目录
概述
一、开发环境
二、STM32CubeMx配置
三、编码
四、运行结果
五、代码解释
六、总结
概述
timeslice是一个时间片轮询框架,完全解耦的时间片轮询框架,非常适合裸机单片机引用。接下来将该框架移植到stm32单片机运行,单片机只需用1个定时器作为时钟即可。
一、开发环境
1、硬件平台
STM32F401CEU6
内部Flash : 512Kbytes,SARM : 96 Kbytes
二、STM32CubeMx配置
2.1、系统时钟配置

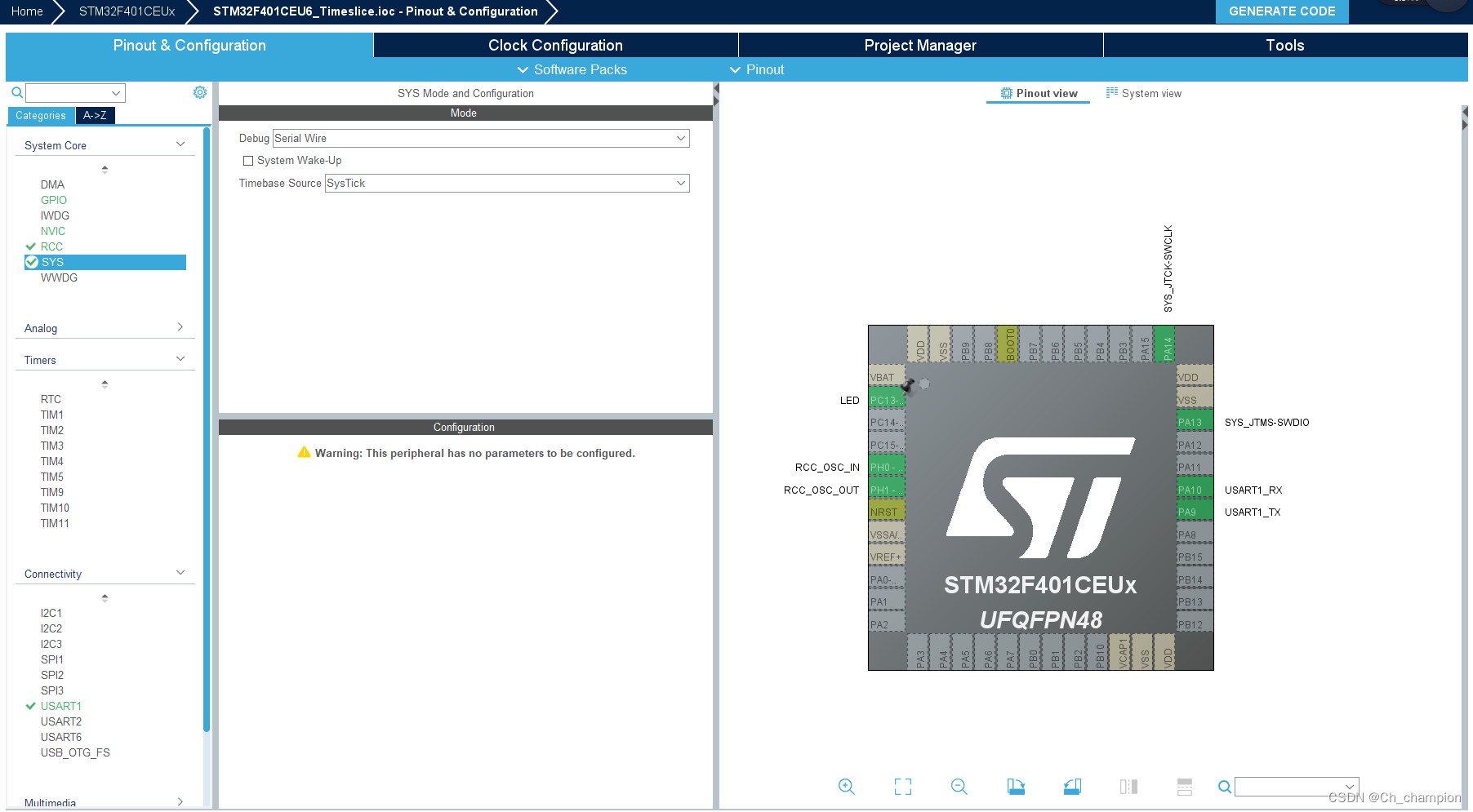
2.2、下载调试配置
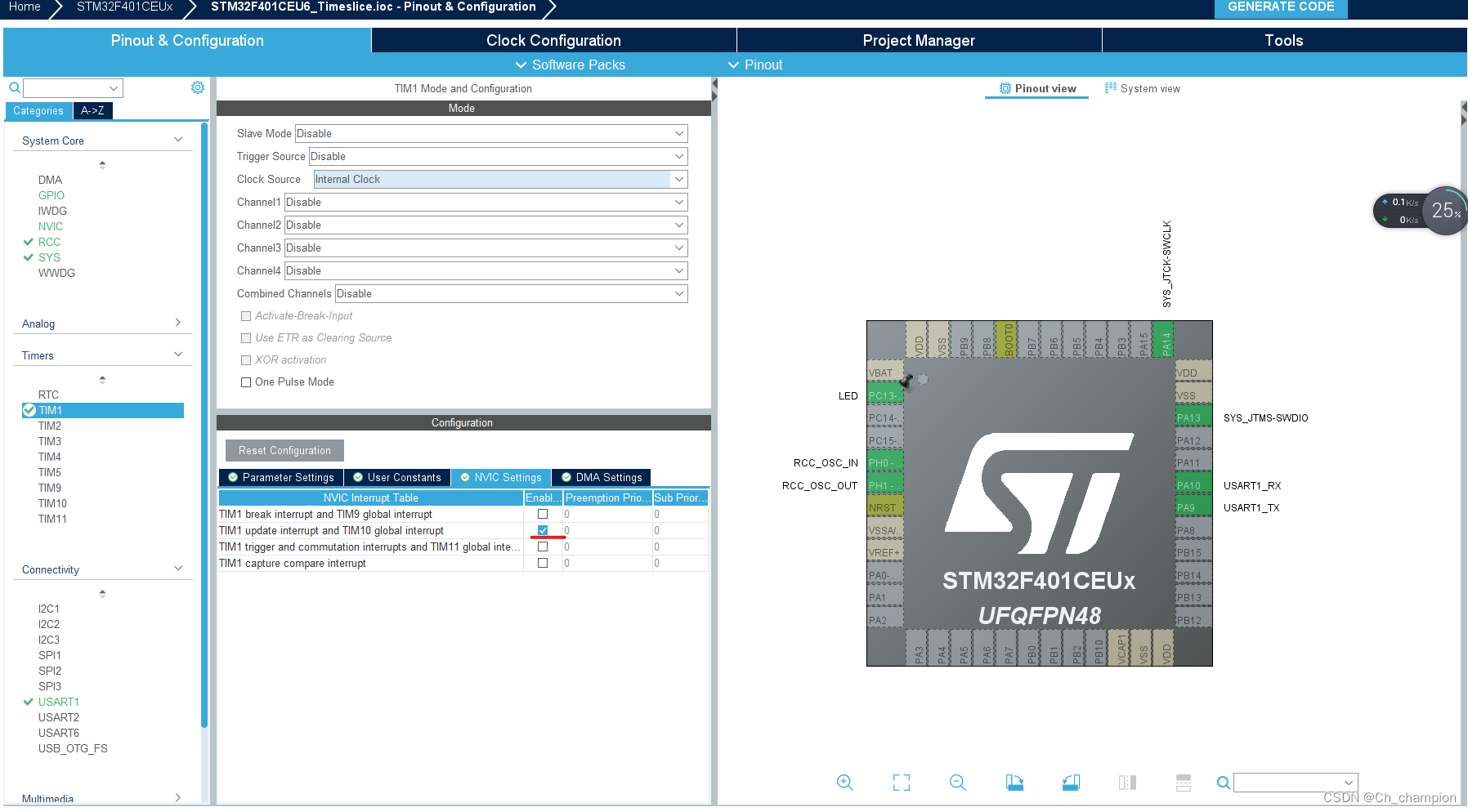
