文章目录
- 术语
- 系统状态转换及信息提示
- 系统非激活状态
- 停车位搜索状态
- 泊车辅助状态
- 系统退出条件
- 系统故障响应
- 性能要求
- 避撞要求
- 挡位调整次数要求
- 平行停车位(空间车位)结束位置
- 垂直停车位(空间车位)结束位置
- 平行停车位(线车位)结束位置
- 垂直停车位(线车位)结束位置
- 试验判据
- 空间车位
- 线车位
- 试验方法
- 试验环境要求
- 试验项目
- 空间车位试验方法
- 线车位试验方法
- 停车位布置要求
- 平行停车位(空间车位)布置
- 垂直停车位(空间车位)布置
- 平行停车位(线车位)布置
- 扩展平行停车位(线车位)布置
- 垂直停车位(线车位)布置
- 扩展垂直停车位(线车位)布置
术语
1. 智能泊车辅助系统 —— 在车辆泊车时,自动检测泊车空间并为驾驶员提供泊车指示和方向控制等辅助功能的系统。
2. 停车位搜索状态 —— 智能泊车辅助系统进行搜索停车位的工作状态。
3. 车辆侧边缘线 —— 车轮不发生偏转时,车辆左侧或右侧前轮胎外边缘接地点与同侧后轮胎外边缘接地点的连线。
4. 挡位调整次数 —— 试验车辆在泊车过程中,挡位首次切换至R挡且车辆开始运动记为第一次挡位调整,之后,R挡切换至D挡或者D挡切换至R挡分别计为一次挡位调整。
系统状态转换及信息提示
系统非激活状态
系统非激活状态包括关闭状态和待机状态。在该状态时,系统不应对车辆进行控制。
停车位搜索状态
1. 系统应通过以下至少一种方式由非激活状态切换至搜索停车位的工作状态:
1.1. 主动激活 —— 驾驶员主动激活停车位搜索模式
1.2. 自动激活 —— 当车辆速度到达一定的阈值时,自动进入停车位搜索模式
2. 系统应具备搜索从停车位的能力并能搜索以下至少一类停车位:
2.1. 由边界车辆围成的停车位(空间车位)
