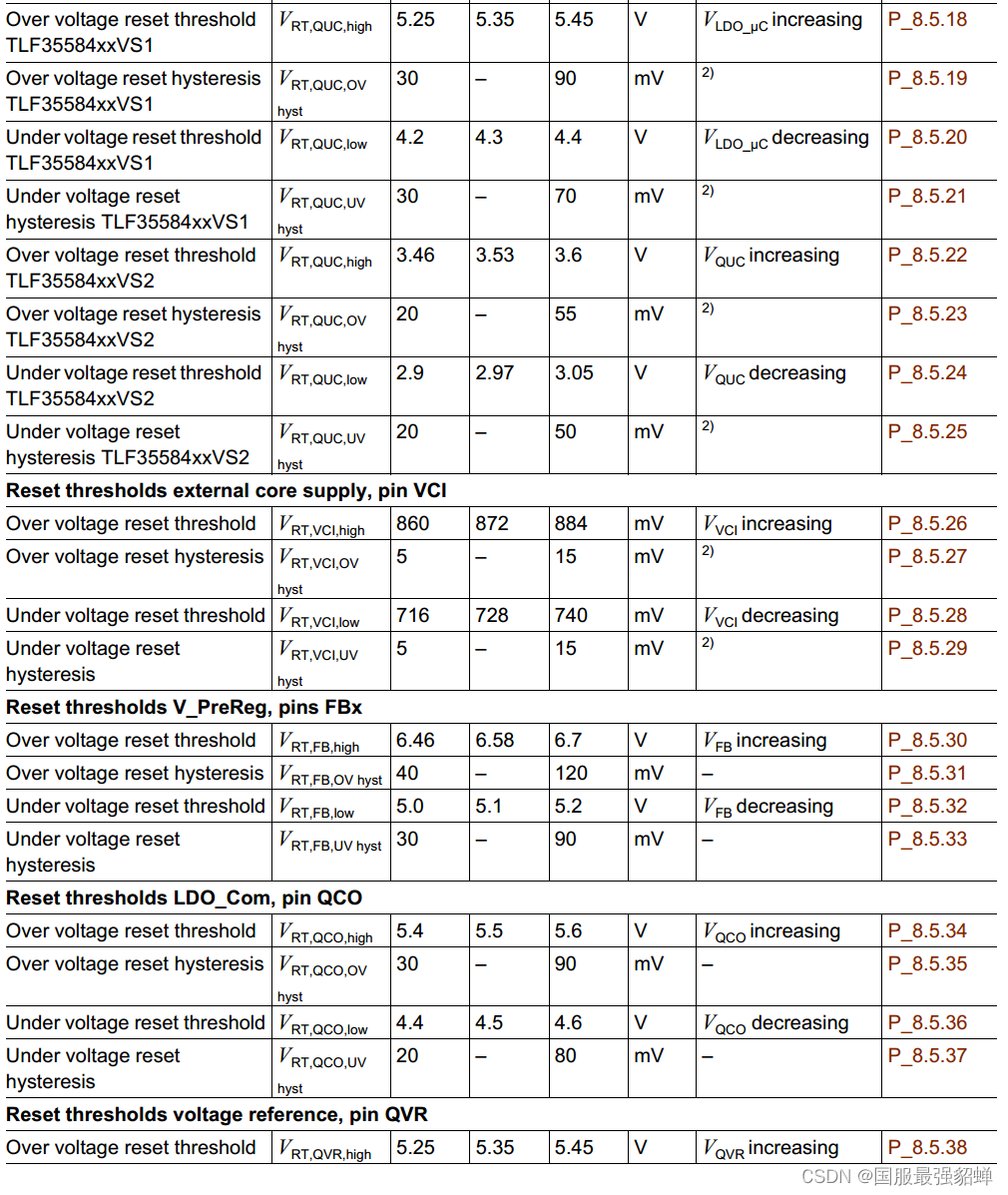
复位阈值待机稳压器,引脚 QST
复位阈值 LDO_μC,引脚 QUC
复位阈值外部内核电源,引脚 VCI
复位阈值 V_PreReg,引脚 FBx
复位阈值 LDO_Com,引脚 QCO
复位阈值参考电压,引脚 QVR
重置阈值跟踪器 1,引脚 QT1
重置阈值跟踪器 2,引脚 QT2
输入电压 VSx 监控,引脚 VSx
监控过温保护
复位输出 ROT
中断输出 INT
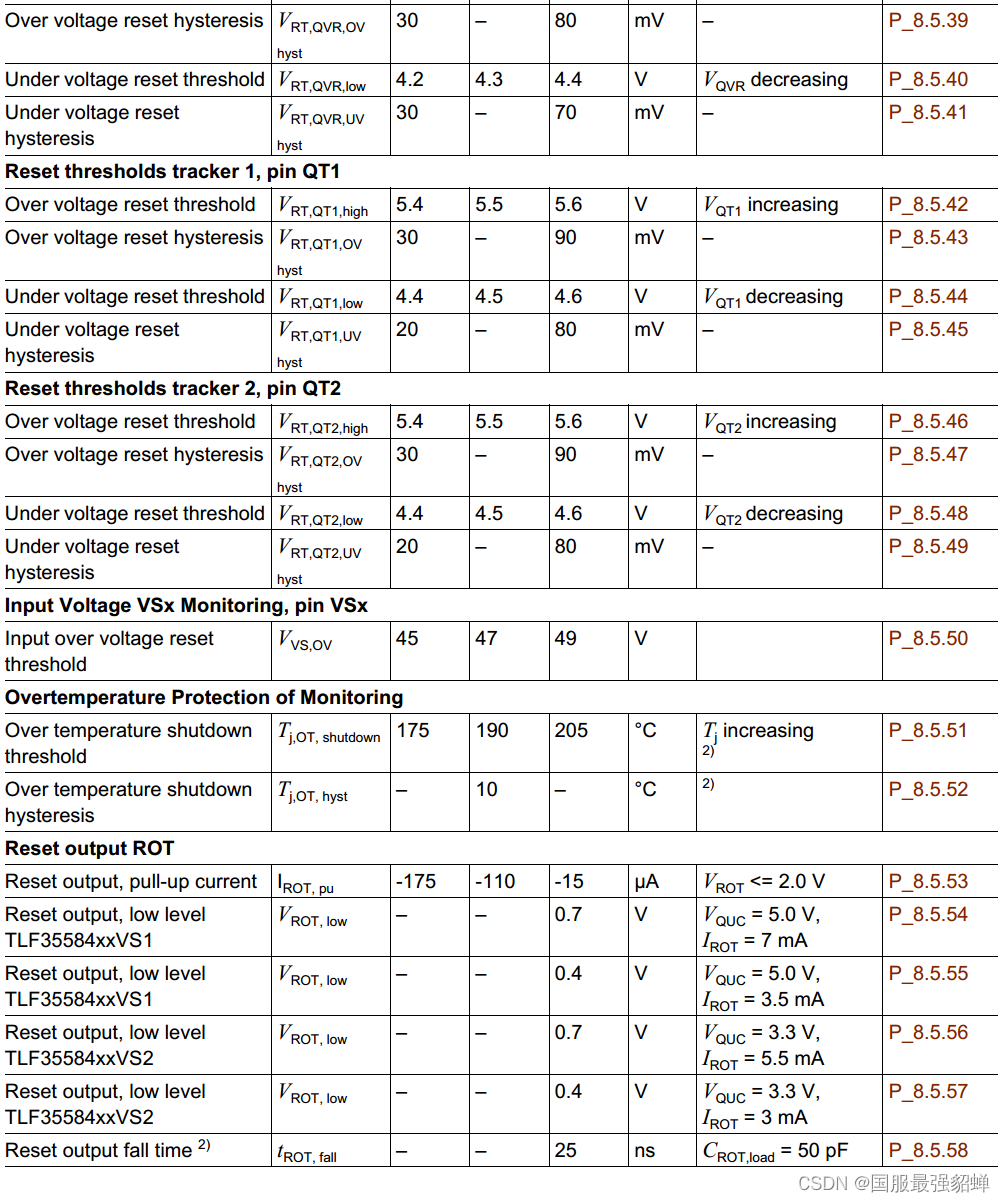
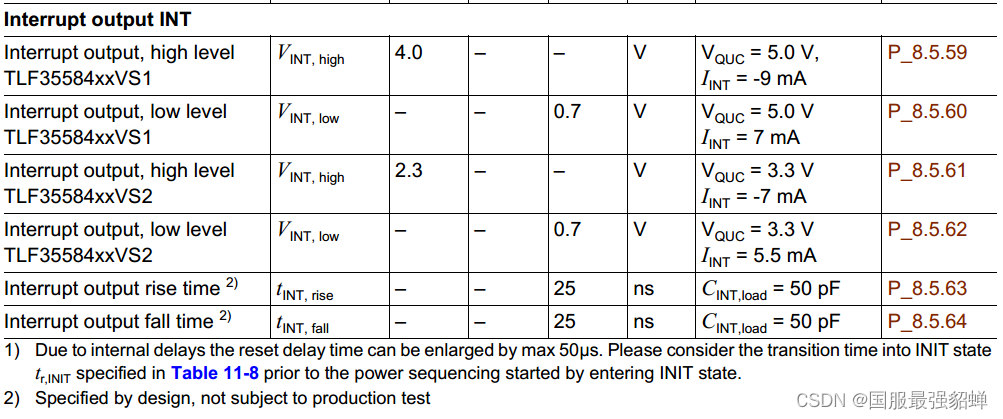
-
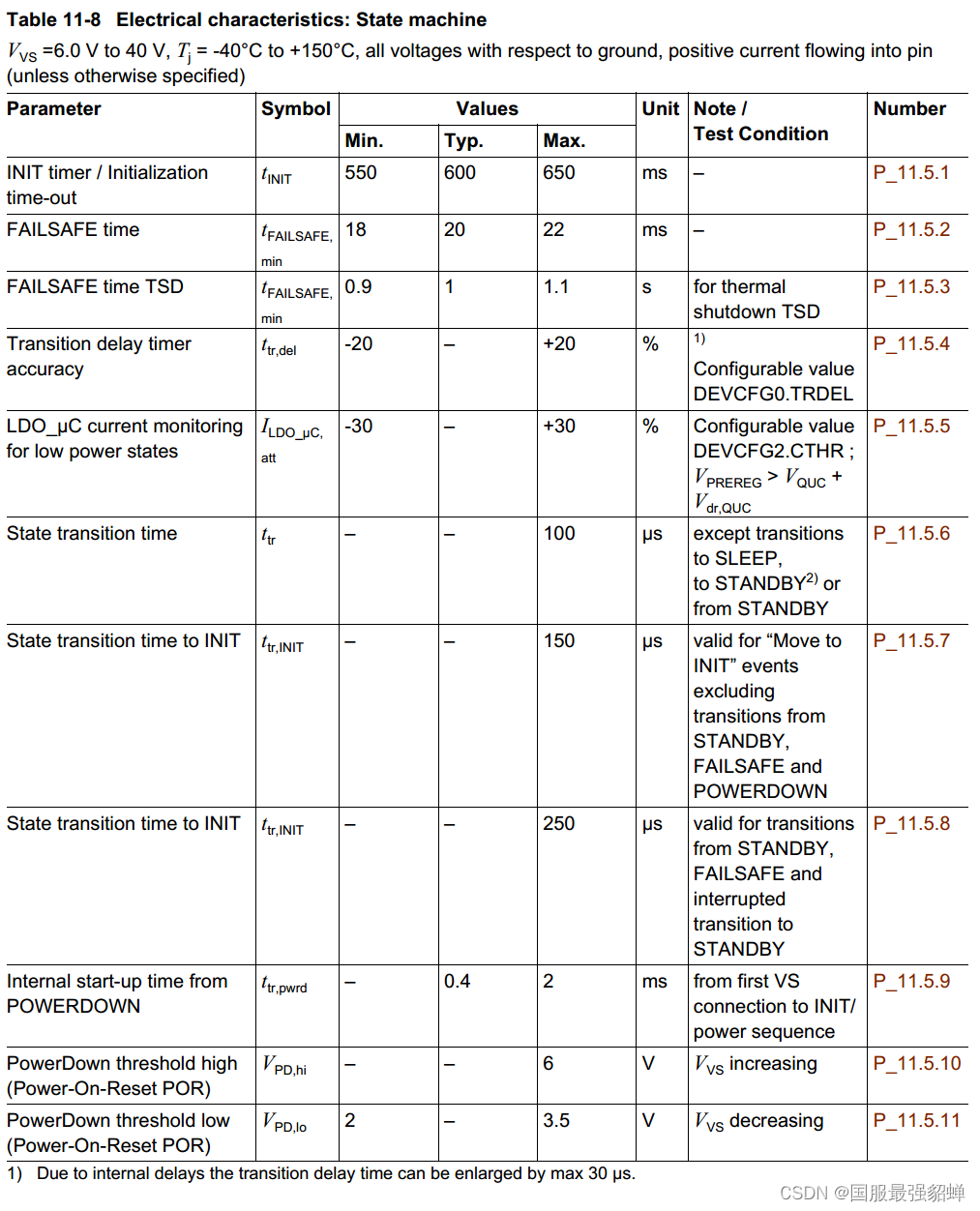
由于内部延迟,复位延迟时间最多可延长 50μs。在通过进入 INIT 状态开始上电排序之前,请考虑表 11-8 中指定的进入 INIT 状态 tr,INIT 的转换时间。
-
由设计指定,不受生产测试
9 Standby LDO and Internal Supplies 备用 LDO 和内部电源
9.1 Standby LDO:
9.1.1 Functional description
备用稳压器 LDO_STBY 独立于前置稳压器级和其他后置稳压器。它可能在所有状态下打开或关闭(详细信息请参阅状态机章节)。线性低压降稳压器 LDO_STBY 为备用电源提供精确的 3.3 V(或 5.0 V,等于 LDO_μC)输出电压。
LDO_STBY 将根据其先前的配置通过离开 STANDBY 状态来保持其状态。对于 STANDBY 状态,必须在之前的状态中定义 LDO_STBY 的状态(ON 或 OFF)。
稳压器由 VST 引脚供电。根据应用的需要,引脚 VST 可以直接连接到电池电压(受反极性二极管保护)或升压预调节器的输出(引脚 VSx)。输出电压 VQST(在引脚 QST 处)由误差放大器控制。将实际值与来自调节器带隙 1 的参考电压进行比较。控制环路的稳定性取决于负载电流、输出电容器的特性和芯片温度。为保证稳定工作,应根据“电气特性”表中规定的要求(电容值和串联电阻ESR)选择输出电容器。
安装保护电路是为了防止稳压器和应用程序受到损坏:
• 为了保护调整元件免受过载影响,电流限制会将输出电流限制在指定的最大限值。电流感测通过电流镜完成,不使用感测电阻。当出现最大电流时,它会受到限制,从而输出电压会降低。调节器具有接地短路保护。
• 输出电压由电压监控器监控。如果 QST 引脚过压,LDO_STBY 将关闭,器件将进入 FAILSAFE 状态。该事件将存储在 SPI 状态寄存器 (MONSF1) 中。如果引脚 QST 欠压,器件将进入 INIT 状态,引脚 ROT 将被拉低,事件将存储在 SPI 状态寄存器 (MONSF2) 中。如果输出欠压,稳压器不会关闭,且输出欠压小于对地短路检测时间 tStG。如果欠压持续时间超过 tStG,器件将进入故障安全状态。该事件也将存储在 SPI 状态寄存器 (MONSF0) 中。
• 该调节器没有专用的温度传感器。芯片上的温度由位于 LDO_μC 和降压预调节器的其他温度传感器感测。如果芯片温度超过预警阈值,中断将指示此事件,并将其存储在 SPI 状态寄存器(OTFAIL)中。如果芯片温度超过温度关断阈值,后置稳压器将关闭。温度关闭时间至少为一秒。 LDO STBY 过载(检测到过流超过 1ms)将由中断指示,除非器件处于 STANDBY 状态并且该事件将存储在 SPI 状态寄存器 (OTWRNSF) 中。
稳压器 LDO_STBY 可在除 FAILSAFE 之外的每种状态下配置为 ON 或 OFF。在进入该状态之前,应通过 SPI 命令选择 STANDBY 状态。
更多详细信息请参阅第 11 章状态机。
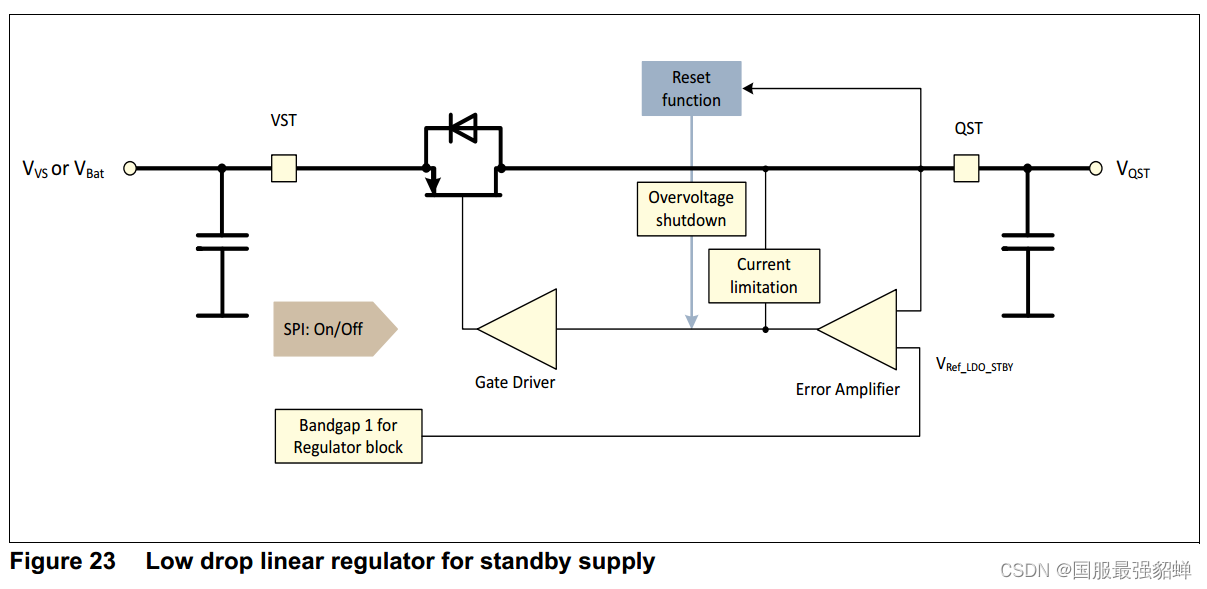
用于备用电源的低压降线性稳压器
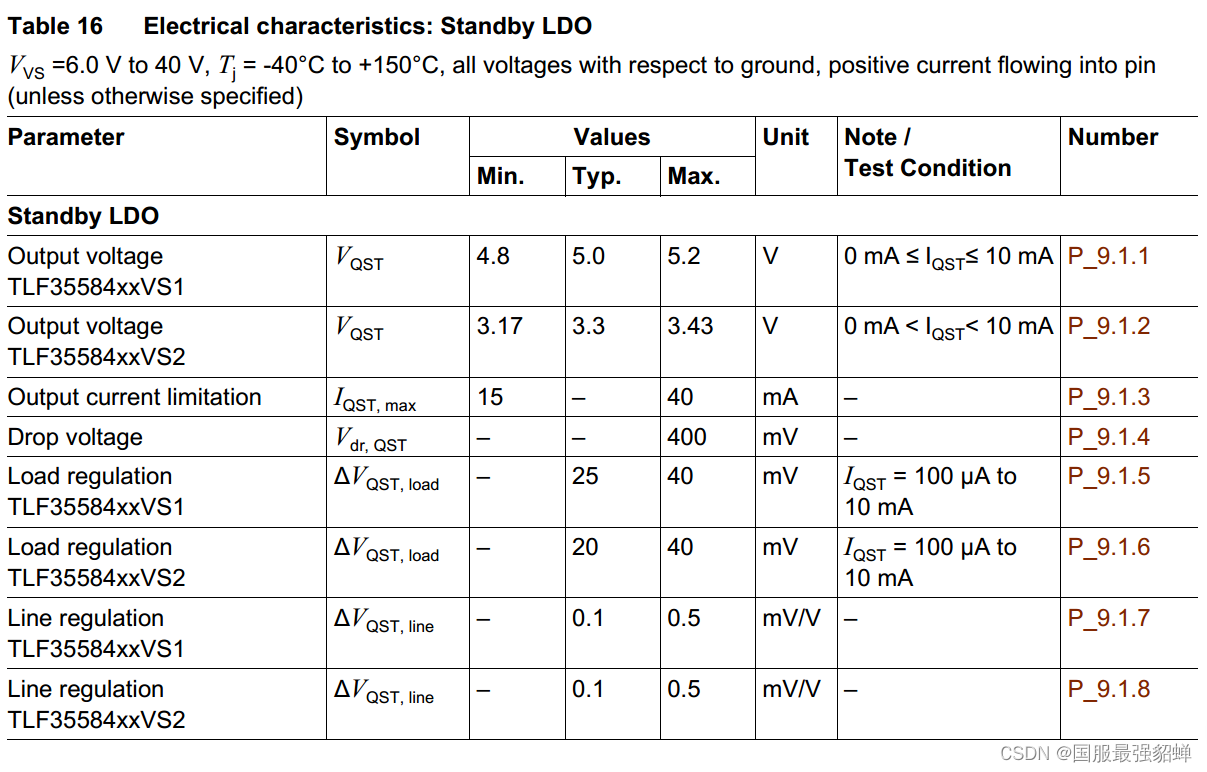
9.1.2 Electrical characteristics
输出电压
输出电流限制
电压降
负载调整率
线路调节
电源纹波抑制
输出电容
输出电容、ESR

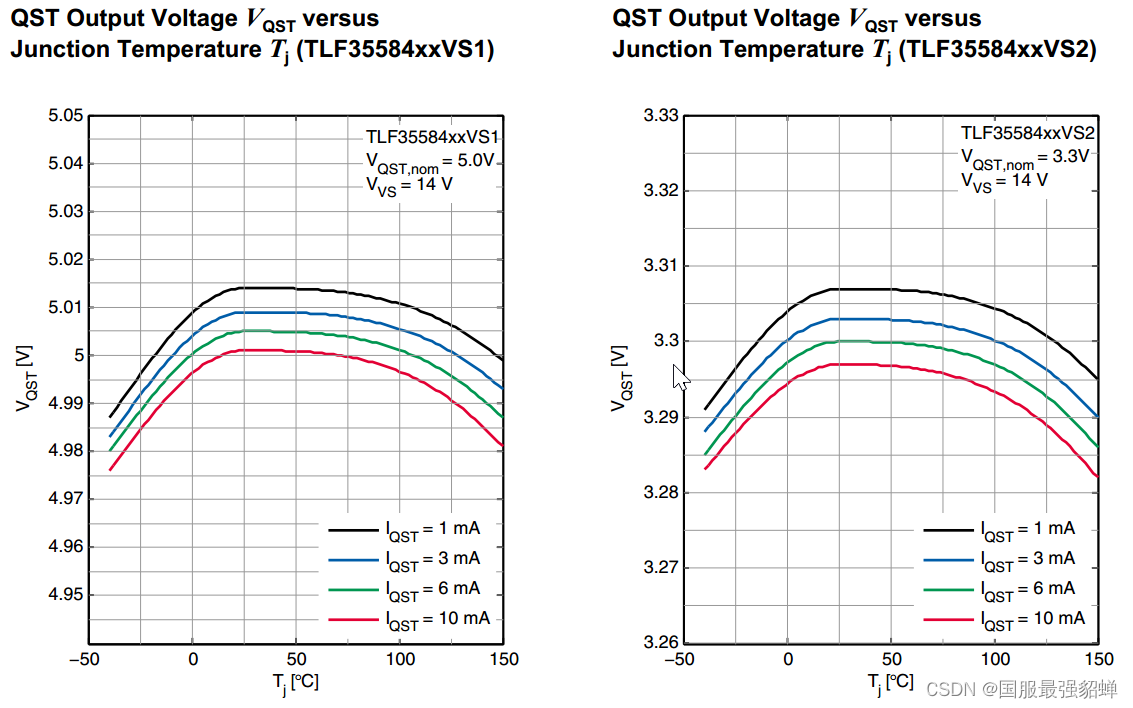
9.1.3 Typical Performance Characteristics
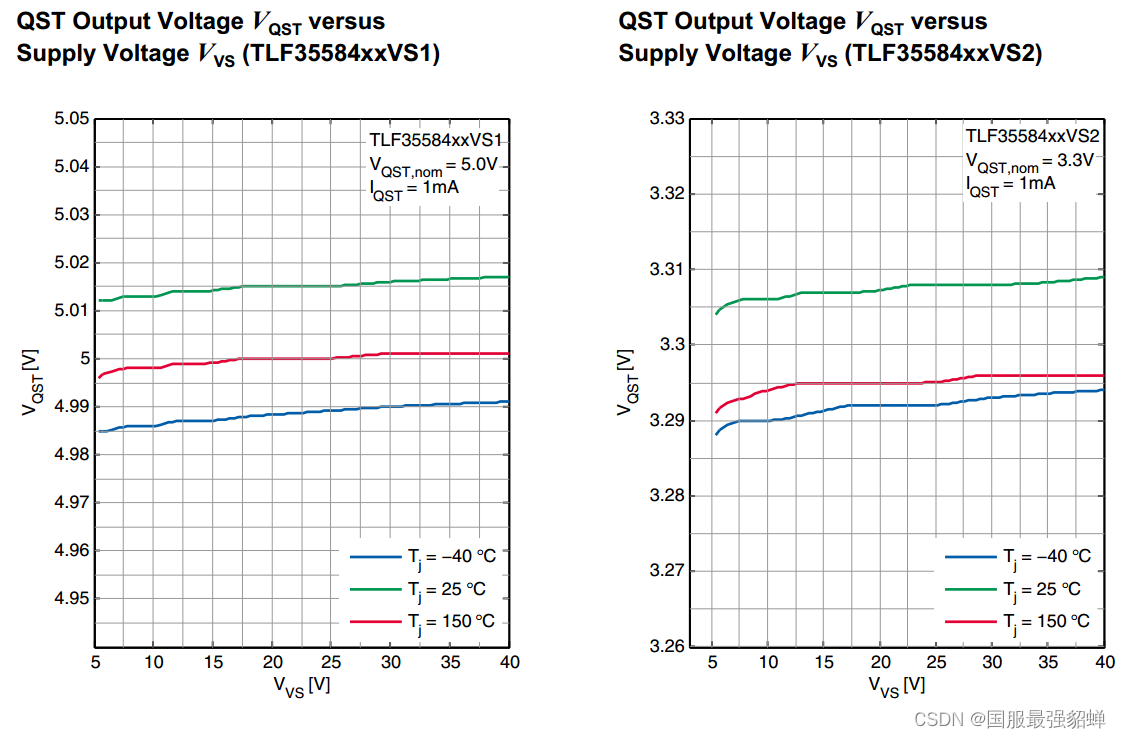
QST 输出电压 VQST 与结温 Tj (TLF35584xxVS1) , QST 输出电压 VQST 与结温 Tj (TLF35584xxVS2)
QST 输出电压 VQST 与电源电压 VVS (TLF35584xxVS1) , QST 输出电压 VQST 与电源电压 VVS (TLF35584xxVS2)
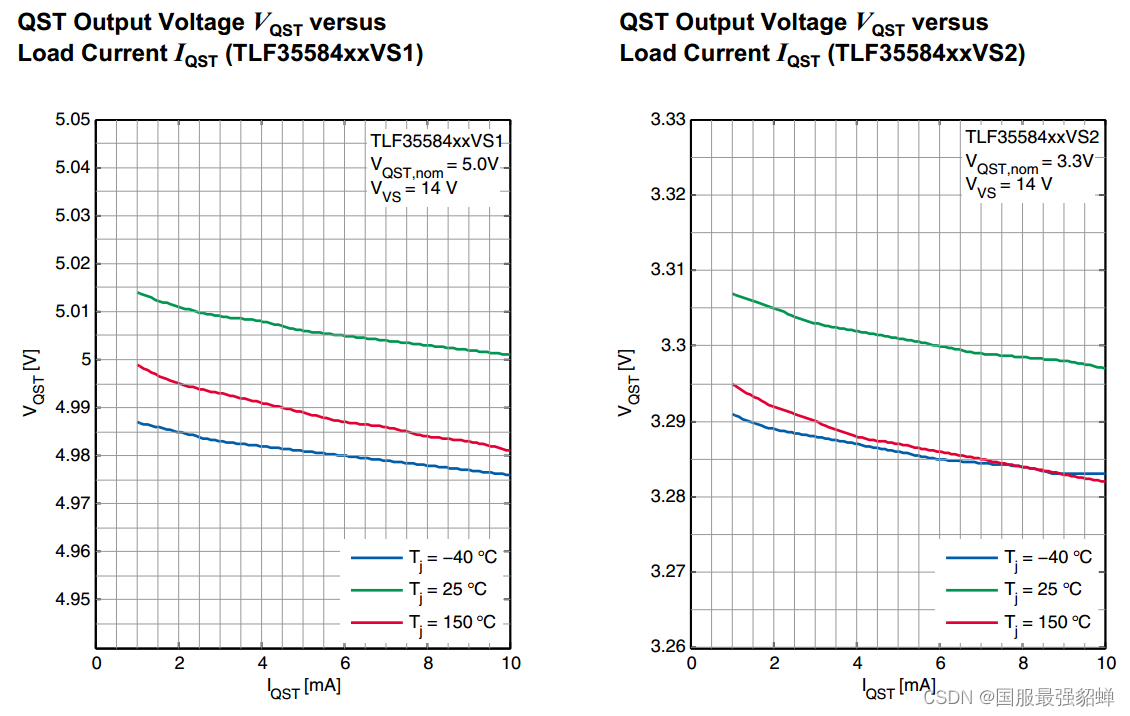
QST 输出电压 VQST 与负载电流 IQST (TLF35584xxVS1) , QST 输出电压 VQST 与负载电流 IQST (TLF35584xxVS2)
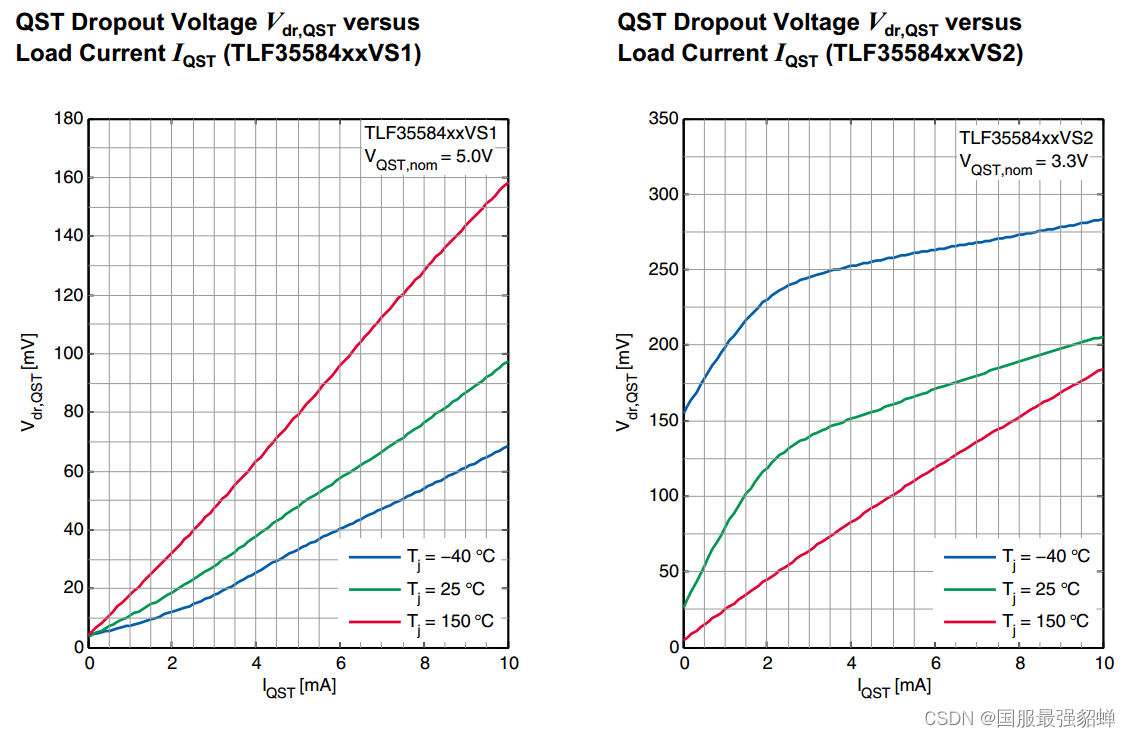
QST 压差 Vdr、QST 与负载电流 IQST (TLF35584xxVS1), QST 压差 Vdr、QST 与负载电流 IQST (TLF35584xxVS2)
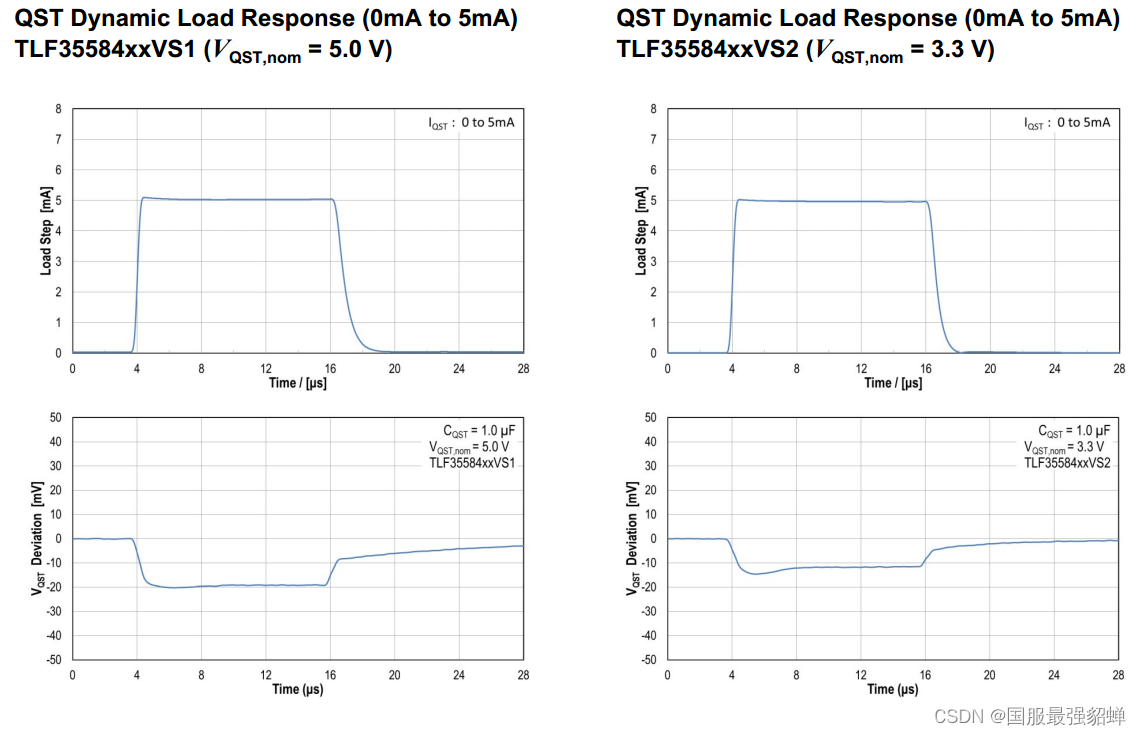
QST 动态负载响应 (0mA 至 5mA) TLF35584xxVS1 (VQST,nom = 5.0 V) , QST 动态负载响应 (0mA 至 5mA) TLF35584xxVS2 (VQST,nom = 3.3 V)
9.2 Internal Supplies 内部电源
TLF35584 包括内部电压源和偏置电流,用于操作所有稳压器、监控和逻辑功能。这些内部电源在内部进行监控,以确保 TLF35584 提供的功能块正常运行。该器件将对内部故障条件做出反应,如状态机、监控功能、中断生成和安全状态控制功能中所述。
内部稳压器不需要外部元件(即电容器)。内部电压在任何引脚上均不可见。
10 Wake Up Timer
10.1 Description
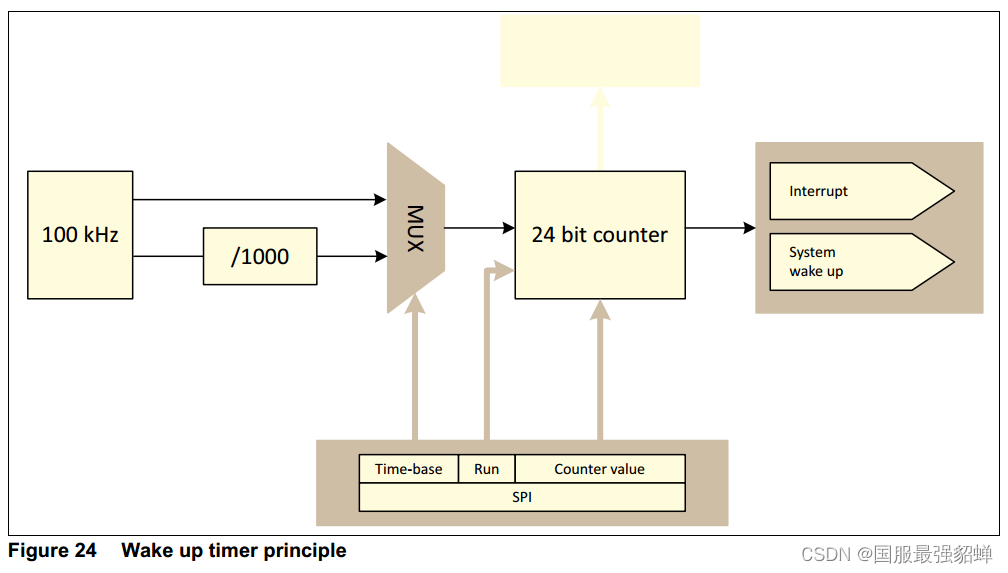
唤醒定时器是唤醒 TLF35584 的功能。
唤醒定时器值可以通过 SPI 在 INIT、NORMAL 和 WAKE 状态下设置。该值存储在 24 位宽唤醒定时器寄存器(WKTIMCFG0、WKTIMCFG1、WKTIMCFG2)中。
唤醒定时器作为 24 位计数器实现,由 100 kHz 或 100 Hz 时钟(时基)计时。
时基可以通过 SPI 选择。
对于所选的 100 kHz 时基,定时器分辨率为 10 µs,并且可通过 SPI 配置 10 µs 至 168 s 之间的唤醒时间。(唤醒定时器启动的附加激活延迟时间最大为 10 分钟。进入睡眠或待机状态后必须考虑 40 µs。)
对于所选 100 Hz 时基,定时器分辨率为 10 ms,可通过 SPI 配置 10 毫秒至 1.9 天之间的唤醒时间。
当进入待机或睡眠状态时,计数器加载唤醒定时器寄存器的值并开始递减。下溢时,定时器会将器件从睡眠或待机状态唤醒。当离开 SLEEP 状态时,将产生中断。
10.2 Electrical Characteristics
时基、分辨率
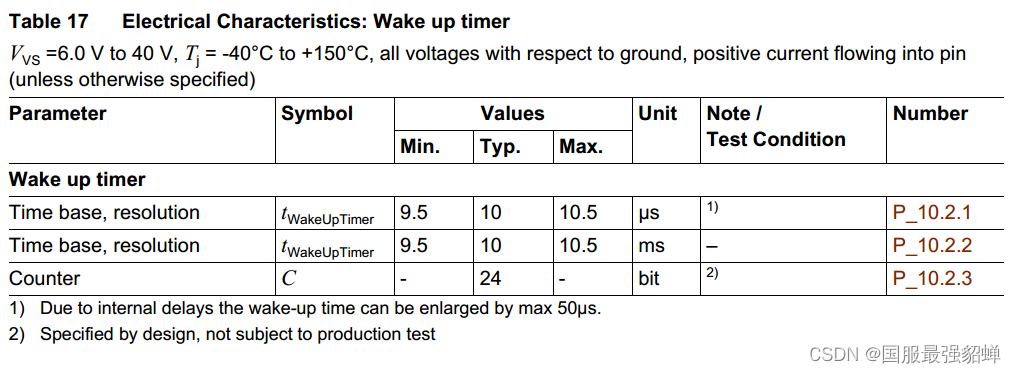
由于内部延迟,唤醒时间最多可延长 50μs。
11 State Machine
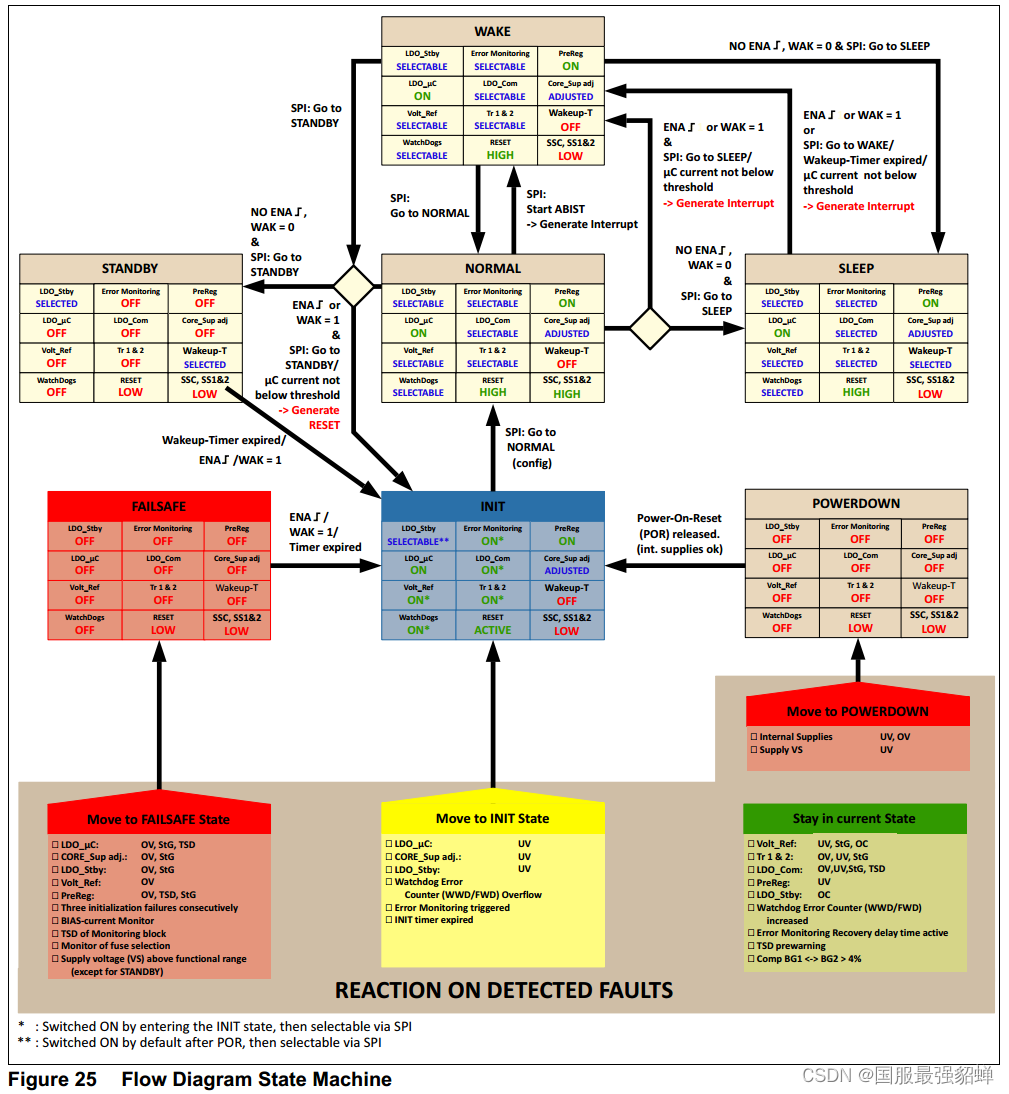
11.1 Introduction
状态机描述了设备可能进入的不同操作状态。下图为状态机流程图,详细信息请参考后续页面。
说明:
• ON /OFF:= 打开或关闭,不可通过 SPI 命令配置
• ON*:= 通过进入 INIT 状态打开,然后可通过 SPI 选择
• SELECTED:= 可通过 SPI 配置(打开或关闭)命令处于先前状态,或者在 LDO 配置为休眠状态的情况下由状态转换请求 (DEVCTRL) 选择。
• SELECTABLE: = 在此状态下可通过 SPI 命令打开或关闭
• SELECTABLE**: = POR 后默认打开,然后可通过 SPI 选择
• ADJUSTED: = 由配置引脚定义存在或不存在,不可通过 SPI 配置命令
• ACTIVE:= 如初始化状态中所述
• SSC、SS1&2:= 安全状态控制信号 1 和 2
• LOW:= 信号为低电平
• HIGH:= 信号为高电平
• OV:= 过压
• UV:= 欠压
• StG: = 对地短路
• TSD: = 热关断
• OC: = 过流
• ABIST: = 模拟内置自检
• Comp BG1 <-> BG2 > 4% :带隙 1 和 2 之间的差异为超过4%
11.2 Description of States 状态描述
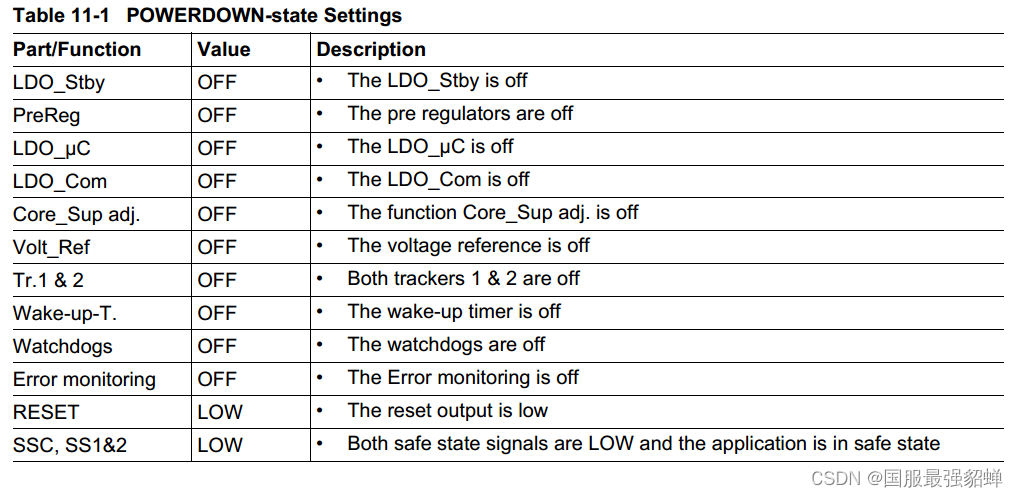
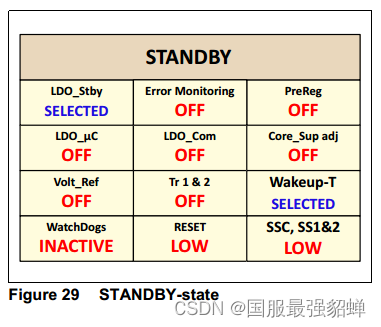
11.2.1 POWERDOWN-state 掉电状态
只要上电复位 (POR) 未释放,器件就处于断电状态。
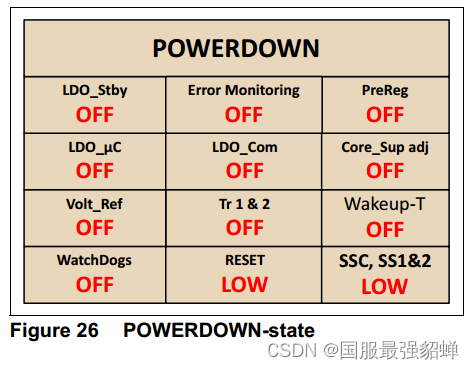
断电状态设置
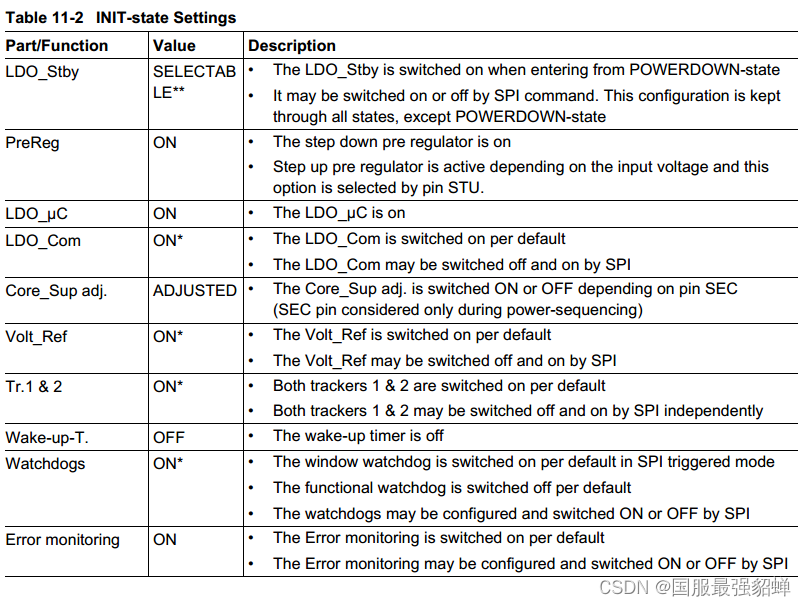
11.2.2 INIT-state 初始化状态
在 INIT 状态期间,器件期望在 INIT 定时器内与 µC 进行有效通信。否则会发生初始化超时。 INIT 定时器从 ROT 的上升沿开始。
一旦满足三个边界条件,INIT 定时器就会停止:
• 从 µC 接收到有效的 SPI 通信
• 看门狗根据默认配置或根据重新配置服务一次
• ERR 监控正确服务(提供至少 3 个周期)或配置为OFF
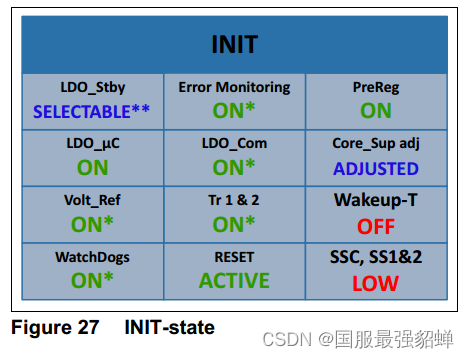
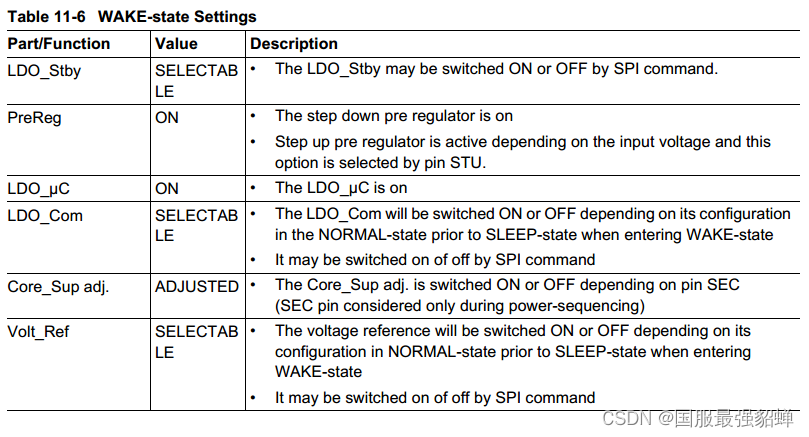
LDO_Stby LDO_备用
• 从 POWERDOWN 状态进入时,LDO_Stby 开启
• 可通过SPI 命令打开或关闭。此配置在除 POWERDOWN 状态之外的所有状态下均保留
PreReg 预调节器
• 降压预调节器打开
• 升压预调节器根据输入电压激活,该选项由引脚STU 选择。
LDO_μC
• LDO_μC 开启
LDO_Com
• LDO_Com 默认打开
• LDO_Com 可以通过 SPI 关闭和打开
Core_Sup 调整
• Core_Sup 调整。根据 SEC 引脚打开或关闭(仅在上电排序期间考虑 SEC 引脚)
Volt_Ref 电压参考值
• Volt_Ref 默认打开
• Volt_Ref 可以通过 SPI 关闭和打开
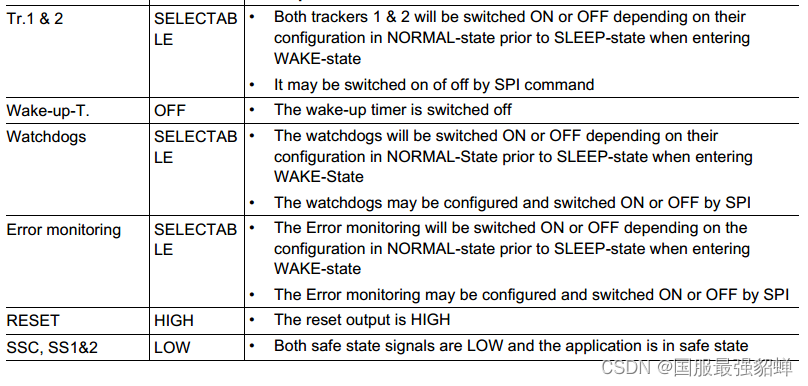
Tr.1 & 2
• 默认情况下,跟踪器 1 和 2 均处于开启状态
• 跟踪器 1 和 2 均可通过 SPI 独立关闭和打开
Wake-up-T
• 唤醒定时器关闭
Watchdogs 看门狗
• SPI 触发模式下默认打开窗口看门狗
• 功能看门狗默认关闭
• 看门狗可以通过SPI 配置和打开或关闭
Error monitoring 错误监控
• 错误监控默认打开
• 错误监控可通过 SPI 配置并打开或关闭
RESET 复位
• 一旦所有 µC 相关输出电压 VQST、VQUC 和 VVCI 高于其欠压复位阈值 VRT、XXX、low(延迟了复位延迟时间 tRD),复位输出就会变为高电平。
SSC、SS1&2
• 两个安全状态信号均为低电平且应用处于安全状态

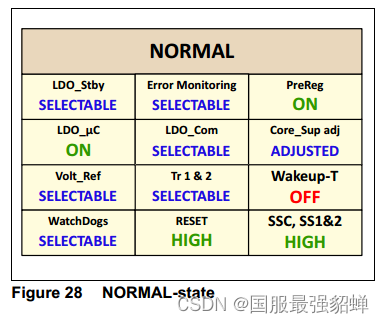
11.2.3 NORMAL -state 正常状态
在正常状态下,器件为 µC 和应用程序供电。安全和监控功能(如重置块和安全状态控制)处于活动状态。 µC 可以为此状态通过 SPI 命令配置器件的多个后置稳压器和唤醒定时器。
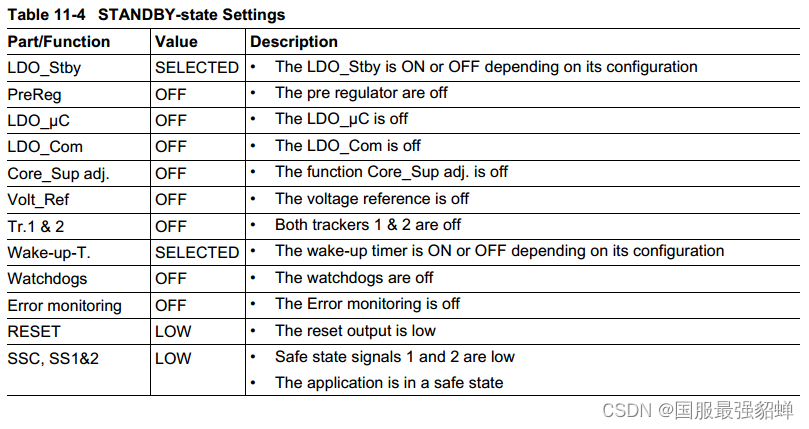
11.2.4 STANDBY-state 待机状态
待机状态是一种低功耗状态,当应用程序长时间不使用时,μC 可以进入该状态以将电流消耗降至最低。该应用程序处于安全状态。
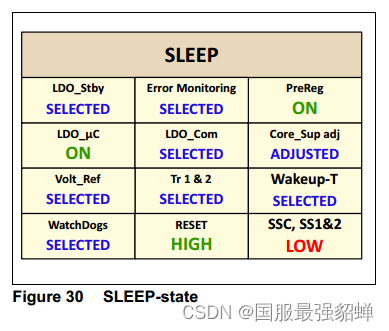
11.2.5 SLEEP-state 睡眠状态
