STM32存储左右互搏 SPI总线读写FLASH W25QXX
FLASH是常用的一种非易失存储单元,W25QXX系列Flash有不同容量的型号,如W25Q64的容量为64Mbit,也就是8MByte。这里介绍STM32CUBEIDE开发平台HAL库操作W25Q各型号FLASH的例程。
W25QXX介绍
W25QXX的SOIC封装如下所示,在采用SPI而不是QUAL SPI时,管脚定义为:

即由片选(/CS), 时钟(CLK), 数据输出(DO)和数据输入(DI)的组成4线SPI信号接口。VCC和GND提供电源和接地连接。
例程采用STM32H750VBT6芯片, FLASH可以选择为8/16/32/64/128/256/512/1024 Mbit的W25Q型号。
STM32工程配置
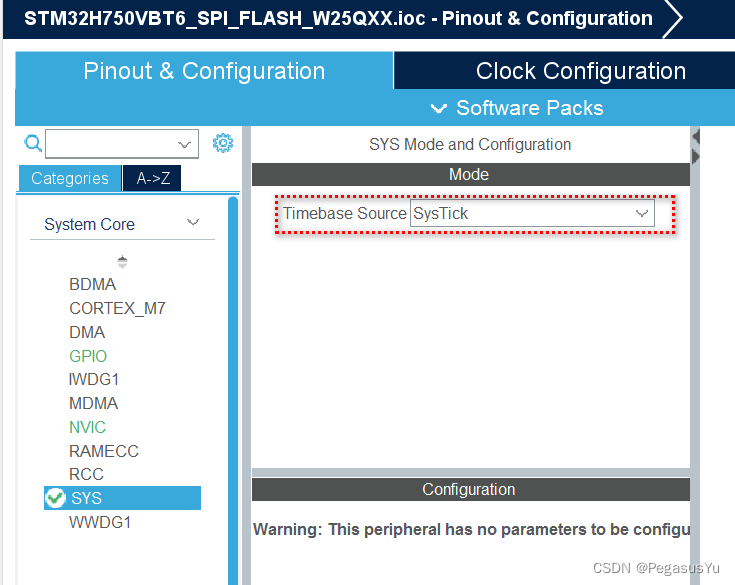
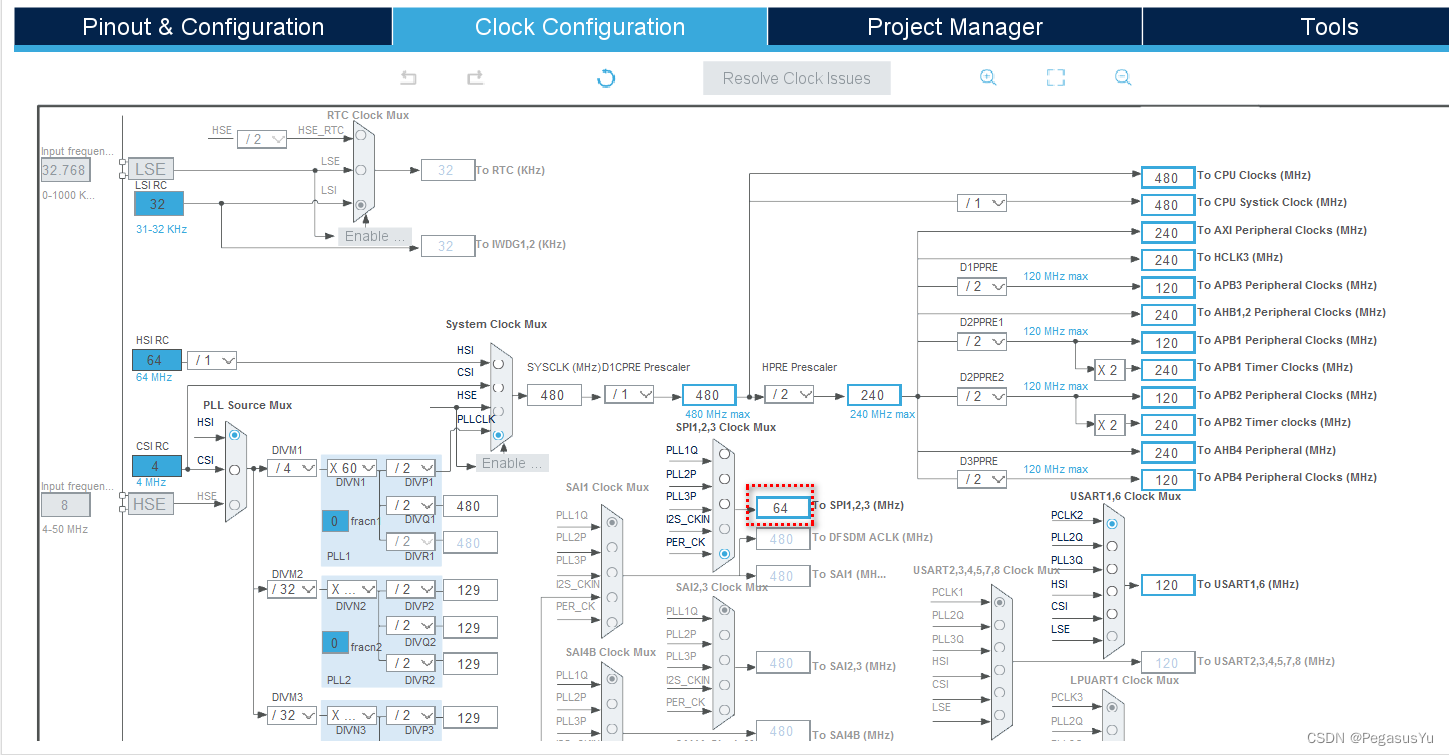
首先建立基本工程并设置时钟:
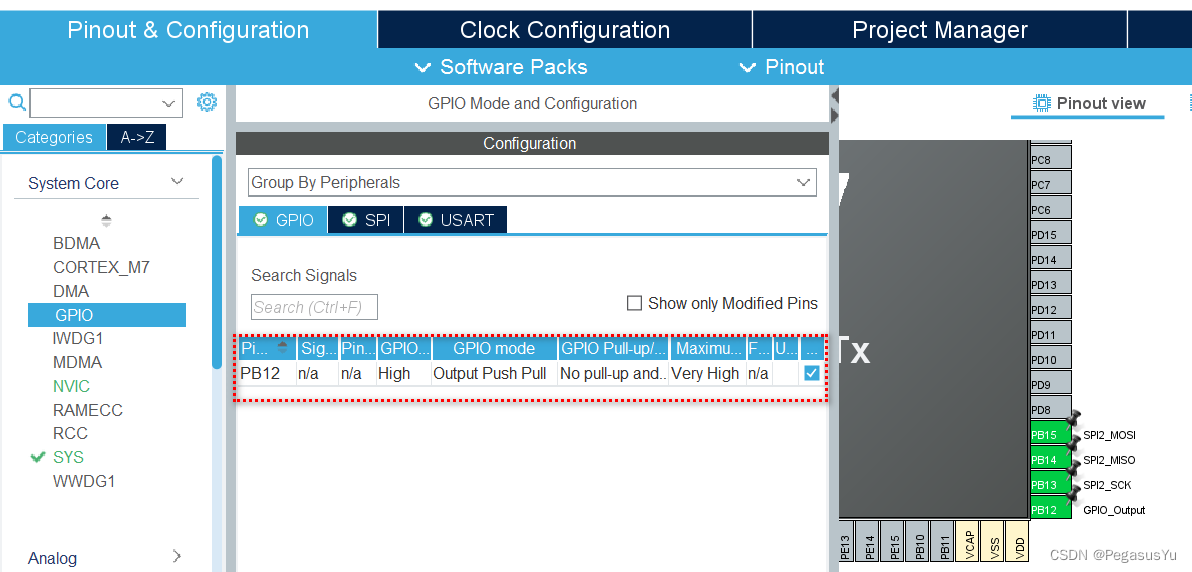
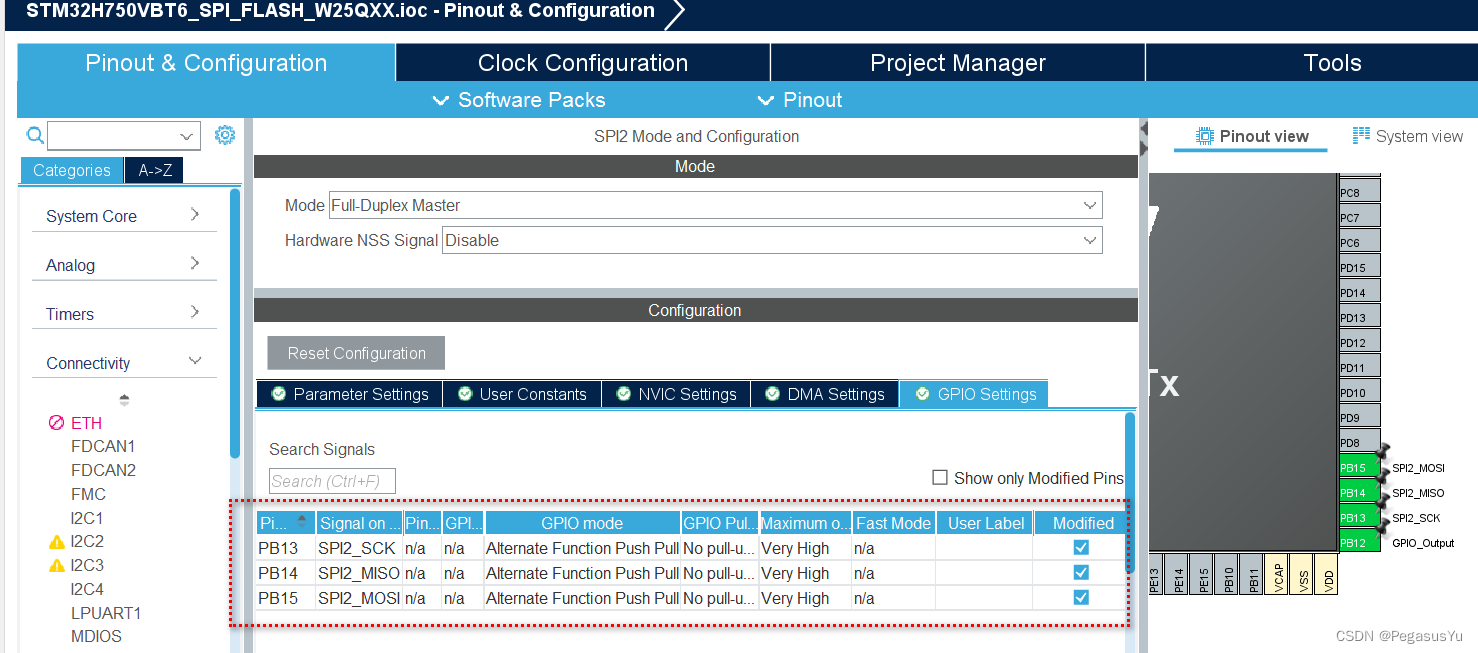
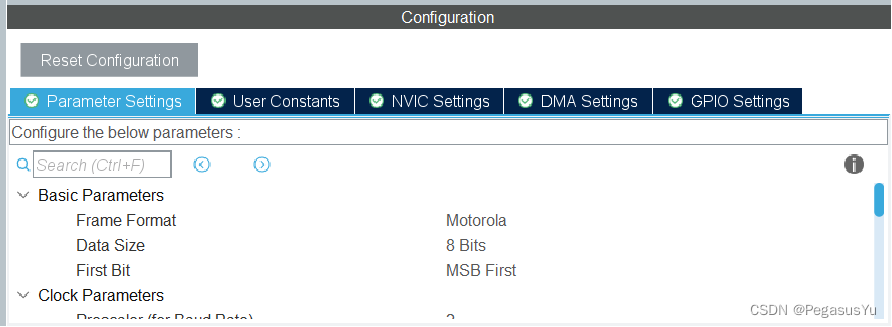
选择硬件接口SPI2为FLASH连接接口,片选采用软件代码控制方式,单独设置为输出GPIO:
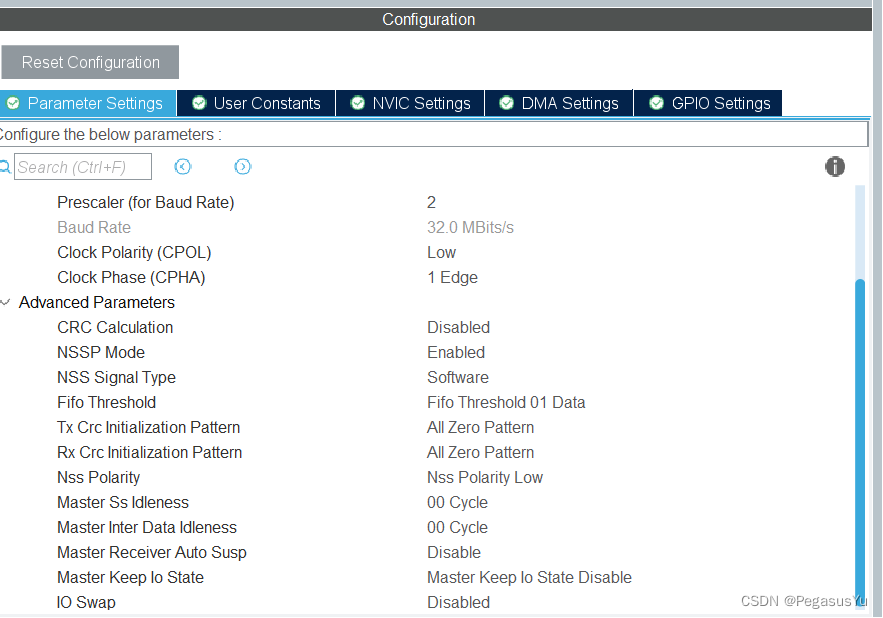
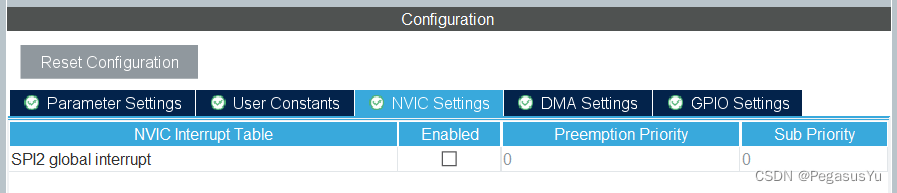
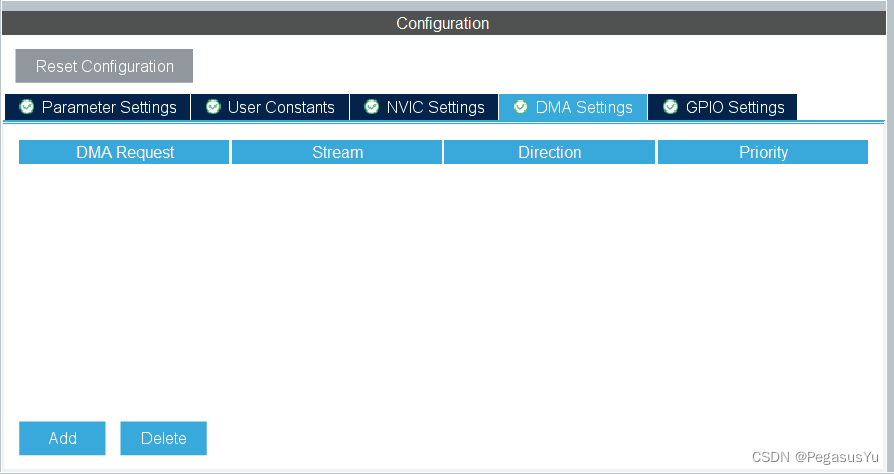
不采用中断和DMA方式,需要时可以再添加,调用相对应的操作库函数及补充中断处理函数即可。
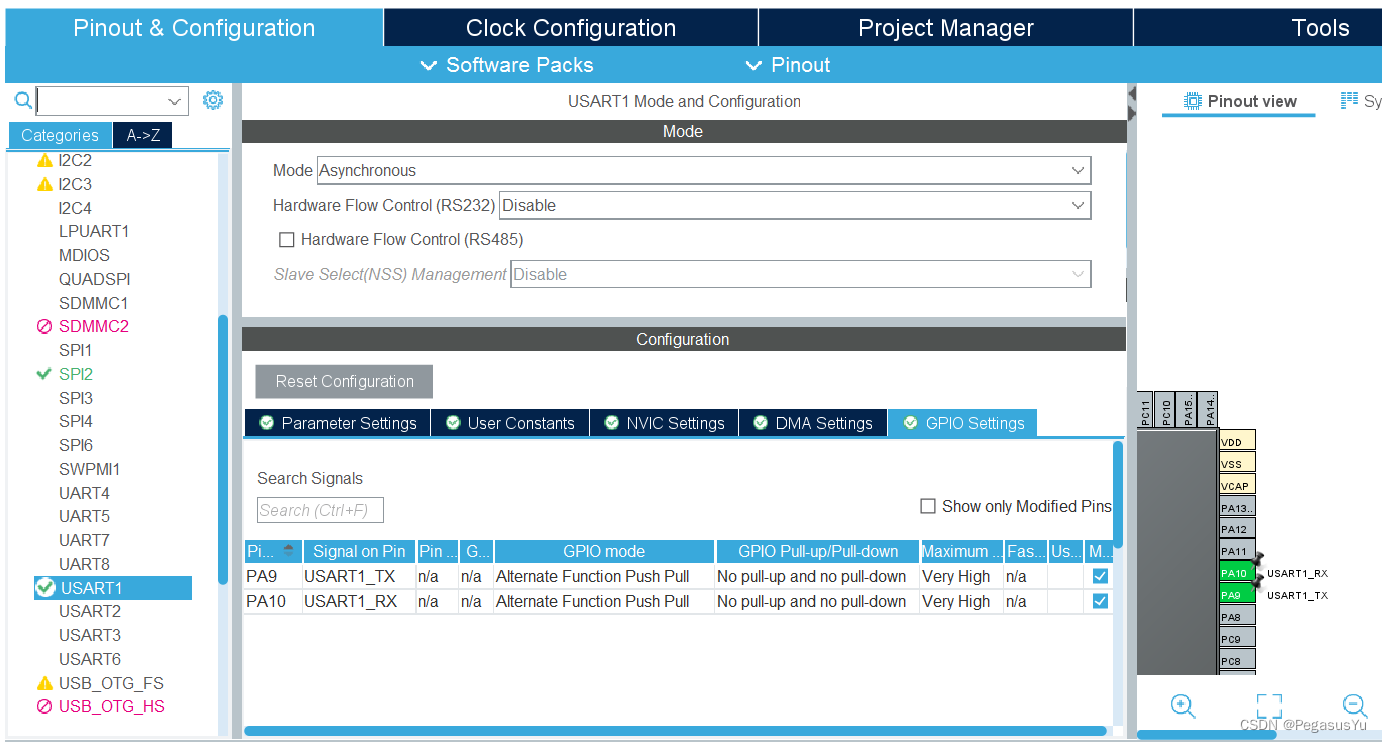
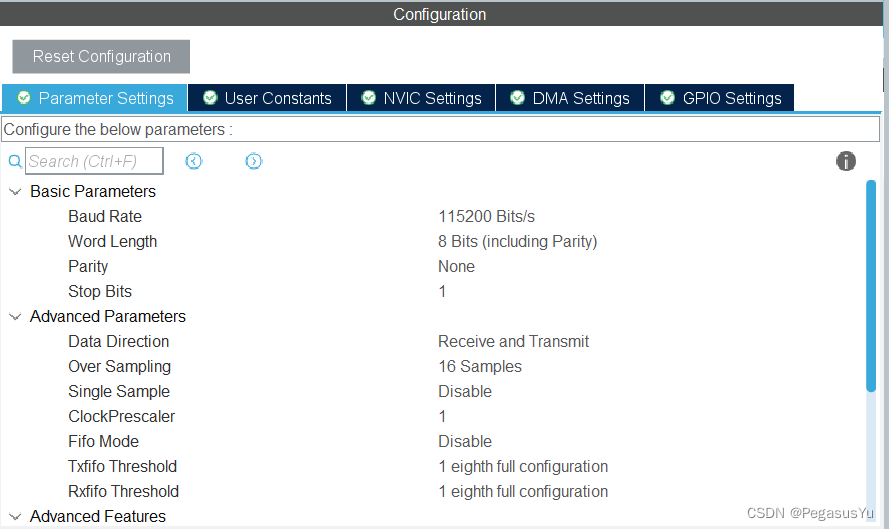
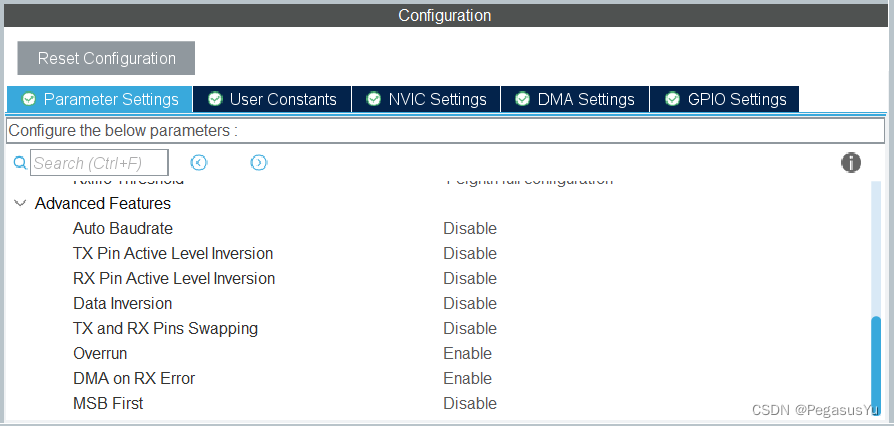
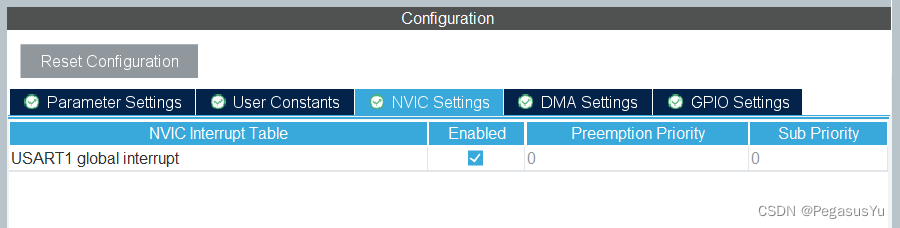
配置UART1用于控制打印:
STM32H7资源较多,可以将堆栈开大:
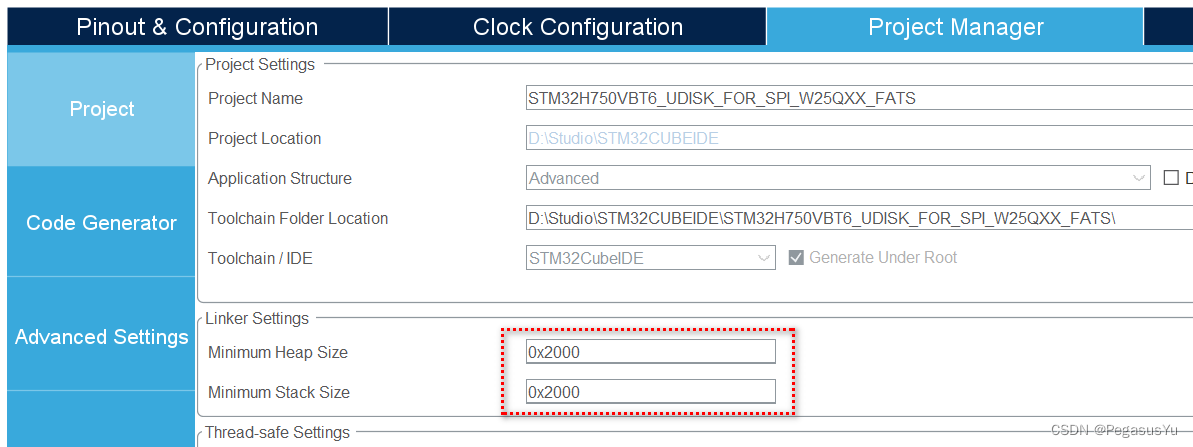
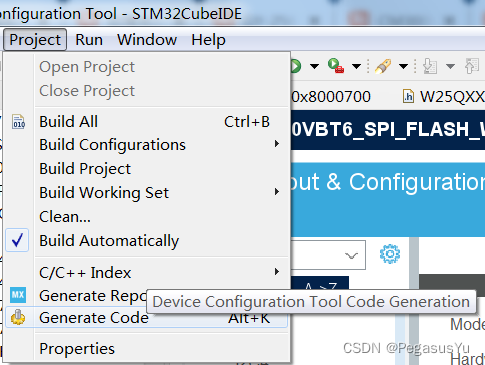
保存并生成初始工程代码:
STM32工程代码
UART串口printf打印输出实现参考:STM32 UART串口printf函数应用及浮点打印代码空间节省 (HAL)
建立W25Q访问的库头文件W25QXX.h:
#ifndef INC_W25QXX_H_
#define INC_W25QXX_H_
#include "main.h"
uint8_t SPI2_ReadWriteByte(uint8_t TxData);
//W25QXX serial chip list:
#define W25Q20_ID 0XEF11
#define W25Q40_ID 0XEF12
#define W25Q80_ID 0XEF13
#define W25Q16_ID 0XEF14
#define W25Q32_ID 0XEF15
#define W25Q64_ID 0XEF16
#define W25Q128_ID 0XEF17
#define W25Q256_ID 0XEF18
#define W25Q512_ID 0XEF19
#define W25Q1024_ID 0XEF20
extern uint16_t W25QXX_TYPE; //To indicate W25QXX type used in this procedure
//W25QXX chip select control function
#define W25QXX_CS(n) ( n ? HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET) : HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET) )
//command table for W25QXX access
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg1 0x05
#define W25X_ReadStatusReg2 0x35
#define W25X_ReadStatusReg3 0x15
#define W25X_WriteStatusReg1 0x01