2.2. 有停车位边界围成的停车位(线车位)
3. 系统应通过驾驶员主动确认或自动显示的方式提示停车位信息。
泊车辅助状态
1. 系统进入泊车辅助状态的初始条件应为车辆静止;当驾驶员主动确认停车位位置后系统应切换至泊车辅助状态。
2. 系统应具备以下至少一种控制模式辅助驾驶员将车辆泊入停车位:
2.1. 横向控制模式 —— 系统控制车辆横向运动,驾驶员控制车辆纵向运动;
2.2. 横纵向组合控制模式 —— 系统控制车辆横向与纵向运动。
3. 泊车辅助状态时,系统应发出状态及操作信息提示并设置最大运行速度且不大于10km/h,当车速超过最大行驶速度时,系统应向驾驶员发出提示信息,并退出泊车辅助状态。
4. 系统完成泊车辅助控制后,应向驾驶员发出提示信息,并退出至非激活状态。
系统退出条件
在泊车辅助状态时,系统应具备通过驾驶员主动方式随时接管车辆控制权并退出至非激活状态的功能,并在系统说明书中说明驾驶员主动退出条件。退出条件可包含但不限于以下方式:
1. 操纵方向盘
2. 操纵制动踏板
3. 操纵挡位
4. 操纵驻车制动
系统故障响应
系统自检及运行期间若发生故障,系统应至少以光学方式提示驾驶员故障信息,可退出至非激活状态。
性能要求
避撞要求
对于仅具备横向控制能力的泊车辅助系统,泊车过程中系统应向驾驶员提供纵向控制指令,在发出指令前车辆不应与边界车辆及障碍物发生碰撞;对于具备横纵向控制功能的泊车辅助系统,泊车过程中不应与边界车辆及障碍物发生碰撞。
挡位调整次数要求
系统泊入平行停车位过程最大挡位调整次数应不大于8次,泊入垂直停车位过程最大挡位调整次数应不大于7次。
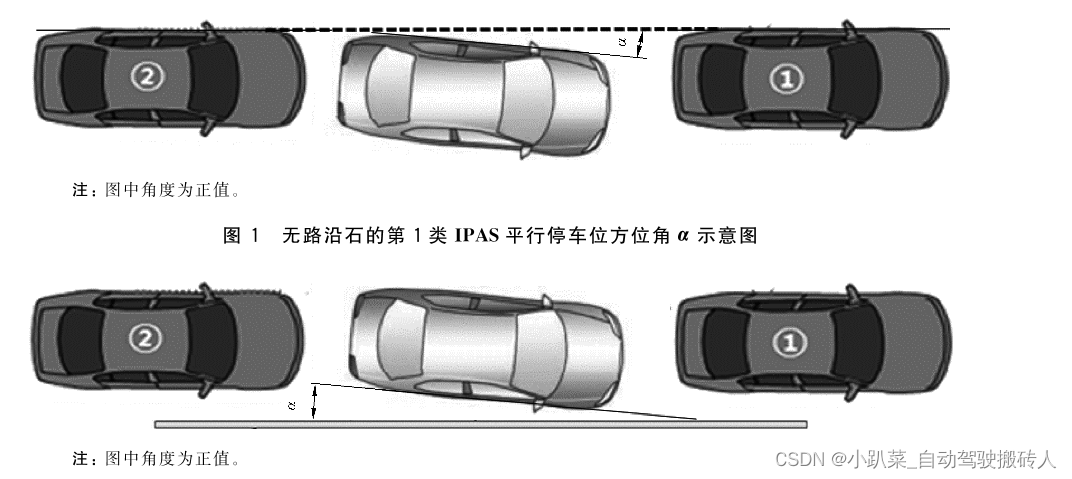
平行停车位(空间车位)结束位置
当系统提示泊车辅助结束时,试验车辆位置应满足以下位置要求:
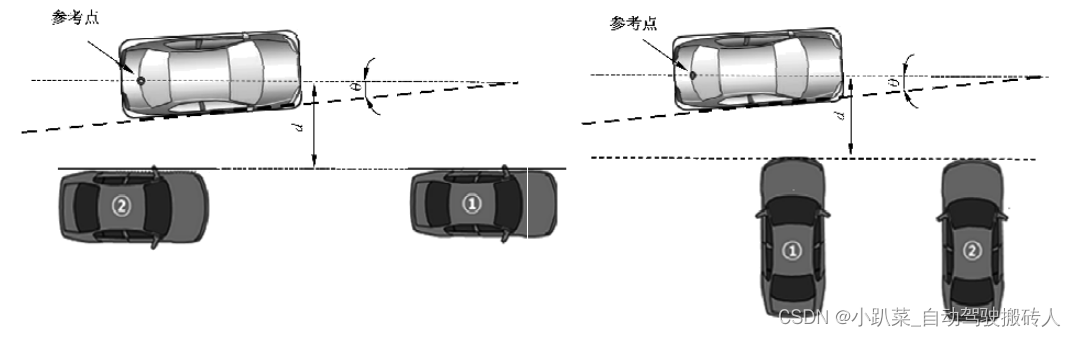
1. 角度要求 —— 无路沿石时,边界车辆侧边缘线与试验车辆侧边缘线的夹角α绝对值应不大于3°;有路沿石时,路沿石与试验车辆侧边缘线的夹角α绝对值应不大于3°。如下图所示。
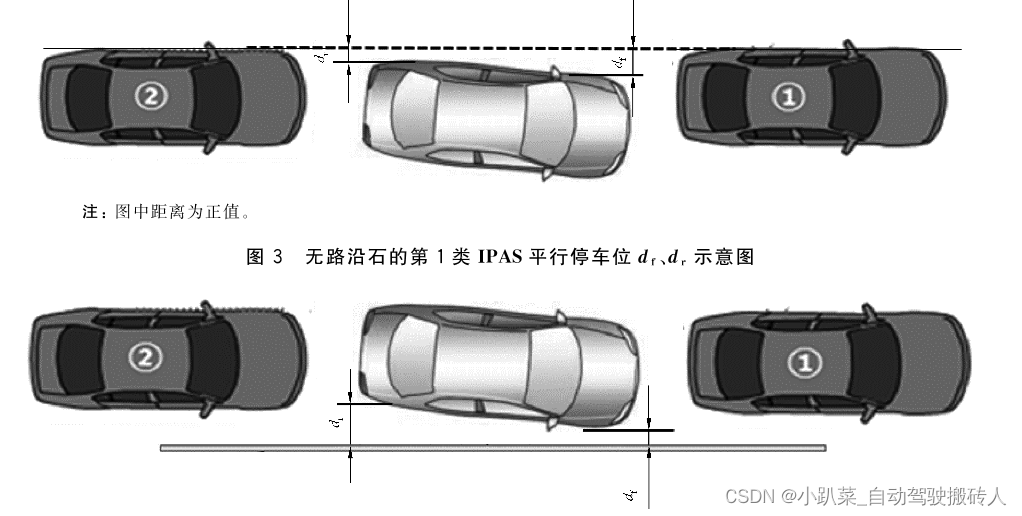
2. 与参考线之间的距离 —— 无路沿石时,试验车辆前后轮胎外边缘接地点到边界车辆侧边缘线的最小距离df与dr绝对值应不大于0.15m之间;有路沿石时,试验车辆前后轮胎外边缘接地点到路沿石的最小距离df与dr应在0.05m~0.35m之间。如图所示。
垂直停车位(空间车位)结束位置
当系统提示泊车辅助结束时,试验车辆两侧与边界车辆最小距离(不包含后视镜)不应小于0.3m。试验车辆最前端点与边界车辆最前端连线的距离d绝对值应不大于0.4m,试验车辆侧边缘线与边界车辆侧边缘线的夹角β绝对值应不大于3°的范围内。如图所示。

平行停车位(线车位)结束位置
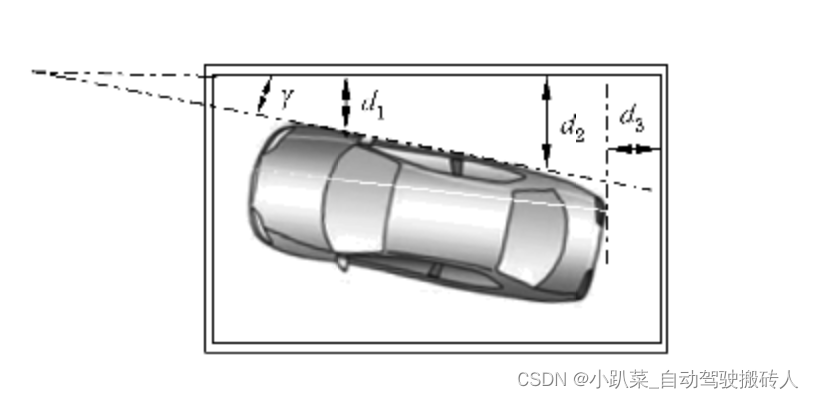
当系统提示泊车辅助结束时,试验车辆侧边缘线与停车位边界线的夹角γ、前车轮轮胎外边缘接地点到停车位边界线内边缘的最短距离d1、后车轮轮胎外边缘接地点到停车位边界线内边缘的最短距离d2、车身最后端和最前端与停车位边界线内边缘的最短距离较小值d3应满足如下要求:
1. -3°≤γ≤3°
2. d1>0m
3. d2>0m
4. d3>0m
垂直停车位(线车位)结束位置
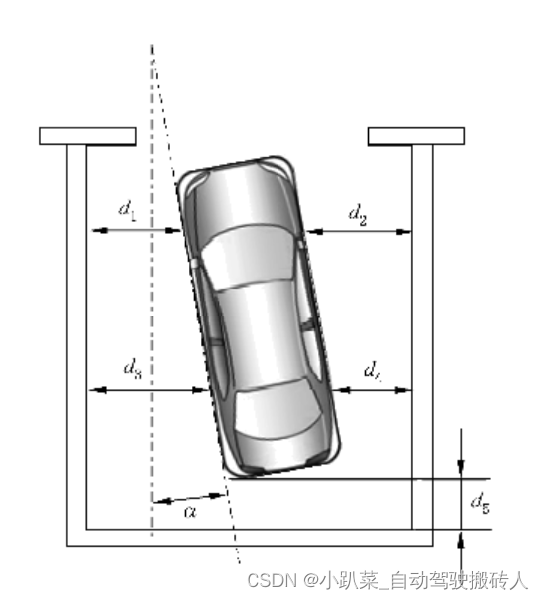