睡眠状态是一种低功耗状态,当不使用应用程序时(例如,微控制器处于停止模式),μC 可以进入该状态以减少电流消耗。 µC 可以在之前的状态下通过 SPI 命令配置稳压器的状态和安全功能。应用程序处于安全状态。
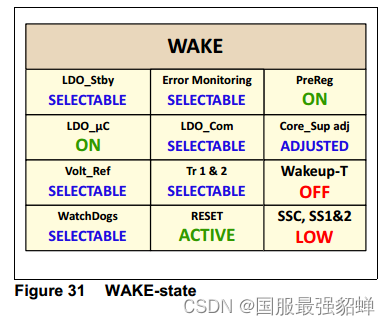
11.2.6 WAKE-state 唤醒状态
唤醒状态是正常状态与低功耗状态睡眠和待机之间的中间状态。
此状态提供与正常状态相同的功能,但应通过保持低安全状态输出来确保应用程序处于安全状态。它应该用于通过根据所选配置服务看门狗和错误监控(至少 3 个周期),为系统准备正确且安全地重新进入正常状态。此外,它还提供了将设备转入低功耗状态SLEEP 和 STANDBY的可能性。
TLF35584 从 SLEEP 状态或从 SLEEP 状态转变为 WAKE 状态,如果 LDO_µC 的输出电流超过特定阈值 ILDO_µC,att,则会识别有效的 ENA 或 WAK 信号或发送 SPI 命令 GoToWake。进入唤醒状态的另一个转换是通过在NORMAL状态下使用 ABIST 来启动的。
进入该状态后,会生成中断,并且监控功能(看门狗和 ERR 监控)将根据其之前在NORMAL状态下的配置而变为活动状态。进入WAKE状态后,LDOs 的配置将恢复到之前的正常状态之一。应用程序处于安全状态
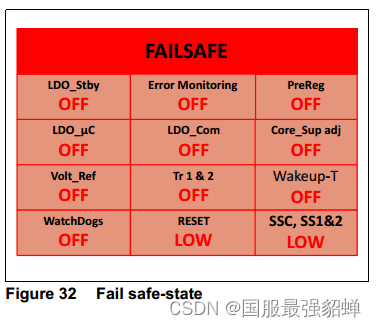
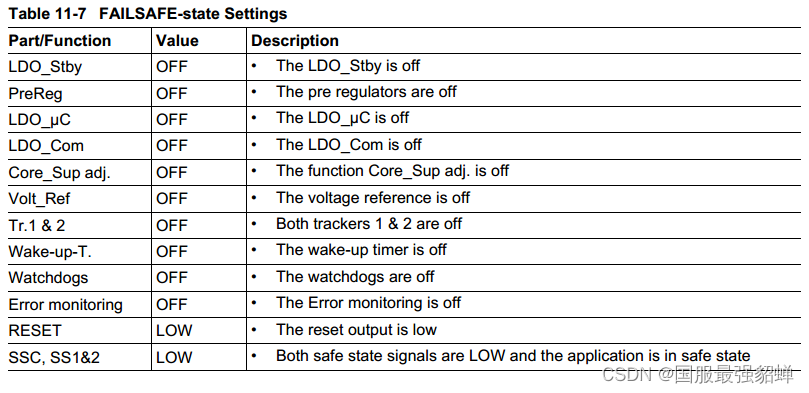
11.2.7 FAILSAFE-state 故障安全状态
FAILSAFE 状态在检测到严重故障后发生。在故障安全状态下,所有调节器均关闭。
应用程序处于安全状态。
11.3 状态之间的转换
通过 SPI 命令请求的状态转换由片选 (SCS) 的有效正向边沿启动。
11.3.1 POWERDOWN -> INIT-state 断电 -> 初始化状态
当上电复位 (POR) 释放时,器件从断电状态转至初始化状态。仅当满足以下所有条件时才会释放 POR:
• VVS 高于 VPD,hi(增加时)
• 内部电源无欠压或过压
11.3.2 INIT -> NORMAL 状态
Prerequisites: 先决条件:
• 需要根据默认配置或 INIT 定时器内的重新配置对看门狗进行一次维护
• ERR 监视器需要通过有效信号(至少 3 个周期)进行维护或在 INIT 定时器内禁用。
• 如果功能看门狗被激活,则需要提供有效的FWD 触发。
• 必须考虑提供服务后60μs 的延迟,以确保内部验证信号的正确发布。
Triggering Events: 触发事件:
• 状态转换仅由SPI 命令“Go to NORMAL”启动。
Exceptions:例外:
• 无
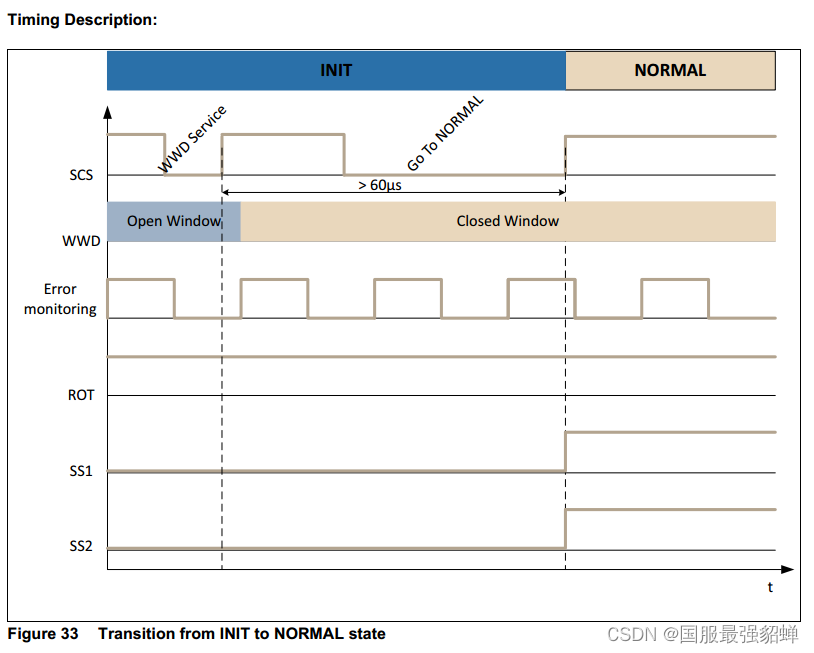
• 有效的SPI 命令“Go to NORMAL”(在引脚SCS 处的芯片选择为高电平时有效)会将器件从INIT 状态移至NORMAL 状态。
• 复位引脚ROT 保持高电平,因为后置稳压器已在INIT 状态下激活。
• 随着片选高电平的上升沿(在引脚SCS 处),安全状态信号SS1 和SS2 同时被拉至高电平。 (必须考虑表 18 中安全状态输出的内部反应时间)
11.3.3 NORMAL 和SLEEP 状态之间的转换
11.3.3.1 NORMAL -> SLEEP
Prerequisites: 先决条件:
• 选择LDO_µC 电流监视器或绝对转换定时器。
• 转换延迟定时器ttr,del 需要配置或使用默认值。
• (可选)需要定义LDO_μC 电流阈值或使用默认值。
Triggering Events: 触发事件:
• 状态转换仅由SPI 命令“Go to SLEEP”启动。
Exceptions: 例外情况:
• 如果在向睡眠状态的转换状态中检测到有效的 ENA(边沿)或 WAK(电平)信号,则器件将转至 WAKE 状态并发送中断(在引脚 INT 处)
• 如果 LDO_µC 电流监视器为在转换延迟定时器 ttr,del 到期之前,微控制器的电流消耗不低于选定的 LDO_μC 电流阈值,器件将进入 WAKE 状态并发送中断(在引脚 INT)
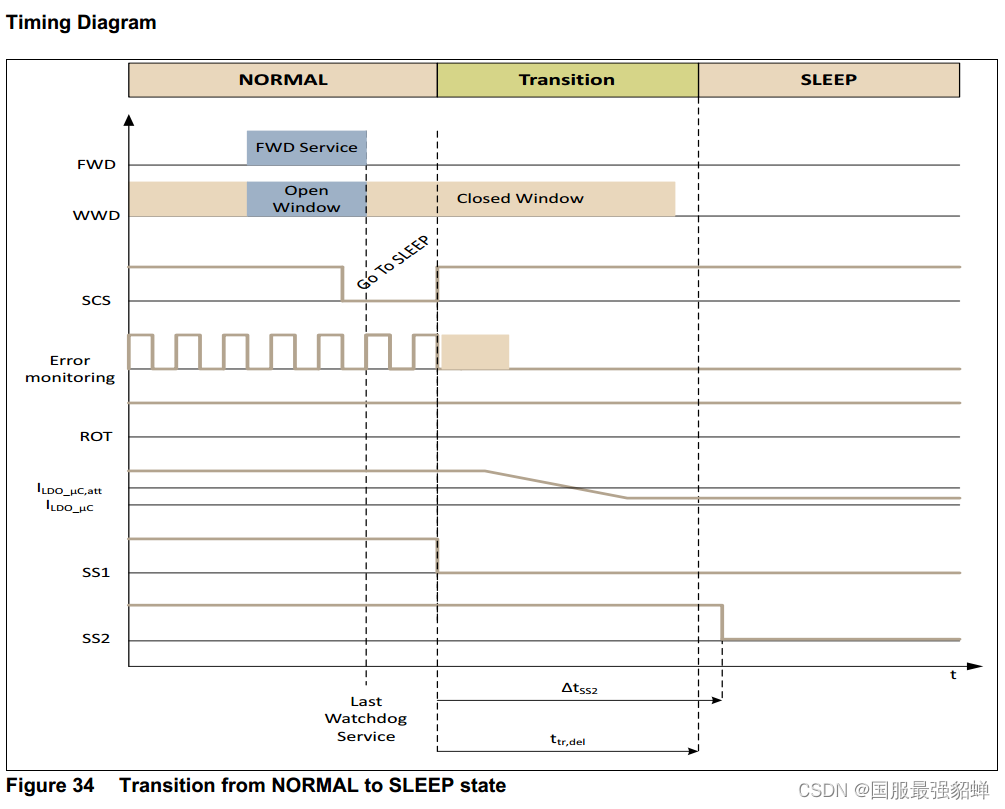
• 在应用SPI 命令“Go to SLEEP”之前,应维修看门狗(如果正在使用),以便SCS 信号的上升沿正好处于窗口看门狗的“关闭窗口”之间。建议这样做,以避免丢失看门狗触发和转换命令“进入休眠”之间的干扰。
• SPI 命令“Go to SLEEP”启动转换后,片选(引脚 SCS)的上升沿。当片选为高电平时,安全状态信号 SS1 被拉至零,器件离开正常状态并进入转换状态(进入休眠状态)。 (必须考虑根据表18 的安全状态输出的内部反应时间)
• 当芯片选择(引脚SCS)为高电平时,错误监控(引脚ERR)停止- 切换可能以引脚SCS 的正边沿结束。如果应选择在睡眠状态下激活错误监控,则必须进行连续切换。
• 窗口看门狗和功能看门狗的监视随着引脚SCS 的上升沿停止。如果应选择一个或两个看门狗在睡眠状态下处于活动状态,则必须强制执行连续看门狗服务。
• 复位引脚ROT 保持高电平,因为后置稳压器未关闭。
• 如果选择绝对转换定时器,则器件会在转换延迟时间ttr,del 之后从转换状态移至休眠状态。过渡时间 ttr,del 可通过 SPI 命令确定,范围为 100 µs 至 1.6 ms,默认设置为 900 µs。在此转换时间之后,应确保 µC 电流消耗已降至 LDO_µC 监控阈值 ILDO_µC,att 以下,以保持器件处于休眠状态。
• 如果LDO_μC 电流监视器使能,则引脚QUC 输出的μC 电流必须在DEVCFG0.TRDEL 中配置的最大转换时间ttr,del 内降至LDO_μC 监视阈值ILDO_μC,att 以下。转换时间取决于 µC 电流降至 LDO_µC 监控阈值 ILDO_µC,att 以下所需的时间(如果低于转换完成)。
• 延迟时间ΔtSS2 之后,安全状态信号SS2 变为零。调整后的延迟时间ΔtSS2 与转换延迟时间ttr,del 无关。
11.3.3.2 SLEEP -> WAKE
先决条件:
• 无
触发事件:
• SPI 命令“转到唤醒”。
• 有效唤醒信号(ENA 或WAK)。
• LDO_µC 的电流超过配置的阈值。
• 唤醒定时器到期(如果已启用)
例外:
• 无
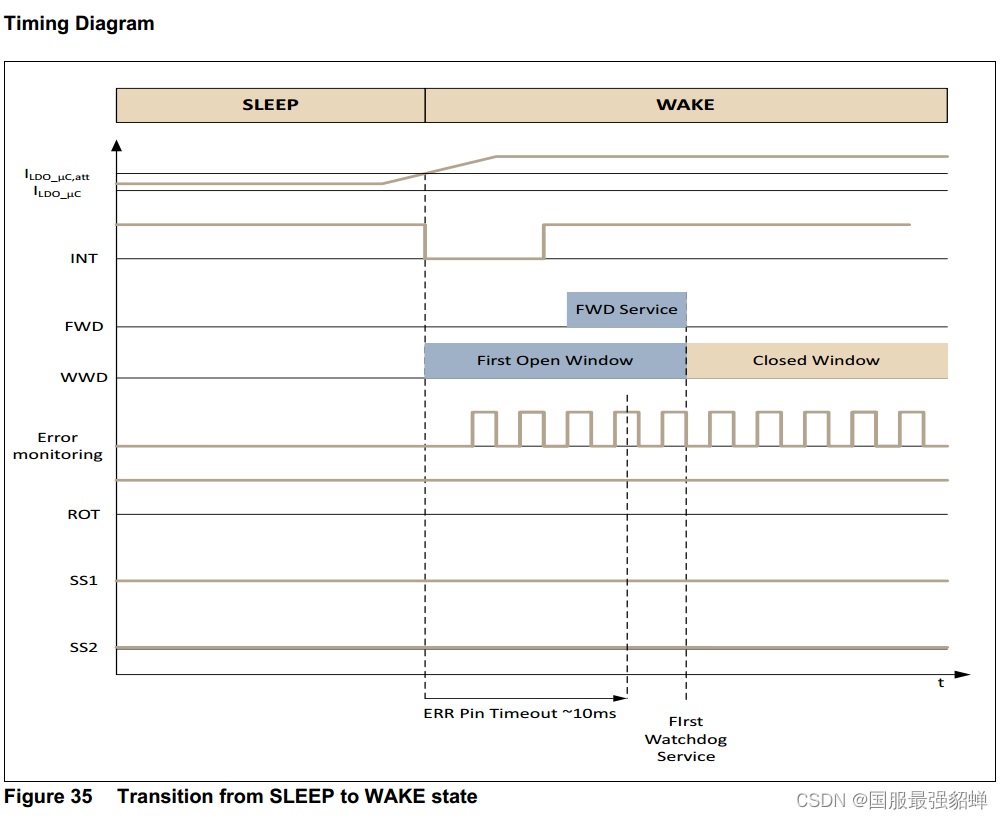
• 状态转换无需转换时间即可完成,并由引脚INT 处的中断指示。从 SLEEP 状态转换的触发事件可以从状态寄存器 WKSF 中读取。
• 所有三个监视功能(窗口看门狗、功能看门狗和错误监视)都将恢复到活动或非活动(关闭)状态,就像它们在睡眠状态之前处于正常状态一样。
• LDO 的配置将恢复到活动或非活动(关闭)状态,就像它们在休眠状态之前处于正常状态一样。
• 如果窗口看门狗在之前的正常状态下处于活动状态,则随着中断信号(在引脚 INT)的下降沿,窗口看门狗将打开第一个打开窗口,该第一个打开窗口的时间取决于配置的周期时间和为 600 ms (WDCYC = 1) 或 60 ms (WDCYC = 0)(如果窗口看门狗在 SLEEP 状态下未激活)并且需要维修。如果窗口看门狗在睡眠状态下处于活动状态,则必须强制执行连续服务。
• 如果功能看门狗在之前的正常状态下处于活动状态,则随着中断信号(引脚INT 处)的下降沿,功能看门狗将启动心跳定时器并需要服务。如果功能看门狗在睡眠状态下处于活动状态,则必须强制执行连续服务。
• 如果ERR 引脚监控在先前的NORMAL 状态下处于活动状态,则随着中断信号(在引脚INT 处)的下降沿,错误监控将再次变为活动状态。激活后的最后 10 毫秒,需要在引脚 ERR 处发出切换信号(至少过去三个周期)。如果错误监控在睡眠状态下处于活动状态,则必须进行连续切换。
• 当后置稳压器在睡眠状态和唤醒状态下处于活动状态时,复位引脚 ROT 保持高电平。
• 安全信号SS1 和SS2 在SLEEP 和WAKE 状态下将保持低电平。
• 如果所有活动监控功能(窗口看门狗、功能性看门狗和错误监控)在 WAKE 状态下均得到正确服务,则您可以在 WAKE 状态停留任意长时间。
• 如果所有三个监视功能(窗口看门狗、功能看门狗和错误监视)在 WAKE 状态下均处于非活动状态(关闭),则您可以在 WAKE 状态停留任意长时间。
11.3.3.3 WAKE -> SLEEP
先决条件:
• 选择LDO_μC 电流监视器或绝对转换定时器。
• 转换延迟定时器ttr,del 需要配置或使用默认值。
• (可选)需要定义LDO_μC 电流阈值或使用默认值。
触发事件:
• 状态转换仅由SPI 命令“Go to SLEEP”启动。
例外:
• 如果在到睡眠状态的转换过程中检测到有效的 ENA(边沿)或 WAK(电平)信号,则器件将移回唤醒状态并发送中断(在引脚 INT 处)
• 如果 LDO_µC 电流监视器被激活并且在转换延迟定时器 ttr,del 到期之前微控制器的电流消耗不低于所选的 LDO_μC 电流阈值,器件将移回 WAKE 状态并发送中断(在引脚 INT)
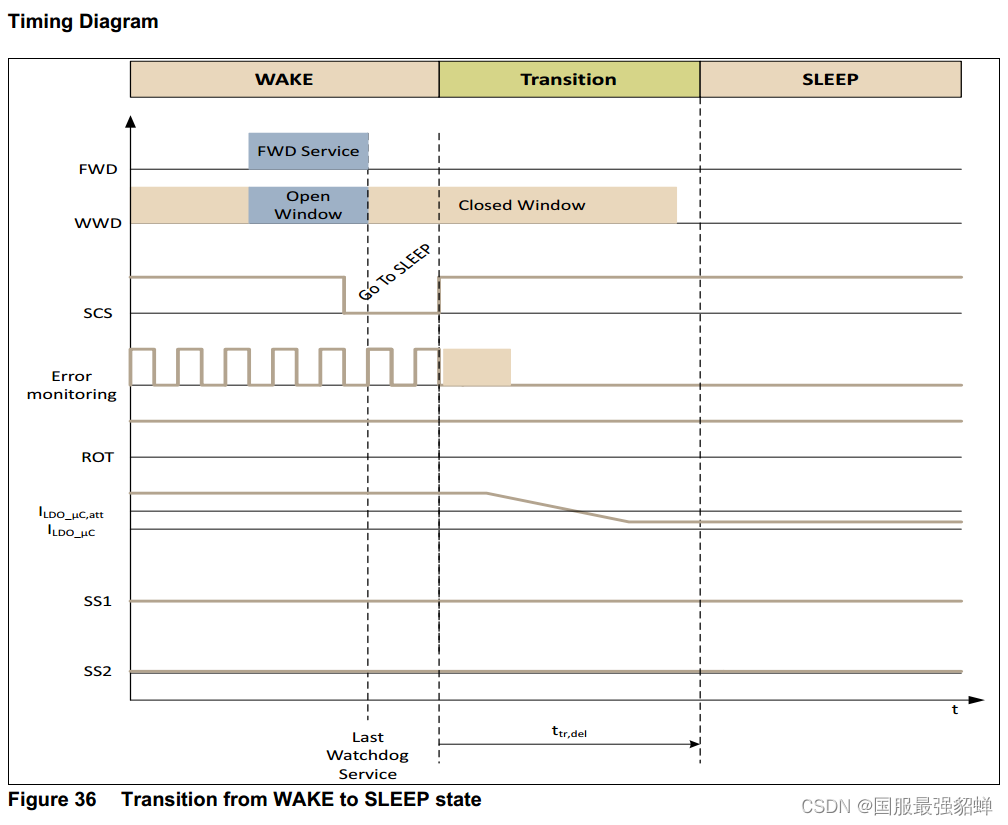
• 在应用SPI 命令“Go to SLEEP”之前,应维修看门狗(如果正在使用),以便SCS 信号的上升沿正好处于窗口看门狗的“关闭窗口”之间。建议这样做,以避免丢失看门狗触发和转换命令“进入休眠”之间的干扰。
• SPI 命令“Go to SLEEP”启动转换后,片选(引脚 SCS)的上升沿。当片选为高电平时,器件离开 WAKE 状态并进入转换状态(进入 SLEEP 状态)。
• 当片选(引脚SCS)为高电平时,错误监控(引脚ERR)停止——切换可能会随着引脚SCS 的上升沿而结束。如果应选择在睡眠状态下激活错误监控,则必须进行连续切换。
• 窗口看门狗和功能看门狗的监视随着引脚SCS 的上升沿停止。如果应选择一个或两个看门狗在睡眠状态下处于活动状态,则必须强制执行连续看门狗服务。
• 复位引脚ROT 保持高电平,因为后置稳压器未关闭。
• 如果LDO_μC 电流监视器使能,则引脚QUC 输出的μC 电流必须在配置的最大转换延迟时间ttr,del 内降至LDO_μC 监视阈值ILDO_μC,att 以下。转换时间取决于 µC 电流降至 LDO_µC 监控阈值 ILDO_µC,att 以下所需的时间(如果低于转换完成)。
• 安全状态信号SS1 和SS2 始终保持低电平。
11.3.4 Movements between NORMAL and STANDBY state 正常和待机状态之间的转换
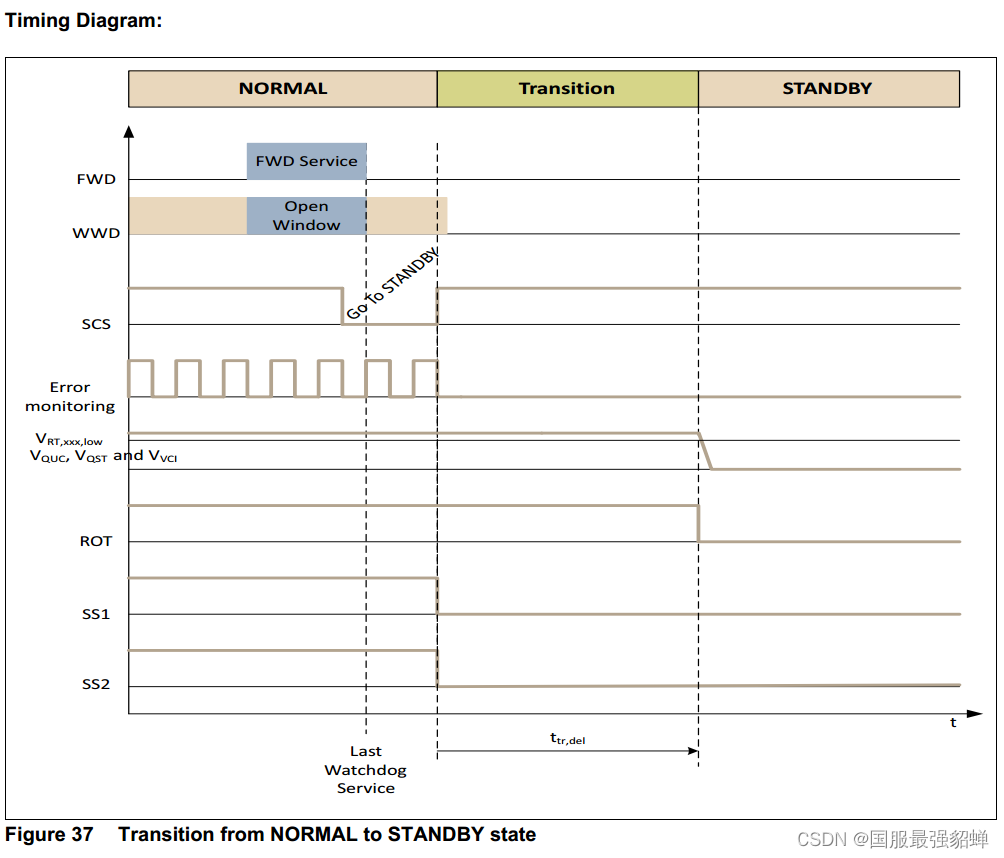
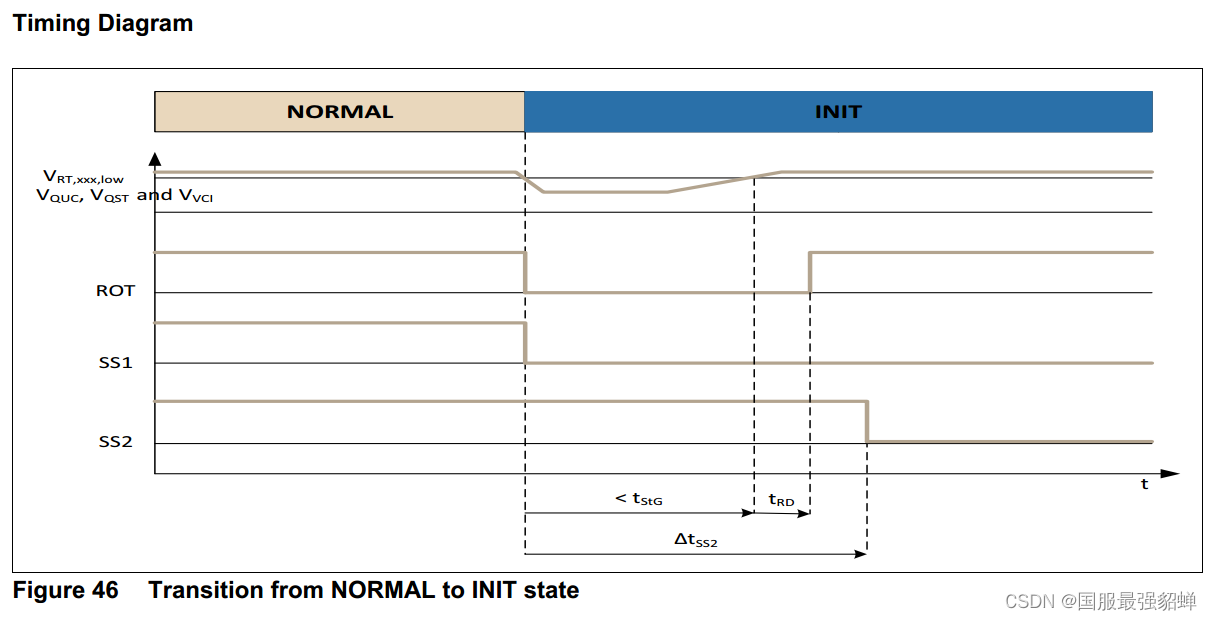
11.3.4.1 NORMAL -> STANDBY
先决条件:
• 选择LDO_µC 电流监视器或绝对转换定时器。
• 需要配置转换计时器或使用默认值。
• (可选)需要定义LDO_μC 电流阈值或使用默认值。
触发事件:
• 状态转换仅由SPI 命令“转至待机”启动。
例外:
• 如果在到待机状态的转换过程中检测到有效的 ENA(边沿)或 WAK(电平)信号,则器件将转至 INIT 状态并生成复位 (ROT)。
• 如果 LDO_µC 电流监视器已激活,且在转换延迟定时器 ttr,del 到期之前微控制器的电流消耗不低于所选 LDO_µC 电流阈值,则器件将转至 INIT 状态并生成复位 (ROT) 。
• 在应用SPI 命令“Go to STANDBY”之前,应维修看门狗(如果正在使用),以便SCS 信号的上升沿位于窗口看门狗的“关闭窗口”之间。建议这样做,以避免丢失看门狗触发和转换命令“转至待机”之间的干扰。
• SPI 命令“Go to STANDBY”启动转换后,片选(引脚 SCS)的上升沿。
当片选为高电平时,安全状态信号 SS1 和 SS2 被拉至零,SS1 和 SS2 之间没有延迟。设备离开正常状态并进入过渡状态(到待机状态)。(必须考虑根据表18 的安全状态输出的内部反应时间)
• 当芯片选择(引脚SCS)为高电平时,错误监控(引脚ERR)停止- 切换可能以引脚SCS 的正边沿结束。
• 窗口看门狗和功能看门狗的监视随着引脚SCS 的上升沿停止。
• 从正常状态成功转换到待机状态后,在片选(引脚SCS)变高后的转换时间后,复位(ROT)被拉至低电平。
• 所有前置稳压器和所有后置稳压器(备用 LDO 除外 - 在STANDBY状态下可能打开或关闭)在复位 (ROT) 拉低后转换完成时关闭.