#define W25X_WriteStatusReg2 0x31
#define W25X_WriteStatusReg3 0x11
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define W25X_Enable4ByteAddr 0xB7
#define W25X_Exit4ByteAddr 0xE9
uint8_t W25QXX_Init(void);
uint16_t W25QXX_ReadID(void); //Read W25QXX ID
uint8_t W25QXX_ReadSR(uint8_t reg_num); //Read from status register
void W25QXX_4ByteAddr_Enable(void); //Enable 4-byte address mode
void W25QXX_Write_SR(uint8_t reg_num,uint8_t d); //Write to status register
void W25QXX_Write_Enable(void); //Write enable
void W25QXX_Write_Disable(void); //Write disable
void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite); //Write operation w/o check
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead); //Read operation
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite); //Write operation
void W25QXX_Erase_Chip(void); //Erase whole chip
void W25QXX_Erase_Sector(uint32_t Sector_Num); //Erase sector in specific sector number
void W25QXX_Wait_Busy(void); //Wait idle status before next operation
void W25QXX_PowerDown(void); //Enter power-down mode
void W25QXX_WAKEUP(void); //Wake-up
#endif /* INC_W25QXX_H_ */
建立W25Q访问的库源文件W25QXX.c:
#include "W25QXX.h"
extern SPI_HandleTypeDef hspi2;
extern void PY_Delay_us_t(uint32_t Delay);
//Write and read one byte in SPI2
uint8_t SPI2_ReadWriteByte(uint8_t TxData)
{
uint8_t Rxdata;
HAL_SPI_TransmitReceive(&hspi2,&TxData,&Rxdata,1, 1000);
return Rxdata;
}
uint16_t W25QXX_TYPE=W25Q64_ID;
//W25QXX initialization
uint8_t W25QXX_Init(void)
{
uint8_t temp;
W25QXX_CS(1);
W25QXX_TYPE=W25QXX_ReadID();
if((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID))
{
temp=W25QXX_ReadSR(3); //read status register 3
if((temp&0X01)==0) //judge address mode and configure to 4-byte address mode
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_Enable4ByteAddr);
W25QXX_CS(1);
}
}
if((W25QXX_TYPE==0x0000)||(W25QXX_TYPE==0xFFFF)) return 0;
else return 1;
}
//Read status registers of W25QXX
//reg_num: register number from 1 to 3