当系统提示泊车辅助结束时,试验车辆侧边缘线与停车位边界线的夹角α、左前轮外边缘接地点距离停车位边界线内边缘的最短横向距离d1、右前轮外边缘接地点距离停车位边界线内边缘的最短横向距离d2、左后轮外边缘接地点距离停车位边界线内边缘的最短横向距离d3、右后轮外边缘接地点距离停车位边界线内边缘的最短横向距离d4、车身最后端距停车位边界线内边缘的最短距离和车身最前端距停车位边界线内边缘的最短距离较小值d5应满足以下要求:
1. -3°≤α≤3°
2. d1>0m
3. d2>0m
4. d3>0m
5. d4>0m
6. d5>0m
试验判据
空间车位
下方定义的6组试验项目应各重复进行3次且至少2次满足上述空间停车位置要求。若任一组试验过程中发生碰撞,则判断试验失败。
线车位
下方定义的6组试验项目应各重复进行3次且至少2次满足上述线停车位置要求。若任一组试验过程中发生碰撞,则判断试验失败。
试验方法
试验环境要求
试验环境应满足以下要求:
1. 风速不超过7.9m/s,相对湿度小于95%,且无雨雪雾等情况;
2. 试验路面为水平(坡度应小于1%)、平整、干燥、具有良好附着能力的混凝土或沥青路面;
3. 目标停车位的环境照度不小于100lux;
4. 不存在影响传感器工作的干扰物;
5. 针对线车位还需额外满足停车位的边界线无破损,清晰可见。
试验项目
空间车位试验方法
泊车辅助系统激活状态下,根据下表完成6组不同横向距离和停车位布置试验项目。试验车辆以10km/h车速驶向车位,车速偏差±2km/h,行驶路径为直行,试验车辆横向距离偏差绝对值应不大于0.2m,角度偏差绝对值应不大于3°,其中横向距离是试验车辆后轴中间点到边界车辆侧边缘线的最小距离,如下图所示。
| 分段组合测试试验项目 | |||
|---|---|---|---|
| 试验组序号 | 横向距离 | 停车位类型 | 路沿石 |
| 1 | 0.5*车宽+0.8m | 水平 | 无 |