• 如果选择绝对转换定时器,则器件会在转换延迟时间ttr,del 之后从转换状态移至待机状态。过渡时间 ttr,del 可通过 SPI 命令确定,范围为 100 µs 至 1.6 ms,默认设置为 900 µs。
• 如果选择LDO_μC 电流监视器进行转换,则在转换延迟定时器ttr,del 到期之前,当LDO_μC 处测得的电流消耗降至所选阈值以下时,器件从转换状态移至待机状态。
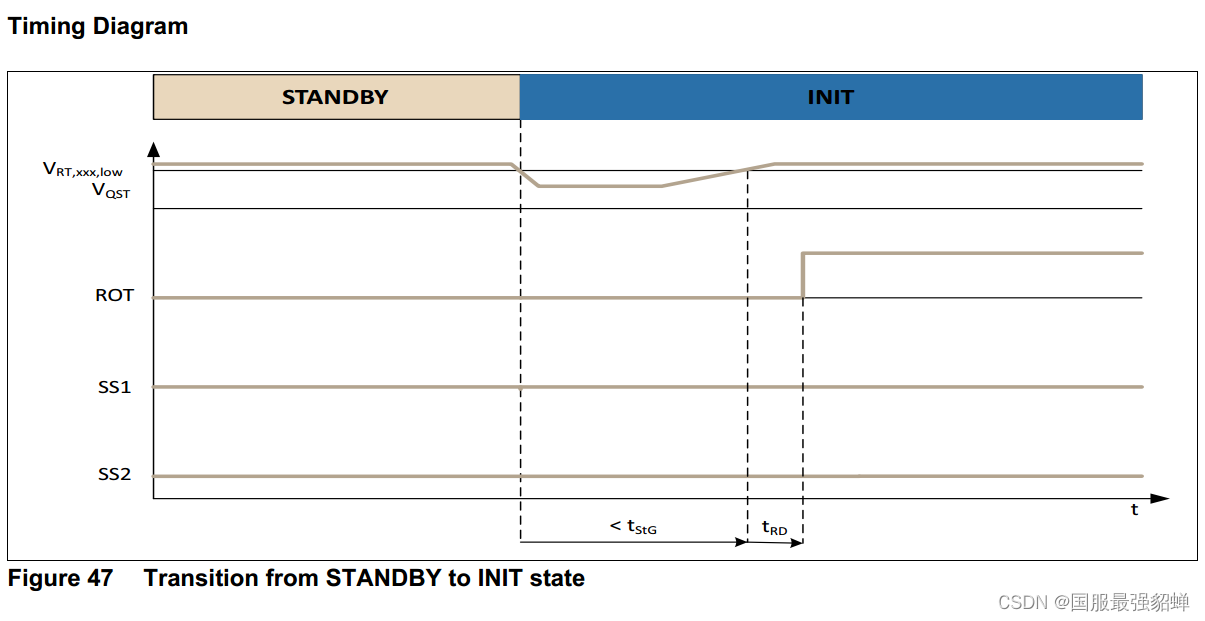
11.3.4.2 STANDBY -> INIT
先决条件:
• 无
触发事件:
• 有效的ENA(边沿)或WAK(电平)信号。
• 唤醒定时器Wake-up timer到期(如果已启用)
例外:
• 无
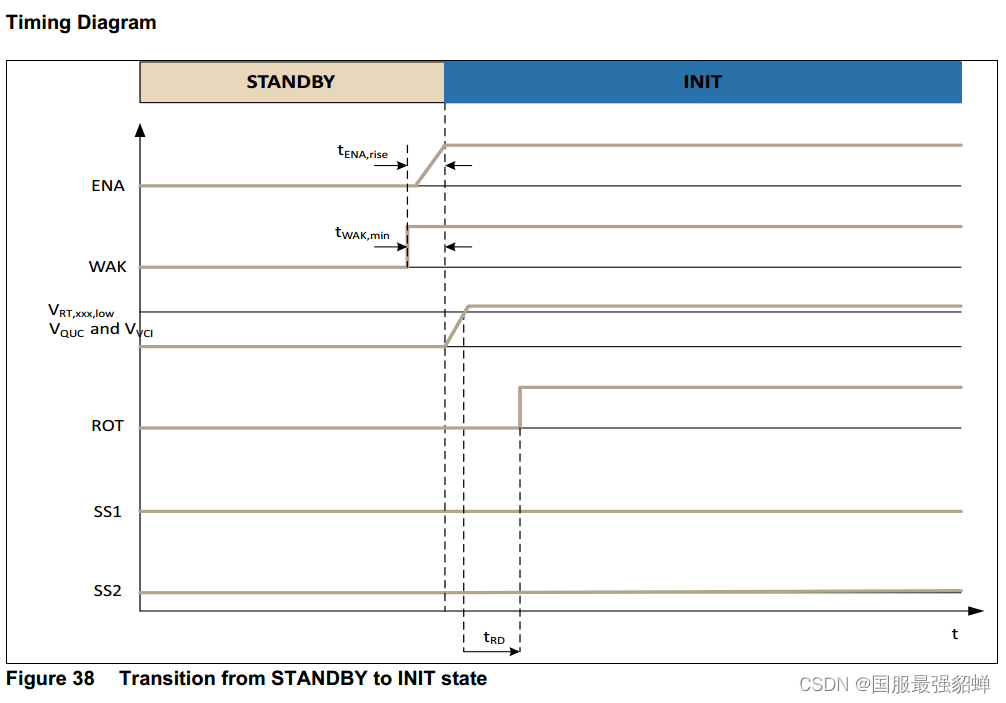
• 所有前置稳压器和所有后置稳压器均根据电源排序开启,但LDO_Stby 根据其配置保持开启或关闭(上图已简化)。
• 一旦最新的μC 相关稳压器VQUC 或VVCI(如果启用)越过相关欠压复位阈值VRT,xxx,low,上电复位延迟时间就会开始。
• 上电复位延迟时间结束后,复位(ROT) 设置为高电平。
• 安全信号SS1 和SS2 在STANDBY 状态和INIT 状态下将保持低电平。
11.3.4.3 INIT -> NORMAL
对于该状态转换请参考第 11.3.2 章。
11.3.5 NORMAL -> WAKE
该状态转换请参考11.6.1 章ABIST 的描述。
11.3.6 WAKE -> NORMAL
先决条件:
• 如果它们在 WAKE 状态下重新启动/重新初始化(例如,看门狗在先前的 SLEEP 状态下不活动) ,激活的监控功能(例如窗口看门狗、功能看门狗、ERR 引脚监控)需要在激活的 WAKE 状态下至少维护一次(ERR 监控至少 3 个周期)
触发事件:
• 状态转换仅由 SPI 命令“Go to NORMAL”启动。
例外:
• 无
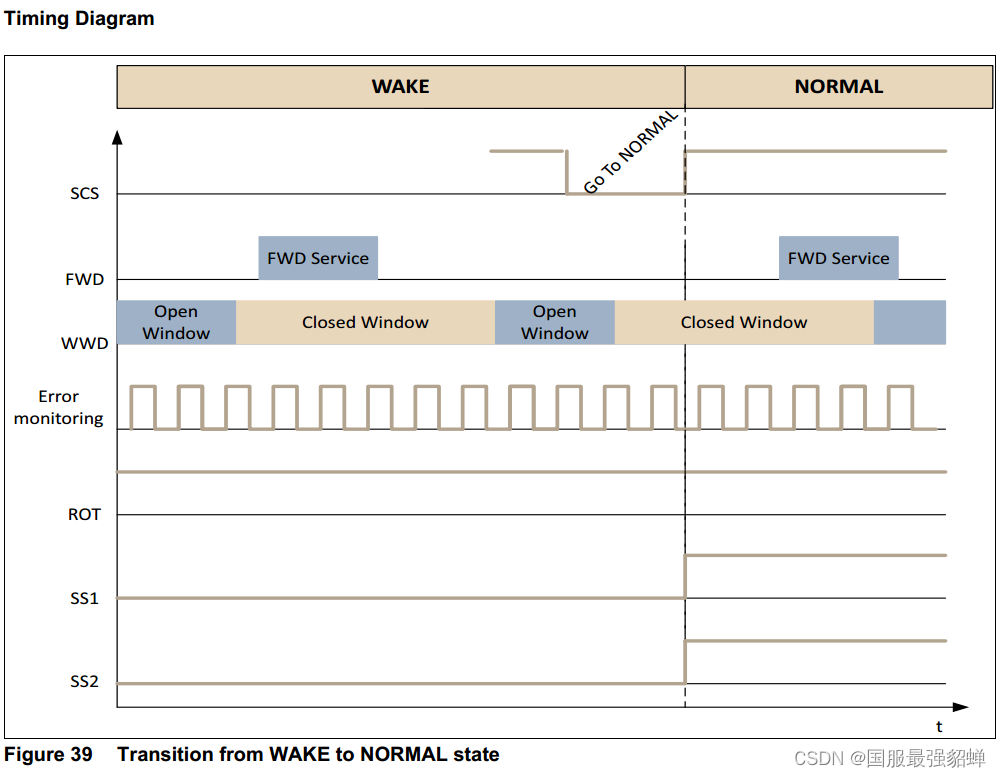
• 启用信号将被忽略。有效的使能(边沿)信号不会将器件从唤醒状态移至正常状态。
• 唤醒信号的状态将被忽略。有效的唤醒(电平)信号不会将器件从唤醒状态移至正常状态。
• 窗口看门狗(如果在WAKE 状态下处于活动状态)将需要连续服务- 与从WAKE 状态到NORMAL 状态的转换不同步。
• 功能性看门狗(如果在WAKE 状态下处于活动状态)将需要连续服务- 与从WAKE 状态到NORMAL 状态的转换不同步。
• 错误监控(在引脚ERR 处)(如果在WAKE 状态下激活)将需要连续切换信号- 与从WAKE 状态到NORMAL 状态的转换不同步- 但检测到至少3 个周期以接受进入NORMAL 状态的移动。
• 当后置稳压器在唤醒状态和正常状态下处于活动状态时,复位引脚 ROT 保持高电平。
• 随着片选高电平的上升沿(在引脚SCS 处),安全状态信号SS1 和SS2 同时被拉至高电平。 (必须考虑表 18 中安全状态输出的内部反应时间)
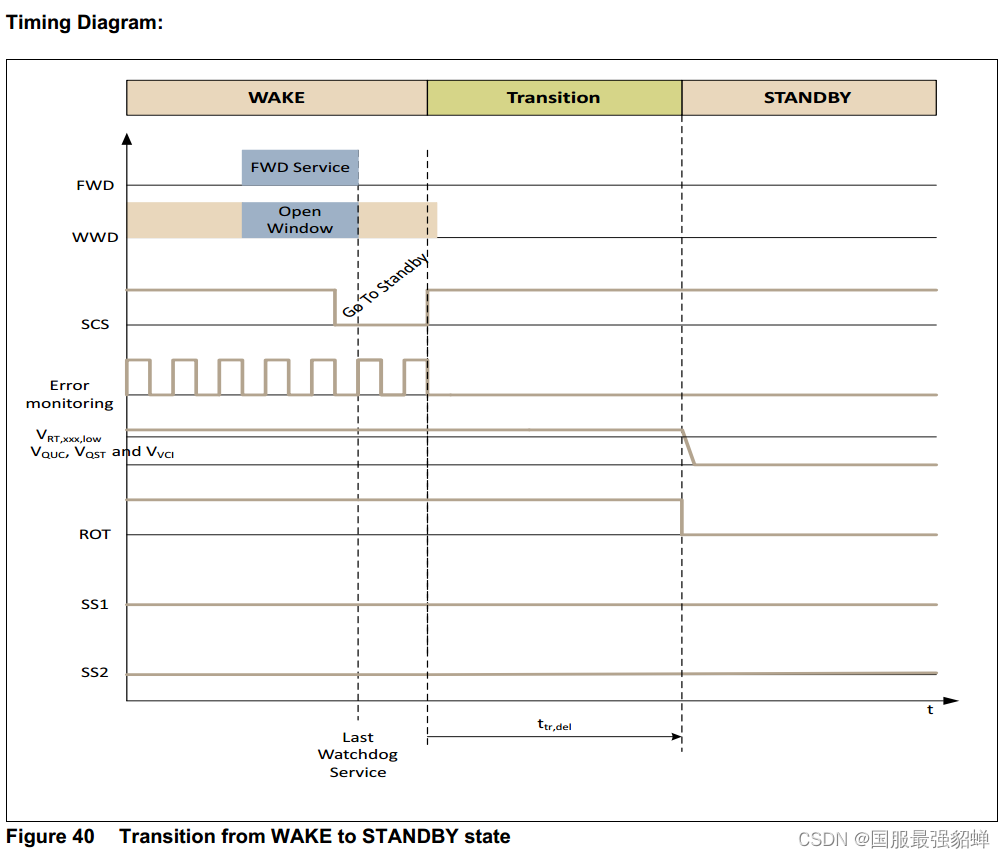
11.3.7 WAKE -> STANDBY
先决条件:
• 选择LDO_μC 电流监视器或绝对转换定时器。
• 需要配置转换计时器或使用默认值。
• (可选)需要定义LDO_μC 电流阈值或使用默认值。
触发事件:
• 状态转换仅由SPI 命令“Go to STANDBY”启动。
例外:
• 如果在到待机状态的转换过程中检测到有效的 ENA(边沿)或 WAK(电平)信号,则器件将转至 INIT 状态并生成复位 (ROT)。
• 如果LDO_μC 电流监视器已激活,并且在转换定时器到期之前微控制器的电流消耗不低于所选电流阈值,则器件将转至INIT 状态并生成复位(ROT)。
• 在应用SPI 命令“Go to STANDBY”之前,应维修看门狗(如果正在使用),以便SCS 信号的上升沿位于窗口看门狗的“关闭窗口”之间。建议这样做,以避免丢失看门狗触发和转换命令“转至待机”之间的干扰。
• SPI 命令“Go to STANDBY”启动转换后,片选(引脚 SCS)的上升沿。在唤醒状态下,安全状态信号 SS1 和 SS2 为低电平,并且在转换到待机状态时将保持低电平。设备离开 WAKE 状态并进入转换状态(到 STANDBY 状态)。
• 当片选(引脚SCS)为高电平时,错误监控(引脚ERR)停止——切换可能会随着引脚SCS 的上升沿而结束。
• 窗口看门狗和功能看门狗的监视随着引脚SCS 的上升沿停止。
• 当从唤醒状态成功转换到待机状态时,在片选(引脚SCS)变高后的转换时间后,复位(ROT)被拉至低电平。
• 所有前置稳压器和所有后置稳压器(备用LDO 除外——在备用状态下可能打开或关闭)在复位(ROT) 拉低后转换完成时关闭。
• 如果选择绝对转换定时器,则器件会在转换时间ttr,del 之后从转换状态移至待机状态。过渡时间 ttr,del 可通过 SPI 命令确定,范围为 100 µs 至 1.6 ms,默认设置为 900 µs。
• 如果选择LDO_μC 电流监视器进行转换,则在转换延迟定时器ttr,del 到期之前,当LDO_μC 处测得的电流消耗降至所选阈值以下时,器件从转换状态移至待机状态。
11.3.8 FAILSAFE -> INIT
先决条件:
• FAILSAFE 定时器已到期。
触发事件:
• 满足先决条件后自动触发的转换。
• 有效的ENA(边沿)或WAK(电平)信号(仅当异常为真时才需要)
例外:
• 如果连续三次进入FAILSAFE 并出现相同的故障,则自触发转换将被阻止。
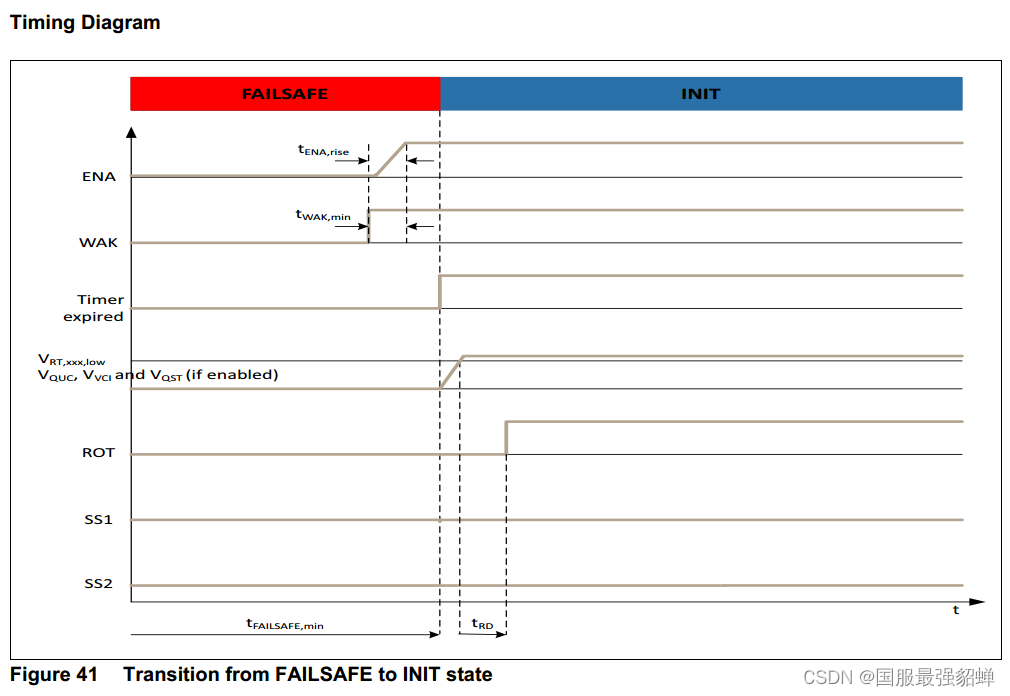
• 器件从FAILSAFE 状态到INIT 状态的转换最早在最短FAILSAFE 时间tFAILSAFE,min 之后发生,对于除热关断之外的所有故障,该时间为20 ms。如果发生热关断,最小故障安全时间 tFAILSAFE,min 为 1s。在最小 FAILSAFE 时间 tFAILSAFE,min 到期之前进行转换的命令将不会被执行。
• 进入INIT 状态后,电压调节器将根据电源排序逐渐升高。
• 一旦最新的μC 相关稳压器VQUC、VVCI 或VQST(根据之前的配置)越过相关的欠压复位阈值VRT,xxx,low,上电复位延迟时间就会开始。
• 上电复位延迟时间结束后,复位(ROT) 设置为高电平。
• 需要配置和启动设备。除了 LDO_Stby (RSYSPCFG0) 和复位延迟时间 (DEVCFG1) 的配置之外,器件进入 FAILSAFE 状态之前在配置寄存器中完成的所有设置都会丢失。
• 安全状态信号 SS1 和 SS2 在 FAILSAFE 状态下为低电平,在 INIT 状态下为低电平
11.4 Reaction on detected faults 对检测到的故障的反应
错误根据其严重性分为 4 种不同的错误类别:
• 保持当前状态 - 影响外设且不会给微控制器带来直接风险的故障,由中断指示,允许微控制器在不更改状态的情况下进行分析。
• 移至INIT - 中等严重性错误,使器件返回INIT 状态并为微控制器生成复位。
• 转向FAILSAFE - 严重错误,具有损坏微控制器的高风险。
• 转向断电 - 最严重的错误,具有损坏我们自己和微控制器的高风险。错误类别根据其严重程度被否决,例如向 POWERDOWN 的移动优先于向 FAILSAFE 的移动,而向 FAILSAFE 的移动则优先于向 INIT 的移动。
在本文档中,向 INIT、FAILSAFE 和 POWERDOWN 错误的转移被称为“错误触发状态转换” “error triggered state transitions” 。
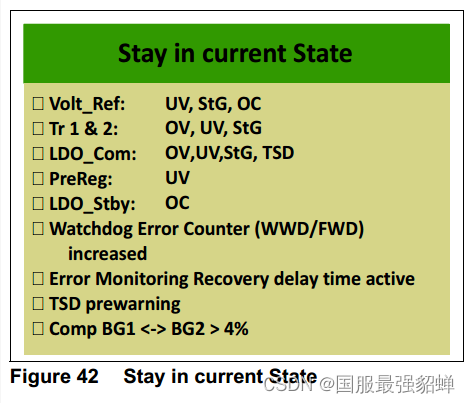
11.4.1 Stay in current State 保持当前状态
 以下故障本身不会触发器件移动到另一种状态,但会通过中断事件指示故障:
以下故障本身不会触发器件移动到另一种状态,但会通过中断事件指示故障:
• 检测到电压参考欠压或接地短路或过载检测
• 检测到过压、欠压跟踪器 1 或 2 处的电压或对地短路
• 检测 LDO_Com 处的过压、欠压、对地短路或热关断
• 检测预调节器处的欠压。
• 检测到备用稳压器过载。
• 窗口/功能看门狗状态计数器增加,但实际值仍低于阈值。
• 错误监控恢复延迟时间处于活动状态,并且 ERR 信号停止切换。
• 热关断预警(降压预调节器或/和 LDO_µC 或/和 LDO_Com)
• 带隙监控:如果两个带隙之间的偏差大于 4% 。
由于在 STANDBY 和 FAILSAFE 状态下,中断可能在 INT 引脚上不可见微控制器电源被关闭。事件存储在状态标志中(IF、SYSSF、MONSF0、MONSF1、MONSF2、OTWRNSF、OTFAIL)
11.4.2 Transition into INIT State
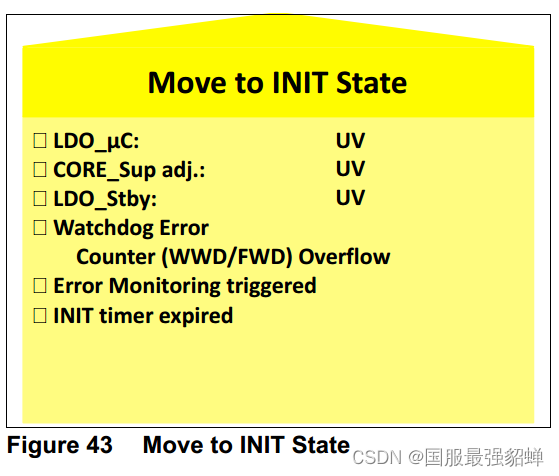
以下故障将使器件从任何状态进入 INIT 状态:
• 检测到 LDO_μC、Core_Sup adj 欠压,或 LDO_Stby
• 检测到窗口/功能看门狗状态计数器溢出
• 检测到错误信号停止(立即反应模式)或检测到停止或错误信号超过恢复延迟时间(恢复模式)
• INIT 定时器连续一次或两次到期( INIT状态下配置失败)
11.4.2.1 INIT -> INIT state due to detected fault
11.4.2.1.1 INIT -> INIT-state due to INIT timer expired for the first time 由于 INIT 定时器第一次到期而导致 INIT -> INIT 状态
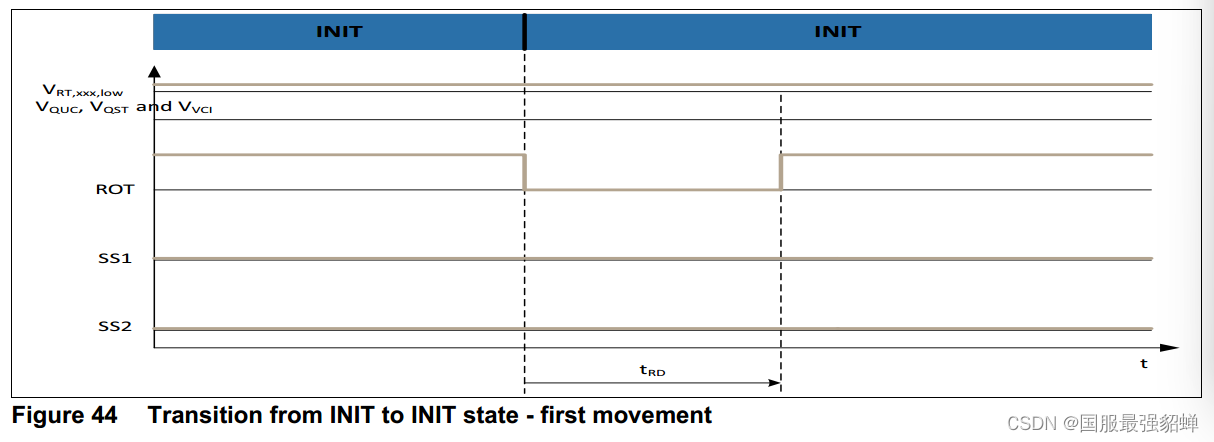
描述:
• 器件第一次从INIT 转换到INIT 状态(或保持在INIT 状态)正在发出“软复位”。如果所有 µC 相关电压都在有效范围内,则引脚 ROT 在复位延迟时间 tRD 内被拉至低电平。进入 INIT 状态后启动电源序列:禁用的输出重新激活,其他输出保持启用,但 LDO_Stby 将保持其配置为 ON 或 OFF。
11.4.2.1.2 INIT -> INIT-state due to INIT timer expired for the second time 由于 INIT 定时器第二次到期而导致 INIT -> INIT 状态
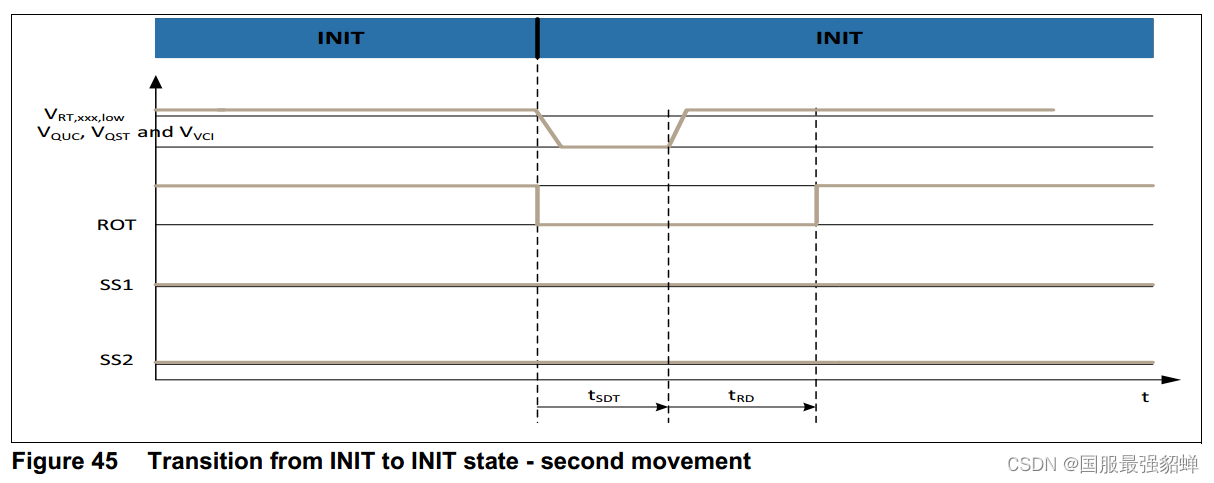
说明:
• 器件第二次从 INIT 状态转换到 INIT 状态(或保持 INIT 状态)发出“硬复位” - 引脚 ROT 被拉至低电平,所有输出在时间 t 内被禁用,并根据电源排序(请参阅第 8.3 章),但 LDO_Stby 将恢复其配置为 ON 或 OFF。
• ROT 引脚将根据使用复位延迟时间trd 的电源排序被释放。
注意:另请参阅 INIT 到 FAILSAFE 的转换
11.4.2.2 NORMAL -> INIT state due to detected fault
说明:
• 器件从NORMAL 转换到INIT 状态,发出“软复位”- 引脚ROT 被拉至低电平,所有输出均启用,但LDO_Stby 除外,将保持其配置为ON 或OFF。在正常状态下禁用的输出将再次打开。
• 这可能是由μC 相关电压VQUC、VQST 或VVCI 欠压引起的,如图所示。欠电压短于对地短路检测时间 tStG。一旦所有 µC 相关电压 VQUC、VQST 或VVCI 回到有效范围内,复位延迟时间 tRD 就会开始。 ROT 引脚相应地被释放。长于对地短路检测时间 tStG 的欠压将首先导致从 NORMAL 状态转变为 INIT 状态,然后在对地短路检测时间 tStG 到期后,导致从 INIT 状态转变为 FAILSAFE 状态。
• “软复位”也可以通过窗口看门狗错误计数器溢出 (> ΣWWD)、功能看门狗错误计数器溢出 (> ΣFWO)、错误指示(立即或恢复延迟时间模式)来启动,如果这些监视功能是正在使用。在这种情况下,复位延迟时间 tRD 将从 ROT 引脚的下降沿开始。请考虑表 11-8 中到 INIT 状态的状态转换时间。
• SS1 将立即通过引脚ROT 拉至低电平,SS2 将在选定的ΔtSS2 之后拉至低电平。
