RIS辅助MIMO广播信道容量
- 摘要
- RIS辅助的BC容量
- 矩阵形式的泰勒展开学习
- 舒尔补
RIS-Aided Multiple-Input Multiple-Output
Broadcast Channel Capacity论文阅读记录
基于泰勒展开求解了上行容量和最差用户的可达速率,学习其中的展开方法。
摘要
Scalable algorithms are conceived for obtaining the
sum-rate capacity of the reconfigurable intelligent surface (RIS)-
aided multiuser (MU) multiple-input multiple-output (MIMO)
broadcast channel (BC), where a multi-antenna base station (BS)
transmits signals to multi-antenna users with the help of an
RIS equipped with a massive number of finite-resolution pro-
grammable reflecting elements (PREs). As a byproduct, scalable
path-following algorithms emerge for determining the sum-rate
capacity of the conventional MIMO BCs, closing a long-standing
open problem of information theory. The paper also develops
scalable algorithms for maximizing the minimum rate (max-min
rate optimization) of the users achieved by the joint design of
RIS’s PRE and transmit beamforming for such an RIS-aided BC.
The simulations provided confirm the high performance achieved
by the algorithms developed, despite their low computational
complexity.
可扩展算法旨在获得可重构智能表面 (RIS) 辅助多用户 (MU) 多输入多输出 (MIMO) 广播信道 (BC) 的总速率容量,其中多天线基站 (BS) 进行传输借助配备大量有限分辨率可编程反射元件 (PRE) 的 RIS,向多天线用户发送信号。作为副产品,可扩展的路径跟踪算法出现了,用于确定传统 MIMO BC 的总速率容量,解决了信息论中长期存在的开放问题。该论文还开发了可扩展算法,通过 RIS PRE 的联合设计和针对 RIS 辅助 BC 的传输波束成形来最大化用户的最小速率(最大-最小速率优化)。所提供的模拟证实了所开发的算法所实现的高性能,尽管其计算复杂度较低。
RIS辅助的BC容量
矩阵形式的泰勒展开学习
log det ( I n d + H d K x H d H ) − log det ( K v ′ + H e K x H e H ) ≥ log det ( I n d + H d K x H d H ) − log det ( K v ′ ( 0 ) + H e K x ( 0 ) H e H ) − Tr ( H e H ( K v ′ ( 0 ) + H e K x ( 0 ) H e H ) − 1 H e K x ) + Tr ( H e H ( K v ′ ( 0 ) + H e K x ( 0 ) H e H ) − 1 H e K x ( 0 ) ) . \begin{array}{l} \log \operatorname{det}\left(\mathbf{I}_{n_{d}}+\mathbf{H}_{d} \mathbf{K}_{x} \mathbf{H}_{d}^{H}\right)-\log \operatorname{det}\left(\mathbf{K}_{v^{\prime}}+\mathbf{H}_{e} \mathbf{K}_{x} \mathbf{H}_{e}^{H}\right)\\ \ge \log \operatorname{det}\left(\mathbf{I}_{n_{d}}+\mathbf{H}_{d} \mathbf{K}_{x} \mathbf{H}_{d}^{H}\right)-\log \operatorname{det}\left(\mathbf{K}_{v^{\prime}}^{(0)}+\mathbf{H}_{e} \mathbf{K}_{x}^{(0)} \mathbf{H}_{e}^{H}\right) \\ -\operatorname{Tr}\left(\mathbf{H}_{e}^{H}\left(\mathbf{K}_{v^{\prime}}^{(0)}+\mathbf{H}_{e} \mathbf{K}_{x}^{(0)} \mathbf{H}_{e}^{H}\right)^{-1} \mathbf{H}_{e} \mathbf{K}_{x}\right) \\ +\operatorname{Tr}\left(\mathbf{H}_{e}^{H}\left(\mathbf{K}_{v^{\prime}}^{(0)}+\mathbf{H}_{e} \mathbf{K}_{x}^{(0)} \mathbf{H}_{e}^{H}\right)^{-1} \mathbf{H}_{e} \mathbf{K}_{x}^{(0)}\right) . \end{array} logdet(Ind+HdKxHdH)−logdet(Kv′+HeKxHeH)≥logdet(Ind+HdKxHdH)−logdet(Kv′(0)+HeKx(0)HeH)−Tr(HeH(Kv′(0)+HeKx(0)HeH)−1HeKx)+Tr(HeH(Kv′(0)+HeKx(0)HeH)−1HeKx(0)).