2.3、TIM配置(1ms中断)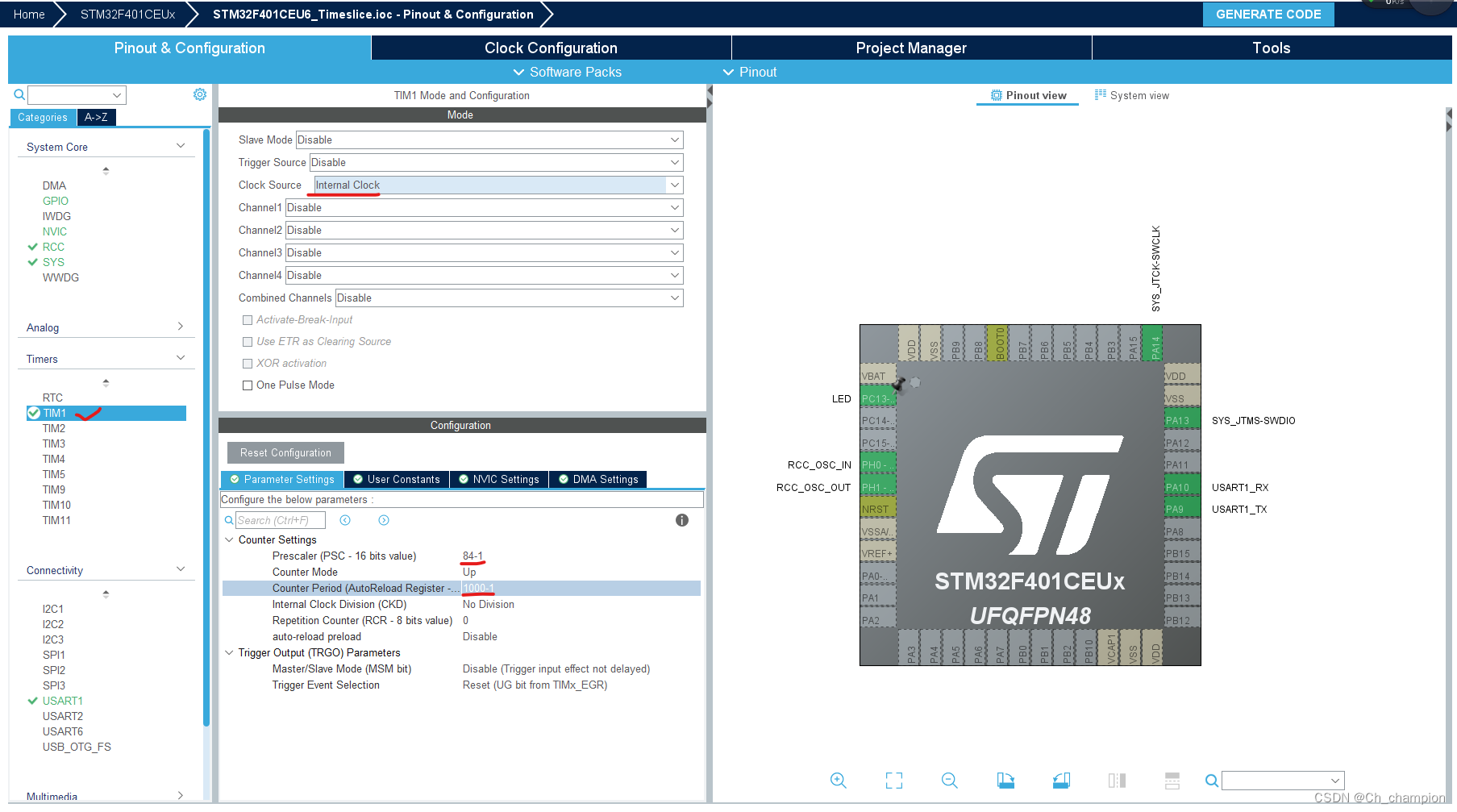
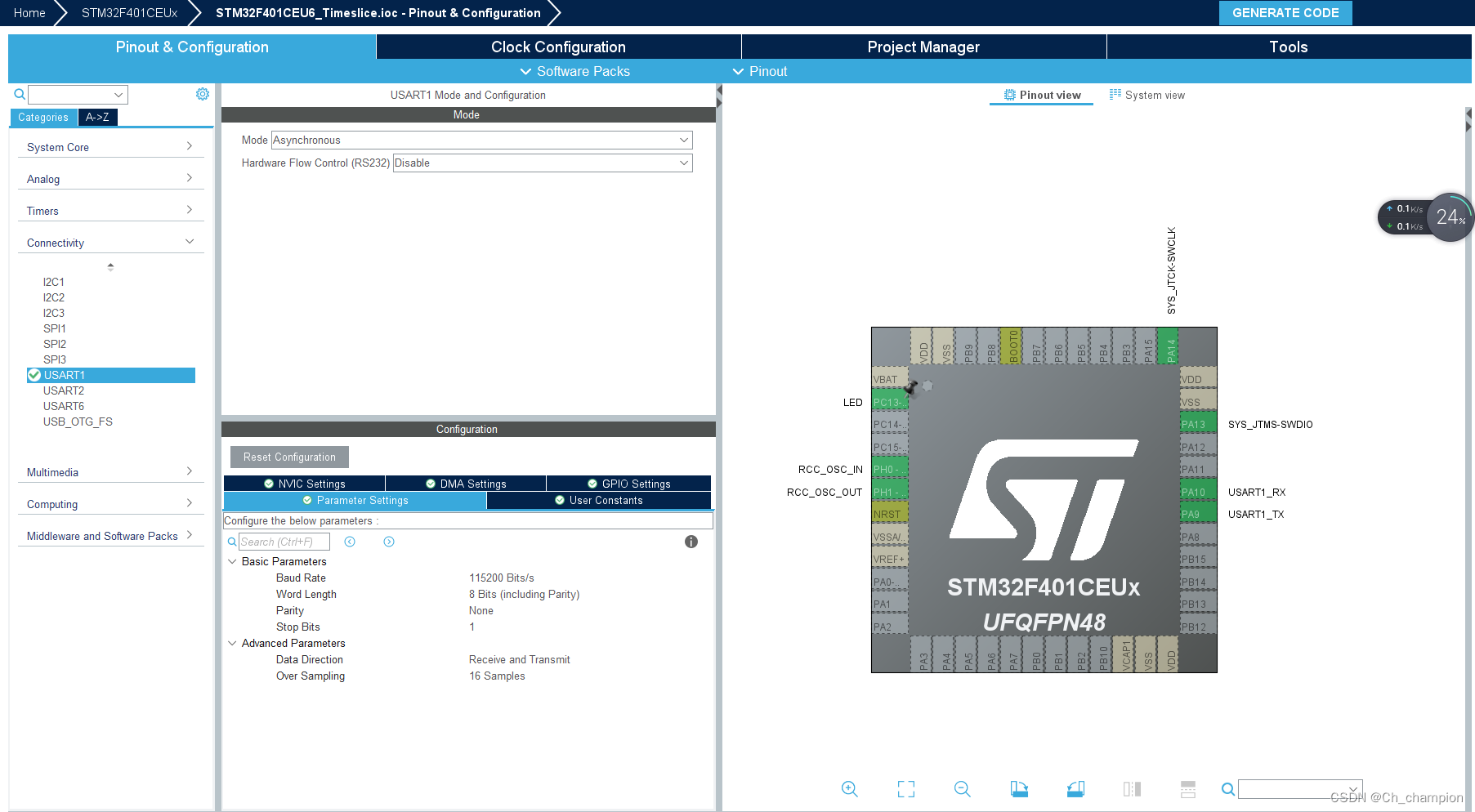
2.4、usart1配置
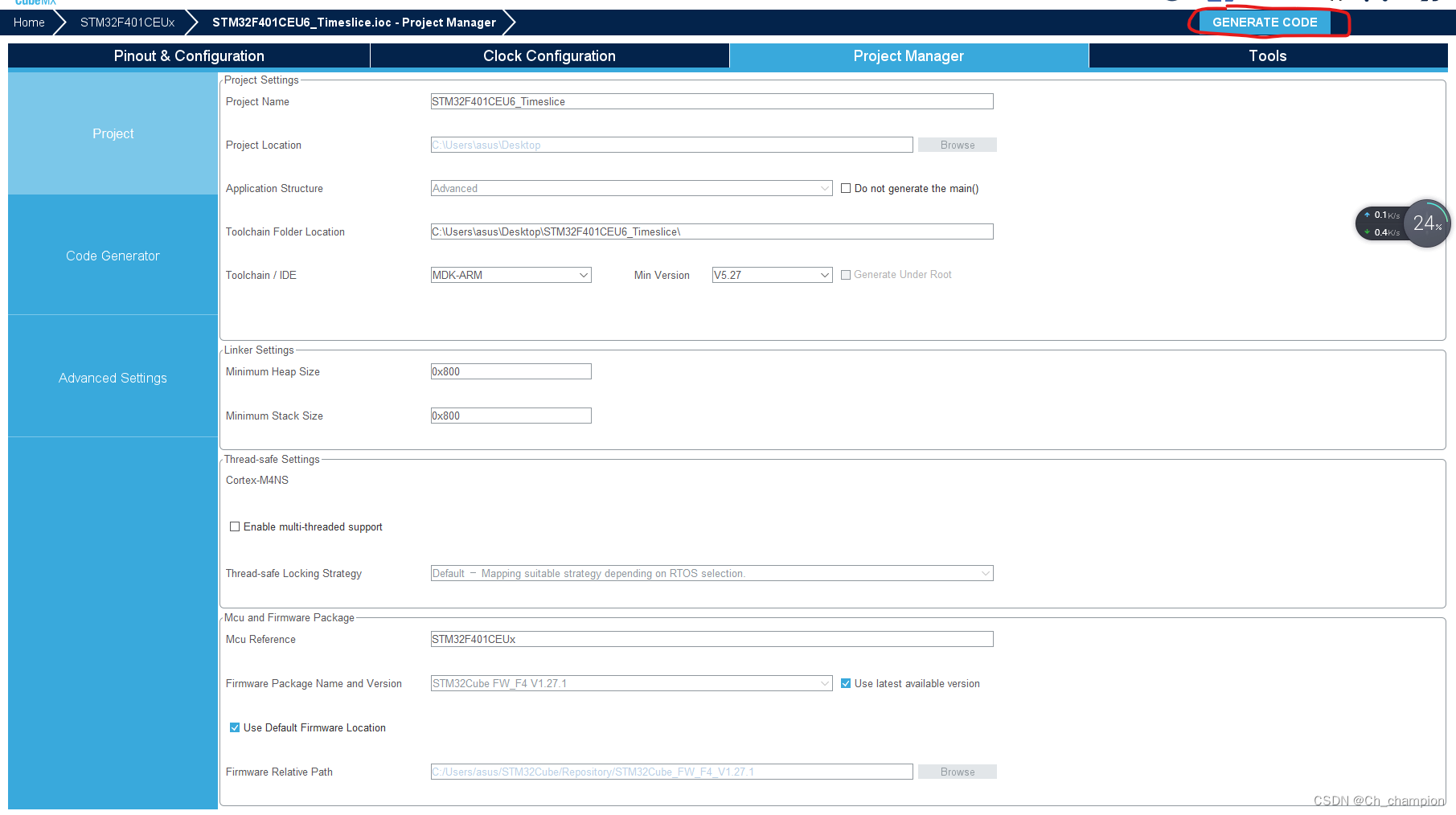
2.5、生成代码
2.6、编译工程
三、编码
1、usart.c添加打印
/* USER CODE BEGIN 1 */
#include "stdio.h"
#ifdef __GNUC__
/* With GCC/RAISONANCE, small printf (option LD Linker->Libraries->Small printf
set to 'Yes') calls __io_putchar() */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif /* __GNUC__ */
/**
* @brief Retargets the C library printf function to the USART.