• 请注意,如果QUC 上发生UV 事件,延迟的SS2 信号将跟随VQUC,因为它是由QUC 提供的。
注意:如果设备在配置的 ΔtSS2 到期之前返回正常状态,SS2 将保持高电平而不设置为低电平。
11.4.2.3 STANDBY -> INIT state due to detected fault
说明:
• 如图所示,由于 µC 相关电压 VQST 电压过低,器件从 STANDBY 转换为 INIT。欠电压短于对地短路检测时间 tStG。长于对地短路检测时间 tStG 的欠压将首先导致从 STANDBY 状态转变为 INIT 状态,然后在对地短路检测时间 tStG 到期后,导致从 INIT 状态转变为 FAILSAFE 状态。
• 进入INIT 状态后启动电源序列:禁用的输出将重新激活,但LDO_Stby 将保持其配置为ON 或OFF。
• 上电复位延迟时间根据上电顺序开始,并相应地释放ROT。
• 安全状态信号SS1 和SS2 在STANDBY 状态下为低电平,并且在INIT 状态下为低电平。
例外:
• 例外:如果内部电源电压过压或欠压,始终会启动“硬复位”。请参阅第 8.3 章。
11.4.2.4 SLEEP -> INIT state due to detected fault
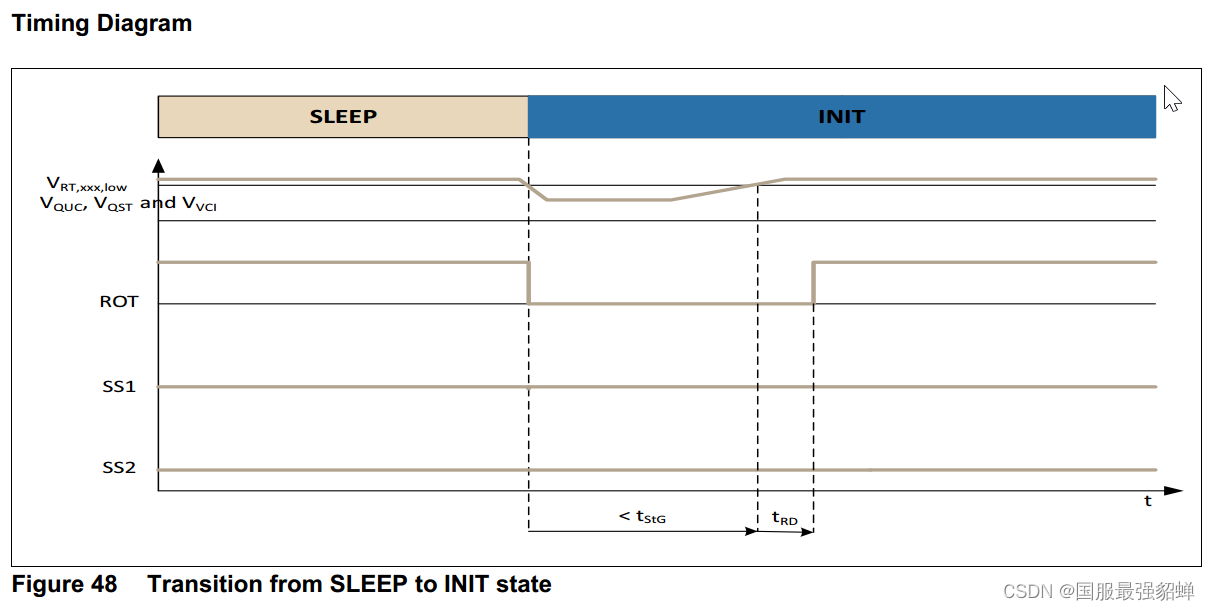
说明:
• 器件从睡眠状态转换到初始化状态,发出“软复位”- 引脚 ROT 被拉至低电平并持续一定时间 tRD,并且所有输出保持启用状态。在睡眠状态下禁用的输出将再次打开,但 LDO_Stby 将保持其配置为打开或关闭。
• 这可能是由μC 相关电压VQUC、VQST 或VVCI 欠压引起的,如图所示。欠电压短于对地短路检测时间 tStG。一旦所有 µC 相关电压 VQUC、VQST 或 VVCI 回到有效范围内,复位延迟时间 tRD 就会开始。 ROT 引脚相应地被释放。长于对地短路检测时间 tStG 的欠压将首先导致从 SLEEP 状态转换到 INIT 状态,然后在对地短路检测时间 tStG 结束后,从 INIT 转换到 FAILSAFE 状态
• “软复位”如果正在使用这些监视功能,也可以通过窗口看门狗错误计数器溢出 (> ΣWWO)、功能看门狗错误计数器溢出 (> ΣFWO)、错误指示(立即或恢复延迟时间模式)来启动。在这种情况下,复位延迟时间 tRD 将从 ROT 引脚的下降沿开始。请考虑表 11-8 中到 INIT 状态的状态转换时间。
• 安全状态信号SS1 和SS2 在SLEEP 状态下为低电平,并且在INIT 状态下为低电平。
例外:
• 例外:如果内部电源电压过压或欠压,始终会启动“硬复位”。请参阅第 8.3 章。
11.4.2.5 WAKE -> INIT state due to detected fault
说明:
• 器件从 WAKE 状态转换为 INIT 状态,发出“软复位”- 引脚 ROT 被拉至低电平并持续一定时间 tRD,并且所有输出保持启用状态。在 WAKE 状态下禁用的输出将再次打开,但 LDO_Stby 将保持其配置为 ON 或 OFF。
• 这可能是由μC 相关电压VQUC、VQST 或VVCI 欠压引起的,如图所示。欠电压短于对地短路检测时间 tStG。一旦所有 µC 相关电压 VQUC、VQST 或 VVCI 回到有效范围内,复位延迟时间 tRD 就会开始。 ROT 引脚相应地被释放。长于对地短路检测时间 tStG 的欠压将首先导致从 WAKE 状态转变为 INIT 状态,然后在对地短路检测时间 tStG 到期后,导致从 INIT 状态转变为 FAILSAFE 状态。
• “软复位”也可以通过窗口看门狗错误计数器溢出 (> ΣWWO)、功能看门狗错误计数器溢出 (> ΣFWO)、错误指示(立即或恢复延迟时间模式)来启动,如果这些监视功能是正在使用。在这种情况下,复位延迟时间 tRD 将从 ROT 引脚的下降沿开始。请考虑表 11-8 中到 INIT 状态的状态转换时间。
• 安全状态信号SS1 和SS2 在WAKE 状态下为低电平,在INIT 状态下为低电平。
例外:
• 例外:如果内部电源电压过压或欠压,始终会启动“硬复位”。请参阅第 8.3 章。
11.4.3 Transition into FAILSAFE State
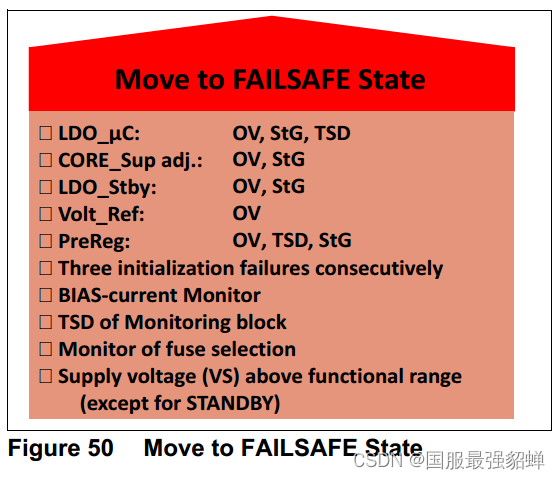
以下故障将使器件从任何状态进入故障安全状态:
• 检测到LDO_μC 过压、接地短路或热关断
• 检测到Core_Sup adj 或 LDO_Stby过压或接地短路。
• 检测到基准电压过压
• 检测到过压、接地短路 (仅在 INIT 状态的启动阶段)或预稳压器的热关断。 在 INIT 状态下的上电排序后(一旦高于 UV 阈值)检测到的预调节器对 GND 短路不会被视为“移至 FAILSAFE”事件,但该事件将存储在 MONSF0.PREGSG 中,而不会产生中断。
• 连续 3 次初始化失败(例如 INIT 状态下的配置失败)
• 偏置电流监控器故障
• 由于监控块温度过高而导致过温停机。
• 熔丝选择监视器故障
• 电源引脚 (VS) 处的过压将触发过压保护并使器件进入故障安全状态(待机状态除外)
11.4.3.1 INIT -> FAILSAFE state due to detected fault
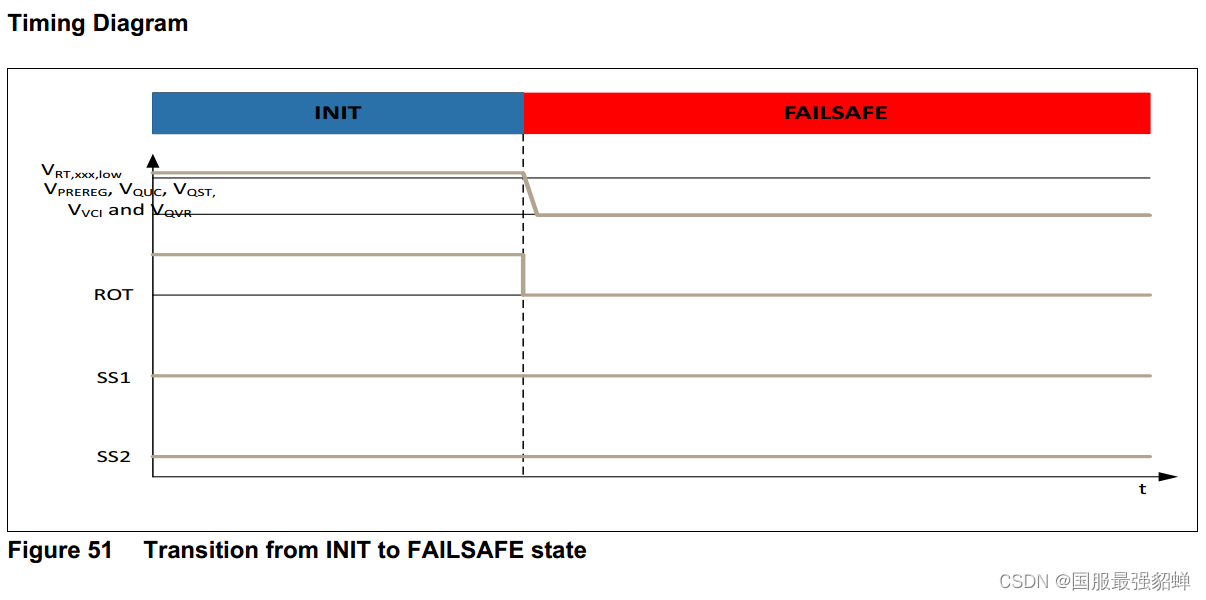
描述:
• 第 11.4.3 章中提到的任何故障(外部或内部)情况都会启动从 INIT 状态到 FAILSAFE 状态的转换。
• 一旦检测到MoveToFailsafe 故障之一,引脚ROT 将被拉至低电平(如果尚未因μC 相关调节器上的欠压而拉至低电平)。
• 当器件从INIT 进入FAILSAFE 状态时,所有稳压器都将被关闭,无论它们是否处于过压状态。
• 安全状态信号SS1 和SS2 在INIT 状态下为低电平,在FAILSAFE 状态下为低电平。
11.4.3.2 XXXX -> INIT -> FAILSAFE state due to detected fault
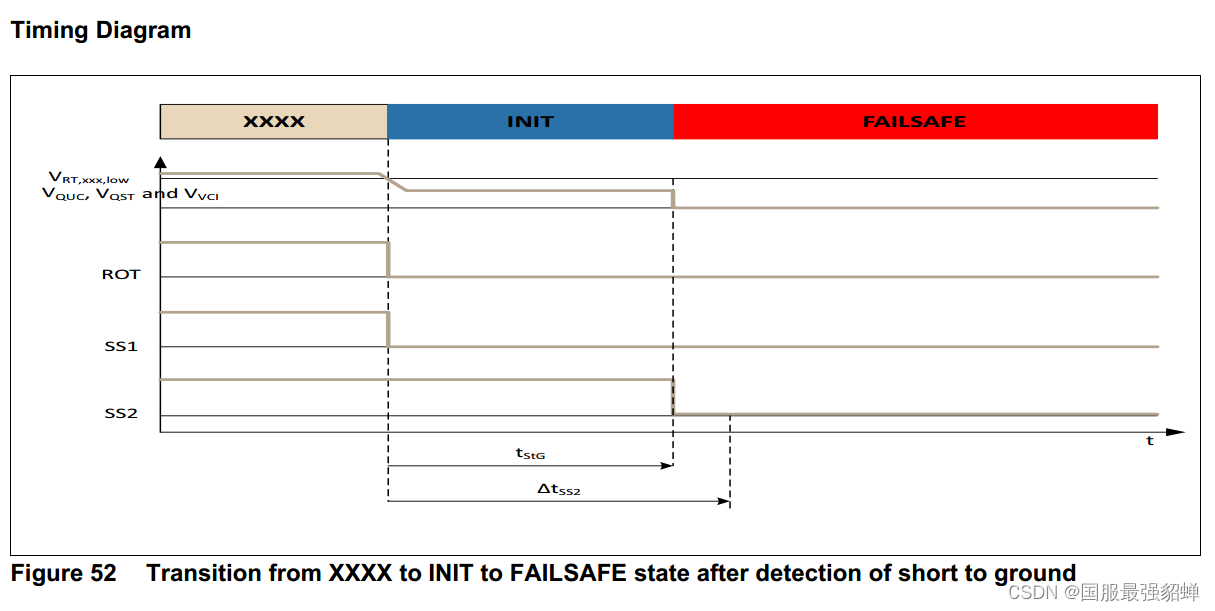
说明:
• 检测到如图所示的μC 相关电压VQUC、VQST 或VVCI 的欠压将启动向INIT 状态的转换。 (请参阅前一章转换到 INIT 状态)
• 一旦检测到欠压(在上述一个或多个稳压器中 - 以第一个为准),引脚 ROT 将被拉至低电平。
• 安全状态信号 SS1 将被拉至低电平,与引脚 ROT 一起拉至低电平。
• 如果对地短路持续时间长于对地短路检测时间 tStG,则检测到对地短路事件。
• 一旦检测到接地短路,所有稳压器将立即关闭,无论它们是否处于欠压状态。
• 器件从 INIT 状态进入 FAILSAFE 状态。
• 即使延迟时间 ΔtSS2 尚未到期,安全状态信号 SS2 将随着从 INIT 状态转换到 FAILSAFE 状态而被拉至低电平,因为 LDO_μC 已关闭(LDO_μC 已关闭)。在 INIT 状态下打开,但在 FAILSAFE 状态下关闭)。
11.4.3.3 NORMAL -> FAILSAFE state due to detected fault
说明:
• 如图所示,检测到预稳压器电压VPREREG 或μC 相关电压VQUC、VQST、VVCI 或VQVR 过压将启动从NORMAL 状态到FAILSAFE 状态的转换。
• 一旦检测到过压事件(在上述一个或多个调节器处 - 以第一个为准),引脚 ROT 将被拉至低电平。
• 当器件从正常状态转入故障安全状态时,所有稳压器都将关闭,无论它们是否处于过压状态。
• 由于LDO_μC 已关闭,安全状态信号将立即拉至低电平,同时引脚ROT 变为低电平。
• 从NORMAL 状态到FAILSAFE 状态的转换将由第11.4.3 章中提到的任何故障(外部或内部)情况启动。
• 如图52 所示,检测到μC 相关电压VQUC、VQST、VVCI 对地短路时,首先将检测为欠压事件,并将器件从正常状态移至初始化状态。在对地短路检测时间 tStG 之后,器件将从 INIT 状态转移到 FAILSAFE 状态(请参阅从 INIT 状态到 FAILSAFE 状态的转换)。
11.4.3.4 STANDBY -> FAILSAFE state due to detected fault
说明:
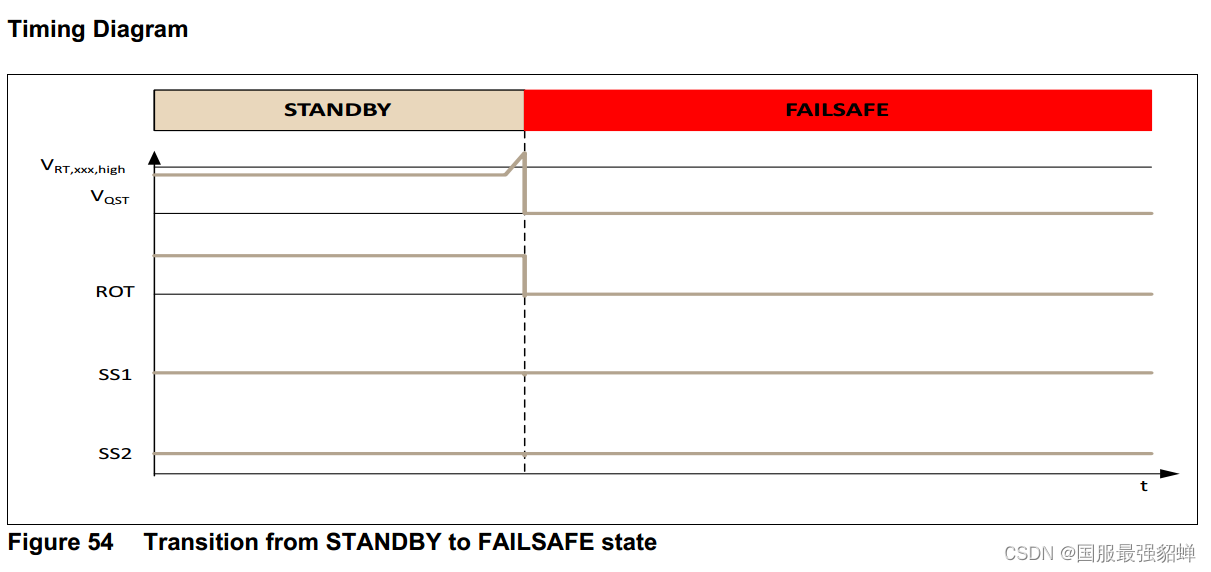
• 检测到如图所示的μC 相关电压VQST 的过压将启动从STANDBY 状态到FAILSAFE 状态的转换。
• 引脚ROT 在待机状态下为低电平,在故障安全状态下将保持低电平。
• 安全状态信号SS1 和SS2 在STANDBY 状态下为低电平,在FAILSAFE 状态下为低电平。
• 除了上面的示例之外,从待机状态到故障安全状态的转换是由内部偏置电流监视器故障启动的。
• 如图52 所示,检测到μC 相关电压VQUC、VQST、VVCI 对地短路时,首先将检测为欠压事件,并将器件从待机状态移至初始化状态。在对地短路检测时间 tStG 之后,器件将从 INIT 状态转移到 FAILSAFE 状态(请参阅从 INIT 状态到 FAILSAFE 状态的转换)。
11.4.3.5 SLEEP -> FAILSAFE state due to Fault
说明:
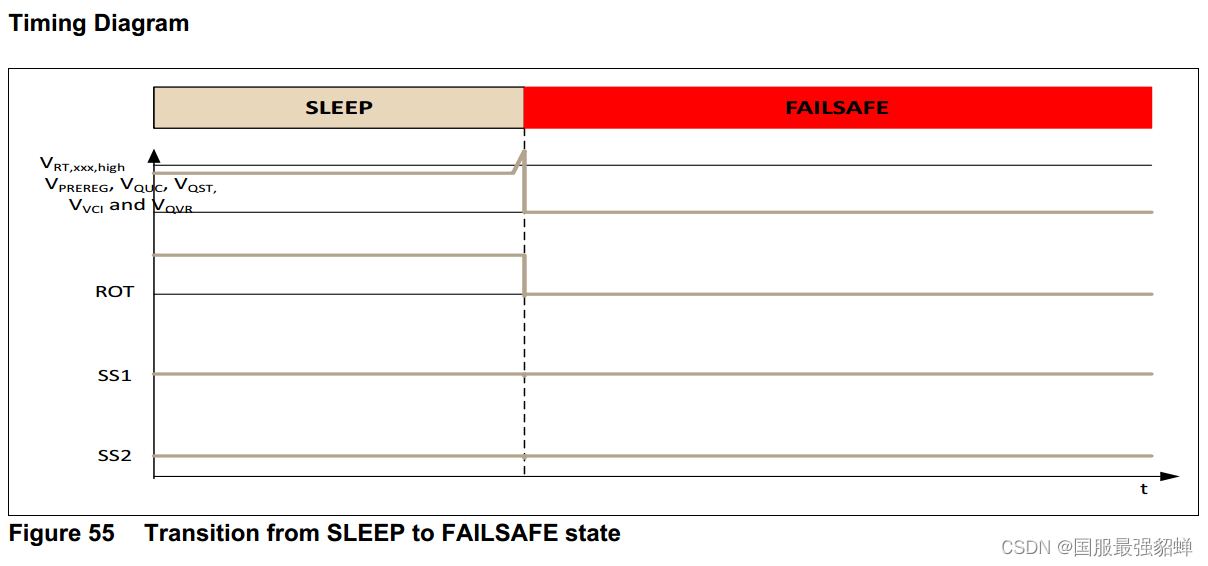
• 如图所示,检测到预稳压器电压VPREREG 或μC 相关电压VQUC、VQST、VVCI 或VQVR 过压将启动从SLEEP 状态到FAILSAFE 状态的转换。
• 一旦检测到过压事件(在上述一个或多个调节器处 - 以第一个为准),引脚 ROT 将被拉至低电平。
• 当器件从睡眠状态转入故障安全状态时,所有稳压器都将关闭,无论它们是否处于过压状态。
• 与睡眠状态一样,安全状态信号将保持为低电平。
• 从SLEEP 状态到FAILSAFE 状态的转换将由第11.4.3 章中提到的任何故障(外部或内部)情况启动。
• 如图52 所示,检测到μC 相关电压VQUC、VQST、VVCI 对地短路时,首先将检测为欠压事件,并将器件从休眠状态移至初始化状态。在对地短路检测时间 tStG 之后,器件将从 INIT 状态转移到 FAILSAFE 状态(请参阅从 INIT 状态到 FAILSAFE 状态的转换)。
11.4.3.6 WAKE -> FAILSAFE state due to detected fault
说明:
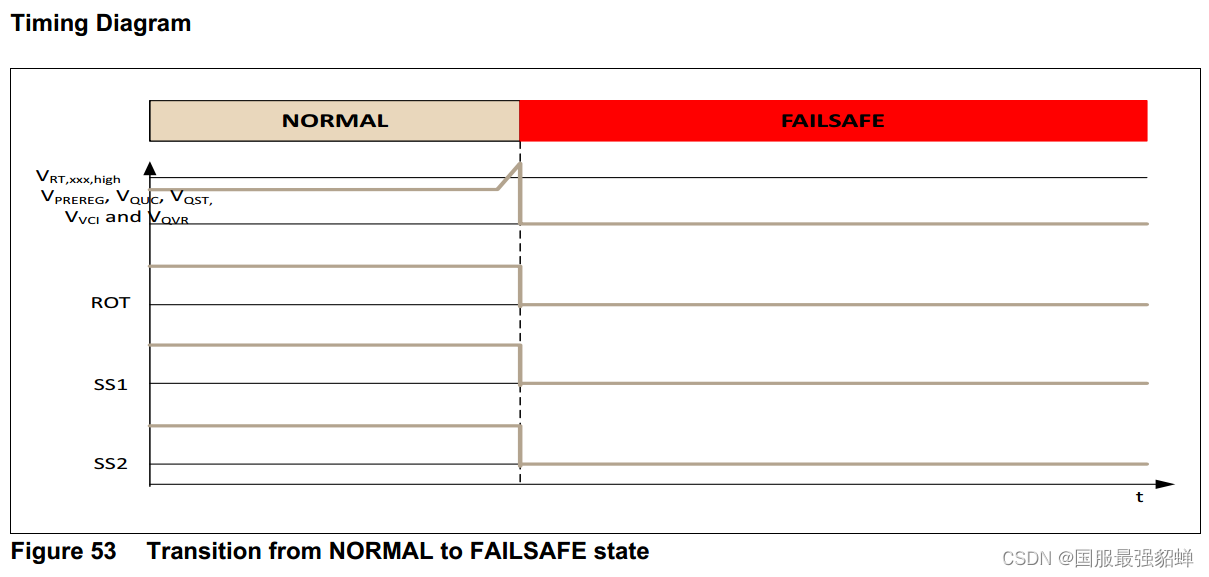
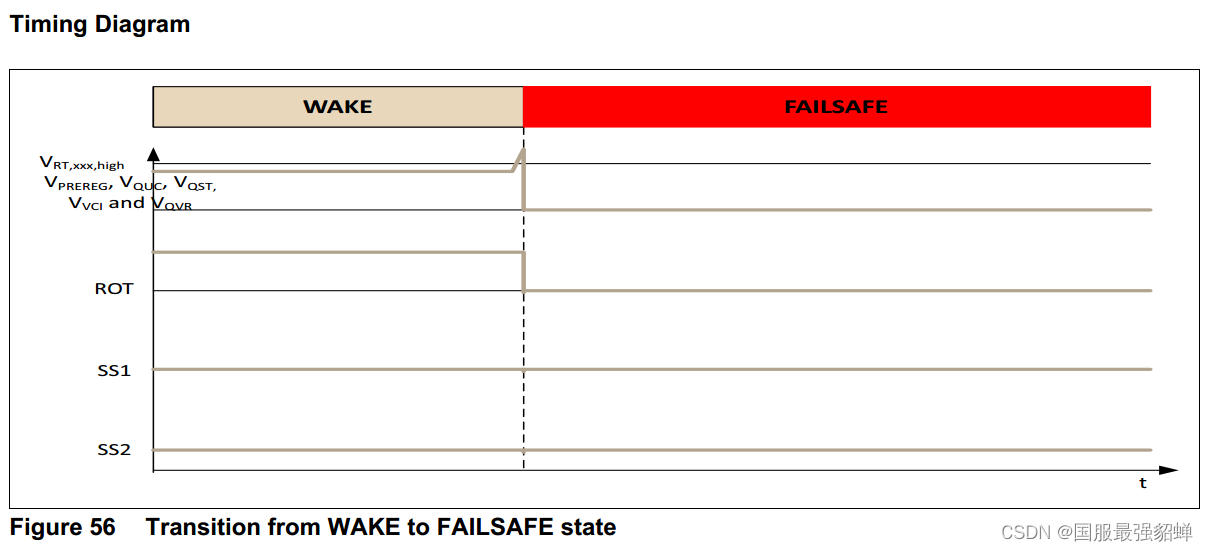
• 如图所示,检测到预稳压器电压VPREREG 或μC 相关电压VQUC、VQST、VVCI 或VQVR 过压将启动从WAKE 状态到FAILSAFE 状态的转换。
• 一旦检测到过压事件(在上述一个或多个调节器处 - 以第一个为准),引脚 ROT 将被拉至低电平。
• 当器件从WAKE 状态转入FAILSAFE 状态时,所有调节器都将被关闭,无论它们是否处于过压状态。
• 安全状态信号将像唤醒状态一样保持在低电平。
• 从WAKE 状态到FAILSAFE 状态的转换将由第11.4.3 章中提到的任何故障(外部或内部)情况启动。
• 如图52 所示,检测到μC 相关电压VQUC、VQST、VVCI 的接地短路将首先被检测为欠压事件,并将器件从WAKE 状态移至INIT 状态。在对地短路检测时间 tStG 之后,器件将从 INIT 状态转移到 FAILSAFE 状态(请参阅从 INIT 状态到 FAILSAFE 状态的转换)。
11.4.3.7 Transition into FAILSAFE state due to thermal shutdown
由于热关断而转变为 FAILSAFE 状态
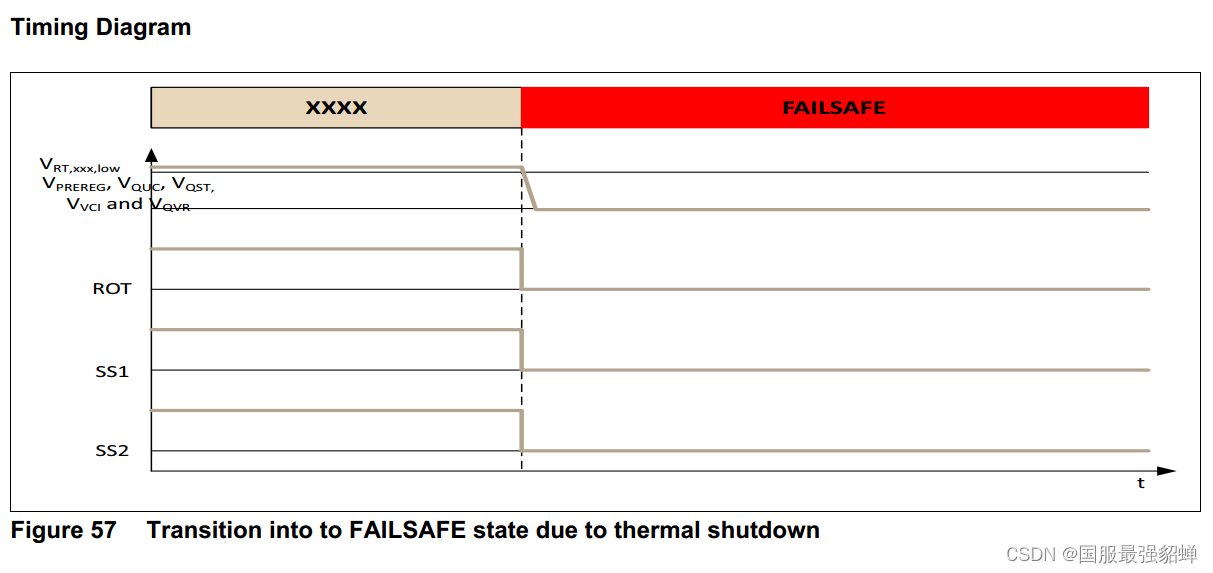
说明:
• 从任何状态到FAILSAFE 状态的转换都将由热关断(TSD) 启动。
• 一旦检测到热关断,引脚ROT 将被拉至低电平。
• 当设备从xxx 进入FAILSAFE 状态时,所有调节器将被关闭。无论它们是否处于过热状态。
• 在正常状态之外,安全状态信号 SS1 和 SS2 将立即拉至低电平,引脚 ROT 变低,因为 LDO_μC 已关闭。在任何其他状态下,安全状态信号 SS1 和 SS2 均为低电平并将保持低电平。