//return: value of selected register
//SR1 (default 0x00):
//BIT7 6 5 4 3 2 1 0
//SPR RV TB BP2 BP1 BP0 WEL BUSY
//SPR: default 0, status register protection bit used with WP
//TB,BP2,BP1,BP0: FLASH region write protection configuration
//WEL: write enable lock
//BUSY: busy flag (1: busy; 0: idle)
//SR2:
//BIT7 6 5 4 3 2 1 0
//SUS CMP LB3 LB2 LB1 (R) QE SRP1
//SR3:
//BIT7 6 5 4 3 2 1 0
//HOLD/RST DRV1 DRV0 (R) (R) WPS ADP ADS
uint8_t W25QXX_ReadSR(uint8_t reg_num)
{
uint8_t byte=0,command=0;
switch(reg_num)
{
case 1:
command=W25X_ReadStatusReg1; //To read status register 1
break;
case 2:
command=W25X_ReadStatusReg2; //To read status register 2
break;
case 3:
command=W25X_ReadStatusReg3; //To read status register 3
break;
default:
command=W25X_ReadStatusReg1;
break;
}
W25QXX_CS(0);
SPI2_ReadWriteByte(command); //send command
byte=SPI2_ReadWriteByte(0Xff); //read data
W25QXX_CS(1);
return byte;
}
//Write status registers of W25QXX
//reg_num: register number from 1 to 3
//d: data for updating status register
void W25QXX_Write_SR(uint8_t reg_num,uint8_t d)
{
uint8_t command=0;
switch(reg_num)
{
case 1:
command=W25X_WriteStatusReg1; //To write status register 1
break;
case 2:
command=W25X_WriteStatusReg2; //To write status register 2
break;
case 3:
command=W25X_WriteStatusReg3; //To write status register 3
break;
default:
command=W25X_WriteStatusReg1;
break;
}
W25QXX_CS(0);
SPI2_ReadWriteByte(command); //send command
SPI2_ReadWriteByte(d); //write data
W25QXX_CS(1);
}
//W25QXX write enable
void W25QXX_Write_Enable(void)
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_WriteEnable);
W25QXX_CS(1);
}
//W25QXX write disable
void W25QXX_Write_Disable(void)
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_WriteDisable);
W25QXX_CS(1);
}
//Read chip ID
//return:
//0XEF11 for W25Q20
//0XEF12 for W25Q40
//0XEF13 for W25Q80
//0XEF14 for W25Q16
//0XEF15 for W25Q32
//0XEF16 for W25Q64
//0XEF17 for W25Q128
//0XEF18 for W25Q256
uint16_t W25QXX_ReadID(void)
{
uint16_t Temp = 0;
