分类目录:《深入理解强化学习》总目录
为了大致评估贪心方法和
ϵ
−
\epsilon-
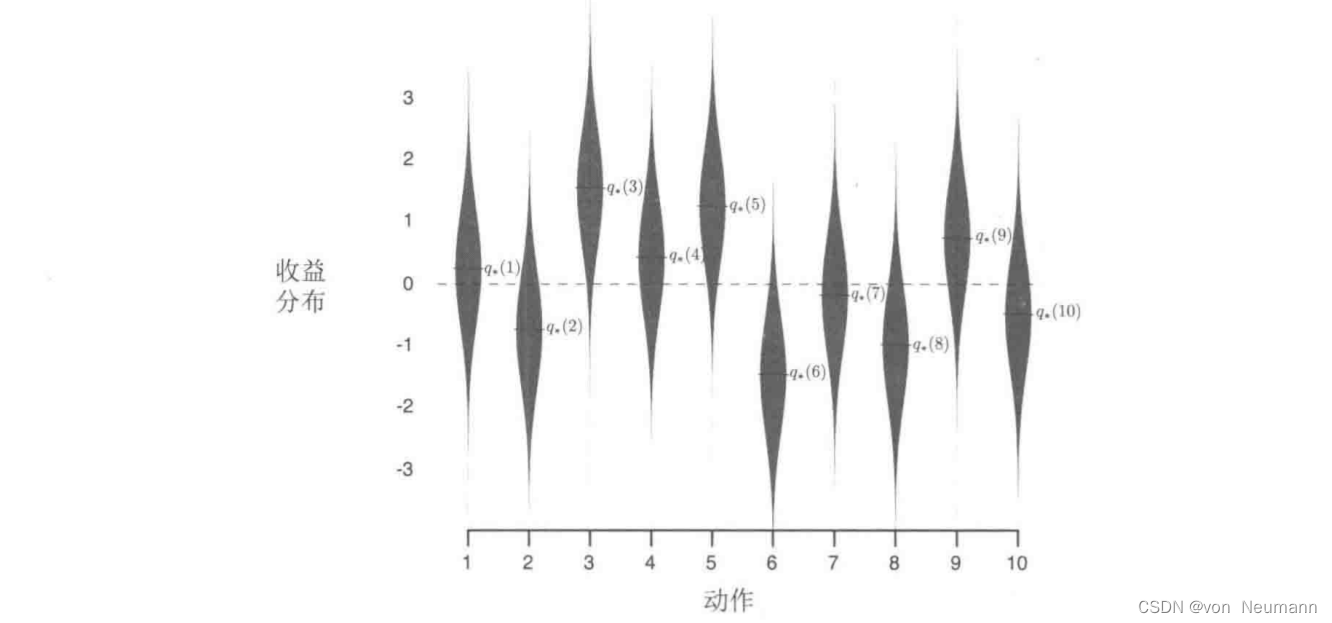
ϵ−贪心方法相对的有效性,我们将它们在一系列测试问题上进行了定量比较。这组问题是2000个随机生成的
k
k
k臂赌博机问题,且
k
=
10
k=10
k=10。在每一个赌博机问题中,如下图显示的那样,动作的真实价值为
q
∗
(
a
)
,
a
=
1
,
2
,
⋯
,
10
q_*(a), a=1, 2, \cdots, 10
q∗(a),a=1,2,⋯,10,从一个均值为
0
0
0方差为
1
1
1的标准正态(高斯)分布中选择。当对应于该问题的学习方法在
t
t
t时刻选择
A
t
A_t
At时,实际的收益
R
t
R_t
Rt则由一个均值为
q
∗
(
A
t
)
q_*(A_t)
q∗(At)方差为
1
1
1的正态分布决定。在下图中,这些分布显示为灰色区域。我们将这一系列测试任务称为10臂测试平台。对于任何学习方法,随着它在与一个赌博机问题的1000时刻交互中经验的积累,我们可以评估它的性能和动作。这构成了一轮试验。用2000个不同的赌博机问题独立重复2000个轮次的试验,我们就得到了对这个学习算法的平均表现的评估。
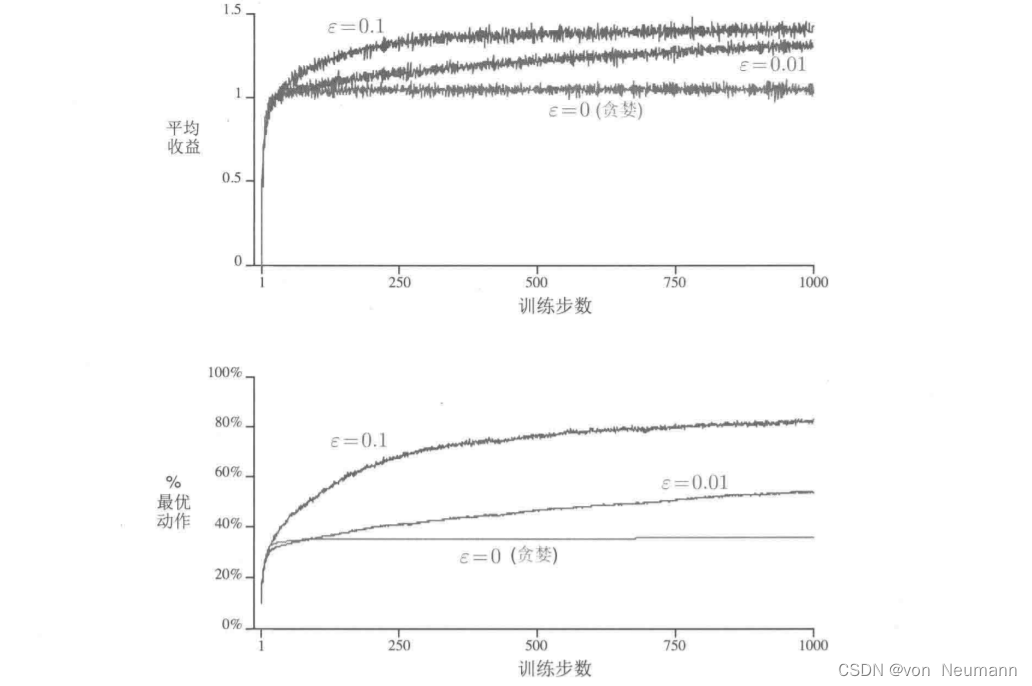
下图在一个10臂测试平台上比较了上述的贪心方法和两种
ϵ
−
\epsilon-
ϵ−贪心方法(
ϵ
=
0.01
\epsilon=0.01
ϵ=0.01和
ϵ
=
0.1
\epsilon=0.1
ϵ=0.1)。所有方法都用采样平均策略来形成对动作价值的估计。上部的图显示了期望的收益随着经验的增长而增长。贪心方法在最初增长得略微快一些,但是随后稳定在一个较低的水平。相对于在这个测试平台上最好的可能收益
1.55
1.55
1.55,这个方法每时刻只获得了大约1的收益。从长远来看,贪心的方法表现明显更糟,因为它经常陷入执行次优的动作的怪圈。下部的图显示贪心方法只在大约三分之一的任务中找到最优的动作。在另外三分之二的动作中,最初采样得到的动作非常不好,贪心方法无法跳出来找到最优的动作。
ϵ
−
\epsilon-