• 热关断 (TSD) 后,器件将保持故障安全状态至少 1 秒。
11.4.4 Transition into POWERDOWN-state
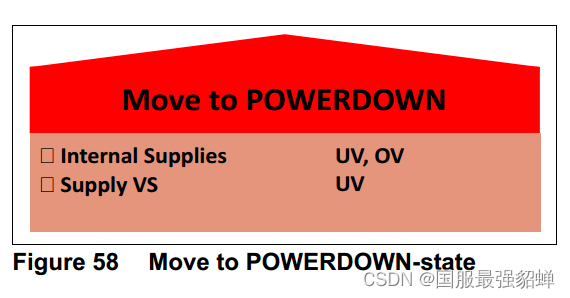
以下故障/事件将使器件始终以最高优先级进入断电状态:
• 降低时 VVS 低于 VPD,lo,min
• 检测到内部电源过压或欠压
11.5 Electrical Characteristics

11.6 (略) Built In Self Test (BIST) Features 内置自测试 (BIST) 功能
TLF35584 提供了通过内置自测试功能在外部 µC 的帮助下测试某些观察功能的选项。这些功能将在以下章节中描述。
###11.6.1 Analog Built In Self Test (ABIST)
####11.6.1.1 How to run the ABIST
####11.6.1.2 Testing the comparator logic only
####11.6.1.3 Testing the comparator logic and the corresponding deglitching logic
####11.6.1.4 Testing the complete monitoring chain (comparators, deglitching and output)
####11.6.1.5 Abort conditions for ABIST operation
###11.6.2 Logic Built In Self Test
11.7 Microcontroller Programming Support
可用于避免由于缺少窗口看门狗触发和 INIT 定时器内的错误监控而导致的定期复位触发。微控制器编程支持功能的激活应通过将 MPS 引脚拉至 5V 来完成。应在启用电压基准时尽早提供电压。因此,在微控制器编程期间将 MPS 引脚连接到输出 QVR 将是一种选择。
主动微控制器编程支持功能包括对器件正常操作的以下更改:
• INIT 定时器将停止。
• 窗口看门狗故障计数器溢出对复位ROT 的影响将被阻止。
• 功能看门狗故障计数器溢出对复位ROT 的影响将被阻止。
• 错误监控对复位ROT 的贡献将被阻止。
由于只有看门狗和错误监控对复位功能的贡献被阻止/断开,因此状态机和安全状态控制功能不受影响。因此,窗口溢出或功能看门狗故障计数器将触发“Move to INIT”事件,但不会发出微控制器复位信号。
微控制器编程支持功能还提供了根据状态机将 TLF35584 移至任何其他状态的可能性。例如。如果 MPS 引脚在 NORMAL 模式下为高电平并且有看门狗错误计数器溢出,则器件将进入 INIT 状态而不发出复位。
12 Safe State Control Function 安全状态控制功能
12.1 Introduction
安全状态控制监视安全相关信号并控制安全状态信号SS1和SS2。
以下描述总结了安全状态控制功能的贡献者以及调整它们的可能性。
工作原理:
安全状态控制功能监视以下输入:
• 错误监视的结果。引脚 ERR 处的“错误”信号预计是一个切换信号。永久的低或高信号将被检测为错误。
• 微处理器相关调节器的过压和欠压(详细信息请参阅监控功能一章) • 窗口看门狗故障计数器阈值比较器的结果。是否超过“无效窗口看门狗触发”的阈值ΣWWO。
• 功能看门狗故障计数器阈值比较器的结果:是否超过“无效功能看门狗触发”的阈值ΣFWO。
• 相关事件的热关断信号(TSD),使器件进入故障安全状态。
• 内部时钟
• SPI 状态转换请求。如果满足其他边界条件,有效的 GoToNORMAL 命令会触发信号 SS1/2 切换为高电平。通过 SPI 命令将器件移出正常状态会将信号 SS1 和 2(可选地延迟 tSS2)切换为低电平。
安全状态控制功能的以下参数可通过 SPI 进行编程,此设置可以在 INIT、NORMAL、SLEEP 和 WAKE 状态、WWD 和 FWD 配置以及错误引脚配置期间完成,包括通过受保护寄存器禁用各个功能(用于状态描述)请参阅状态机一章):
• 导致激活 SS1 和 SS2 的无效看门狗触发器数量:实施了两个看门狗触发失败计数器,一个用于窗口看门狗,另一个用于功能看门狗。每个计数器在每次无效看门狗触发时递增 2,在每次有效看门狗触发时递减 1。 (有效和无效触发在功能和窗口看门狗章节中描述)。增量变化由中断指示。递减变化不由中断指示。可以通过 SPI 命令单独对每个计数器的阈值进行编程。该函数可用于测试看门狗功能。
• 立即反应或恢复延迟反应,仅与输入信号ERR 相关:该参数决定安全状态控制是立即对SMU 指示的错误做出反应,还是在错误指示仍然存在的情况下在一定延迟后做出反应。在恢复延迟反应中,安全状态控制将生成中断并启动编程的恢复延迟时间。如果在此时间内错误消失(意味着错误信号应在恢复延迟时间结束之前再次切换),则安全状态控制将保持安全状态输出 SS1/2 高电平。如果在此时间内错误信号不应消失并保持错误指示(意味着在恢复延迟时间结束之前错误信号不应再次切换),则安全状态控制将在恢复后激活安全状态信号 SS1 和 SS2延迟时间已结束。
立即反应是指信号检测延迟时间后反应。
• 恢复延迟时间ΔtREC,仅与输入信号ERR 相关:错误(违反有效ERR 信号)必须长于该延迟时间才能激活安全状态信号SS1 和SS2。仅当选择恢复延迟时间模式时,此延迟时间才有效。
• 安全状态信号1 和安全状态信号2 之间的延迟时间ΔtSS2 安全状态功能提供两个输出信号,它们都作为驱动外部开关的输出级(需要额外的驱动级):
• 安全状态信号1(出现在引脚上) SS1)
• 安全状态信号 2(出现在引脚 SS2 处),可以通过可调延迟时间 ΔtSS2(通过 SPI)延迟到安全状态信号 1。
引脚 ERR 处来自微控制器安全管理单元 (SMU) 的错误信号:
错误监控功能需要在 ERR 引脚处有一个具有确定时序的切换信号,以便微控制器通过其 SMU 无故障运行。该切换信号被视为“活着”指示。错误应通过恒定的低信号来指示。持续的高信号也将被视为故障指示,可能是由短路引起的。结果被提供给安全状态控制。
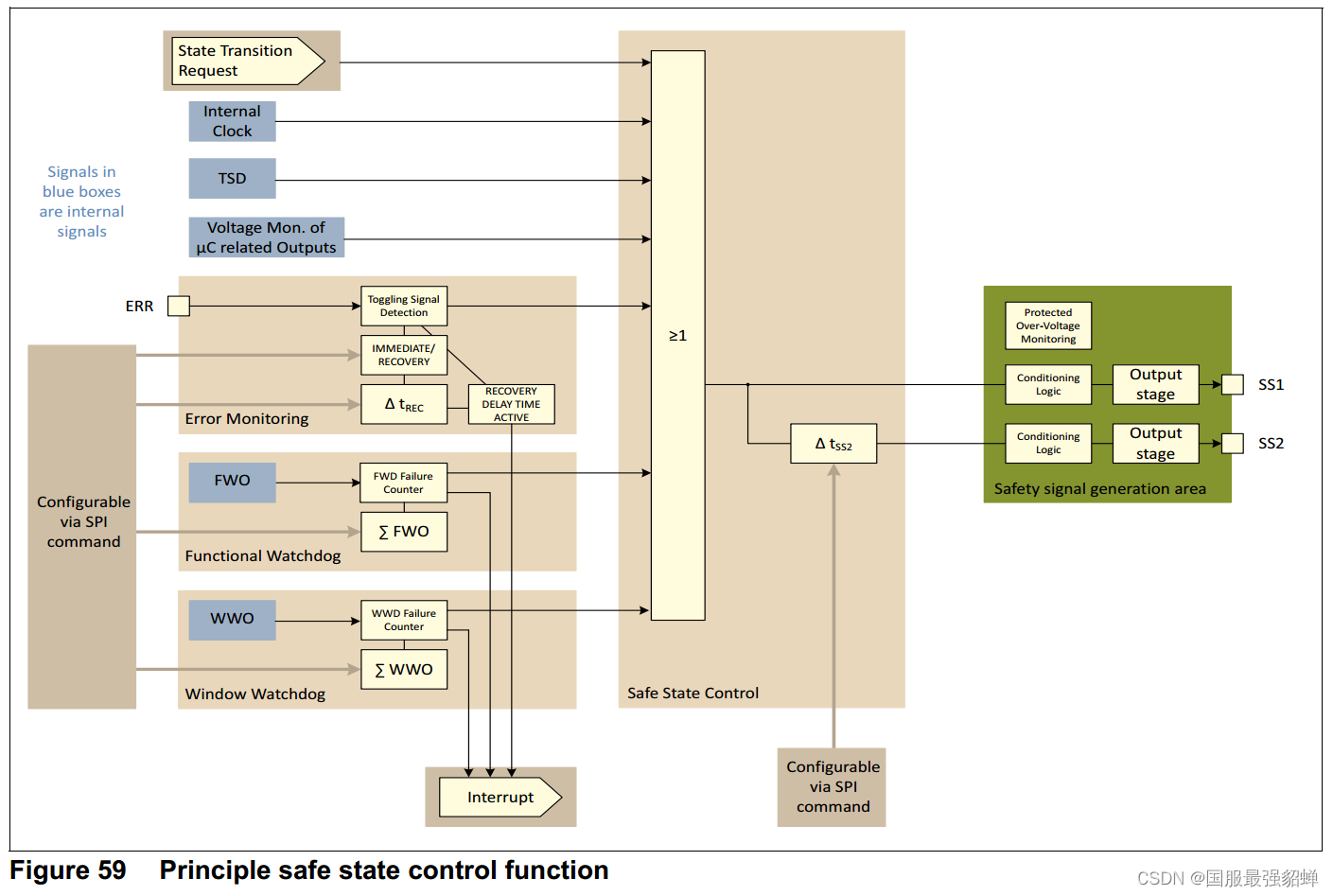
说明:
• 状态转换请求= 微处理器可以通过SPI 请求停用二级安全关闭路径(SS1/2 高)。处于“正常”状态时,微处理器可以通过 SPI 将设备移出“正常”状态,从而激活辅助安全关断路径(SS1/2 低)。
• ERR = 连接到微处理器安全管理单元 (SMU) 的错误引脚
• TSD = 热关断
• ROT = 复位输出
• ΣWWO = “无效 WWD 触发”次数,安全状态控制后应激活安全状态信号 SS1 和 SS2 ,位于窗口看门狗块中
• ΣFWO = “无效 FWD 触发”次数,安全状态控制应激活安全状态信号 SS1 和 SS2,锁定在功能看门狗模块中
• IMMEDIATE/RECOVERY = 区分对 SMU 信号的立即反应或恢复延迟时间,位于错误中监控模块
• ΔtREC = 引脚 ERR 处 SMU 信号的恢复延迟时间,位于错误监控模块中
• ΔtSS2 = 安全状态信号 1 和安全状态信号 2 之间的延迟时间
• SS1 = 安全状态信号 1
• SS2 = 安全状态信号 2
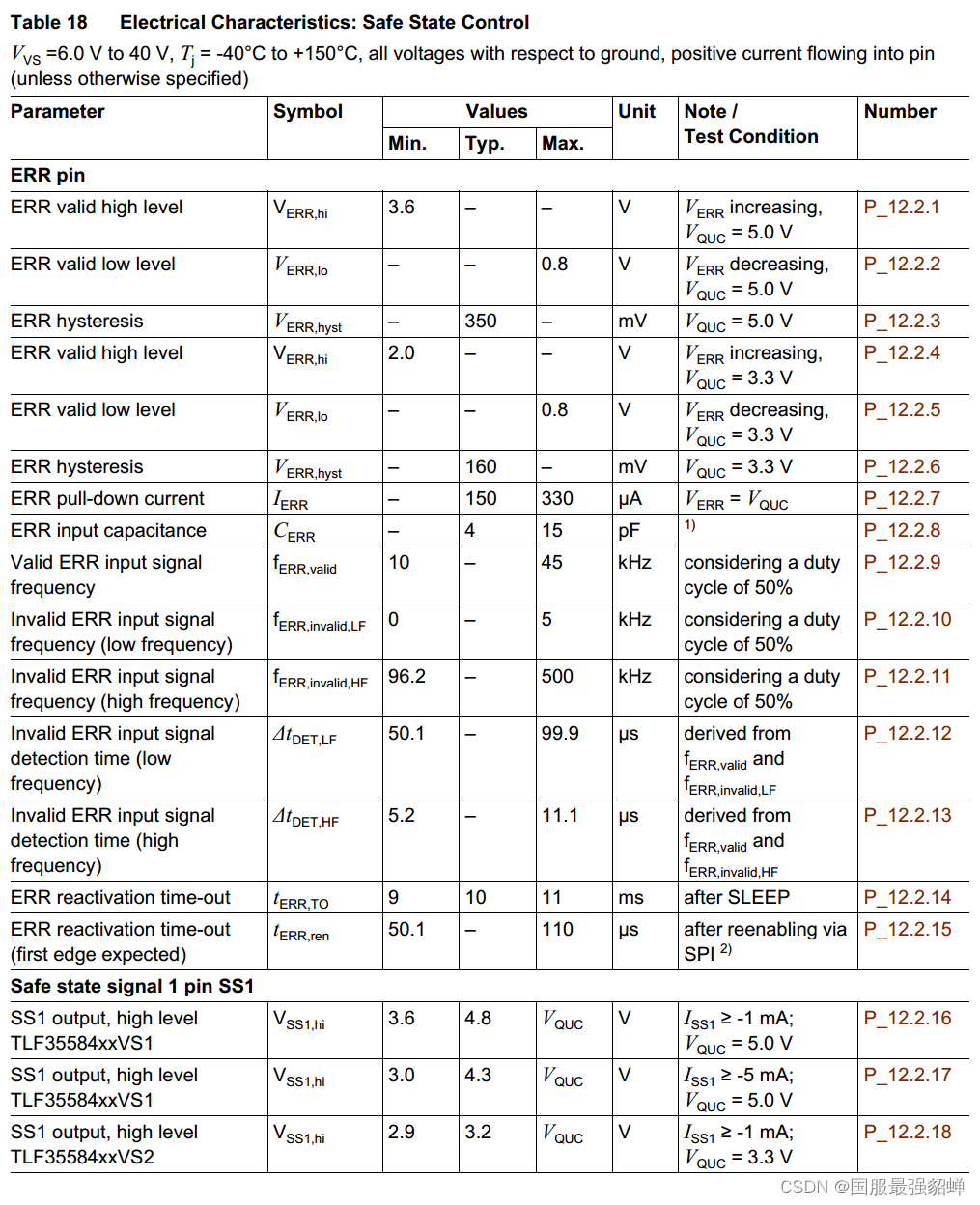
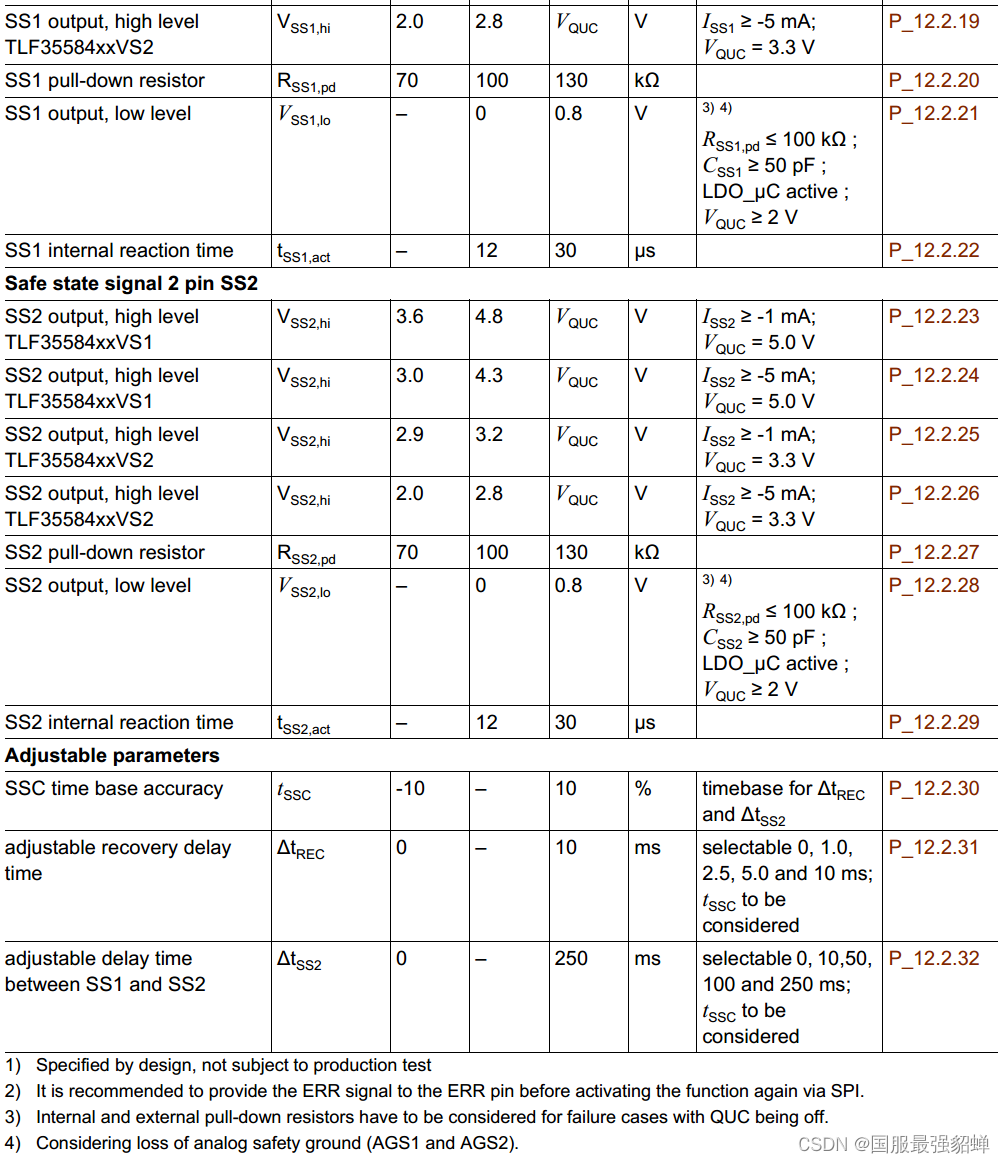
12.2 Electrical Characteristics
ERR pin
Safe state signal 1 pin SS1
Safe state signal 2 pin SS2
Adjustable parameters
12.3 Reaction On Microprocessor Safety Management Unit (SMU - Pin ERR): 微处理器安全管理单元(SMU - 引脚 ERR)的反应:
12.3.1 Immediate reaction on ERR monitoring failure 对 ERR 监控失败立即做出反应
微处理器安全管理单元 (SMU) 通过停止引脚 ERR 处的切换信号来指示严重错误,并设置对错误信号的立即反应:
SMU 信号反应流程图(ERR 信号保持低电平)
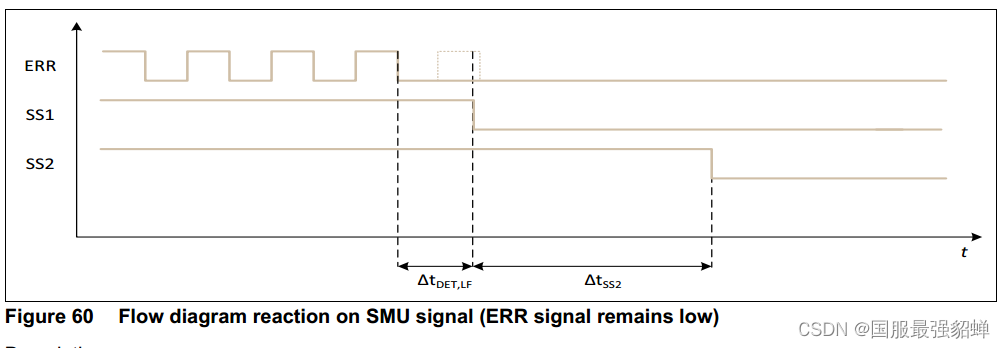
说明:
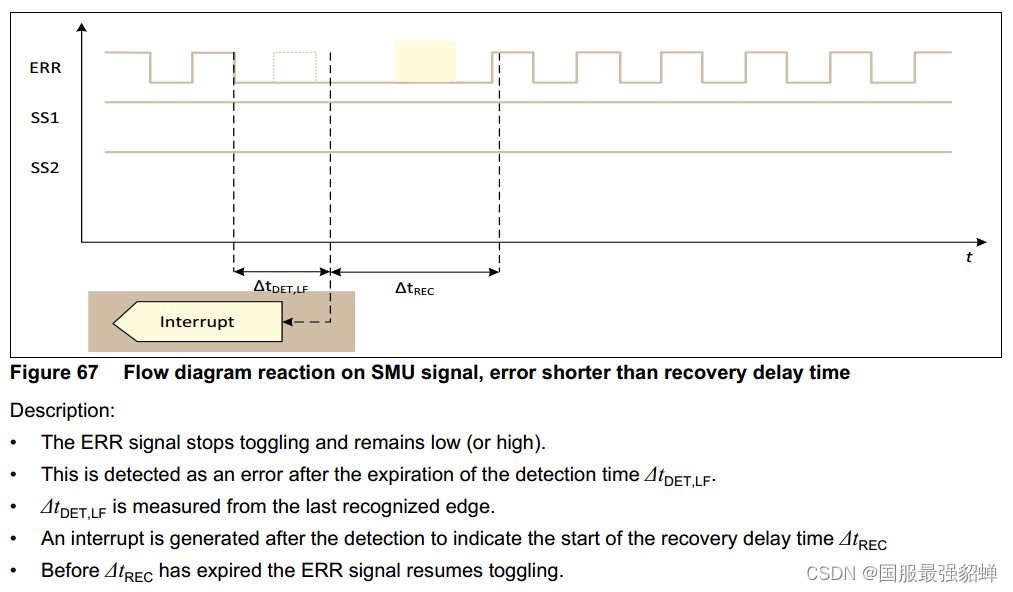
• ERR 信号停止切换并保持低电平。
• 在检测时间ΔtDET,LF 到期后,这被检测为错误。
• ΔtDET,LF 是从最后识别的下降沿开始测量的。
• 安全状态信号 1(在引脚 SS1 处)被拉至低电平
• 安全状态信号 2(在引脚 SS2 处)在可选延迟时间 ΔtSS2 后被拉至低电平
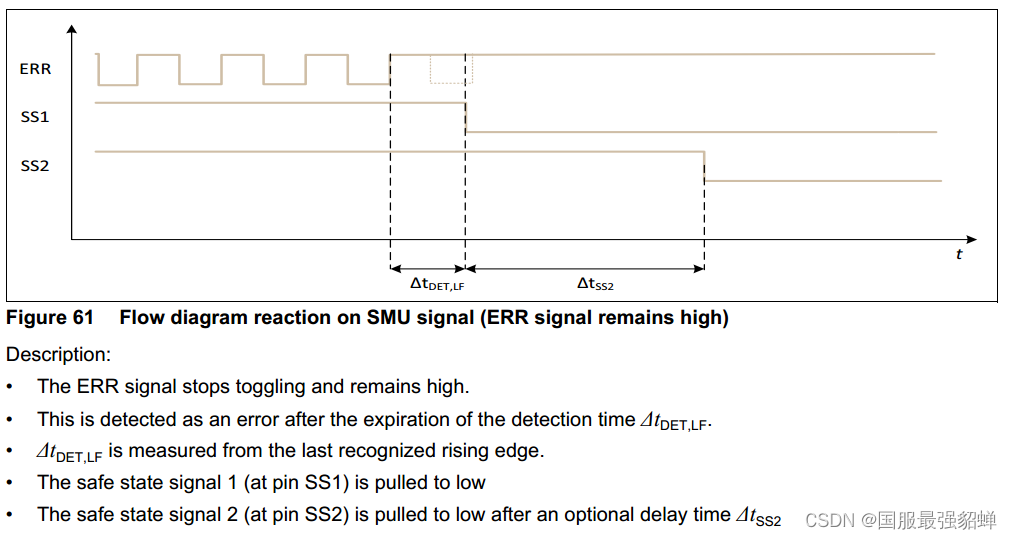
SMU 信号反应流程图(ERR 信号保持高电平)
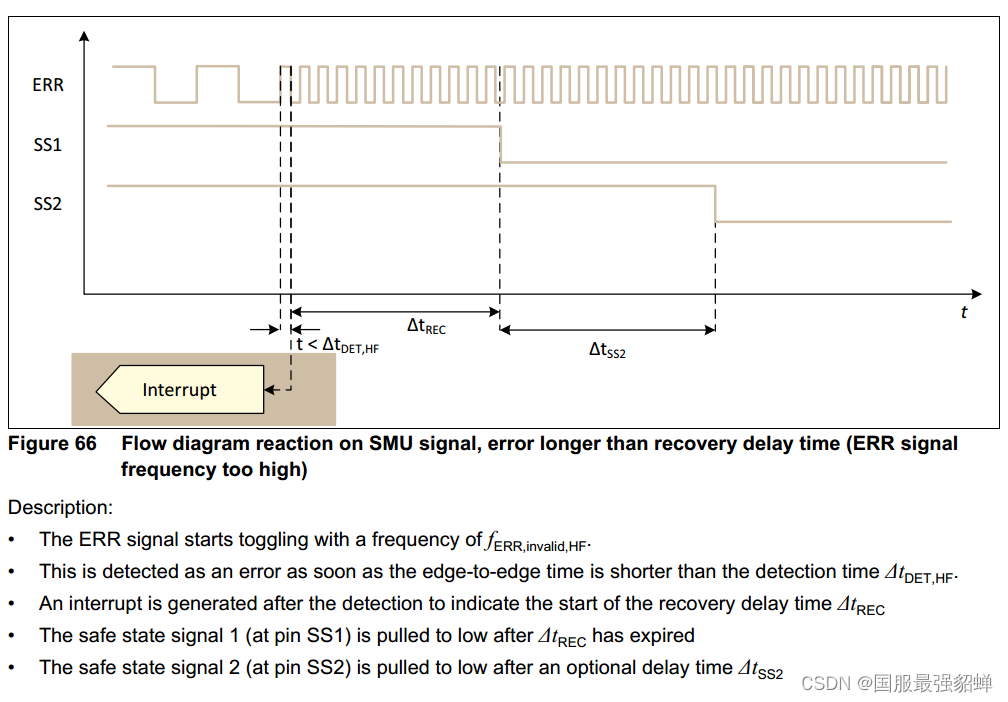
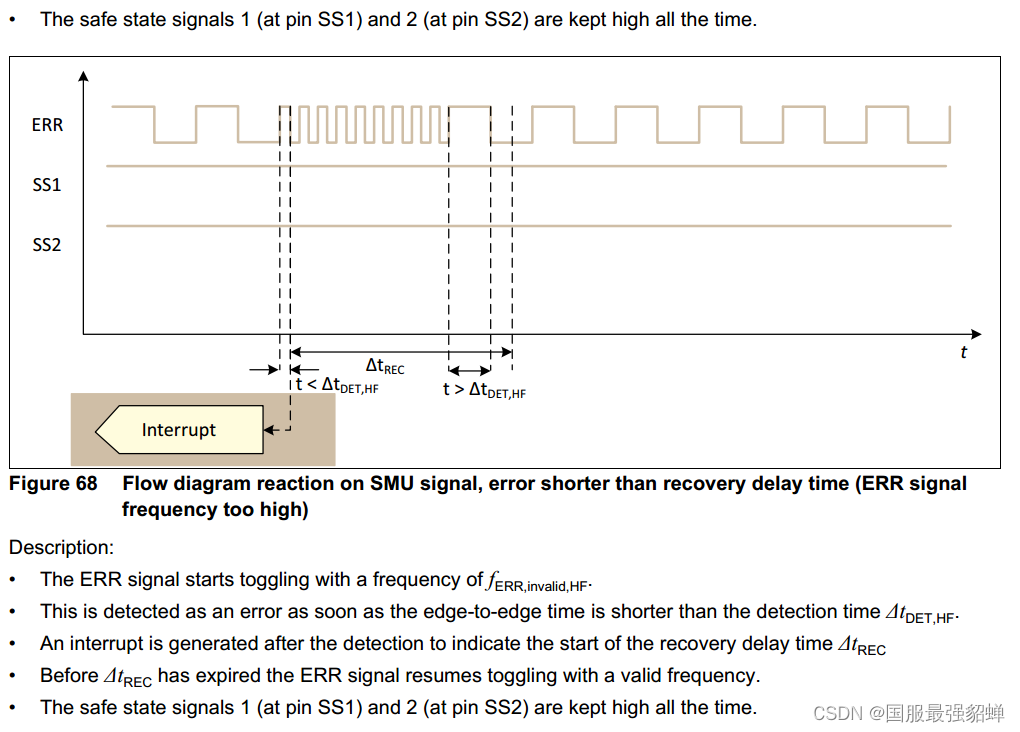
SMU 信号反应流程图(ERR 信号频率过高)
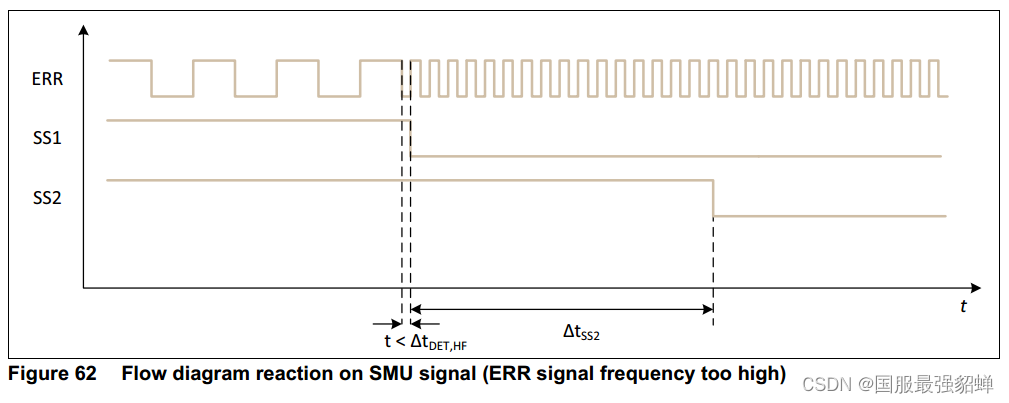
说明:
• ERR 信号开始以fERR、invalid、HF 频率切换。
• 一旦边沿到边沿时间短于检测时间ΔtDET,HF,就会检测为错误。
• 安全状态信号1(在引脚SS1 处)被拉至低电平。
• 在可选的延迟时间ΔtSS2 后,安全状态信号2(在引脚SS2 处)被拉至低电平。
SMU 信号的流程图反应(占空比不同于 50%、tlow 或thigh太长)
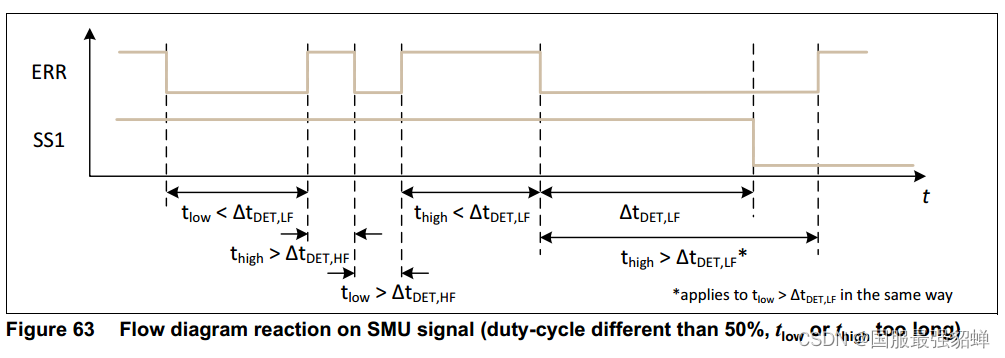
说明:
• ERR 信号随着高低时间的变化而切换(占空比也可能变化),但tlow 和tlow 首先位于tDET,HF 和tDET,LF 之间的有效范围内。
• 那么图中所示的ERR 低脉冲将比检测时间tDET,LF 长。
• 一旦边沿到边沿时间长于检测时间ΔtDET,LF,就会检测为错误。
• 安全状态信号1(在引脚SS1 处)被拉至低电平。
• 安全状态信号2(在引脚SS2)在可选的延迟时间ΔtSS2 后相应地拉至低电平。(图中未示出)
• 该条件可应用于比检测时间tDET,LF 相同的高脉冲 方式。
SMU 信号的流程图反应(占空比不同于 50%、tlow 或thigh太短)
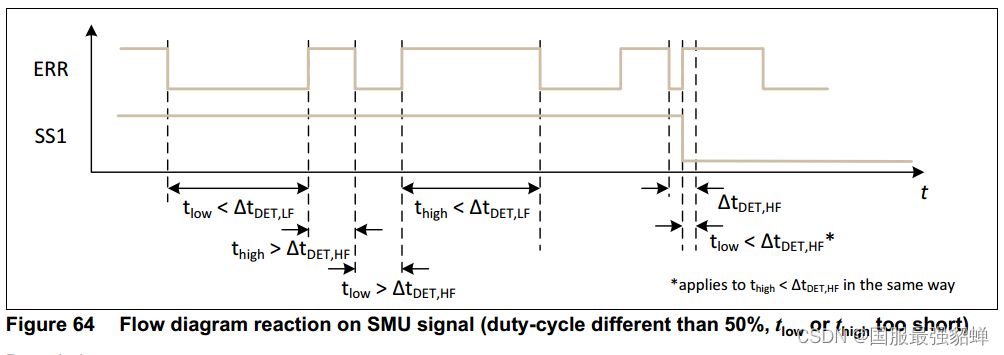
说明: • ERR 信号随着高低时间的变化而切换(占空比也可能变化),但tlow 和tlow 首先位于tDET,HF 和tDET,LF 之间的有效范围内。
• 那么图中所示的ERR 低脉冲将比检测时间tDET,HF 短。
• 一旦边沿到边沿时间短于检测时间ΔtDET,HF,就会检测为错误。
• 安全状态信号1(在引脚SS1 处)被拉至低电平。
• 在可选延迟时间ΔtSS2 后,安全状态信号2(在引脚SS2 处)相应地拉至低电平。(图中未示出)
• 该条件可应用于比检测时间tDET,HF 相同的高脉冲 方式。
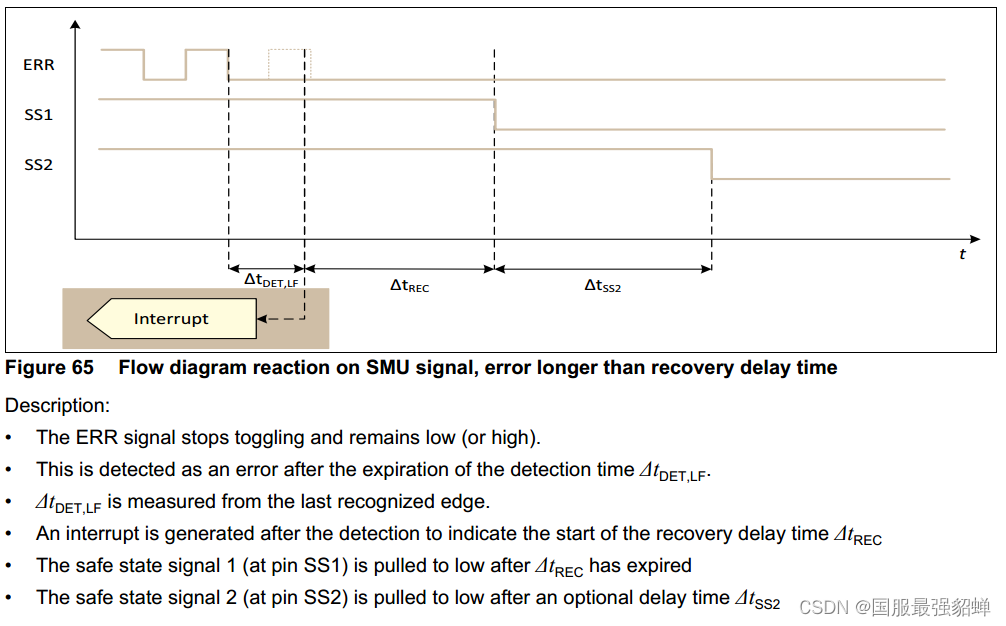
12.3.2 Recovery delay reaction on ERR monitoring failure ERR 监控失败时的恢复延迟反应
微处理器安全管理单元 (SMU) 通过停止引脚 ERR 处的切换信号来指示严重错误,设置对错误信号的恢复延迟时间反应 - SMU 有时间恢复:
12.4 Reaction On Error Triggered State Transitions 对错误触发状态转换的反应
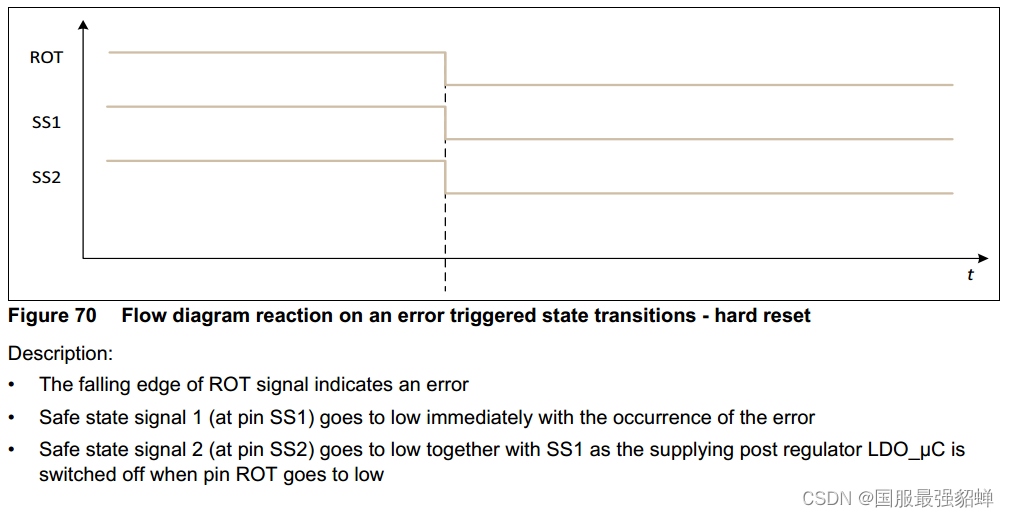
复位输出(ROT)指示微控制器相关调节器的行为(详细信息请参阅电压监控和复位功能一章)。
错误触发状态转换的流程图反应 - 软复位
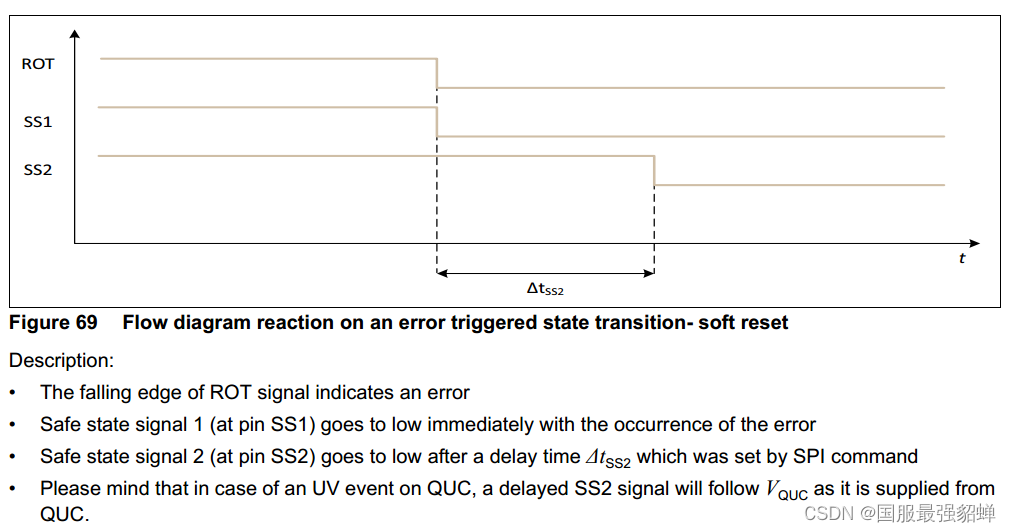
• 请注意,如果 QUC 上发生 UV 事件,延迟的 SS2 信号将跟随 VQUC,因为它是由 QUC 提供的