W25QXX_CS(0);
SPI2_ReadWriteByte(0x90); //send command
SPI2_ReadWriteByte(0x00);
SPI2_ReadWriteByte(0x00);
SPI2_ReadWriteByte(0x00);
Temp|=SPI2_ReadWriteByte(0xFF)<<8; //read high byte data
Temp|=SPI2_ReadWriteByte(0xFF); //read low byte data
W25QXX_CS(1);
return Temp;
}
//Read W25QXX from specific address for specific byte length
//pBuffer: data buffer
//ReadAddr: specific address
//NumByteToRead: specific byte length (max 65535)
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead)
{
uint16_t i;
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_ReadData); //send read command
if((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)) //send highest 8-bit address
{
SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>24));
}
SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>16)); //send 24-bit address
SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>8));
SPI2_ReadWriteByte((uint8_t)ReadAddr);
for(i=0;i<NumByteToRead;i++)
{
pBuffer[i]=SPI2_ReadWriteByte(0XFF); //read data
}
W25QXX_CS(1);
}
//Write W25QXX not more than 1 page (256 bytes)
//pBuffer: data buffer
//WriteAddr: specific address
//NumByteToWrite: specific byte length (max 256)
void W25QXX_Write_Page(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{
uint16_t i;
W25QXX_Write_Enable(); //write enable
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_PageProgram); //send write command
if((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)) //send highest 8-bit address
{
SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>24));
}
SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>16)); //send 24-bit address
SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>8));
SPI2_ReadWriteByte((uint8_t)WriteAddr);
for(i=0;i<NumByteToWrite;i++)SPI2_ReadWriteByte(pBuffer[i]); //write data
W25QXX_CS(1);
W25QXX_Wait_Busy();
}
//Write W25QXX w/o erase check and w/o byte number restriction
//pBuffer: data buffer
//WriteAddr: specific address
//NumByteToWrite: specific byte length (max 65535)