| 2 | 0.5*车宽+1.3m | 水平 | 无 |
| 3 | 0.5*车宽+0.8m | 水平 | 有 |
| 4 | 0.5*车宽+1.3m | 水平 | 有 |
| 5 | 0.5*车宽+0.8m | 垂直 | 无 |
| 6 | 0.5*车宽+1.3m | 垂直 | 无 |
线车位试验方法
开启泊车辅助系统,根据下表完成8组不同横向距离和停车位布置试验项目。试验车辆以10km/h车速驶向车位,车速偏差±2km/h,行驶路径为直行,试验车辆横向距离偏差绝对值应不大于0.2m,角度偏差绝对值应不大于3°,其中横向距离是试验车辆后轴中间点到边界车辆侧边缘线的最小距离,如下图所示。

| 分段组合测试试验项目 | ||
|---|---|---|
| 试验组序号 | 横向距离 | 停车位类型 |
| 1 | 0.5*车宽+0.8m | 平行 |
| 2 | 0.5*车宽+1.3m | 平行 |
| 3 | 0.5*车宽+0.8m | 扩展平行 |
| 4 | 0.5*车宽+1.3m | 扩展平行 |
| 5 | 0.5*车宽+0.8m | 垂直 |
| 6 | 0.5*车宽+1.3m | 垂直 |
| 7 | 0.5*车宽+0.8m | 扩展垂直 |
| 8 | 0.5*车宽+1.3m | 扩展垂直 |
停车位布置要求
平行停车位(空间车位)布置
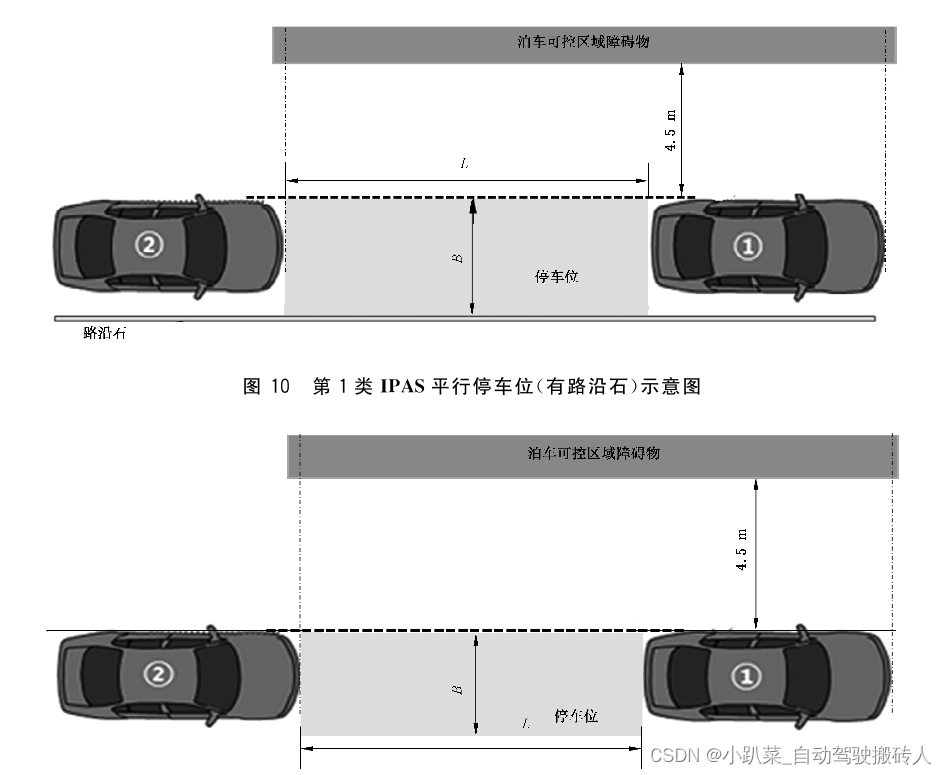
平行停车位(空间车位)布置应满足以下要求:
1. 由两边界车辆组成且试验车辆宽度差值在0.15m以内;
2. 边界车辆靠近路侧边缘线在同一条直线;
3. 若停车位包含路沿石,边界车辆侧边缘线与路沿石平行,且路沿石高于地面高度应不小于0.15m,路沿石中心线与地面夹角为90°;
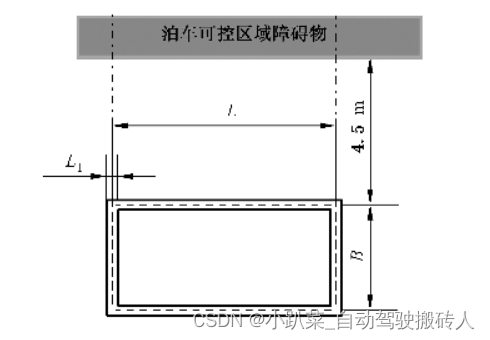