* @param None
* @retval None
*/
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the EVAL_COM1 and Loop until the end of transmission */
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
int fgetc(FILE * f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/* USER CODE END 1 */2、tim1.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file tim.c
* @brief This file provides code for the configuration
* of the TIM instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim1;
/* TIM1 init function */
void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 84-1;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 1000-1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspInit 0 */
/* USER CODE END TIM1_MspInit 0 */
/* TIM1 clock enable */
__HAL_RCC_TIM1_CLK_ENABLE();
/* TIM1 interrupt Init */
HAL_NVIC_SetPriority(TIM1_UP_TIM10_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM1_UP_TIM10_IRQn);
/* USER CODE BEGIN TIM1_MspInit 1 */
/* USER CODE END TIM1_MspInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspDeInit 0 */
/* USER CODE END TIM1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM1_CLK_DISABLE();
/* TIM1 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM1_UP_TIM10_IRQn);
/* USER CODE BEGIN TIM1_MspDeInit 1 */
/* USER CODE END TIM1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
#include "stdio.h"
int timeCount = 0;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if(htim->Instance == TIM1){
timeCount++;
if(timeCount==1000){
timeCount = 0;
printf("time + 1s\n");
}
}
}
/* USER CODE END 1 */
3、在根目录创建timeslice文件夹,分别有list.c、list.h、thread_demo.c、thread_demo.h、timeslice.c、timeslice.h文件组成
1)、list.c
#include "list.h"
void list_init(ListObj* list)
{
list->next = list->prev = list;
}
void list_insert_after(ListObj* list, ListObj* node)
{
list->next->prev = node;
node->next = list->next;
list->next = node;
node->prev = list;
}
void list_insert_before(ListObj* list, ListObj* node)
{
list->prev->next = node;
node->prev = list->prev;
list->prev = node;
node->next = list;
}
void list_remove(ListObj* node)
{
node->next->prev = node->prev;
node->prev->next = node->next;
node->next = node->prev = node;
}
int list_isempty(const ListObj* list)
{
return list->next == list;
}
unsigned int list_len(const ListObj* list)
{
unsigned int len = 0;
const ListObj* p = list;
while (p->next != list)
{
p = p->next;
len++;
}
return len;
}
2)、list.h
#ifndef _LIST_H
#define _LIST_H
#define offset_of(type, member) (unsigned long) &((type*)0)->member
#define container_of(ptr, type, member) ((type *)((char *)(ptr) - offset_of(type, member)))
typedef struct list_structure
{
struct list_structure* next;
struct list_structure* prev;
} ListObj;
#define LIST_HEAD_INIT(name) {&(name), &(name)}
#define LIST_HEAD(name) ListObj name = LIST_HEAD_INIT(name)
void list_init(ListObj* list);
