文章目录
- 1、前言
- 2、unordered系列关联式容器
- 2.1、 unordered_map
- 2.1.1、unordered_map的文档介绍
- 2.1.2、unordered_map的接口说明
- 2.2、 unordered_set
- 3. 底层结构
- 3.1 哈希概念
- 3.2 哈希冲突
- 2.3 哈希函数
- 2.4 哈希冲突解决
- 2.4.1 闭散列
- 2.4.2 开散列
- 4. 模拟实现
- 4.1 哈希表的改造
- 4.2 unordered_map
- 5、 哈希的应用
- 5.1 位图
- 5.1.1 位图概念
- 5.1.2 位图的实现
- 5.1.3 位图的应用
- 5.2 布隆过滤器
- 5.2.1 布隆过滤器提出
- 5.2.2布隆过滤器概念
- 5.2.3 布隆过滤器的插入
- 5.2.4 布隆过滤器的查找
- 5.2.5 布隆过滤器删除
- 5.2.6 布隆过滤器优点
- 5.2.7 布隆过滤器缺陷
1、前言
哈希表是一种非常重要的数据结构,它在各种场合中都有广泛的应用。在C++中,哈希表通常是通过标准模板库(STL)中的unordered_map或unordered_set来实现的。本篇文章将向读者介绍哈希表的基本概念、原理、实现方法以及优化策略。通过掌握哈希表,我们可以实现高效的查找和插入操作。
2、unordered系列关联式容器
在C++98标准中,STL提供了底层数据结构为红黑树的一系列关联式容器,例如map、set、multimap和multiset等。这些关联式容器在查询操作中的效率可以达到 l o g 2 N log_2 N log2N,也就是说,在最坏的情况下,我们只需要比较红黑树的高度次就可以找到目标元素。然而,当树中的节点数量非常多时,查询效率可能会变得不太理想。为了追求更高的查询效率,C++11标准中引入了四个unordered系列的关联式容器,分别是unordered_map、unordered_set、unordered_multimap和unordered_multiset。这些容器与红黑树结构的关联式容器在使用方式上基本类似,但是底层实现的数据结构不同。在本篇文章中,我们主要对unordered_map和unordered_set进行介绍。
2.1、 unordered_map
2.1.1、unordered_map的文档介绍
unordered_map的在线文档说明
要点:
- unordered_map是存储<key, value>键值对的关联式容器,其允许通过keys快速的索引到与
其对应的value。 - 在unordered_map中,键值通常用于唯一地标识元素,而映射值是一个对象,其内容与此
键关联。键和映射值的类型可能不同。 - 在内部,unordered_map没有对<kye, value>按照任何特定的顺序排序, 为了能在常数范围内
找到key所对应的value,unordered_map将相同哈希值的键值对放在相同的桶中。 - unordered_map容器通过key访问单个元素要比map快,但它通常在遍历元素子集的范围迭
代方面效率较低。 - unordered_maps实现了直接访问操作符(operator[]),它允许使用key作为参数直接访问
value。 - 它的迭代器至少是前向迭代器。
2.1.2、unordered_map的接口说明
- unordered_map的构造
| 函数声明 | 功能介绍 |
|---|---|
| unordered_map | 构造不同格式的unordered_map对象 |
- unordered_map的容量
| 函数声明 | 功能介绍 |
|---|---|
| bool empty() const | 检测unordered_map是否为空 |
| size_t size() const | 获取unordered_map的有效元素个数 |
- unordered_map的迭代器
| 函数声明 | 功能介绍 |
|---|---|
| begin | 返回unordered_map第一个元素的迭代器 |
| end | 返回unordered_map最后一个元素下一个位置的迭代器 |
| cbegin | 返回unordered_map第一个元素的const迭代器 |
| cend | 返回unordered_map最后一个元素下一个位置的const迭代器 |
- unordered_map的元素访问
| 函数声明 | 功能介绍 |
|---|---|
| operator[] | 返回与key对应的value,没有一个默认值 |
注意:该函数中实际调用哈希桶的插入操作,用参数key与V()构造一个默认值往底层哈希桶中插入,如果key不在哈希桶中,插入成功,返回V(),插入失败,说明key已经在哈希桶中,将key对应的value返回。
- unordered_map的查询
| 函数声明 | 功能介绍 |
|---|---|
| iterator find(const K& key) | 返回key在哈希桶中的位置 |
| size_t count(const K& key) | 返回哈希桶中关键码为key的键值对的个数 |
注意:unordered_map中key是不能重复的,因此count函数的返回值最大为1。
- unordered_map的修改操作
| 函数声明 | 功能介绍 |
|---|---|
| insert | 向容器中插入键值对 |