ϵ−贪心方法最终表现更好,因为它们持续地试探并且提升找到最优动作的机会。
ϵ
=
0.1
\epsilon=0.1
ϵ=0.1的方法试探得更多,通常更早发现最优的动作,但是在每时刻选择这个最优动作的概率却永远不会超过91%(因为要在
ϵ
=
0.1
\epsilon=0.1
ϵ=0.1的情况下试探)。
ϵ
=
0.01
\epsilon=0.01
ϵ=0.01的方法改善得更慢,但是在图中的两种测度下,最终的性能表现都会比
ϵ
=
0.1
\epsilon=0.1
ϵ=0.1的方法更好。为了充分利用高和低的
ϵ
\epsilon
ϵ值的优势,随着时刻的推移来逐步减小
ϵ
\epsilon
ϵ也是可以的。
ϵ
−
\epsilon-
ϵ−贫心方法相对于贪心方法的优点依赖于任务。比方说,假设收益的方差更大,不是1而是10,由于收益的噪声更多,所以为了找到最优的动作需要更多次的试探,而
ϵ
−
\epsilon-
ϵ−贪心方法会比贪心方法好很多。但是,如果收益的方差是0,那么贪心方法会在尝试一次之后就知道每一个动作的真实价值。在这种情况下,贪心方法实际上可能表现最好,因为它很快就会找到最佳的动作,然后再也不会进行试探。但是,即使在有确定性的情况下,如果我们弱化一些假设,对试探也有很大的好处。例如,假设赌博机任务是非平稳的,也就是说,动作的真实价值会随着时间而变化。在这种情况下,即使在有确定性的情况下,试探也是需要的,这是为了确认某个非贪心的动作不会变得比贪心动作更好。如我们将在接下来的几章中所见,非平稳性是强化学习中最常遇到的情况。即使每一个单独的子任务都是平稳而且确定的,学习者也会面临一系列像赌博机一样的决策任务,每个子任务的决策随着学习的推进会有所变化,这使得智能体的整体策略也会不断变化。强化学习需要在开发和试探中取得平衡。
参考文献:
[1] 张伟楠, 沈键, 俞勇. 动手学强化学习[M]. 人民邮电出版社, 2022.
[2] Richard S. Sutton, Andrew G. Barto. 强化学习(第2版)[M]. 电子工业出版社, 2019
[3] Maxim Lapan. 深度强化学习实践(原书第2版)[M]. 北京华章图文信息有限公司, 2021
[4] 王琦, 杨毅远, 江季. Easy RL:强化学习教程 [M]. 人民邮电出版社, 2022