void list_insert_after(ListObj* list, ListObj* node);
void list_insert_before(ListObj* list, ListObj* node);
void list_remove(ListObj* node);
int list_isempty(const ListObj* list);
unsigned int list_len(const ListObj* list);
#define list_entry(node, type, member) \
container_of(node, type, member)
#define list_for_each(pos, head) \
for (pos = (head)->next; pos != (head); pos = pos->next)
#define list_for_each_safe(pos, n, head) \
for (pos = (head)->next, n = pos->next; pos != (head); \
pos = n, n = pos->next)
#endif
3)、timeslice.c
#include "timeslice.h"
static LIST_HEAD(timeslice_task_list);
void timeslice_exec(void)
{
ListObj* node;
TimesilceTaskObj* task;
list_for_each(node, ×lice_task_list)
{
task = list_entry(node, TimesilceTaskObj, timeslice_task_list);
if (task->is_run == TASK_RUN)
{
task->task_hdl();
task->is_run = TASK_STOP;
}
}
}
void timeslice_tick(void)
{
ListObj* node;
TimesilceTaskObj* task;
list_for_each(node, ×lice_task_list)
{
task = list_entry(node, TimesilceTaskObj, timeslice_task_list);
if (task->timer != 0)
{
task->timer--;
if (task->timer == 0)
{
task->is_run = TASK_RUN;
task->timer = task->timeslice_len;
}
}
}
}
unsigned int timeslice_get_task_num(void)
{
return list_len(×lice_task_list);
}
void timeslice_task_init(TimesilceTaskObj* obj, void (*task_hdl)(void), unsigned int id, unsigned int timeslice_len)
{
obj->id = id;
obj->is_run = TASK_STOP;
obj->task_hdl = task_hdl;
obj->timer = timeslice_len;
obj->timeslice_len = timeslice_len;
}
void timeslice_task_add(TimesilceTaskObj* obj)
{
list_insert_before(×lice_task_list, &obj->timeslice_task_list);
}
void timeslice_task_del(TimesilceTaskObj* obj)
{
if (timeslice_task_isexist(obj))
list_remove(&obj->timeslice_task_list);
else
return;
}
unsigned char timeslice_task_isexist(TimesilceTaskObj* obj)
{
unsigned char isexist = 0;
ListObj* node;
TimesilceTaskObj* task;
list_for_each(node, ×lice_task_list)
{
task = list_entry(node, TimesilceTaskObj, timeslice_task_list);
if (obj->id == task->id)
isexist = 1;
}
return isexist;
}
unsigned int timeslice_get_task_timeslice_len(TimesilceTaskObj* obj)
{
return obj->timeslice_len;
}
4)、timeslice.h
#ifndef _TIMESLICE_H
#define _TIMESLICE_H
#include "list.h"
typedef enum {
TASK_STOP,
TASK_RUN
} IsTaskRun;
typedef struct timesilce
{
unsigned int id;
void (*task_hdl)(void);
IsTaskRun is_run;
unsigned int timer;
unsigned int timeslice_len;
ListObj timeslice_task_list;
} TimesilceTaskObj;
void timeslice_exec(void);
void timeslice_tick(void);
void timeslice_task_init(TimesilceTaskObj* obj, void (*task_hdl)(void), unsigned int id, unsigned int timeslice_len);
void timeslice_task_add(TimesilceTaskObj* obj);
void timeslice_task_del(TimesilceTaskObj* obj);
unsigned int timeslice_get_task_timeslice_len(TimesilceTaskObj* obj);
unsigned int timeslice_get_task_num(void);
unsigned char timeslice_task_isexist(TimesilceTaskObj* obj);
#endif