错误触发状态转换的流程图反应 - 硬重置
12.5 Reaction On Window Watchdog Output (WWO)
TLF35584 具有一个已实现的窗口看门狗故障计数器 (WWDSTAT.WWDECNT)。计数器在每次无效窗口看门狗触发时递增 2,在每次有效窗口看门狗触发时递减 1。 (有关有效和无效触发的说明,请参阅功能和窗口看门狗章节)。
窗口看门狗故障计数器的状态被写入所谓的窗口看门狗状态计数器。窗口看门狗状态计数器的任何增量都由中断指示。窗口看门狗状态计数器的任何递减都不会由中断指示。窗口看门狗状态计数器的内容不能小于零。
用于激活安全状态信号SS1和SS2的阈值ΣWWO可以在INIT、NORMAL和WAKE状态下改变。 (WDCFG0.WWDETHR) 状态计数器的内容将与编程阈值ΣWWO (RWDCFG0.WWDETHR) 进行比较。如果状态计数器的内容等于或高于ΣWWO,则安全状态信号SS1和SS2将被激活(低)。
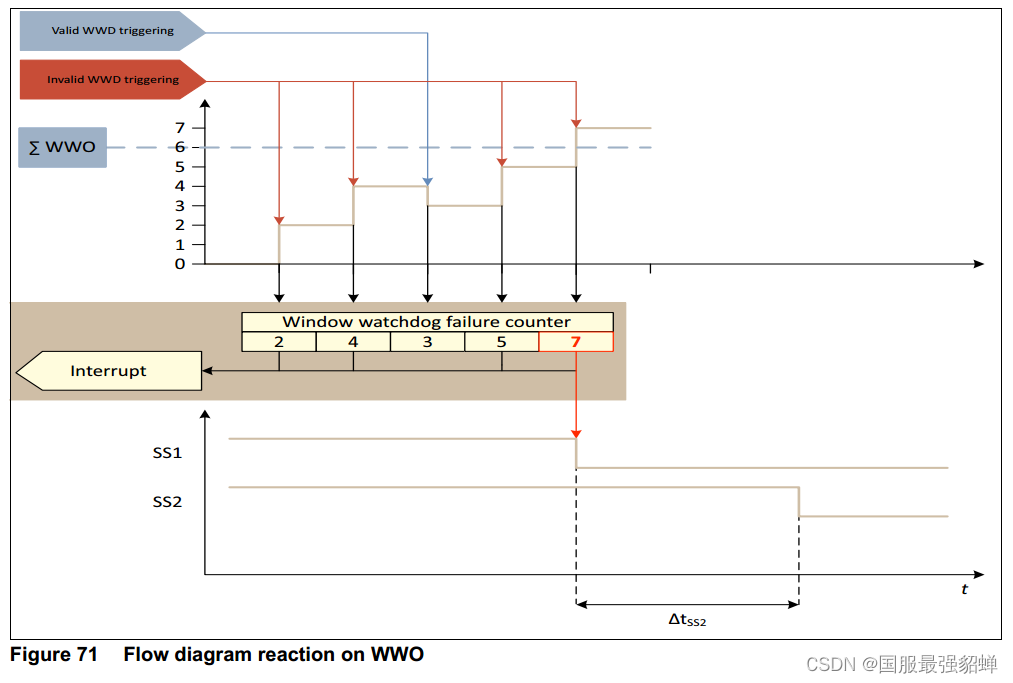
说明:
• 阈值 ΣWWO 设置为 6(示例)
• 无效看门狗触发将窗口看门狗状态计数器加 2,这通过中断来指示
• 有效看门狗触发将窗口看门狗状态计数器减 1,这不是中断由中断指示
• 状态计数器值 7 被识别为错误
• 随着计数器状态变化,安全状态信号 1(引脚 SS1 处)立即变为低电平
• 安全状态信号 2(引脚 SS2 处)在延迟时间 ΔtSS2(由 SPI 命令设置)后变为低电平
12.6 Reaction On Functional Watchdog Output (FWO)
TLF35584 具有已实现的功能看门狗故障计数器 (FWDSTAT1.FWDECNT)。计数器在每次无效功能看门狗触发时递增 2,在每次有效功能看门狗触发时递减 1。 (有关有效和无效触发的说明,请参阅功能和窗口看门狗章节)。
功能看门狗故障计数器的状态被写入所谓的功能看门狗状态计数器中。
功能看门狗状态计数器的任何增量均由中断指示。功能看门狗状态计数器的任何递减都不会由中断指示。功能看门狗状态计数器的内容不能小于零。
用于激活安全状态信号SS1和SS2的阈值ΣFWO可以在INIT、NORMAL和WAKE状态下改变。 (WDCFG1.FWDETHR) 状态计数器的内容将与编程阈值ΣFWO (RWDCFG1.FWDETHR) 进行比较。
如果状态计数器的内容等于或高于ΣFWO,则安全状态信号SS1和SS2将被激活(low)。
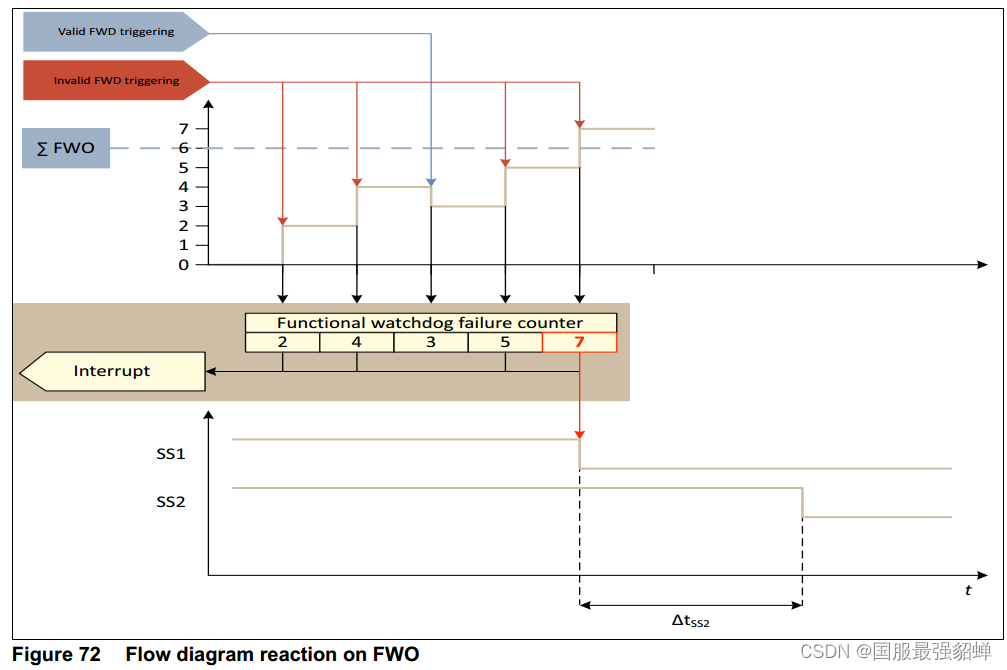
说明:
• 阈值 ΣFWO 设置为 6(示例)
• 无效看门狗触发将功能看门狗状态计数器增加 2,这由中断指示
• 有效的看门狗触发将功能看门狗状态计数器减一,这不会由中断指示
• 状态计数器值 7 被识别为错误
• 安全状态信号 1(在引脚 SS1 处)随计数器状态立即变低变化
• 安全状态信号 2(在引脚 SS2 处)在由 SPI 命令设置的延迟时间 ΔtSS2 后变为低电平
12.7 Reaction On Thermal Shutdown (TSD) 热关断反应 (TSD)
热关断 (TSD) 表示芯片上的温度过载:因此,所有前置和后置稳压器将立即关闭。
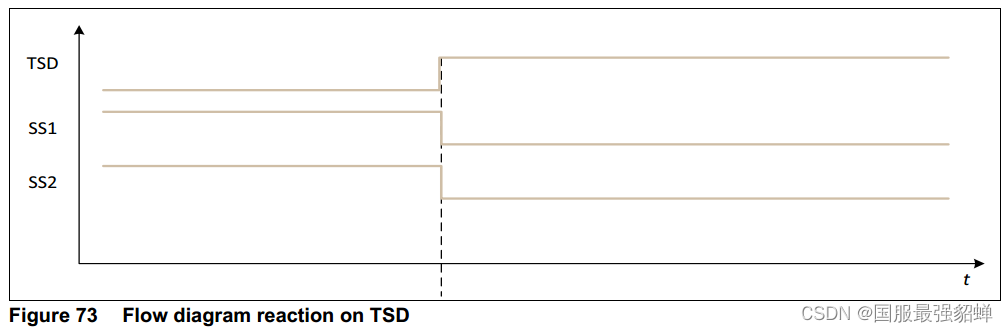
说明:
• TSD 信号(内部)的上升沿被识别为错误
• 安全状态信号 1(引脚 SS1 处)随着 TSD 上升沿立即变为低电平
• 安全状态信号 2(引脚 SS2 处)变为低电平与 SS1 一起,当引脚 ROT 变为低电平时,供电后稳压器 LDO_μC 将关闭
13 SPI - Serial Peripheral Interface SPI - 串行外设接口
13.1 Introduction
主要功能
串行外设接口总线或SPI总线是一种以全双工模式运行的同步串行数据链路。
TLF35584 在从机模式下进行通信,其中主机 (μC) 启动数据帧。 TLF35584 应通过专用片选线进行寻址。这允许其他从设备连接到 SPI 总线。
数据传输
要开始通信,μC 首先使用小于或等于 TLF35584 支持的最大频率的频率来配置时钟。 µC 下拉 TLF35584 的芯片选择。
功能描述
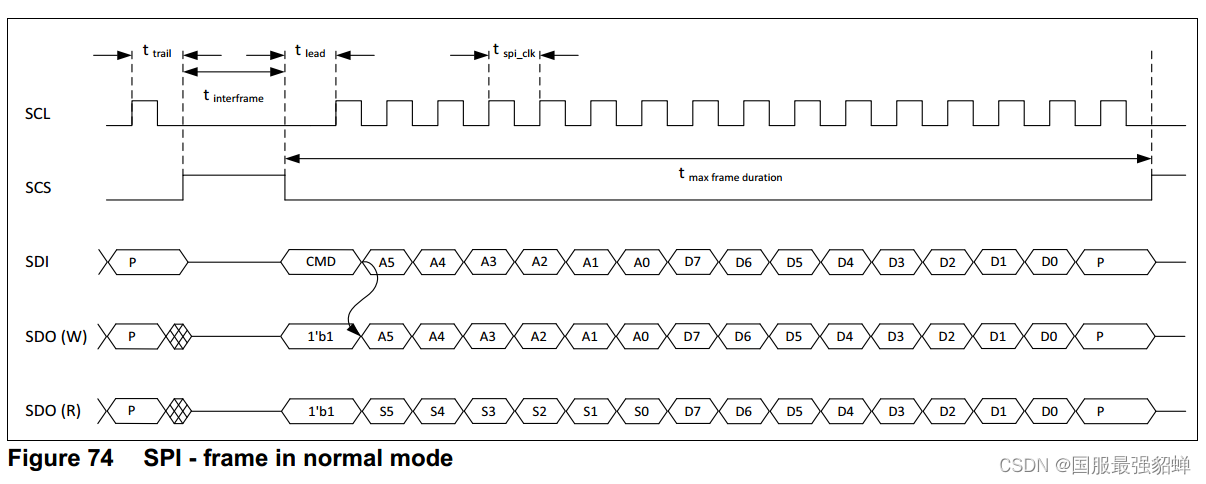
SPI 基本访问:MOSI(引脚 SDI)上的所有数据均在 SPI 时钟信号(引脚 SCL)的上升沿捕获,并在 SPI 时钟信号(引脚 SCL)的下降沿移位。相同的方法需要应用于 MISO (SDO) 的 SPI 主设备。读操作必须以 CMD 位为 1’b0 开始,写操作必须以 CMD 位为 1’b1 开始。
如果执行写操作,则写入 SDI 的命令将循环回 SDO。
在执行读取操作的情况下,计算输出数据流的奇偶校验。计算的数据由1’b1、status[5:0]和rd_data[7:0]组成。如果输出数据流中“1”的个数为奇数,则奇偶校验位设置为“1”,即所有 15 位之间进行异或函数发送出去。
对写入数据进行奇偶校验。奇偶校验是根据输入位流的命令位、六个地址位和八个数据位计算的。
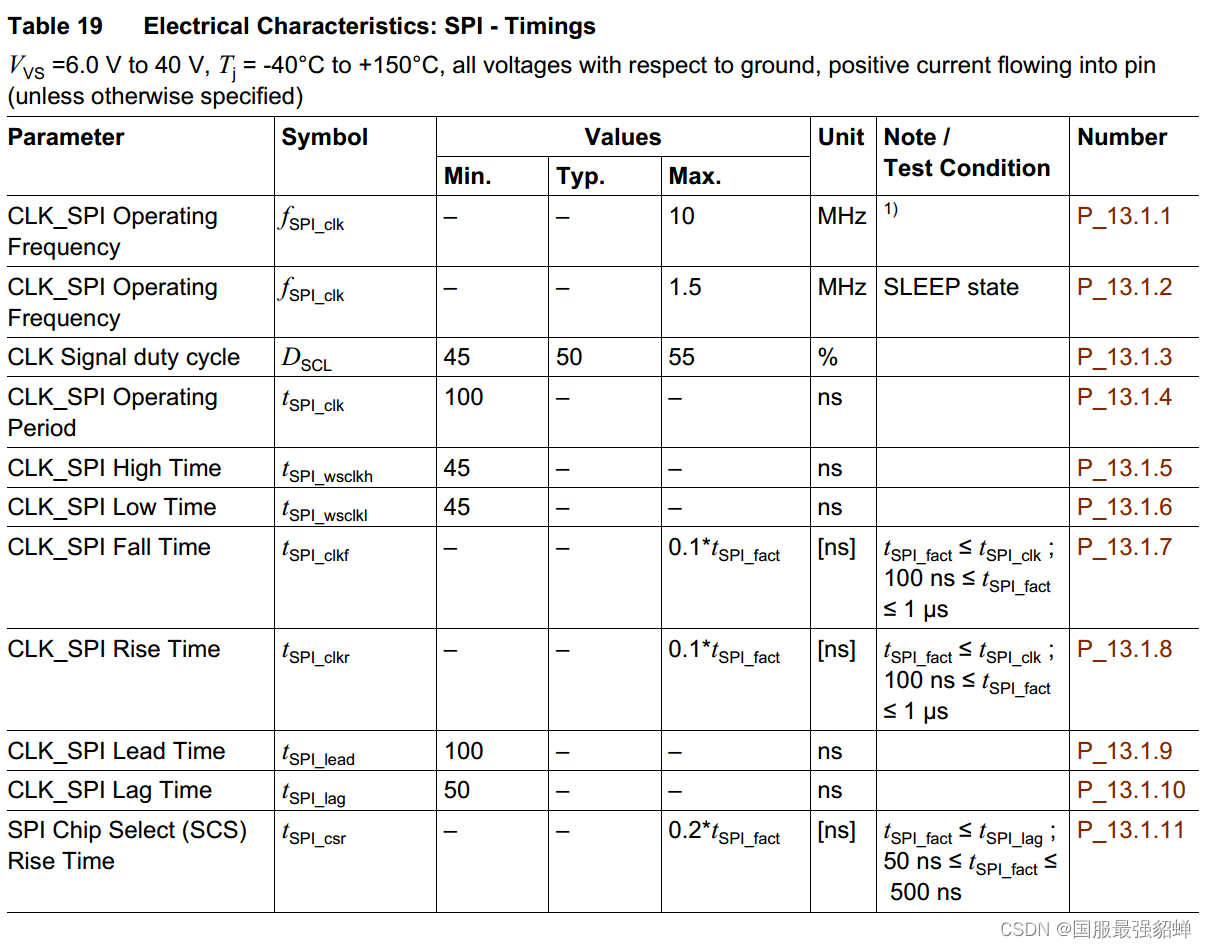
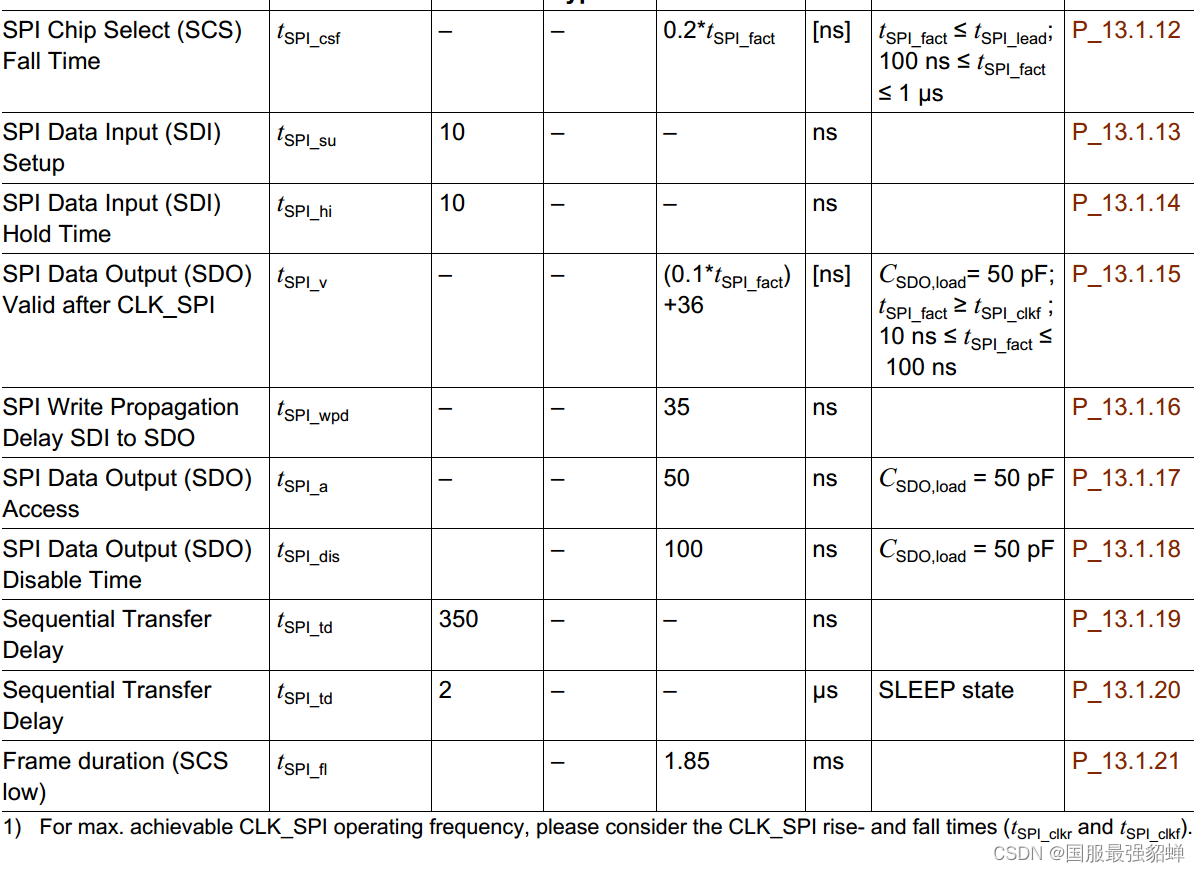
如果状态机 (FSM) 处于 INIT 状态、NORMAL 状态、WAKE 状态或 SLEEP 状态,则可以随时通过 SPI 进行配置。在 SLEEP 状态期间,SPI 的最大时钟频率降低,详情请参阅表 19。
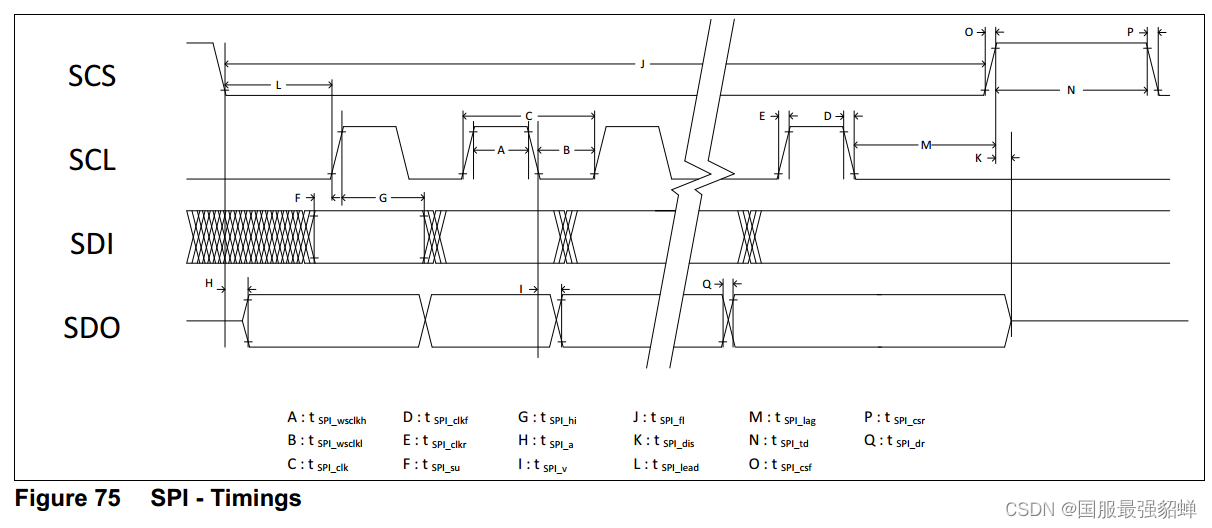
SPI访问时序如下图所示:
SPI MISO:
• 写入期间,来自MOSI 的数据直接环回,读取期间,寻址寄存器内容将在同一SPI 帧中提供。
• cmd 位始终设置为1’b1。所有其他状态位均设置为零。
SPI 错误:
• 写入期间奇偶校验位错误,写入数据被忽略。
• 写入无效地址,写入数据将被忽略。
• 当SCS 为低电平时,SPI 时钟周期数错误,写入数据被忽略,读取数据由器件在每个SPI 时钟周期提供。
• 从无效地址读取(对于读取数据,MISO 上所有数据位均返回零)。对于这种情况,奇偶校验位在设备完成计算后被反转/损坏。
• 无效的帧持续时间、写入数据被忽略并且SDO 的输出驱动器在tSPI_fl 之后由器件在内部关闭。只要 SCS 为低电平的时间少于 tSPI_fl,每个 SPI 时钟周期都会提供读取数据。
• 如果SPI 时钟周期数不同于16,并且器件检测到无效帧持续时间错误,则无效帧持续时间状态标志会被置位,并且错误的SPI 时钟周期数状态标志也会被置位。
如果发生 SPI 错误,将产生中断。
仅当 SCS 被驱动为高电平或发生帧超时后,才会启动 SPI 错误中断。
13.2 SPI Write Access To Protected Registers 对受保护寄存器的 SPI 写访问
某些内部寄存器(SYSPCFG0、SYSPCFG1、WDCFG0、WDCFG1、FWDCFG、WWDCFG0、WWCDFG1)需要防止被意外覆盖。可以通过读取寄存器 PROTSTAT 中的 LOCK 位来检查保护状态。
仅在通过 SPI 发送专用 32 位 UNLOCK 序列后才能对这些寄存器进行写访问。需要发送四个字节,中间没有任何其他 SPI 写访问。这样做的错误将重置序列检测,即必须发送新的 UNLOCK 序列。如果在其间检测到对任何其他寄存器的写访问,然后检测到 PROTCFG,则会生成中断,并且成功检测到的 UNLOCK 序列字节数将设置为零。在 INIT、NORMAL 和 WAKE 状态下可以访问受保护的寄存器。
UNLOCK 序列由 4 个连续字节 (1: 0xAB; 2:0xEF; 3:0x56; 4:0x12) 的 32 位序列组成,必须在其间没有其他 SPI 写访问的情况下发送这些序列。通过读取寄存器PROTSTAT可以检查每个写入字节的正确性。一旦成功执行解锁序列,就可以写入任何受保护的配置请求寄存器。为了确保正确写入受保护的配置请求寄存器,微控制器应读回寄存器值并通过检查数据来验证正确性。写入受保护的配置请求寄存器的数据位在读取操作期间被反转发回,这意味着微控制器可以计算读取的寄存器数据和预期的数据的异或。如果寄存器数据正确,结果应为 0xFF。 TLF35584 不会检查寄存器中值的正确性。
仅在成功执行 LOCK 序列后,所有受保护的配置请求寄存器值才会由相应的功能捕获。成功的 LOCK 序列由 4 个连续字节(1: 0xDF;2:0x34;3:0xBE;4:0xCA)组成的 32 位序列组成,发送时必须在其间没有其他 SPI 写访问。通过读取寄存器PROTSTAT可以检查每个写入字节的正确性。
这样做的错误将重置序列检测,即必须发送新的 LOCK 序列。在这种情况下(LOCK 序列之间的任何 SPI 写访问)都会生成中断。
检测到成功的 LOCK 序列后,配置寄存器和所有内部功能都会使用受保护的配置请求寄存器中的值进行更新。 uC 的责任是通过将新值写入特定寄存器或读回应该未更改的寄存器来确保所有寄存器都正确配置。不支持对受保护寄存器进行部分重新配置,即仅配置单个功能并保持其他功能不变,因为成功的 LOCK 序列会将所有受保护的配置请求寄存器接管到配置中(RSYSPCFG0、RSYSPCFG1、RWDCFG0、RWDCFG1、RFWDCFG、RWDCFG0 ,RWDCFG1)。
锁定序列后,最大内部配置时间。必须考虑 60 µs 以确保新配置被接管。
受影响的功能:
• WWD 和FWD 的所有看门狗配置寄存器。
• 在器件处于休眠状态时启用 WD
• 所有错误引脚监控配置寄存器
• 在 FSM 处于休眠状态时启用错误引脚监控
• 用于启用或禁用 STDBY LDO 的专用寄存器
• 不配置 SS2 延迟时间故障事件导致 FAILSAFE 状态 对任何受保护的配置请求寄存器的读访问始终是可能的。
13.3 SPI Write Initiated State Transition Request And Regulator Configuration SPI 写启动状态转换请求和稳压器配置
状态机转换可以通过 SPI 命令启动。如果任何可选电压源(常规后)的状态预计会更改为下一个状态,则必须将此信息与命令一起发送到同一寄存器中。如果特定电压源(后调节器)的设置应该改变但状态需要保持不变,则可以应用相同的方法。这基本上意味着,SPI 命令包含 FSM 的当前状态,但包含可配置电压源(后调节器)的不同设置。
为了请求 LDO 配置的状态转换和/或更改,请求数据必须依次写入两个独立的寄存器 DEVCTRL 和 DEVCTRLN。与写入 DEVCTRL 的数据相比,写入 DEVCTRLN 的数据必须按位反转。仅当两个寄存器连续写入(第一个 DEVCTRL 和第二个 DEVCTRLN)时,该请求才会被接受,并将在第二个命令结束时由 CS 的上升沿接管。
如果请求无效(顺序错误或 DEVCTRLN 未反转为 DEVCTRL),请求将被拒绝,生成中断并设置相应的状态标志 (NO_OP)。根据第 11 章中的状态机,如果出现无效状态转换请求,则该请求将被忽略,而不发出中断。
13.4 Registers Description 寄存器说明
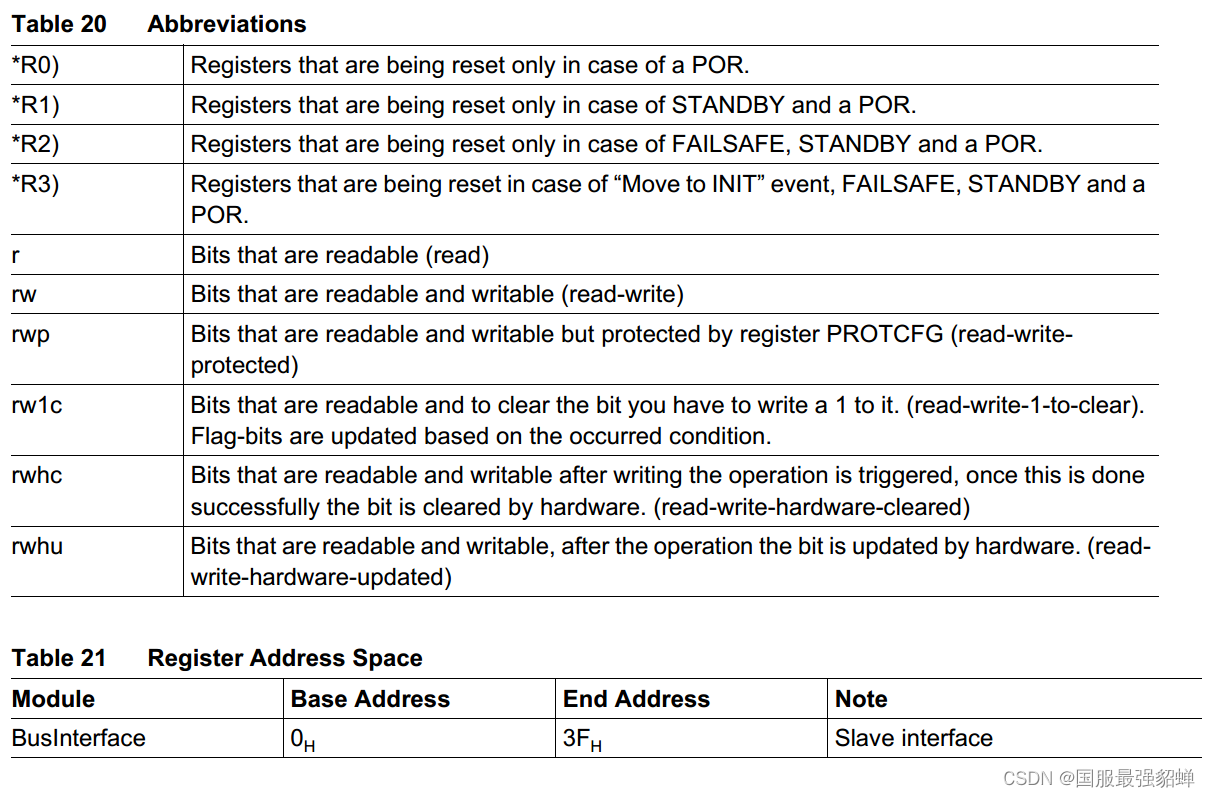
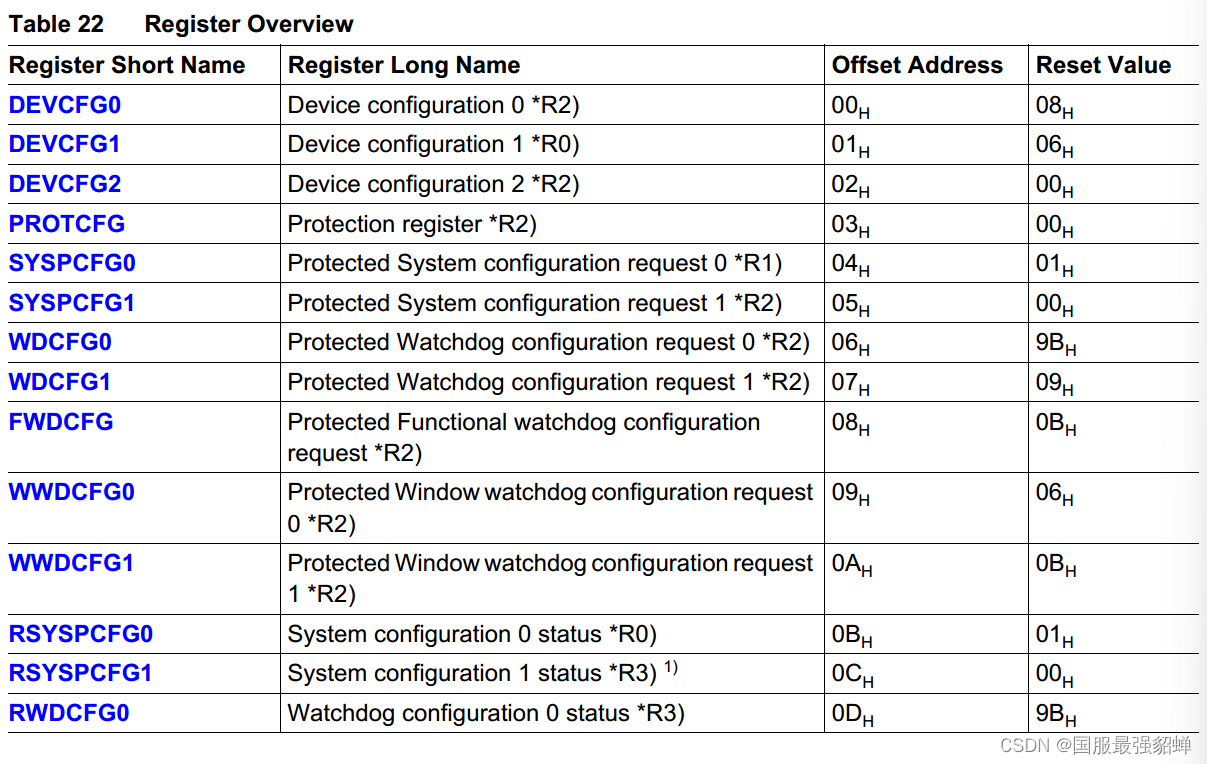
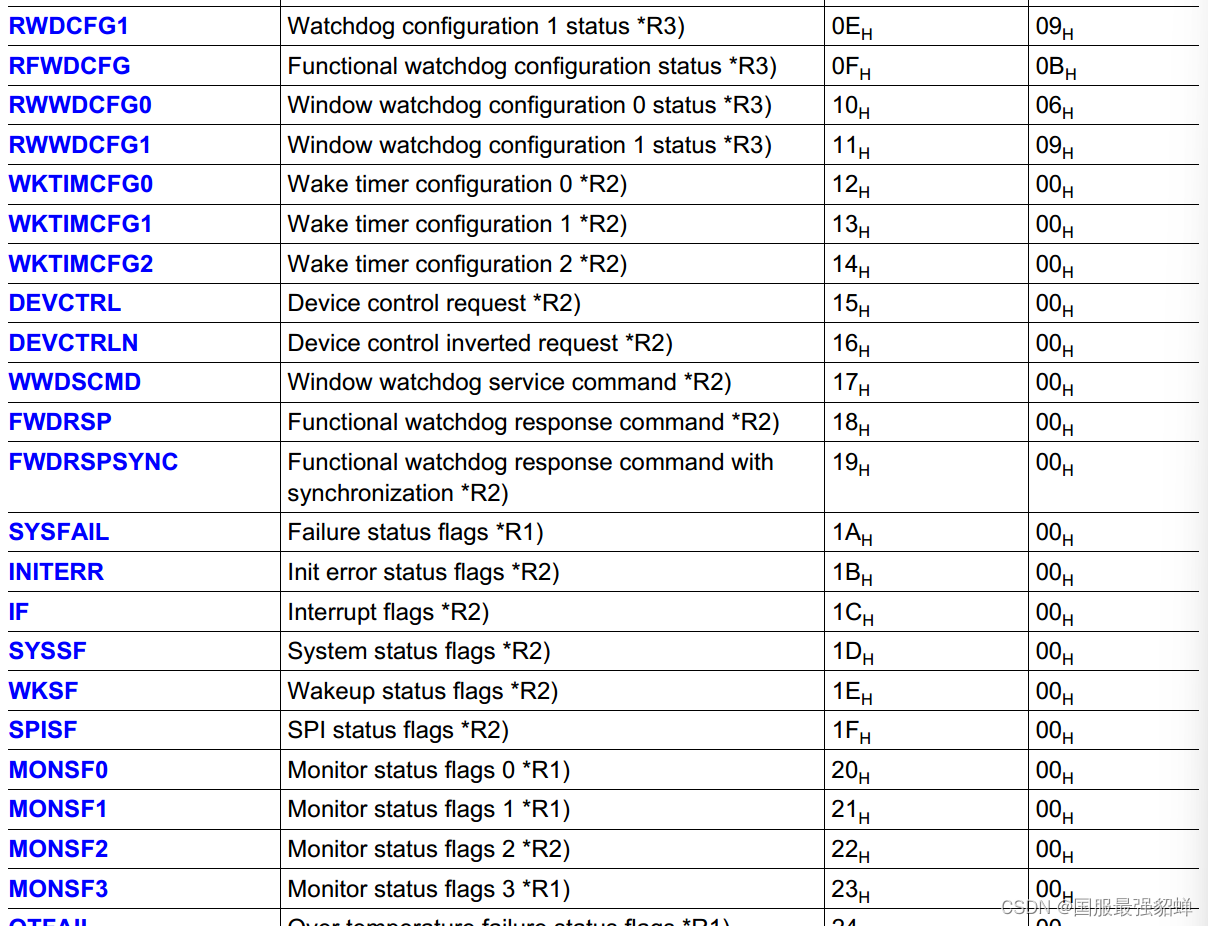
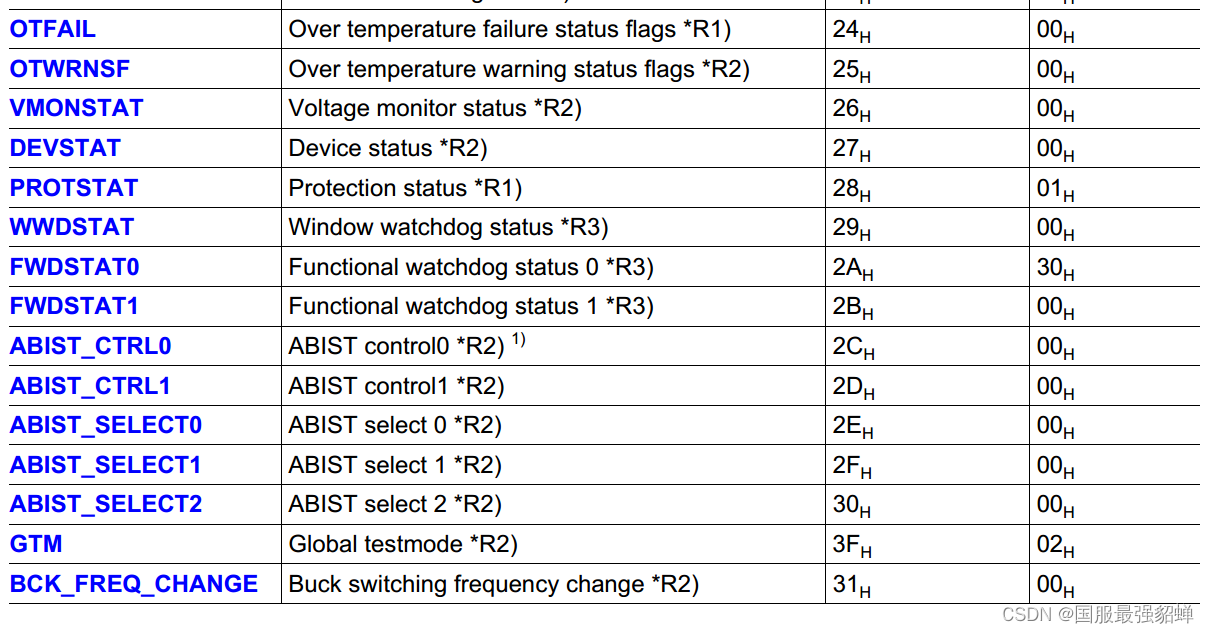

寄存器按字寻址。
###13.4.1 Device registers 设备寄存器
###13.4.2 Buck registers 降压寄存器
13.5 Electrical Characteristics
引脚 SCS,片选
引脚 SCL,时钟
引脚 SDI、数据输入、MOSI
引脚SDO、数据输出、MISO
14 Interrupt Generation 中断产生
实现了专用中断生成块,该块处理来自独立源的请求以生成中断。不同的请求者如下:
• 状态机,用于以下情况:
– 请求的状态转换尚未成功执行,例如:由于 LDO_µC 电流消耗高于所选阈值水平,因此无法进入睡眠状态。
