激光能识别的上下高度范围是多少?
激光雷达是一种典型的束波型传感器,扫描的射线呈束波状,打到物体上是一个光斑,并且距离越远,光斑越大。激光光斑的大小和激光雷达的制造工艺相关,一般来说在10m处光斑的大小可以达到7cm半径的圆。此外还要考虑到同一个光斑打到不同物体上所形成的拖尾
拖尾点云过滤
通过激光雷达扫描原理可以得知,激光雷达发送端发射一个脉冲,打到物体后返回,接收端接收到回波后计算两者之间接收时间差,并通过乘以光速来实现物体之间距离的测量。理想情况下,脉冲打到物体表面是一个理想的光斑点,但由于实际的脉冲存在一定的发散角,所以打到物体上会是一个面,且随距离增加,这个面会越大。这样就存在一种可能性,当存在前后两个物体,且激光雷达脉冲打到前面物体的边缘时,就有可能出现部分激光脉冲打到后面物体上,这就是激光雷达的“拖尾”问题。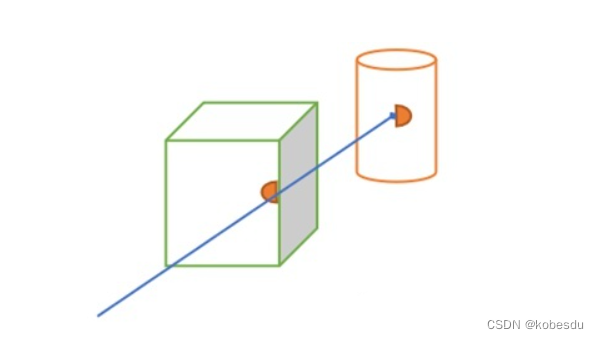
拖尾剔除算法的原理如下图所示:
图中 p1 和 p2 代