5)、task_demo.c
#include <stdio.h>
#include "timeslice.h"
#include "gpio.h"
// 创建5个任务对象
TimesilceTaskObj task_1, task_2, task_3, task_4, task_5, task_led;
// 具体的任务函数
void task1_hdl(void)
{
printf(">> task 1 is running ...\n");
}
void task2_hdl(void)
{
printf(">> task 2 is running ...\n");
}
void task3_hdl(void)
{
printf(">> task 3 is running ...\n");
}
void task4_hdl(void)
{
printf(">> task 4 is running ...\n");
}
void task5_hdl(void)
{
printf(">> task 5 is running ...\n");
}
void led_hd1(void)
{
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
}
// 初始化任务对象,并且将任务添加到时间片轮询调度中
void task_init(void)
{
timeslice_task_init(&task_1, task1_hdl, 1, 10);
timeslice_task_init(&task_2, task2_hdl, 2, 20);
timeslice_task_init(&task_3, task3_hdl, 3, 30);
timeslice_task_init(&task_4, task4_hdl, 4, 40);
timeslice_task_init(&task_5, task5_hdl, 5, 50);
timeslice_task_init(&task_led, led_hd1, 6, 1000);
timeslice_task_add(&task_1);
timeslice_task_add(&task_2);
timeslice_task_add(&task_3);
timeslice_task_add(&task_4);
timeslice_task_add(&task_5);
timeslice_task_add(&task_led);
}
void task_run(void)
{
task_init();
printf(">> task num: %d\n", timeslice_get_task_num());
printf(">> task len: %d\n", timeslice_get_task_timeslice_len(&task_3));
timeslice_task_del(&task_2);
printf(">> delet task 2\n");
printf(">> task 2 is exist: %d\n", timeslice_task_isexist(&task_2));
printf(">> task num: %d\n", timeslice_get_task_num());
timeslice_task_del(&task_5);
printf(">> delet task 5\n");
printf(">> task num: %d\n", timeslice_get_task_num());
printf(">> task 3 is exist: %d\n", timeslice_task_isexist(&task_3));
timeslice_task_add(&task_2);
printf(">> add task 2\n");
printf(">> task 2 is exist: %d\n", timeslice_task_isexist(&task_2));
timeslice_task_add(&task_5);
printf(">> add task 5\n");
printf(">> task num: %d\n", timeslice_get_task_num());
printf("\n\n========timeslice running===========\n");
while(1)
{
timeslice_exec();
}
}6)、task_demo.h
#ifndef _TASK_DEMO_H
#define _TASK_DEMO_H
void task_run(void);
#endif
4、main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "task_demo.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim1);
printf("heihei\r\n");
task_run();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
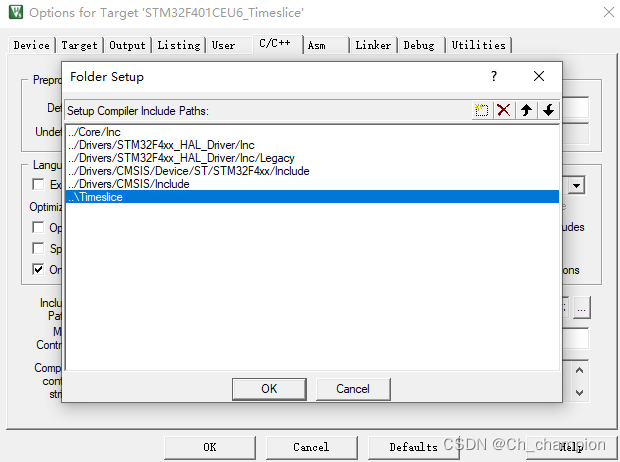
分别添加以下6个文件:list.c、list.h、task_demo.c、task_demo.h、timeslice.c、timeslice.h。同时,把timslice目录下的.h文件包含进项目中来,如下所示:



注意:keil上需要勾选Use MicroLIB,否则CubeMX生成的串口工程无法打印问题

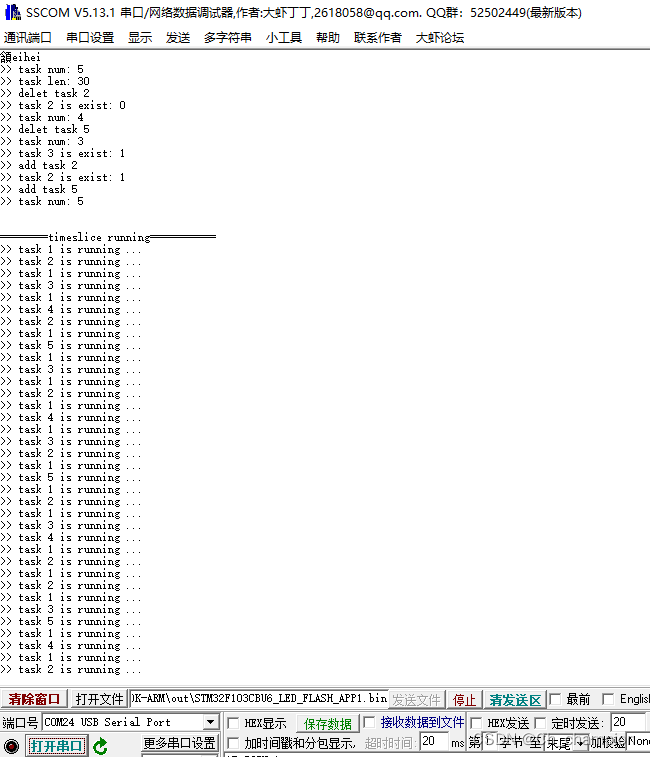
四、运行结果
五、代码解释
时间片轮询架构
其实该部分主要使用了面向对象的思维,使用结构体作为对象,并使用结构体指针作为参数传递,这样作可以节省资源,并且有着极高的运行效率。
其中最难的部分是侵入式链表的使用,这种链表在一些操作系统内核中使用十分广泛,这里是参考RT-Thread实时操作系统中的侵入式链表实现。
底层侵入式双向链表
该链表是linux内核中使用十分广泛,也十分经典,其原理具体可以参考文章:
https://www.cnblogs.com/skywang12345/p/3562146.html
六、总结
好了,终于介绍完毕,以后裸机开发,有了此时间片论法,如虎添翼。感谢各位同仁参阅。
参考文章:
1、单片机面向对象思维的架构:时间轮片法_strongerHuang的博客-CSDN博客
2、【嵌入式开源库】timeslice的使用,完全解耦的时间片轮询框架构-CSDN博客