4. 在停车位路侧端距离边界车辆侧边缘线4.5m处设置平行于边界车辆侧边缘线且高度不小于1.5m的泊车可控区域障碍物,障碍物至少覆盖前方边界车辆最前端至后方边界车辆最前端区域;
5. 停车位长度L与停车位宽度B满足以下要求:
5.1 对于车长不大于4m的试验车辆,L为试验车辆长度+1m;
5.2 对于车长大于4m的试验车辆,L为试验车辆长度*1.25;
5.3 B为试验车辆宽度+0.2m
垂直停车位(空间车位)布置
垂直停车位(空间车位)布置应满足以下要求:
1. 由两边界车辆组成且试验车辆长度差值在0.3m以内;
2. 边界车辆平行拜访且前段平齐;
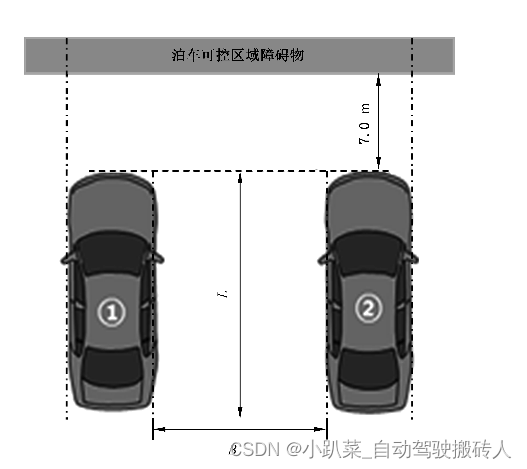
3. 距离边界车辆最前端7m处设置垂直于边界车辆侧边缘线且高度不小于1.5m的泊车可控区域障碍物,障碍物至少覆盖边界车辆及停车位区域;
4. 停车位长度L与停车位宽度B满足以下要求:
5.1 L为试验车辆长度;
5.2 B为试验车辆宽度+1.2m
平行停车位(线车位)布置
平行停车位(线车位)布置应满足以下要求:
1. 停车位几何形状和尺寸应符合GB 5768.3要求;
2. 停车位边界线宽度L1为0.1m;
3. 以车位线中心线为基准,停车位宽度B为2.5m,停车位长度L为6.0m和试验车辆长度+1.0m的较大值;
4. 在距离停车位路侧端变现中心线4.5m处设置平行于停车位路侧端边线且高度不小于1.5m的泊车可控区域障碍物,障碍物至少覆盖停车位区域。
扩展平行停车位(线车位)布置
扩展平行停车位(线车位)布置应满足以下要求:
1. 停车位几何形状和尺寸应符合GB 5768.3要求;
2. 停车位边界线宽度L1为0.1m,短线L2、L3、L4长度为0.6m;