– 请求的从 SLEEP 状态转换已成功执行,即系统已成功进入 WAKE 状态。 uC 只能在系统生成中断事件后发送(附加)SPI 命令。中断事件的目的是通知 uC 状态转换已成功执行,并且系统能够以全 SPI 速度执行 SPI 通信。
• 看门狗,如果看门狗未得到正确服务且配置方式允许发生服务错误,即配置了大于 2 的错误计数器阈值,则会生成中断请求。在这种情况下,仅当由于该错误而未超过错误计数器阈值时才会生成中断。
• 错误引脚监控,如果错误引脚监控块检测到错误并且配置为允许该错误在一定时间内发生(启用恢复延迟操作),则会生成中断请求。在这种情况下,如果错误引脚监控检测到错误并且恢复延迟尚未到期,则会请求中断。
• 监控块,根据第11.4 章中描述的定义的系统反应生成中断请求。
• 通信 LDO 的过热警告和过热关闭
• 参考电压或备用 LDO 的过流情况
• 发生 SPI 错误时的 SPI 模块
• ABIST 操作已完成
• 受保护配置中出现双位错误
生成中断以通知连接 uC 表明发生了非严重系统状况。这允许 uC 根据中断源执行正确的操作。存在一条中断线,默认为高电平。所有内部中断源默认启用且无法禁用。
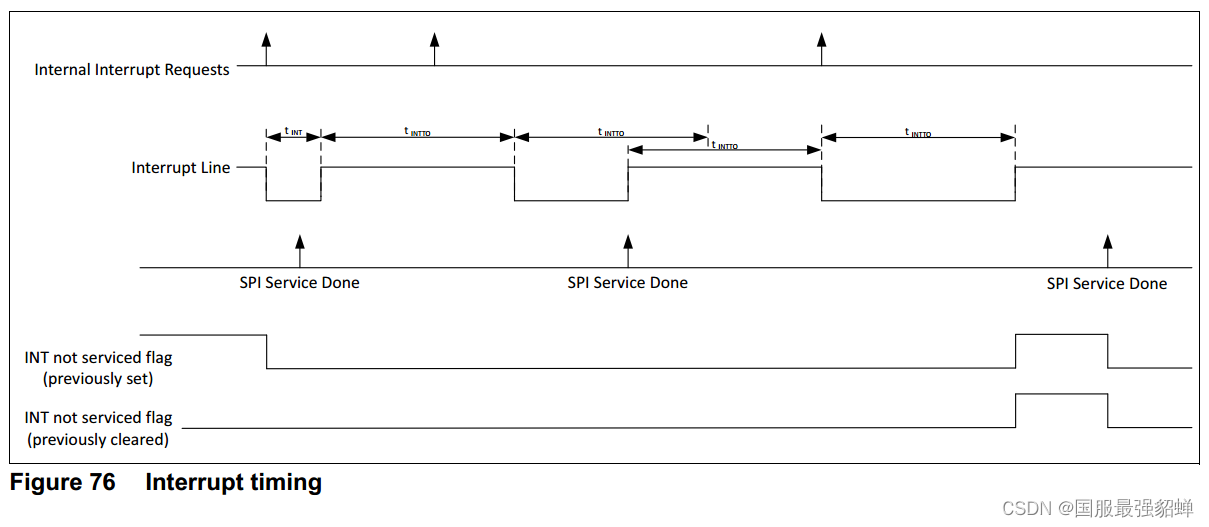
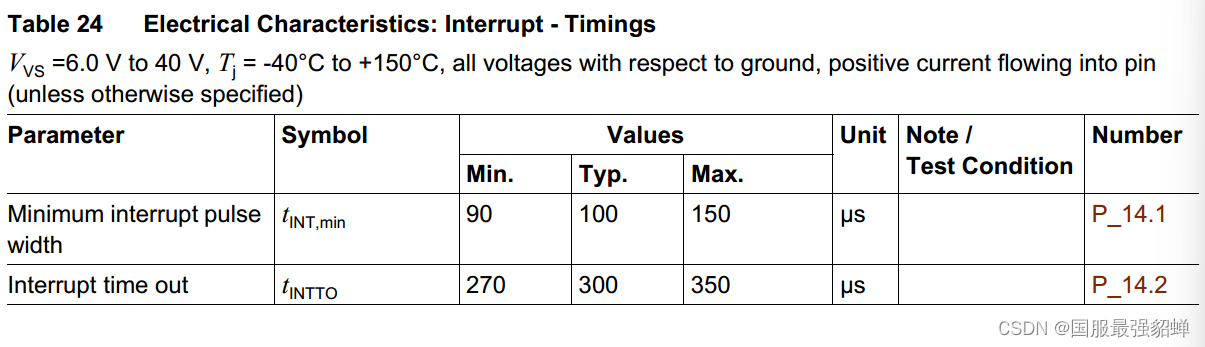
内部中断条件发生后,通过将中断线拉低至少 tINT(中断最小脉冲宽度)来发出中断信号。如果最早在 tINT 到期后但最迟在 tINTTO 到期后通过 SPI 操作清除了所有 IF 寄存器标志,则中断线将被驱动为高电平。
特殊情况:
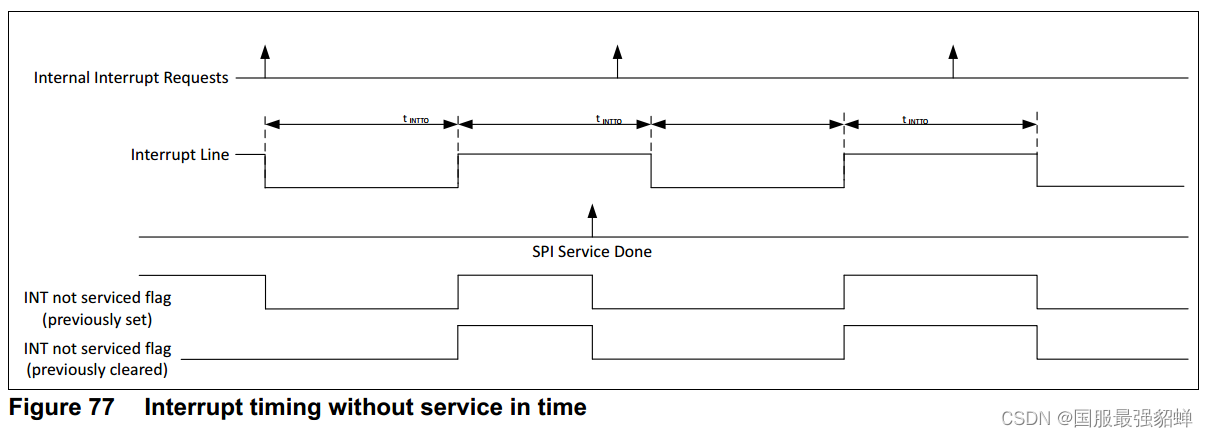
• 如果通过将INT 拉低来发出中断信号,并且uC 在tINTTO 内未清除所有中断状态标志,则INT 将保持低电平直到tINTTO 到期,但不会生成其他中断。有关待处理中断事件的信息可以通过 INTMISS 状态标志获得。每次中断线被驱动为低电平时,该状态标志都会被清除。
• 如果通过将 INT 拉低来发出中断信号,并且在 uC 读取中断位后在 IF 寄存器中断标志中设置一个附加位,并且此过时的信息用于清除中断标志,则中断线将保持低电平直到 tINTTO 到期,但不会生成额外的中断。有关待处理中断事件的信息可以通过状态标志获得。
• 将中断线释放至高电平后,中断线将保持高电平至少tINTTO,无论是否发生任何其他内部中断条件。如果在延迟超时 (tINTTO) 期间发生新的中断事件,将通过在延迟超时 tINTTO 后生成新脉冲来发出信号。
所有中断源只能通过“写 1 清除”(w1c) SPI 操作来清除,即向中断寄存器中的相应位写入逻辑 1 将清除事件。
中断事件以两级方法组织。第一级(中断标志)提供有关不同组中断事件的信息。第二级(状态标志)提供有关哪个特定事件生成中断的详细信息。要服务中断,只需写入中断标志寄存器 (IF)。状态标志寄存器仅用于提供详细信息。然而,所有状态标志也可以被清除。
推荐的中断服务程序:
uC 检测到中断后,推荐的中断服务程序需要通过 SPI 执行以下任务:
1.读取中断标志寄存器 (IF)
2.读取基于状态标志寄存器第一次读取的信息
3.根据中断标志和状态标志采取适当的操作
4.写回状态标志寄存器以清除特定状态标志
5.写回中断标志寄存器(IF) 与先前读取的值一起清除
6.建议:再次读取中断标志寄存器(IF),以检查是否发生另一个中断事件。如果返回到 2)。
7.如果所有位都清零,则写回中断寄存器(IF)将释放中断线INT(满足中断时序要求)。
仅当 uC 的复位信号释放后才会产生中断。当 uC 的复位线仍然有效时发生的中断事件不会在中断线上发出信号,但会设置该事件的特定状态位。
中断线时序的详细信息如下图所示:
下图描述了未清除所有中断状态标志时系统行为的详细信息:
如果设置了内部状态标志,则始终会生成中断,无论该状态标志的当前状态如何。例如,如果第一次检测到 SPI 通信上的奇偶校验错误,则设置标志 SPISF.PARE 并生成中断。该标志也会设置相应的 SPI 中断标志(IF.SPI)。如果标志 IF.SPI 未被清除,但发生第二个 SPI 奇偶校验错误,则无论如何都会生成新的中断。上两图中所示的时序将被满足以产生新的中断。
15 Window Watchdog And Functional Watchdog
15.1 Introduction
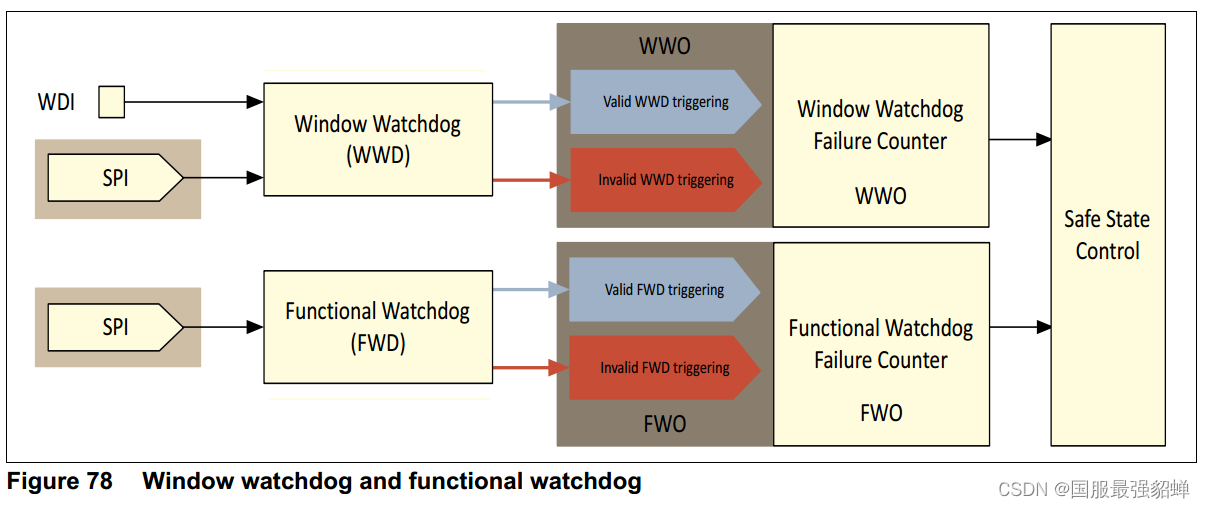
TLF35584 中实现了两种独立类型的看门狗:
• 具有可编程输入触发信号(WDI 引脚或通过 SPI 命令触发至 WWDSCMD 寄存器)的独立窗口看门狗 (WWD)
• 独立功能或问答看门狗 (FWD)。
看门狗具有独立的定时器和错误计数器,允许并行运行两个看门狗。
说明:
• 功能看门狗与窗口看门狗不同步,两者完全独立。
• 功能看门狗和窗口看门狗可以独立激活和禁用。
• 看门狗的结果(有效或无效触发)由相关看门狗故障计数器独立监控。
• 窗口看门狗的状态为WWO,其值可能为“有效WWD 触发”或“无效WWD 触发”。
• 功能看门狗的状态为FWO,其值可能为“有效FWD 触发”或“无效FWD 触发”。
• 两个看门狗的设置对安全状态控制的影响在安全状态控制一章中进行了描述,以便更好地理解
15.2 Window Watchdog
工作原理
TLF35584 中集成了窗口看门狗来监视微控制器。被监控的微控制器必须在“打开窗口”内提供定期触发。触发可以包括 WDI 引脚上的下降沿或通过 SPI 命令写入寄存器 WWDSCMD,具体取决于配置。
该触发将终止“打开窗口”。看门狗输出指示 WWD 故障计数器的“有效”或“无效”WWD 触发。如果“有效”触发,则启动“关闭窗口”。如果在“打开窗口”期间没有触发或在“关闭窗口”期间没有触发,看门狗输出将向控制器指示“无效 WWD 触发”。 WWD 失败计数器和新的“打开窗口”启动。
如果微控制器无法以正确的时序触发窗口看门狗,则假定微控制器未按预期工作。微控制器将收到 TLF35584 的通知,并在发生多个故障事件时复位。
配置
窗口看门狗的以下参数可在INIT、NORMAL 和WAKE 状态下进行配置:
• 触发可设置为引脚触发(引脚WDI)或通过SPI 命令触发(寄存器WWDSCMD)。默认配置是通过 SPI 触发。
• 打开和关闭窗口的长度可以根据应用需要通过SPI 进行修改。(周期时间 WDCYC 和打开 OW 和关闭 CW 窗口的周期数的组合)
• 窗口看门狗故障计数器溢出的阈值可以通过 SPI 初始化来定义。
初始化
一旦复位输出引脚 ROT 从低电平变为高电平,窗口看门狗将在 INIT 状态下激活。激活后,看门狗会打开一个持续时间为 tLOW 的所谓“长开窗口”(LOW)。在“长打开窗口”期间,窗口看门狗期望有效触发,该触发必须通过 SPI 提供,以防保留默认配置,因为看门狗触发引脚 WDI 的任何信号都会被忽略。这是为了避免在启动和初始化期间由于微控制器输出的毛刺而在引脚 WDI 处错误触发。
微控制器可以在“长开窗口”期间更改窗口看门狗的配置,以更改触发选择以及“打开”和“关闭窗口”的时间。通过重新配置,窗口看门狗将使用新配置重新启动。将相应地启动“打开窗口”,等待所选触发输入的有效触发。
如果在“长打开窗口”期间没有发生有效的看门狗触发或配置,则窗口看门狗会识别出“无效 WWD 触发”。如果 INIT 定时器到期且存在无效 WWD 触发,则将发出所谓的“软复位”。在所谓的“软重置”之后,窗口看门狗打开一个新的“长打开窗口”。这不是由中断指示的。 “长开窗”的重复次数是有限的。如果在第二个“长开窗口”内窗口看门狗未正确触发,则会发生正常或“硬”复位,这意味着引脚 ROT 变为零,并且后置稳压器输出电压将关闭。在连续第三次“Long Open Window”没有有效触发后,状态机将使器件进入“FAILSAFE”状态(详细信息请参阅状态机章节)。
正常操作
“长开窗口”内的触发信号将终止“长开窗口”并启动“关闭窗口”。 “关闭窗口”有固定的运行时间,不会发生无效触发。正常操作期间,“关闭窗口”期间不允许有有效触发信号。如果在“关闭窗口”内接收到有效触发信号,则窗口看门狗识别“无效 WWD 触发”。“关闭窗口”将因该无效触发而终止,并启动“打开窗口”。
“无效 WWD 触发”将使窗口看门狗故障计数器增加 2。这是通过中断来指示的。
“关闭窗口”结束后,窗口看门狗启动“打开窗口”。
在“打开窗口”内预计会出现有效的触发信号。如果在“打开窗口”内接收到有效触发信号,则看门狗终止“打开窗口”并启动“关闭窗口”。如果窗口看门狗失败计数器大于零,“有效 WWD 触发”会将其减 1,这不会由中断指示。
如果在“打开窗口”期间没有接收到有效触发,则窗口看门狗识别“无效 WWD 触发”并将窗口看门狗故障计数器增加 2,并启动新的“打开窗口”。这是通过中断来指示的。
在正常操作中,只要接收到有效触发,看门狗就会继续在“打开窗口”和“关闭窗口”之间循环。
窗口看门狗输出 WWO
窗口看门狗输出 WWO 是一个内部信号:它连接到安全窗口看门狗故障计数器。 WWO 的值为“有效 WWD 触发”或“无效 WWD 触发”。
说明:
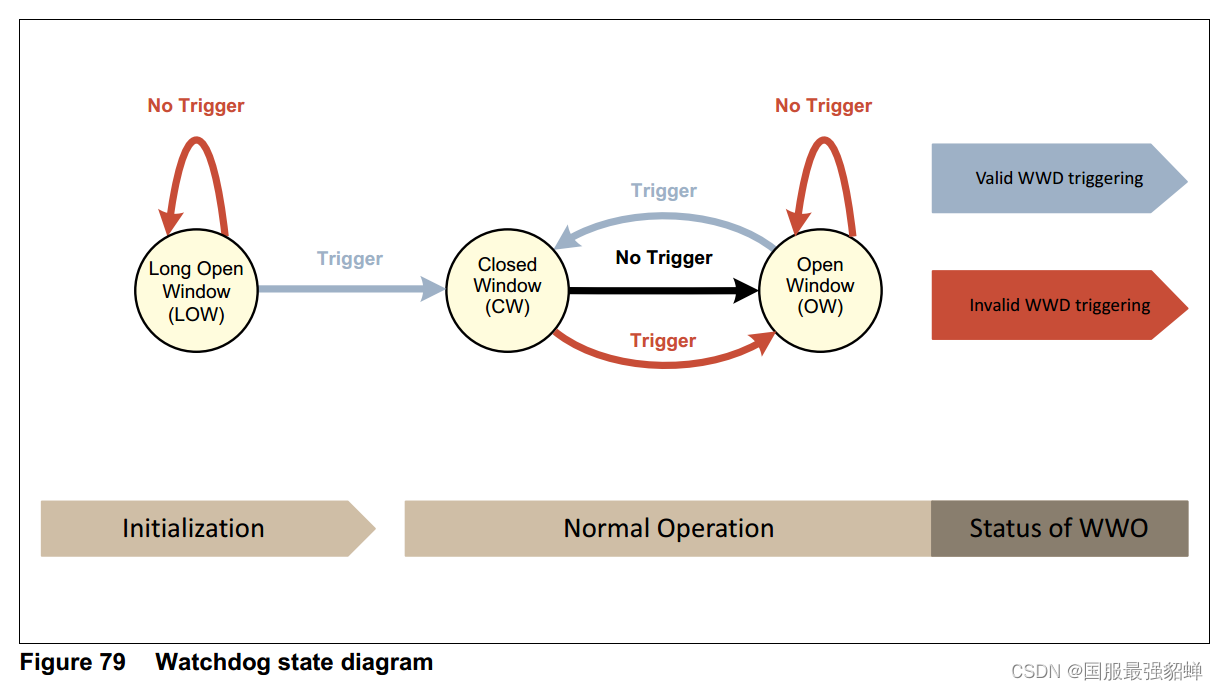
• “触发”可以是发送到 WWDSCMD 寄存器的 SPI 命令,也可以是 WDI 引脚上的有效看门狗触发。
• “长开窗口”中的“无触发”被视为“无效 WWD 触发”,看门狗再次打开“长开窗口”。 “打开窗口”
• “长打开窗口”内的“触发”被视为“有效 WWD 触发”,看门狗关闭“长开窗口”并打开“关闭窗口”
• “关闭窗口”内的“触发”被视为“有效 WWD 触发”。被视为“无效 WWD 触发”
• “关闭窗口”结束后,“关闭窗口”内的“无触发”将看门狗移至“打开窗口”。
• “打开窗口”中的“触发”被视为“有效 WWD 触发”,看门狗关闭“打开窗口”并打开“关闭窗口” 。
• “打开窗口”中的“无触发”被视为“无效” WWD 触发”。
窗口看门狗触发引脚 WDI
看门狗输入引脚 WDI 具有集成下拉电流 IWDI。看门狗输入 WDI 可以在“关闭窗口”内或随后的“打开窗口”期间转换为高电平。
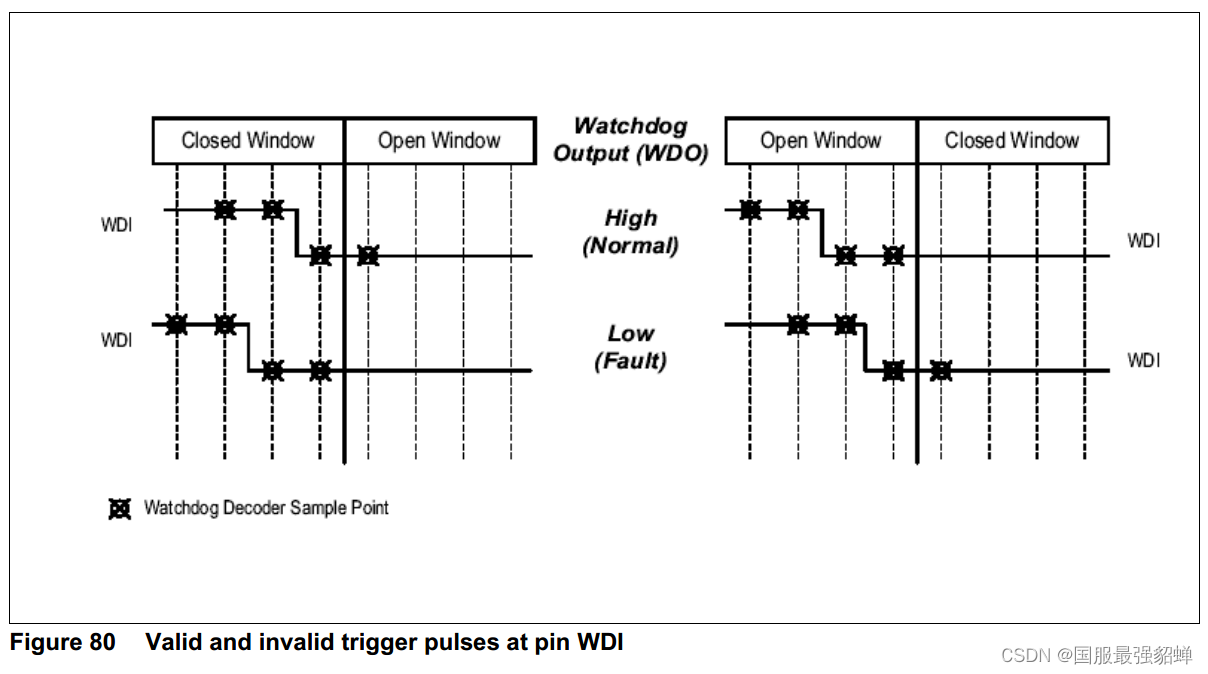
WDI 处的有效触发信号
看门狗输入 WDI 以 TSAM 周期定期采样。有效触发信号是从 VWDI,高电平到 VWDI,低电平的下降沿。为了提高 WDI 输入上的抗噪声或毛刺的能力,有效触发信号至少需要两个高采样点,然后是两个低采样点,通过测量低信号的第二个连续采样点来考虑有效触发。例如,如果引脚 WDI 处的触发脉冲的前三个采样(两个高一个低)位于“关闭窗口”内,并且仅在“打开窗口”中采集第四个采样(第二个低采样),则看门狗输出 WWO 将指示“有效 WWD 触发”。
WDI 无效触发
在“打开窗口”期间未检测到触发信号或在“关闭窗口”期间检测到触发信号,视为无效触发。看门狗输出 WDO 在“打开窗口”期间无有效触发后立即指示“无效触发”,或者在“关闭窗口”期间检测到触发信号后立即指示“无效触发”。
15.2.1 Timing Diagrams 时序图
15.2.1.1 Normal operation: Correct triggering 正常操作:正确触发
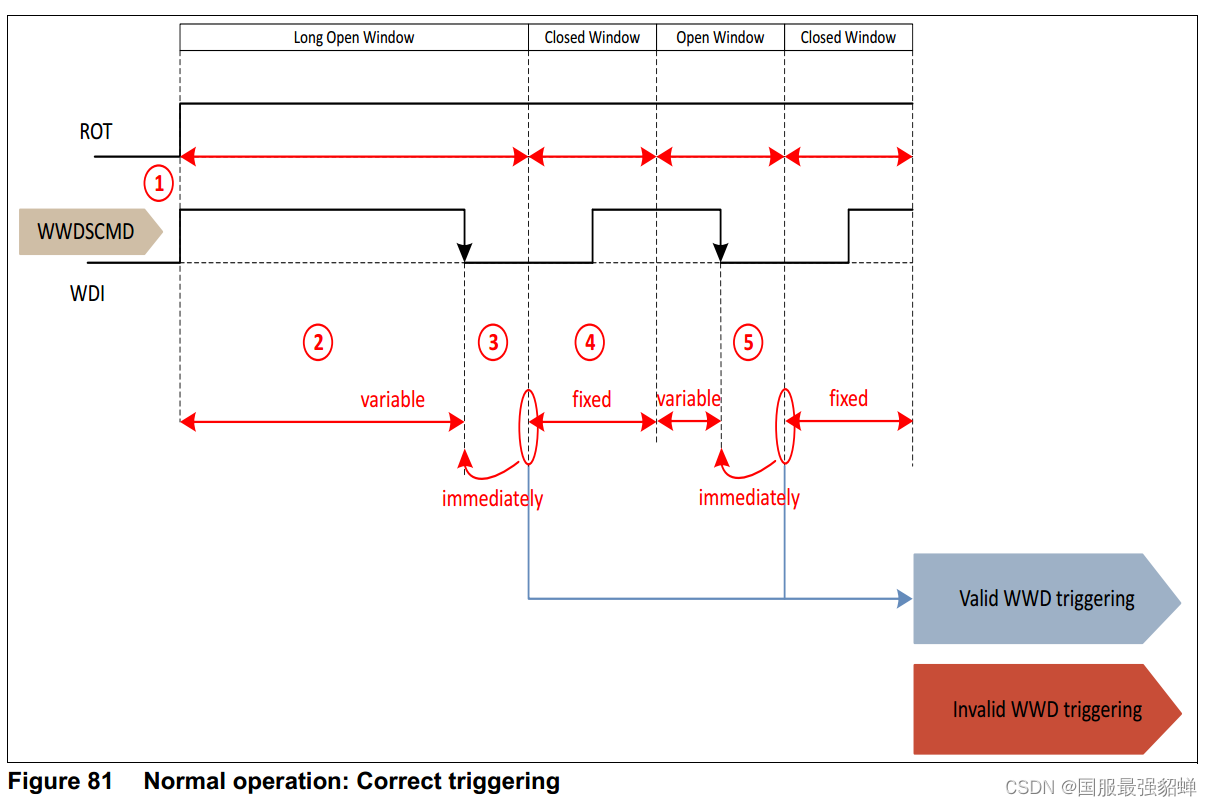
- 如果 ROT(监控微控制器相关电压)的复位输出变高,则“长开窗口”在 INIT 状态下启动。如果窗口看门狗在睡眠状态下被停用,则第一个打开窗口将从睡眠状态转换到唤醒状态(由中断指示)开始。第一个打开窗口的时间取决于配置的周期时间,为 600 ms (WDCYC = 1) 或 60 ms (WDCYC = 0)
- 在“长打开窗口”期间,根据配置的触发选择有效触发 WWD是期待。 “长打开窗口”的最长时间是固定的,但一旦识别到“有效 WWD 触发”,它就会终止。
- 窗口看门狗现在将进入“关闭窗口”。收到第一个有效触发后,设备将被允许从 INIT 状态移至 NORMAL 状态或从 WAKE 状态移至 NORMAL 状态。
- “关闭窗口”具有固定的持续时间tWD,CW(可以通过SPI 命令确定)。它在有效触发信号后立即启动,关闭“打开窗口”或“长打开窗口”。在“关闭窗口”期间不应施加触发信号。 WDI 引脚从低电平到高电平的转变不会被检测到,也不会导致触发事件。