void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{
uint16_t remained_byte_num_in_page;
remained_byte_num_in_page=256-WriteAddr%256; //remained byte number in page
if( NumByteToWrite <= remained_byte_num_in_page ) remained_byte_num_in_page = NumByteToWrite; //data can be written in single page
while(1)
{
W25QXX_Write_Page(pBuffer,WriteAddr,remained_byte_num_in_page);
if(NumByteToWrite==remained_byte_num_in_page)break; //end write operation
else //NumByteToWrite>remained_byte_num_in_page
{
pBuffer+=remained_byte_num_in_page;
WriteAddr+=remained_byte_num_in_page;
NumByteToWrite-=remained_byte_num_in_page;
if(NumByteToWrite>256)remained_byte_num_in_page=256; //for whole page write
else remained_byte_num_in_page=NumByteToWrite; //for non-whole page write
}
};
}
//Write W25QXX w/ erase after check and w/o byte number restriction
//pBuffer: data buffer
//WriteAddr: specific address
//NumByteToWrite: specific byte length (max 65535)
uint8_t W25QXX_BUFFER[4096];
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{
uint32_t secpos;
uint16_t secoff;
uint16_t secremain;
uint16_t i;
uint8_t * W25QXX_BUF;
W25QXX_BUF=W25QXX_BUFFER;
secpos=WriteAddr/4096; //sector number (16 pages for 1 sector) for destination address
secoff=WriteAddr%4096; //offset address in sector for destination address
secremain=4096-secoff; //remained space for sector
if(NumByteToWrite<=secremain)secremain=NumByteToWrite; //data can be written in single sector
while(1)
{
W25QXX_Read(W25QXX_BUF,secpos*4096,4096); //read sector data for ease necessity judgment
for(i=0;i<secremain;i++) //check sector data status
{
if(W25QXX_BUF[secoff+i]!=0XFF) break; //ease necessary
}
if(i<secremain) //for ease
{
W25QXX_Erase_Sector(secpos); //ease sector
for(i=0;i<secremain;i++) //data copy
{
W25QXX_BUF[i+secoff]=pBuffer[i];
}
W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096); //write sector
}
else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain); //write data for sector unnecessary to erase