log det ( K v ′ + H e K x H e H ) ≤ log det ( K v ′ ( 0 ) + H e K x ( 0 ) H e H ) + Tr ( H e H ( K v ′ ( 0 ) + H e K x ( 0 ) H e H ) − 1 H e K x ) − Tr ( H e H ( K v ′ ( 0 ) + H e K x ( 0 ) H e H ) − 1 H e K x ( 0 ) ) \log \operatorname{det}\left(\mathbf{K}_{v^{\prime}}+\mathbf{H}_{e} \mathbf{K}_{x} \mathbf{H}_{e}^{H}\right) \le \log \operatorname{det}\left(\mathbf{K}_{v^{\prime}}^{(0)}+\mathbf{H}_{e} \mathbf{K}_{x}^{(0)} \mathbf{H}_{e}^{H}\right) \\ +\operatorname{Tr}\left(\mathbf{H}_{e}^{H}\left(\mathbf{K}_{v^{\prime}}^{(0)}+\mathbf{H}_{e} \mathbf{K}_{x}^{(0)} \mathbf{H}_{e}^{H}\right)^{-1} \mathbf{H}_{e} \mathbf{K}_{x}\right) \\ -\operatorname{Tr}\left(\mathbf{H}_{e}^{H}\left(\mathbf{K}_{v^{\prime}}^{(0)}+\mathbf{H}_{e} \mathbf{K}_{x}^{(0)} \mathbf{H}_{e}^{H}\right)^{-1} \mathbf{H}_{e} \mathbf{K}_{x}^{(0)}\right) logdet(Kv′+HeKxHeH)≤logdet(Kv′(0)+HeKx(0)HeH)+Tr(HeH(Kv′(0)+HeKx(0)HeH)−1HeKx)−Tr(HeH(Kv′(0)+HeKx(0)HeH)−1HeKx(0))
function:
f
=
log
(
d
e
t
(
H
⋅
X
⋅
Z
+
Y
)
)
f = \log(\mathrm{det}(H\cdot X\cdot Z+Y))
f=log(det(H⋅X⋅Z+Y))
gradient:
∂
f
∂
X
=
(
Z
⋅
i
n
v
(
Y
+
H
⋅
X
⋅
Z
)
⋅
H
)
⊤
\frac{\partial f}{\partial X} = (Z\cdot \mathrm{inv}(Y+H\cdot X\cdot Z)\cdot H)^\top
∂X∂f=(Z⋅inv(Y+H⋅X⋅Z)⋅H)⊤
where
\begin{itemize}
\item
H
H
H is a matrix
\item
X
X
X is a matrix
\item
Y
Y
Y is a matrix
\item
Z
Z
Z is a matrix
\end{itemize}
多元函数的泰勒展开式
摘抄自https://zhuanlan.zhihu.com/p/33316479
实际优化问题的目标函数往往比较复杂。为了使问题简化,通常将目标函数在某点附近展开为泰勒(Taylor)多项式来逼近原函数。
一元函数在点 x k x_k xk处的泰勒展开式为
f ( x ) = f ( x k ) + ( x − x k ) f ′ ( x k ) + 1 2 ! ( x − x k ) 2 f ′ ′ ( x k ) + o n f(x)=f\left(x_{k}\right)+\left(x-x_{k}\right) f^{\prime}\left(x_{k}\right)+\frac{1}{2 !}\left(x-x_{k}\right)^{2} f^{\prime \prime}\left(x_{k}\right)+o^{n} f(x)=f(xk)+(x−xk)f′(xk)+2!1(x−xk)2f′′(xk)+on
二元函数在点
(
x
k
,
y
k
)
(x_k,y_k)
(xk,yk)处的泰勒展开式为:
f
(
x
,
y
)
=
f
(
x
k
,
y
k
)
+
(
x
−
x
k
)
f
x
′
(
x
k
,
y
k
)
+
(
y
−
y
k
)
f
y
′
(
x
k
,
y
k
)
+
1
2
!
(
x
−
x
k
)
2
f
x
x
′
′
(
x
k
,
y
k
)
+
1
2
!
(
x
−
x
k
)
(
y
−
y
k
)
f
x
y
′
′
(
x
k
,
y
k
)
+
1
2
!
(
x
−
x
k
)
(
y
−
y
k
)
f
y
x
′
′
(
x
k
,
y
k
)
+
1
2
!