- 有效的触发信号会立即终止“开窗”,因此“开窗”的时间是可变的,具体取决于微控制器安排触发的时间。这被视为“有效 WWD 触发”
15.2.1.2 Fault operation: No trigger in open window after initialization 故障操作:初始化后打开窗口无触发
-
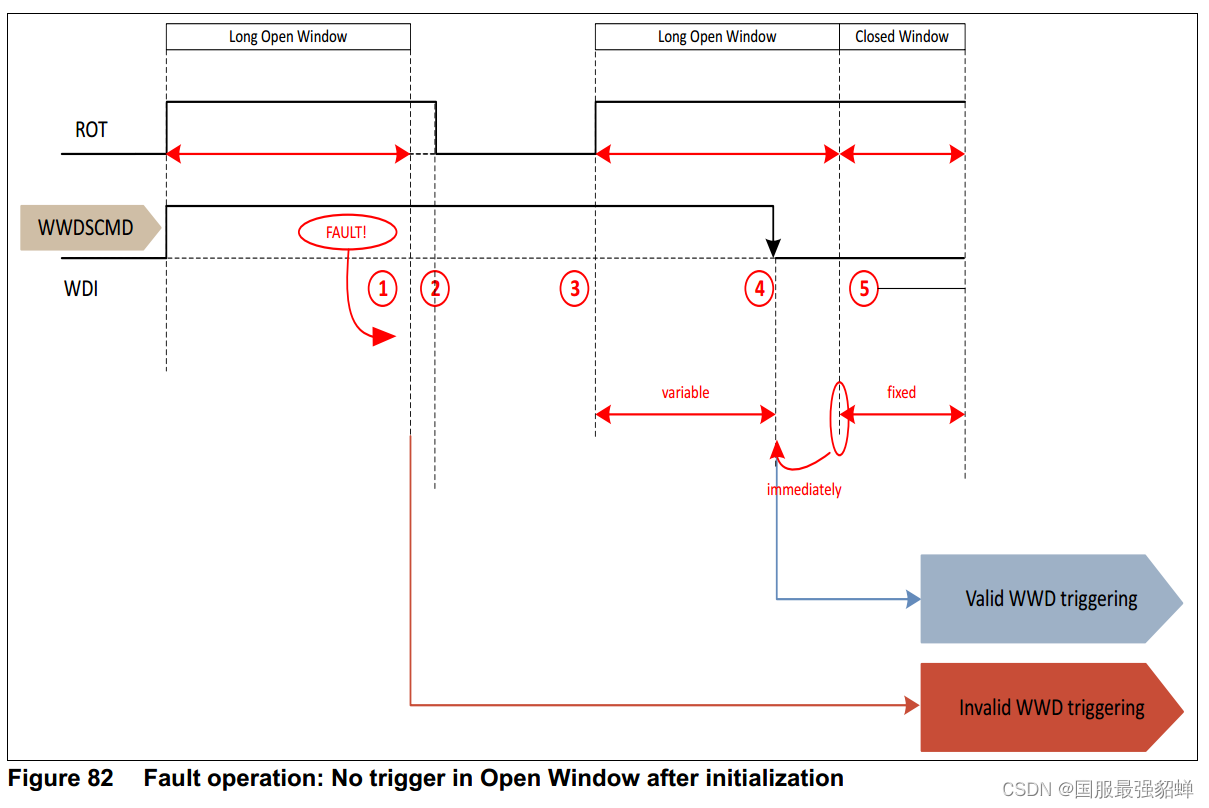
初始化超时和长开窗口(LOW)具有相同的典型值 长度。通常这会导致初始化超时在低电平之前或同时完成,这将跳过中断事件 (1)。尽管由于给定的精度,“长开窗口”内缺少有效触发可能会在低电平结束后导致中断事件,从而使窗口看门狗故障计数器增加 2。
-
INIT状态定时器第一次超时。由于在 INIT 状态期间未按预期接收到窗口看门狗的有效触发,因此将发出所谓的“软复位”:引脚 ROT 变为零,但后置稳压器的输出电压保持开启状态。
附加信息:如果窗口看门狗在接下来的 INIT 阶段的下一个“长开窗口”内未正确触发,将发出“硬复位”,这意味着引脚 ROT 将变为零,并且输出电压将也被关闭。在 INIT 阶段第三次无效触发后,设备将进入 FAILSAFE 状态。 -
经过上电复位延迟时间trd后,所谓的“软复位”引脚ROT再次变高,看门狗打开一个“长开窗口”,让微控制器有机会触发并同步到看门狗周期。
-
有效触发终止“长开窗口”,这使得“长开窗口”的持续时间可变并取决于触发。这被视为“有效 WWD 触发”并启动“关闭窗口”。在不发出中断的情况下,窗口看门狗故障计数器将减 1。
-
接下来的“关闭窗口”持续时间tWD,CW。在此时间内触发将被视为“无效WWD触发”。
15.2.1.3 Fault operation: No trigger in Open Window in steady state 故障操作:稳定状态下开窗无触发
-
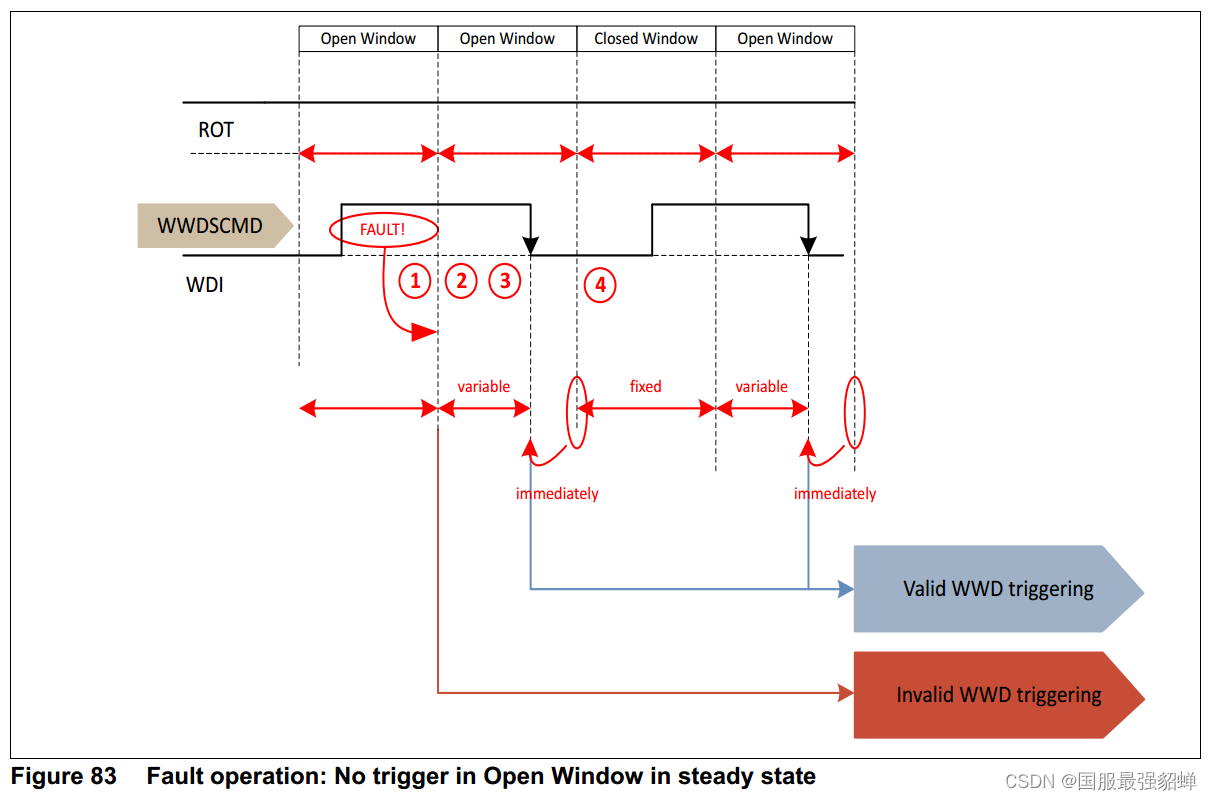
“打开窗口”内缺少有效触发,导致窗口结束后出现“无效 WWD 触发”。该事件由中断指示,窗口看门狗故障计数器增加 2。
-
检测到“无效 WWD 触发”后,看门狗将启动一个持续时间为 tWD,OW 的新“打开窗口”,以使微控制器有机会触发并同步到看门狗周期。
-
有效触发终止“打开窗口”,这使得“打开窗口”的持续时间可变并取决于触发。这被视为“有效 WWD 触发”并启动“关闭窗口”。
在不发出中断的情况下,窗口看门狗故障计数器将减 1。
附加信息:如果“打开窗口”内出现多次“无效 WWD 触发”,窗口看门狗故障计数器将再次增加 2,直到达到配置的阈值。在这种情况下,将发出重置命令。
- 接下来的“关闭窗口”持续时间tWD,CW。在此时间内触发将被视为“无效WWD触发”。
引脚 ROT 的行为取决于 ΣWWO 的值。在上面的例子中,假设无效触发不会导致超过阈值ΣWWO。
15.2.1.4 Fault operation: False trigger in Closed Window after initialization 故障操作:初始化后关闭窗口中错误触发
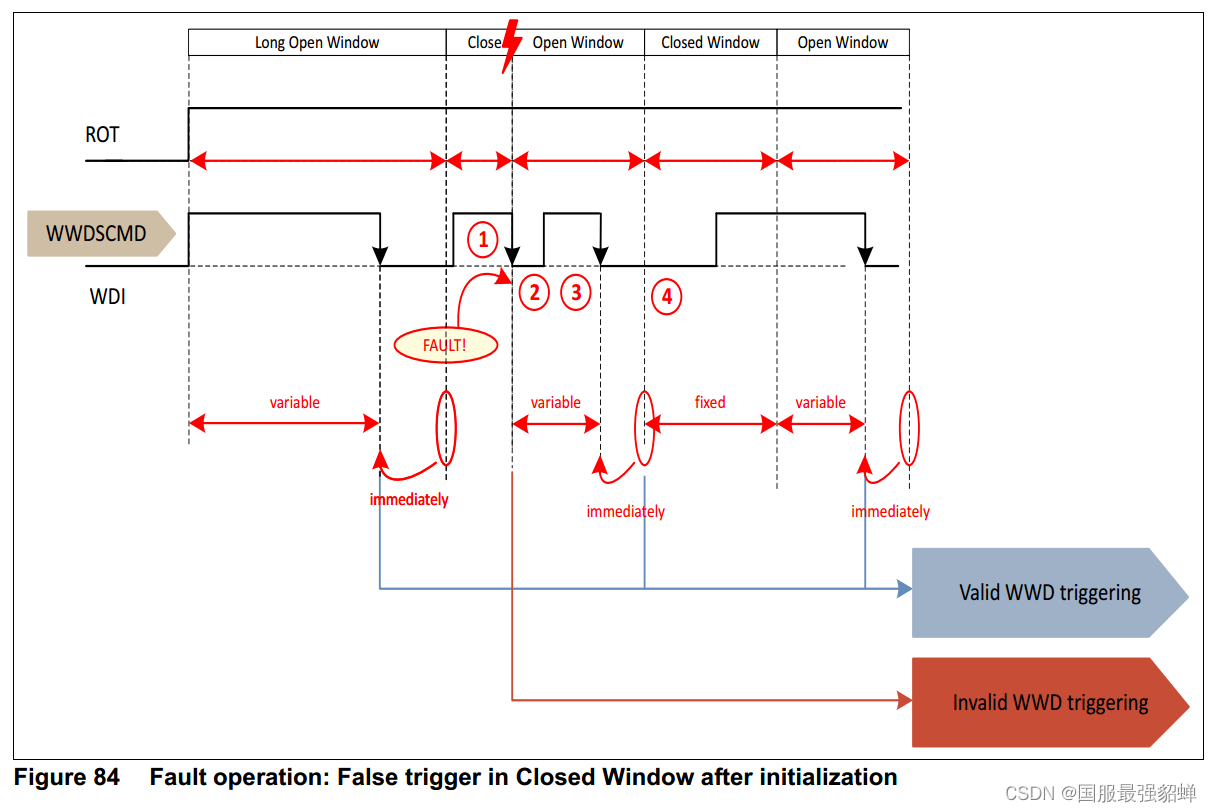
-
“关闭窗口”期间的触发被指示为“无效WWD触发”。该事件由中断指示,并且窗口看门狗故障计数器增加 2。
-
“关闭窗口”将因“WWD 触发无效”而关闭。最初它会持续时间 tWD,CW。错误触发终止“关闭窗口”并启动“打开窗口”,以使微处理器有机会同步到窗口看门狗周期。
-
在此“打开窗口”内预计会发生有效触发。有效的触发会终止“打开窗口”,这使得“打开窗口”的持续时间可变并取决于触发。这被视为“有效 WWD 触发”并启动“关闭窗口”。在不发出中断的情况下,窗口看门狗故障计数器将减 1。
-
接下来的“关闭窗口”持续时间tWD,CW。在此时间内触发将被视为“无效WWD触发”。
引脚 ROT 的行为取决于 ΣWWO 的值。在上面的例子中,假设无效触发不会导致超过阈值ΣWWO。
15.2.1.5 Fault operation: False trigger in Closed Window in steady state 故障操作:稳态关闭窗口中的误触发
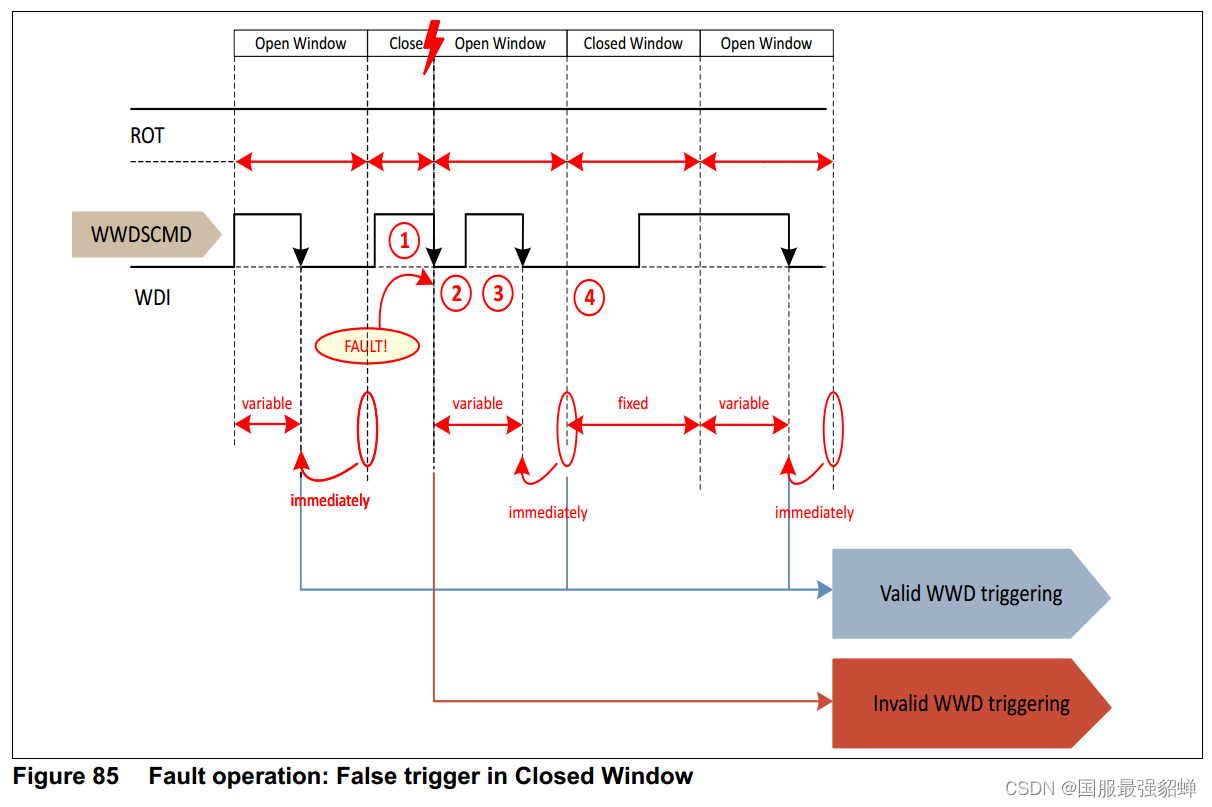
-
“关闭窗口”期间的触发被指示为“无效WWD触发”。该事件由中断指示,并且窗口看门狗故障计数器增加 2。
-
“关闭窗口”将因“WWD 触发无效”而关闭。最初它会持续时间 tWD,CW。错误触发终止“关闭窗口”并启动“打开窗口”,以使微处理器有机会同步到窗口看门狗周期。
-
在此“打开窗口”内预计会发生有效触发。有效的触发会终止“打开窗口”,这使得“打开窗口”的持续时间可变并取决于触发。这被视为“有效 WWD 触发”并启动“关闭窗口”。在不发出中断的情况下,窗口看门狗故障计数器将减 1。
-
接下来的“关闭窗口”持续时间tWD,CW。在此时间内触发将被视为“无效WWD触发”。
引脚 ROT 的行为取决于 ΣWWO 的值。在上面的例子中,假设无效触发不会导致超过阈值ΣWWO。
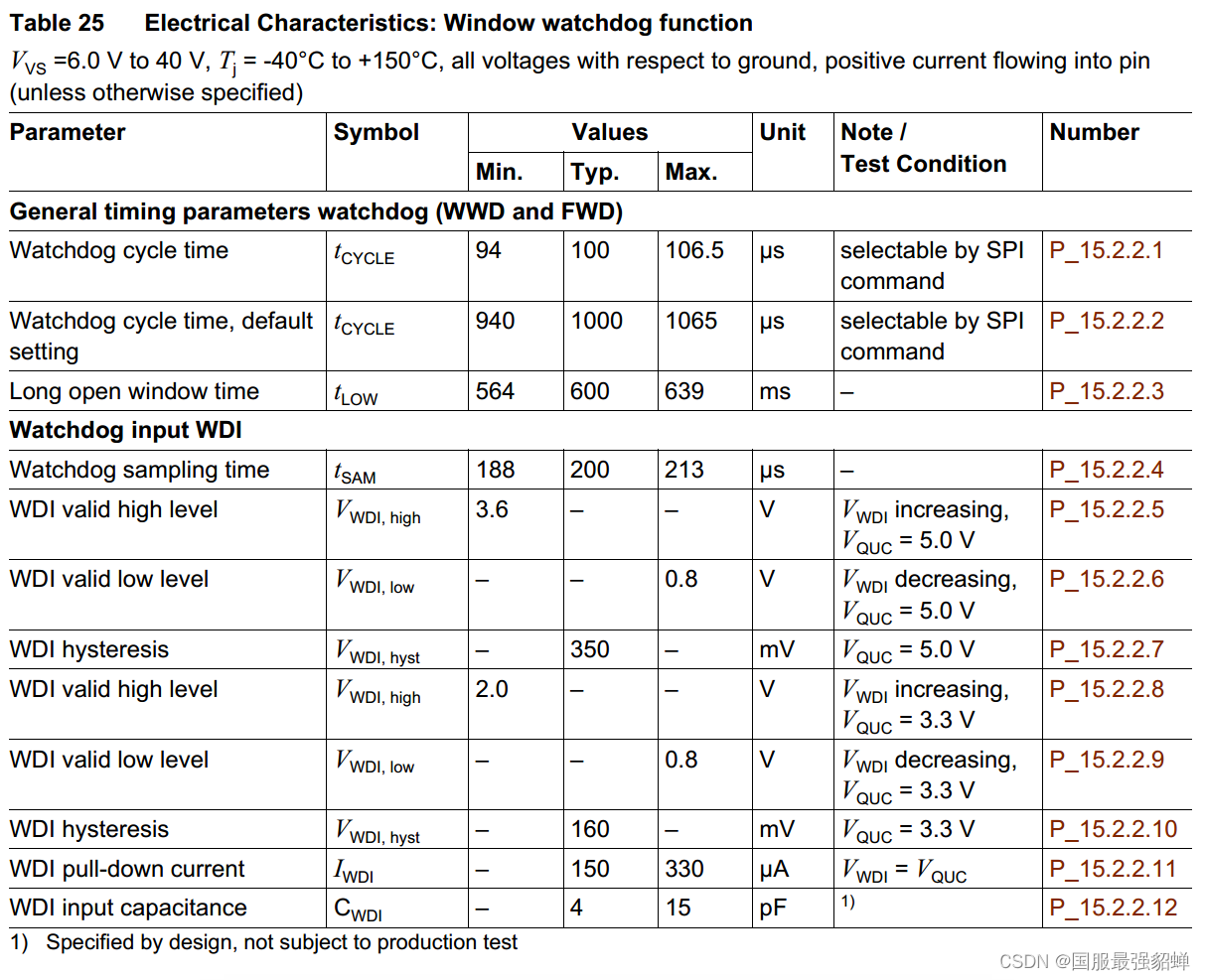
15.2.2 Electrical characteristics
通用时序参数看门狗(WWD 和 FWD)
看门狗输入WDI
15.3 Functional Watchdog
工作原理
TLF35584 中集成了功能看门狗或问答看门狗来监视微控制器。在稳定状态下,会生成一个问题(从表中取出),同时所谓的心跳计数器从零开始计数。心跳计数器开始计数,直到心跳周期结束。心跳周期的持续时间设置为默认值,但可以通过 SPI 命令进行调整。问题由 4 位组成,预期答案由 4 个响应组成,每个响应为 8 位。这四个响应应在心跳周期结束之前发送。最后的响应应写入同步响应寄存器以重置心跳计数器。
初始化
当器件首次上电时,功能看门狗默认关闭。可以通过 SPI 写入 WDCFG0.FWDEN 来启用它。
配置
功能看门狗可以配置为 INIT、NORMAL 和 WAKE 状态。 “配置”是指:
• 根据应用的需要,通过SPI 命令修改心跳周期的长度。(周期时间 WDCYC 和心跳周期数 WDHBTP 的组合)
• 功能看门狗故障计数器溢出的阈值可由 SPI 定义。心跳周期基于表 25 中指定的周期时间 tCYCLE。
正常操作
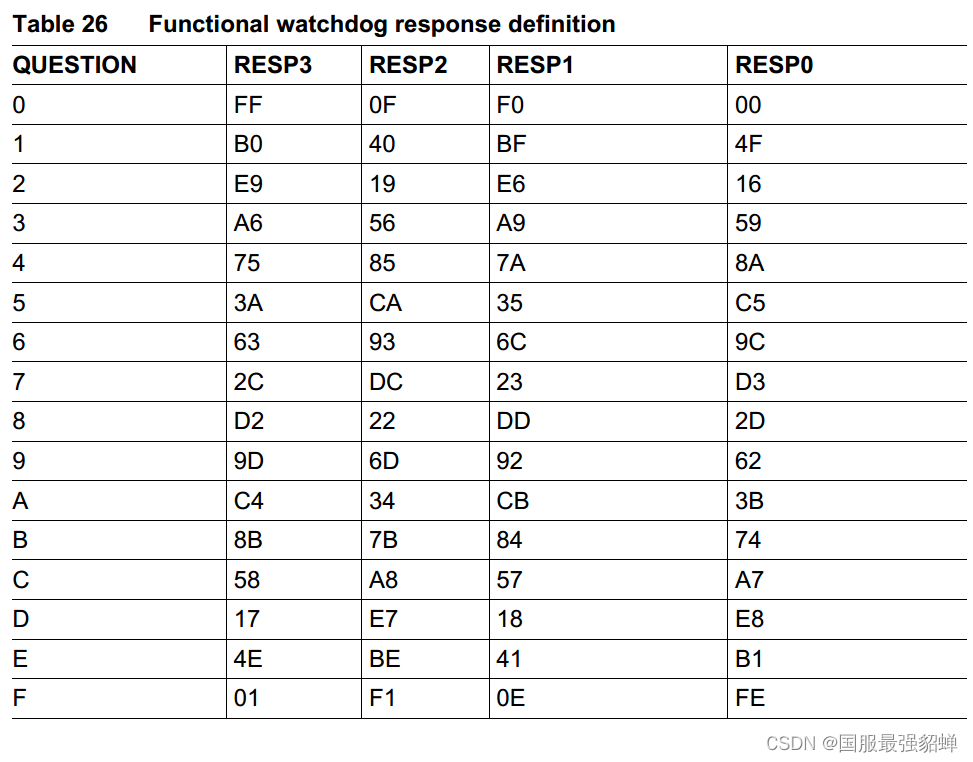
该问题从表 26 中取出,正确答案列在同一行中。响应序列必须保留,并且可以在发送响应之前从响应计数器 FWDSTAT0.FWDRSPC 得出。
对表中定义的实际问题的响应应由四个后续响应字节组成。
对 FWDSTAT0.FWDQUEST 寄存器中给定问题的正确回答应按以下方式完成。
• 前三个响应应写入FWDRSP
• 最后一个响应应写入FWDRSPSYNC 以重置心跳计时器
所有四个响应必须在心跳周期到期之前写入。
如果完整响应(32 位)正确,并且最后一个响应字节是通过同步响应发送的,则心跳计数器将被重置并设置为零。如果完整答案(所有四个响应 - 32 位)正确,则视为“有效 FWD 触发”,功能看门狗错误计数器 ΣFWO 减 1。如果最后一个响应是通过同步响应发送的,则心跳计数器将复位,但如果答案错误,则视为“无效 FWD 触发”,并且功能看门狗错误计数器 ΣFWO 加 2。
功能看门狗错误计数器 ΣFWO 溢出将触发“Move to INIT”事件,重置心跳计数器并将功能看门狗错误计数器 ΣFWO 设置为零。
功能看门狗响应定义
功能看门狗输出 FWO
功能看门狗输出 FWO 是一个内部信号:它连接到 FWD 故障计数器。功能看门狗 FWO 输出的值为“有效 FWD 触发”或“无效 FWD 触发”。
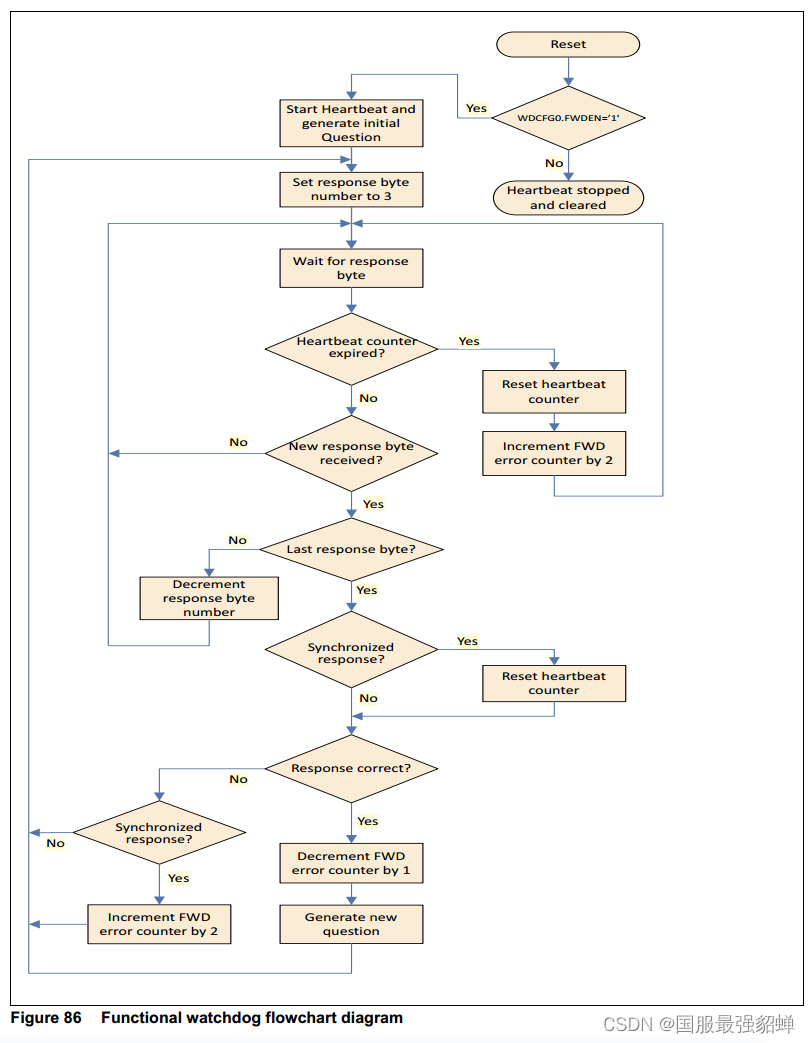
看门狗功能流程图
15.3.1 Timing Diagrams 时序图
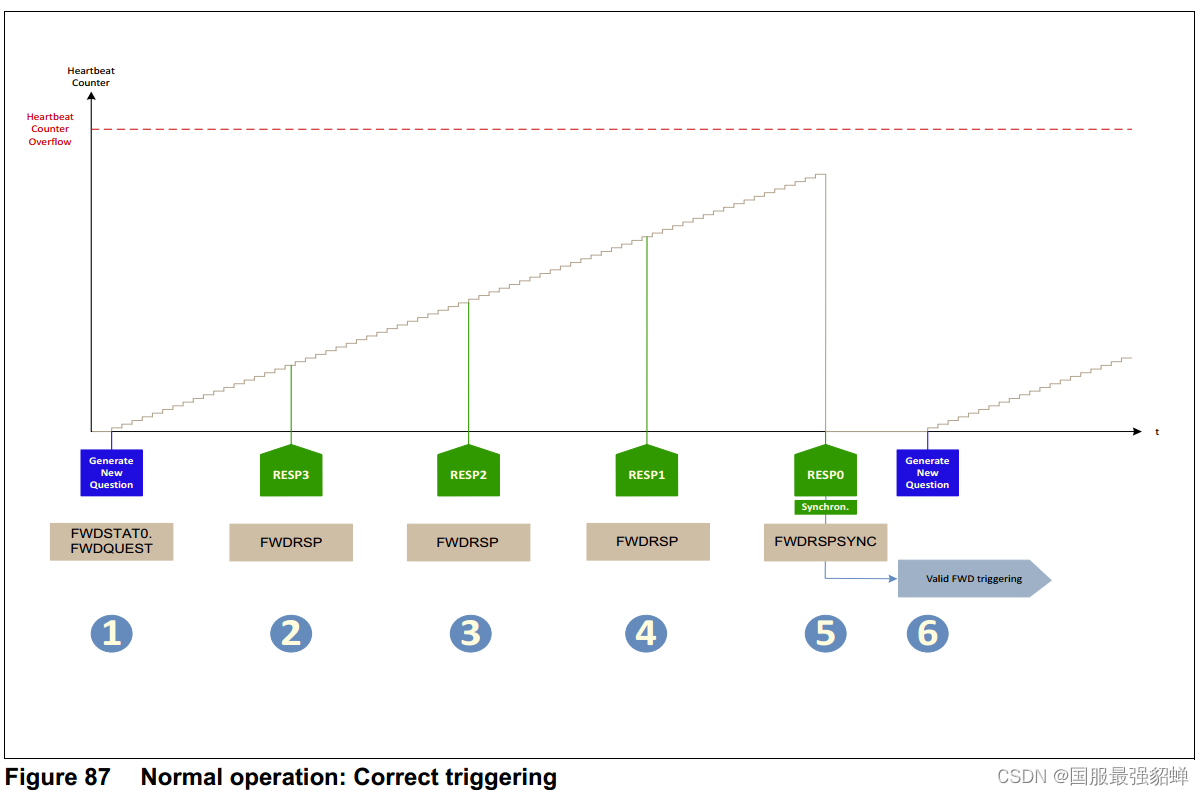
15.3.1.1 Normal operation: Correct triggering 正常操作:正确触发
-
生成一个新问题,同时心跳计数器开始计数(假设之前发生过“有效 FWD 触发”)。
-
接收到正确的响应(RESP3)
-
接收到正确的响应(RESP2)
-
接收到正确的响应(RESP1)
-
接收到正确的同步响应(RESP0)。所有响应均正确,响应顺序正确,并且在心跳计数器溢出之前收到最后一个同步响应。心跳计数器将被重置(设置为零)。这被视为“有效 FWD 触发”,功能看门狗错误计数器 ΣFWO 减 1(如果功能看门狗错误计数器值大于零)。
-
生成一个新问题,同时心跳计数器开始计数
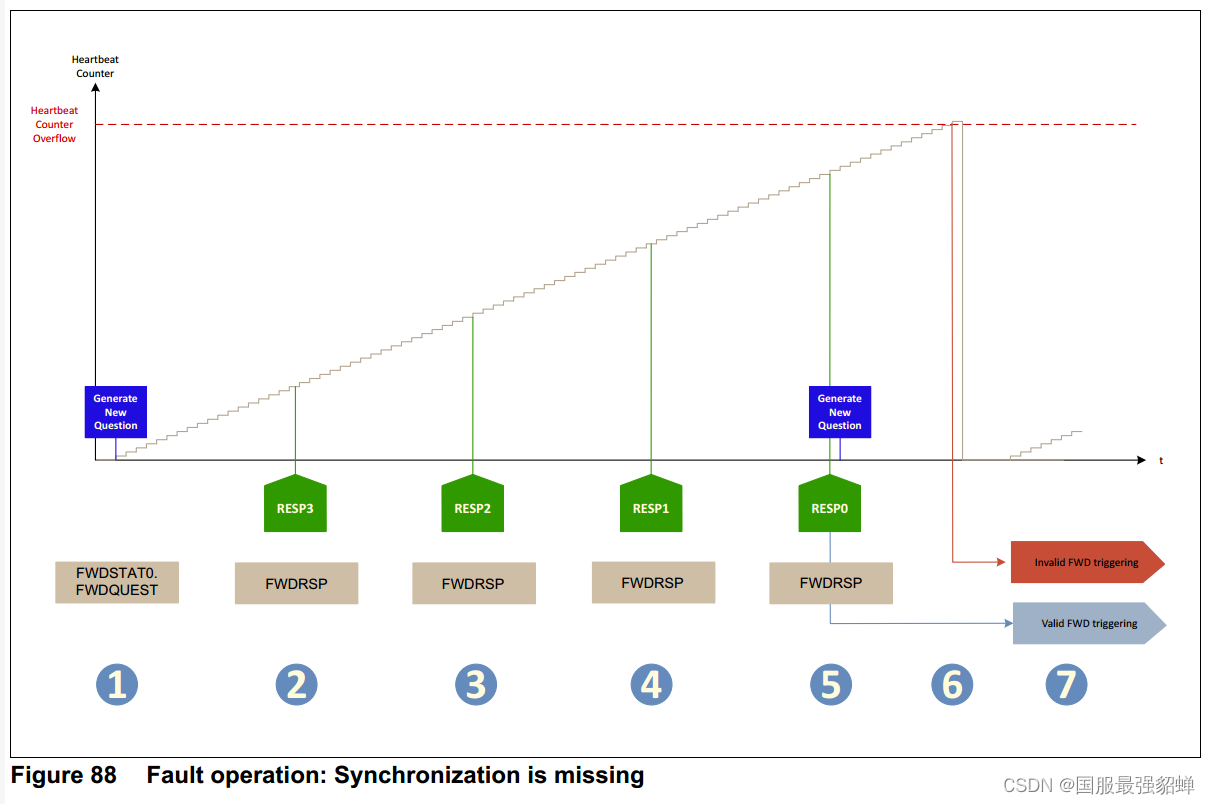
15.3.1.2 Fault operation: Synchronization is missing 故障操作:同步丢失
-
生成一个新问题,同时心跳计数器开始计数(假设之前发生过“有效 FWD 触发”)。
-
收到正确的响应 (RESP3)
-
收到正确的响应 (RESP2)
-
收到正确的响应 (RESP1)
-
收到正确的响应 (RESP0),但不同步(写入错误的寄存器) 。到目前为止,所有响应都是正确的,响应顺序是正确的,并且在心跳计数器溢出发生之前收到了最后一个不同步的响应。心跳计数器不会被重置并继续计数。这被视为“有效 FWD 触发”,功能看门狗错误计数器 ΣFWO 减 1(如果功能看门狗错误计数器值大于零)。生成了一个新问题。
-
心跳计数器仍在计数,等待新问题的答案。稍后,心跳计数器将到期并发生溢出。这被视为“无效 FWD 触发”。功能看门狗错误计数器 ΣFWO 加 2。心跳计数器复位。
-
心跳计数器开始计数。不会产生新问题。
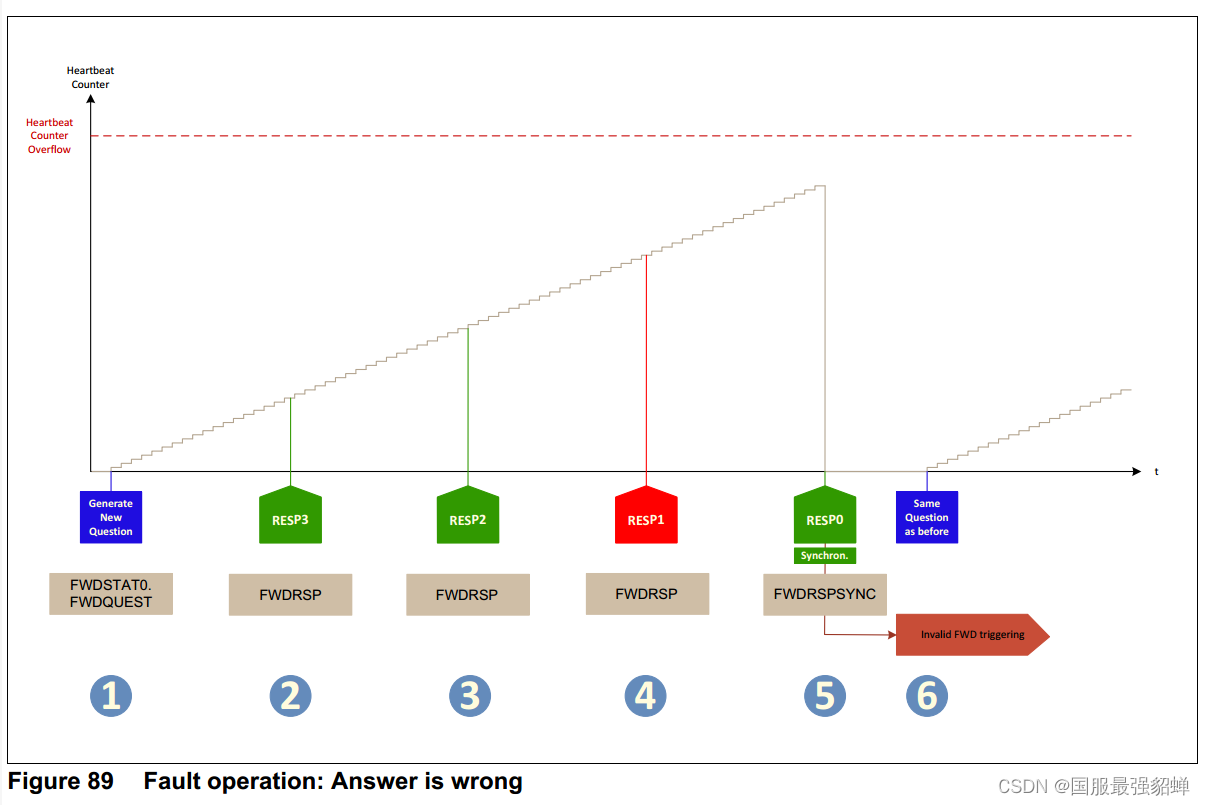
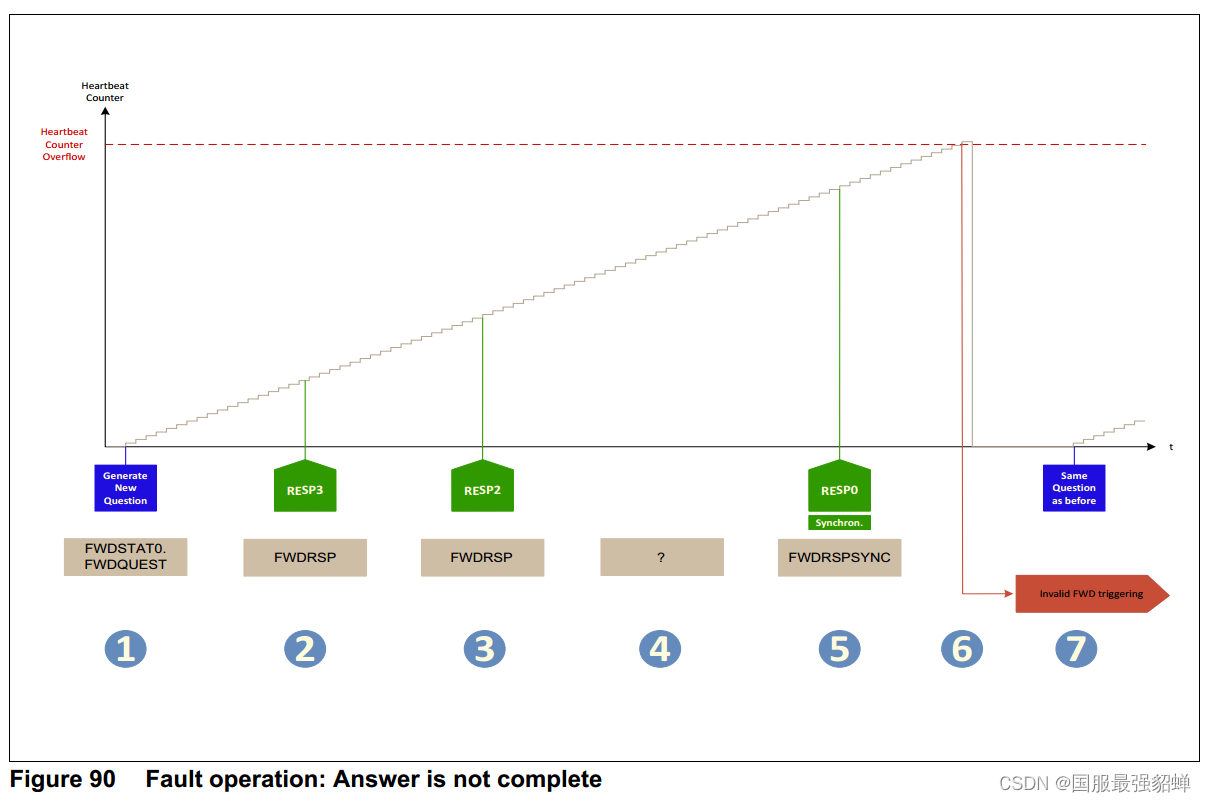
15.3.1.3 Fault operation: Answer is wrong 故障操作:答案错误
-
生成一个新问题,同时心跳计数器开始计数(假设之前发生过“有效 FWD 触发”)
-
收到正确响应(RESP3)
-
收到正确响应( RESP2)
-
收到错误响应 (RESP1)
-
收到正确响应 (RESP0)。心跳计数器将被重置(设置为零)。完整的答案是不正确的。这被视为“无效 FWD 触发”。功能看门狗错误计数器 ΣFWO 加 2。心跳计数器复位。
-
没有生成新问题,但心跳计数器开始计数。
注意:如果 RESP2 和 RESP1 混合,则两个响应都将被视为不正确 - 响应必须以正确的顺序发送。
15.3.1.4 Fault operation: Missing response 故障操作:缺少响应
-
生成一个新问题,同时心跳计数器开始计数(假设之前发生过“有效 FWD 触发”)。
-
接收到正确的响应 (RESP3)
-
接收到正确的响应 (RESP2)
-
响应丢失 (RESP1)
-
接收到正确的响应 (RESP0)。因此,由于缺少响应(在此示例中为 RESP1),最后一个响应不是最后一个响应,而是倒数第二个响应。功能看门狗将等待所有四个响应被写入,而心跳计数器继续计数。所有四个响应没有固定时间,但必须在心跳计数器到期之前以正确的顺序发送。
-
由于缺少响应 RESP1,完整答案不正确。虽然最后的响应是同步的,但是心跳计数器不会被重置并继续计数,直到发生溢出。这被视为“无效 FWD 触发”。功能看门狗错误计数器 ΣFWO 加 2。心跳计数器复位。
-
不再生成新问题,心跳计数器开始计数。
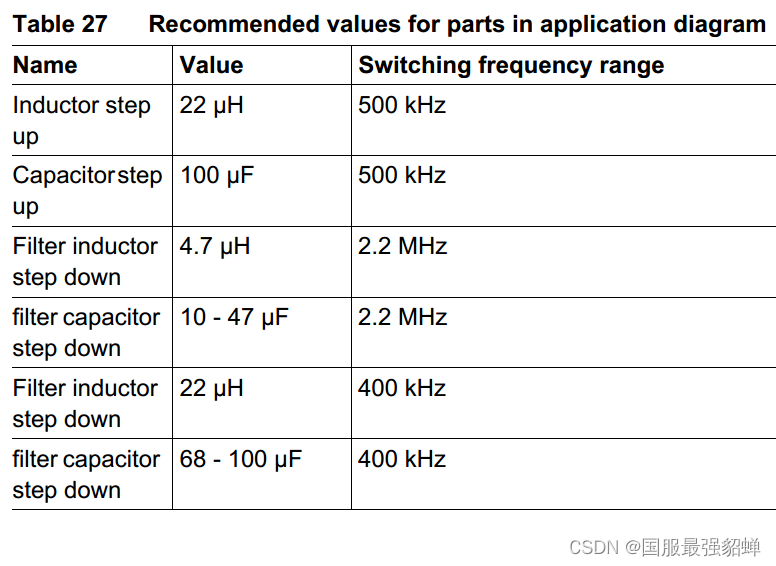
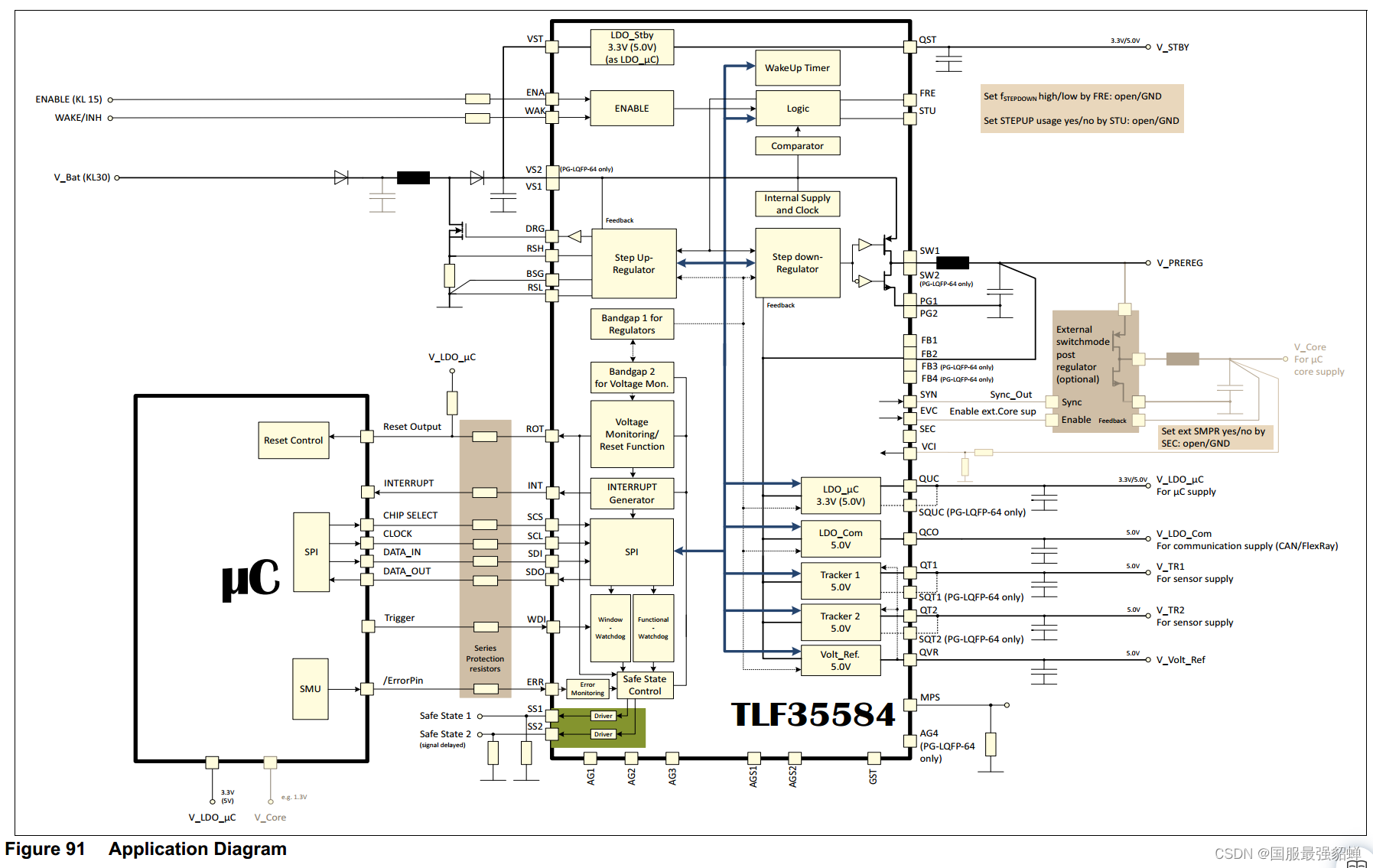
16 Application Information 应用信息
这是 IC 在其环境中如何使用的描述。 注意:以下信息仅作为设备实施的提示,不应被视为对设备的某些功能、状况或质量的描述或保证。 。
• 请联系我们获取更多支持文档。
• 如需了解更多信息,您可以联系 http://www.infineon.com/
注意:下图是一个非常简化的应用电路示例。该功能必须在实际应用中进行验证。
17 Package Outlines 封装外形