if(NumByteToWrite==secremain)break; //for operation end
else //for operation continuing
{
secpos++; //sector number + 1
secoff=0; //offset address from 0
pBuffer+=secremain; //pointer adjustment
WriteAddr+=secremain; //write address adjustment
NumByteToWrite-=secremain; //write number adjustment
if(NumByteToWrite>4096) secremain=4096; //not last sector
else secremain=NumByteToWrite; //last sector
}
};
}
//Erase whole chip, long waiting...
void W25QXX_Erase_Chip(void)
{
W25QXX_Write_Enable(); //write enable
W25QXX_Wait_Busy();
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_ChipErase); //send erase command
W25QXX_CS(1);
W25QXX_Wait_Busy(); //wait for erase complete
}
//Erase one sector
//Sector_Num: sector number
void W25QXX_Erase_Sector(uint32_t Sector_Num)
{
Sector_Num*=4096;
W25QXX_Write_Enable(); //write enable
W25QXX_Wait_Busy();
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_SectorErase); //send erase command
if((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)) //send highest 8-bit address
{
SPI2_ReadWriteByte((uint8_t)((Sector_Num)>>24));
}
SPI2_ReadWriteByte((uint8_t)((Sector_Num)>>16)); //send 24-bit address
SPI2_ReadWriteByte((uint8_t)((Sector_Num)>>8));
SPI2_ReadWriteByte((uint8_t)Sector_Num);
W25QXX_CS(1);
W25QXX_Wait_Busy(); //wait for erase complete
}
//Wait idle status before next operation
void W25QXX_Wait_Busy(void)
{
while((W25QXX_ReadSR(1)&0x01)==0x01); //wait for busy flag cleared
}
//Enter power-down mode
#define tDP_us 3
void W25QXX_PowerDown(void)
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_PowerDown); //send power-down command
W25QXX_CS(1);
PY_Delay_us_t(tDP_us); //tDP
}
//Wake-up
#define tRES1_us 3
void W25QXX_WAKEUP(void)
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_ReleasePowerDown);//send release power-down command
W25QXX_CS(1);
PY_Delay_us_t(tRES1_us); //tRES1
}
main.c文件操作代码里实现串口接收1个字节的指令,实现FLASH的ID读取,一页的写入,一页的读出三个功能。其它功能可以根据需要自行增加。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
//Written by Pegasus Yu in 2023