3. 以车位线中心线为基准,停车位宽度B为2.5m,停车位长度L为6.0m和试验车辆长度+1.0m的较大值;
4. 在距离停车位路侧端变现中心线4.5m处设置平行于停车位路侧端边线且高度不小于1.5m的泊车可控区域障碍物,障碍物至少覆盖停车位区域。
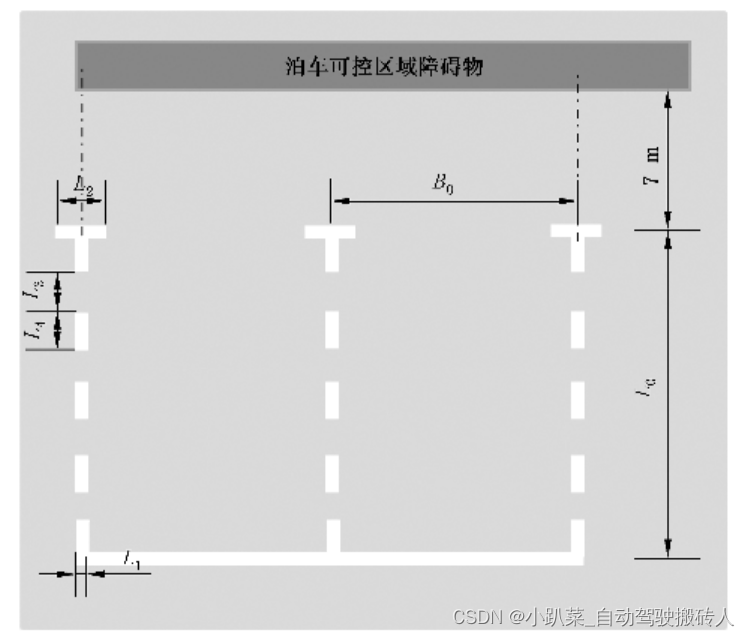
垂直停车位(线车位)布置
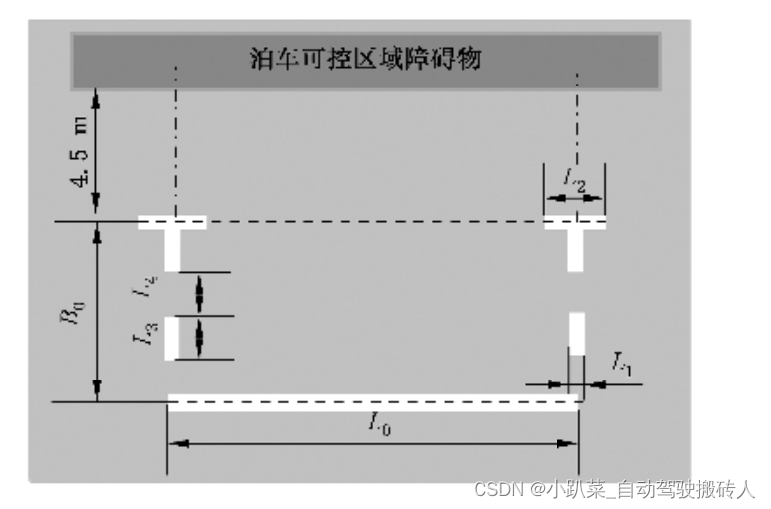
垂直停车位(线车位)布置应满足以下要求:
1. 停车位几何形状和尺寸应符合GB 5768.3要求;
2. 停车位边界线宽度L1为0.1m,短线L2、L3、L4长度为0.6m;
3. 以车位线中心线为基准,停车位宽度B为2.5m和车辆宽度+0.6m的较大值,停车位长度L为6.0m;
4. 在距离停车位路侧端变现中心线7.0m处设置平行于停车位路侧端边线且高度不小于1.5m的泊车可控区域障碍物,障碍物至少覆盖停车位区域。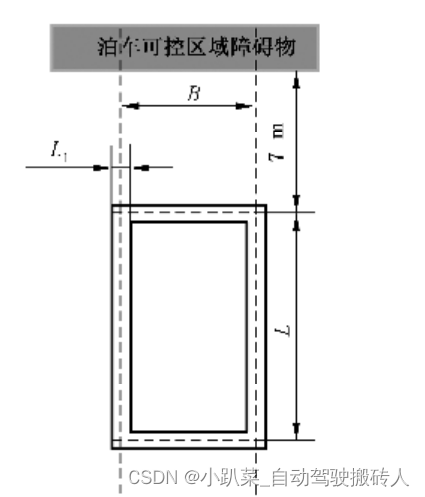
扩展垂直停车位(线车位)布置
平行停车位(线车位)布置应满足以下要求:
1. 停车位几何形状和尺寸应符合GB 5768.3要求;
2. 停车位边界线宽度L1为0.1m;
3. 以车位线中心线为基准,停车位宽度B为2.5m和车辆宽度+0.6m的较大值,停车位长度L为6.0m;
4. 在距离停车位路侧端变现中心线7.0m处设置平行于停车位路侧端边线且高度不小于1.5m的泊车可控区域障碍物,障碍物至少覆盖停车位区域。








![[机缘参悟-116] :世间的四张大网以及新型的第五张网,以及在网中流动的内容](https://img-blog.csdnimg.cn/4aa377cc426146559a9554631f3b01fd.png)