(
y
−
y
k
)
2
f
y
y
′
′
(
x
k
,
y
k
)
+
o
n
\begin{array}{c} f(x, y)=f\left(x_{k}, y_{k}\right)+\left(x-x_{k}\right) f_{x}^{\prime}\left(x_{k}, y_{k}\right)+\left(y-y_{k}\right) f_{y}^{\prime}\left(x_{k}, y_{k}\right) \\ +\frac{1}{2 !}\left(x-x_{k}\right)^{2} f_{x x}^{\prime \prime}\left(x_{k}, y_{k}\right)+\frac{1}{2 !}\left(x-x_{k}\right)\left(y-y_{k}\right) f_{x y}^{\prime \prime}\left(x_{k}, y_{k}\right) \\ +\frac{1}{2 !}\left(x-x_{k}\right)\left(y-y_{k}\right) f_{y x}^{\prime \prime}\left(x_{k}, y_{k}\right)+\frac{1}{2 !}\left(y-y_{k}\right)^{2} f_{y y}^{\prime \prime}\left(x_{k}, y_{k}\right) \\ +o^{n} \end{array}
f(x,y)=f(xk,yk)+(x−xk)fx′(xk,yk)+(y−yk)fy′(xk,yk)+2!1(x−xk)2fxx′′(xk,yk)+2!1(x−xk)(y−yk)fxy′′(xk,yk)+2!1(x−xk)(y−yk)fyx′′(xk,yk)+2!1(y−yk)2fyy′′(xk,yk)+on

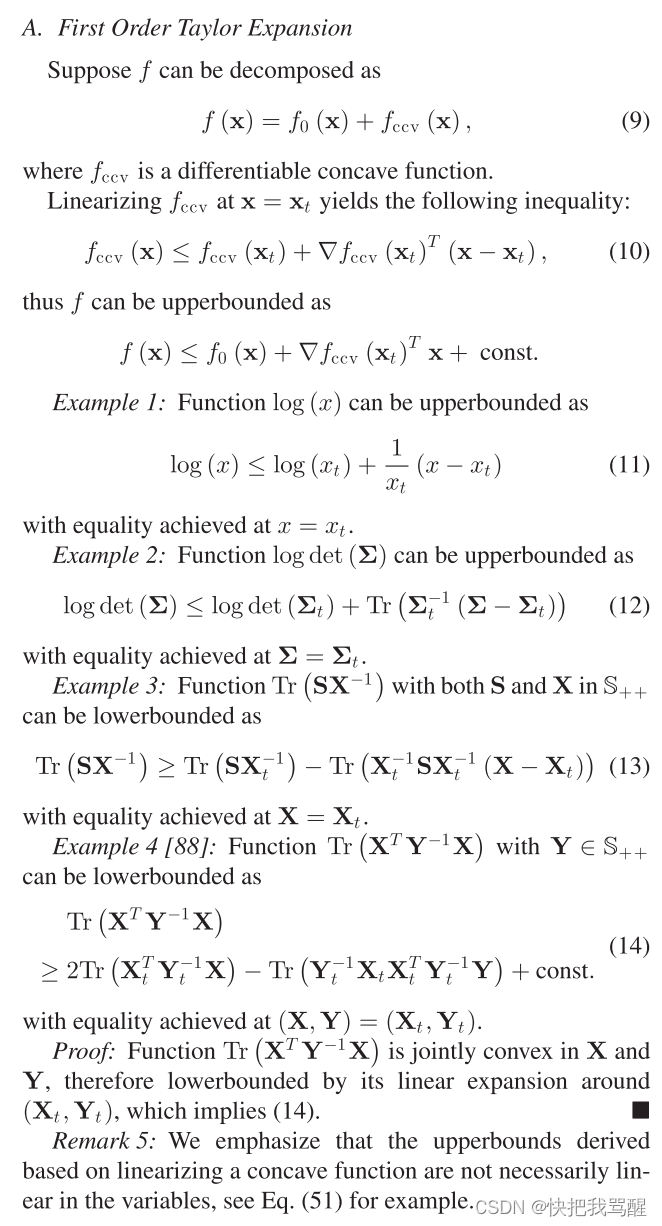
MM算法中的一阶泰勒展开代函数
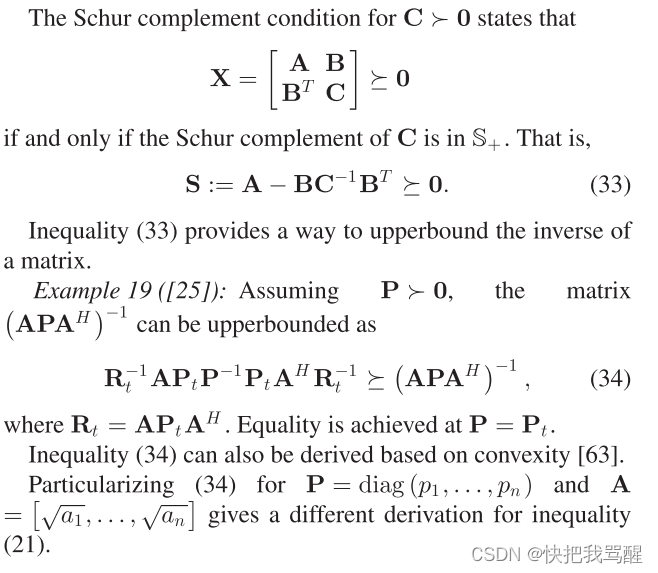
舒尔补
Schur Complement