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
#include "W25QXX.h"
#include <string.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_us_t(1000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t msNum = Delay/1000;
__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi2;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
uint8_t uart1_rx[16];
uint8_t cmd;
uint32_t Flash_Access_Addr = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void PeriphCommonClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_SPI2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
#define page_byte_size 256
uint8_t sdbuffer[page_byte_size];
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* Configure the peripherals common clocks */
PeriphCommonClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_SPI2_Init();
/* USER CODE BEGIN 2 */
PY_usDelayTest();
PY_usDelayOptimize();
HAL_UART_Receive_IT(&huart1, uart1_rx, 1);
W25QXX_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(cmd==1) //Read ID
{
cmd = 0;
printf("FLASH ID=0x%x\r\n\r\n", W25QXX_ReadID());
printf("W25Q80_ID: 0XEF13\r\n");
printf("W25Q16_ID: 0XEF14\r\n");
printf("W25Q32_ID: 0XEF15\r\n");
printf("W25Q64_ID: 0XEF16\r\n");
printf("W25Q128_ID: 0XEF17\r\n");
printf("W25Q256_ID: 0XEF18\r\n");
printf("W25Q512_ID: 0XEF18\r\n");
printf("W25Q1024_ID: 0XEF20\r\n");
}
if(cmd==2) //Write one page
{
cmd = 0;
for(uint32_t i=0;i<page_byte_size;i++)
{
sdbuffer[i]=i;
}
Flash_Access_Addr = 0;
W25QXX_Write(sdbuffer, Flash_Access_Addr, page_byte_size);
printf("Write to W25Q6XX done!\r\n");
}
if(cmd==3)//Read one page
{
cmd = 0;
memset(sdbuffer, 0, page_byte_size);
printf("Start to read W25QXX......\r\n");
Flash_Access_Addr = 0;
W25QXX_Read(sdbuffer, Flash_Access_Addr, page_byte_size);
for(uint32_t i=0; i<page_byte_size; i++)
{
printf("%d ", sdbuffer[i]);
}
printf("\r\n");
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
__HAL_RCC_SYSCFG_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_DIV1;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 60;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_3;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief Peripherals Common Clock Configuration
* @retval None
*/
void PeriphCommonClock_Config(void)
{
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
/** Initializes the peripherals clock
*/
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_CKPER;
PeriphClkInitStruct.CkperClockSelection = RCC_CLKPSOURCE_HSI;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief SPI2 Initialization Function
* @param None
* @retval None
*/
static void MX_SPI2_Init(void)
{
/* USER CODE BEGIN SPI2_Init 0 */
/* USER CODE END SPI2_Init 0 */
/* USER CODE BEGIN SPI2_Init 1 */
/* USER CODE END SPI2_Init 1 */
/* SPI2 parameter configuration*/
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 0x0;
hspi2.Init.NSSPMode = SPI_NSS_PULSE_ENABLE;
hspi2.Init.NSSPolarity = SPI_NSS_POLARITY_LOW;
hspi2.Init.FifoThreshold = SPI_FIFO_THRESHOLD_01DATA;
hspi2.Init.TxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;
hspi2.Init.RxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;
hspi2.Init.MasterSSIdleness = SPI_MASTER_SS_IDLENESS_00CYCLE;
hspi2.Init.MasterInterDataIdleness = SPI_MASTER_INTERDATA_IDLENESS_00CYCLE;
hspi2.Init.MasterReceiverAutoSusp = SPI_MASTER_RX_AUTOSUSP_DISABLE;
hspi2.Init.MasterKeepIOState = SPI_MASTER_KEEP_IO_STATE_DISABLE;
hspi2.Init.IOSwap = SPI_IO_SWAP_DISABLE;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI2_Init 2 */
/* USER CODE END SPI2_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);
/*Configure GPIO pin : PB12 */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart==&huart1)
{
cmd = uart1_rx[0];
HAL_UART_Receive_IT(&huart1, uart1_rx, 1);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
STM32例程测试
串口指令0x01测试效果如下:
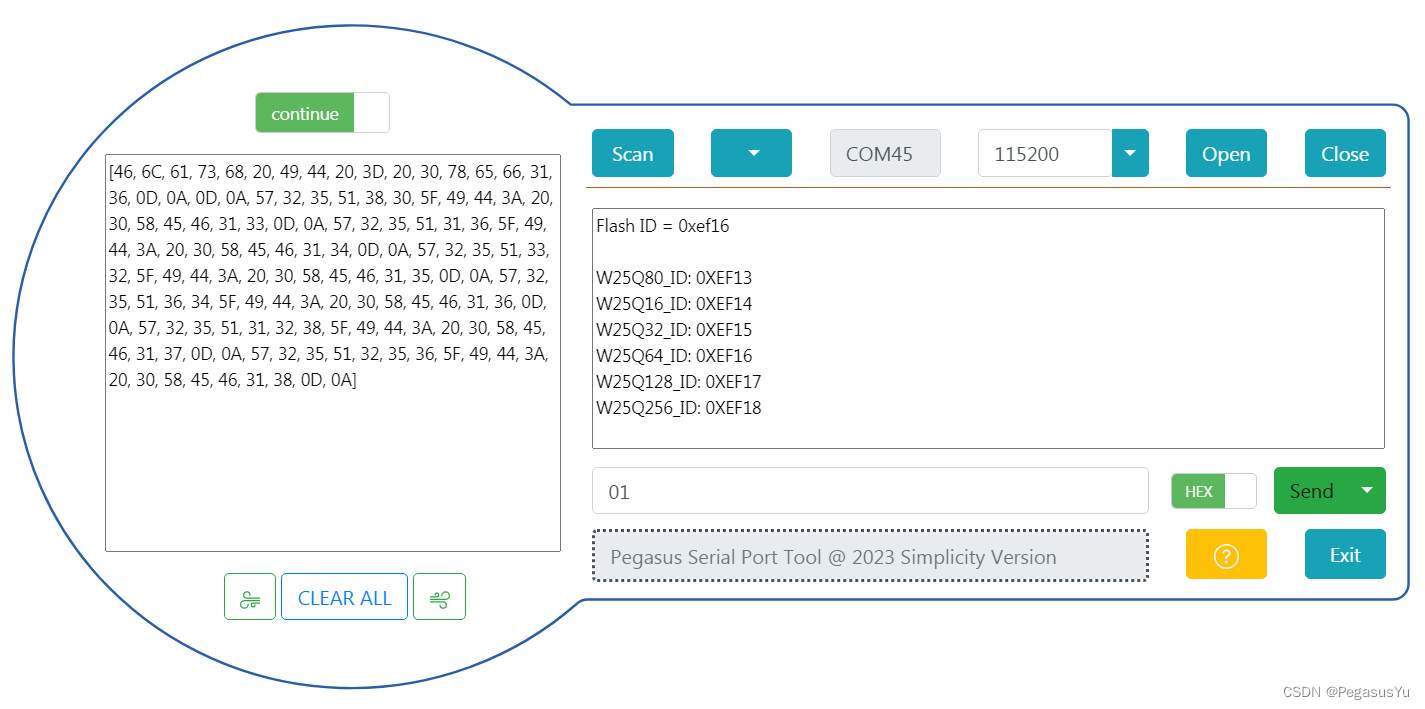
串口指令0x02测试效果如下:
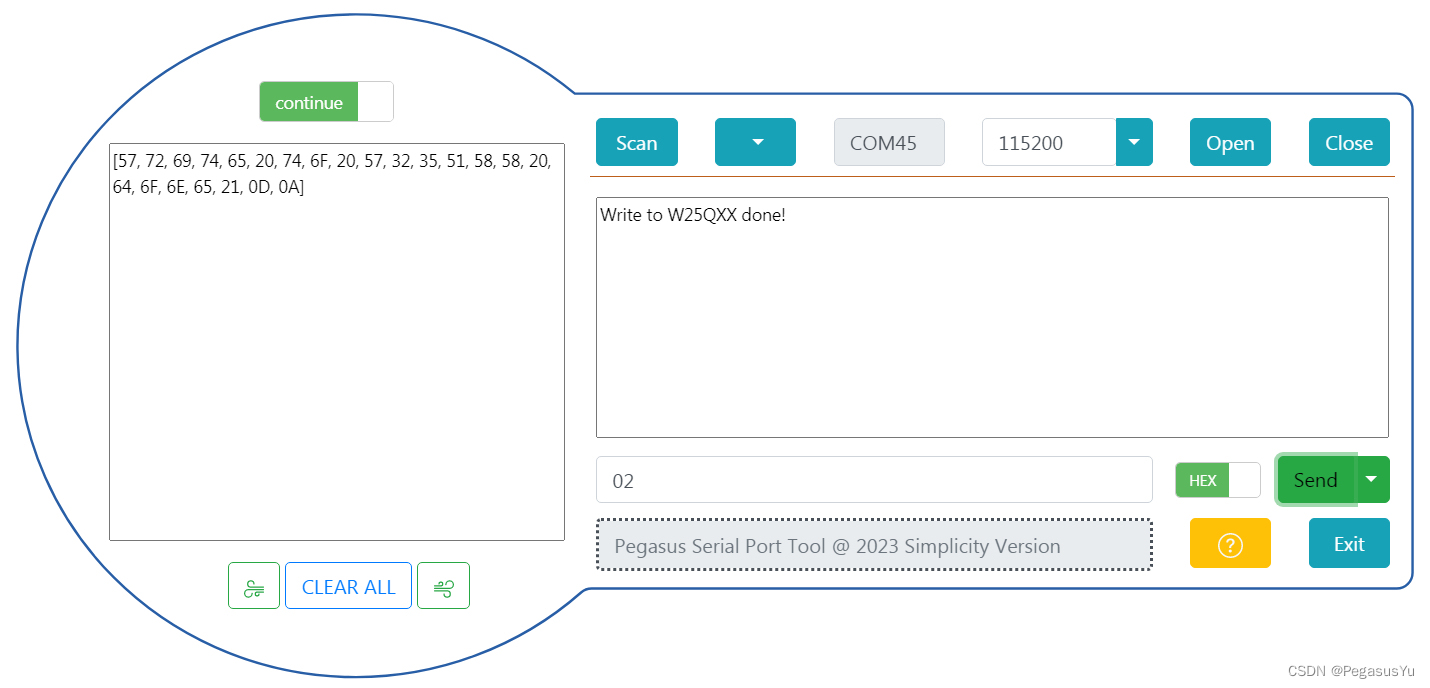
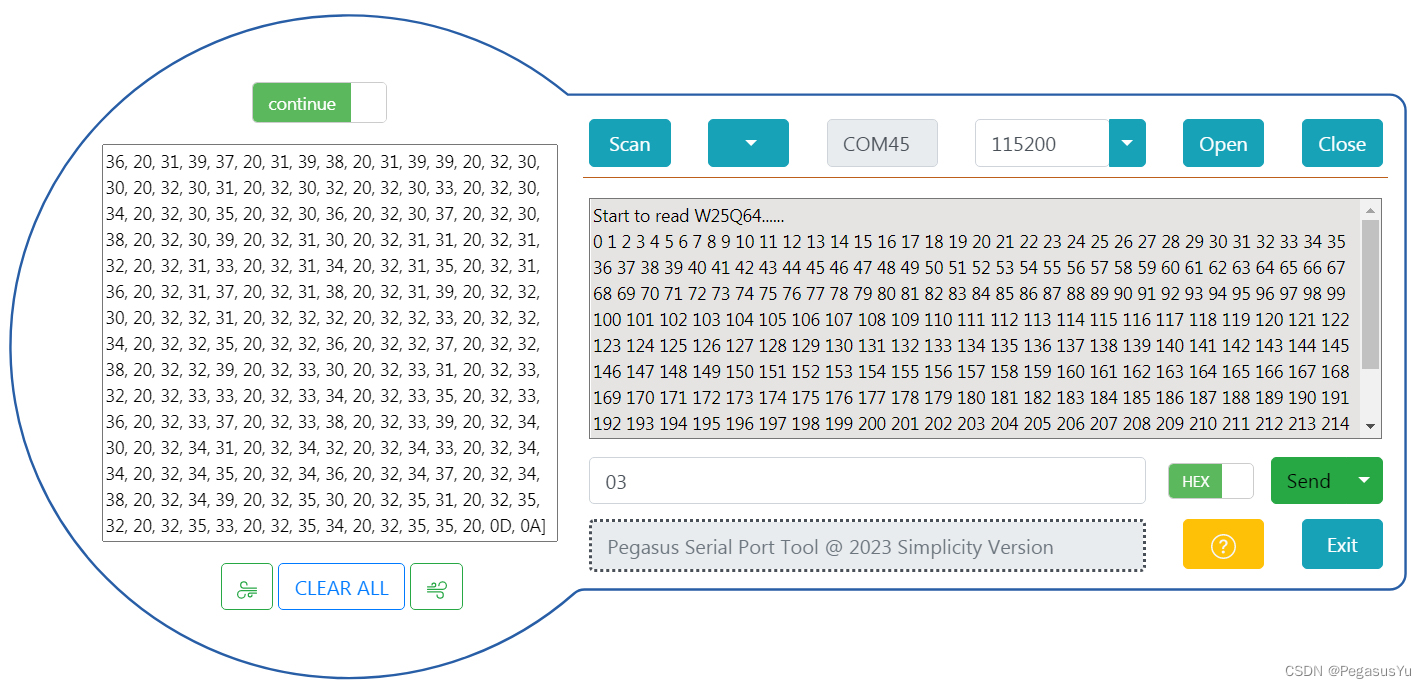
串口指令0x03测试效果如下:
STM32例程下载
STM32H750VBT6读写W25QXX例程下载
–End–