| erase | 删除容器中的键值对 |
| void clear() | 清空容器中有效元素个数 |
| void swap(unordered_map&) | 交换两个容器中的元素 |
- unordered_map的桶操作
| 函数声明 | 功能介绍 |
|---|---|
| size_t bucket_count()const | 返回哈希桶中桶的总个数 |
| size_t bucket_size(size_t n)const | 返回n号桶中有效元素的总个数 |
| size_t bucket(const K& key) | 返回元素key所在的桶号 |
代码演示如下:
#include<iostream>
#include<unordered_map>
#include<string>
using namespace std;
int main()
{
unordered_map<string, string> mp1;
mp1["sort"] = "排序";//operator["xxx"]="yyy" :如果xxx存在,插入失败,返回已经存在的yyy,否则插入后再返回yyy
mp1["judge"] = "比较";
mp1["insert"] = "插入";
unordered_map<string, string> mp2(mp1.begin(), mp1.end());
unordered_map<string, string> mp3 = mp2;
unordered_map<string, string> mp4 = { {"abandon","放弃"},{"happy","高兴"},{"upset","沮丧"} };
for (auto& e : mp1)
{
cout << e.first << ":" << e.second << endl;
}
cout << endl;
for (auto& e : mp2)
{
cout << e.first << ":" << e.second << endl;
}
cout << endl;
for (auto& e : mp3)
{
cout << e.first << ":" << e.second << endl;
}
cout << endl;
for (auto& e : mp4)
{
cout << e.first << ":" << e.second << endl;
}
cout << endl;
cout << mp1.empty() << endl;//bool empty() const
cout << mp4.size() << endl; //获取unordered_map的有效元素个数
auto it = mp4.begin();//begin()
while (it != mp4.end())//end()
{
cout << it->first << ":" << it->first << endl;
++it;
}
cout << endl;
string input;
getline(cin, input);
auto fit = mp4.find(input);
if (fit != mp4.end())
{
cout << fit->first << ":" << fit->second << endl;
}
cout << "ababdon单词的个数为:" << mp4.count("abandon") << endl;
mp4.insert({ "word","单词" });
for (auto& e : mp4)
{
cout << e.first << ":" << e.second << endl;
}
cout << endl;
mp4.erase("abandon");
for (auto& e : mp4)
{
cout << e.first << ":" << e.second << endl;
}
cout << endl;
mp4.clear();
cout << mp4.empty() << endl;
mp4.swap(mp1);
for (auto& e : mp4)
{
cout << e.first << ":" << e.second << endl;
}
cout << endl;
cout << mp4.bucket_count() << endl;
cout << mp4.bucket_size(1) << endl;
cout << mp4.bucket("insert") << endl;
return 0;
}
2.2、 unordered_set
参见 unordered_set在线文档说明
3. 底层结构
unordered系列的关联式容器之所以效率比较高,是因为其底层使用了哈希结构。哈希表是一种使用哈希函数将键(key)映射到桶(bucket)中的数据结构。这个映射过程可以在常数时间内完成,因此哈希表提供了非常快速的插入、删除和查找操作。
3.1 哈希概念
顺序结构以及平衡树中,元素关键码与其存储位置之间没有对应的关系,因此在查找一个元素
时,必须要经过关键码的多次比较。顺序查找时间复杂度为O(N),平衡树中为树的高度,即
O(
l
o
g
2
N
log_2 N
log2N),搜索的效率取决于搜索过程中元素的比较次数。
理想的搜索方法:可以不经过任何比较,一次直接从表中得到要搜索的元素。如果构造一种存储结构,通过某种函数(hashFunc)使元素的存储位置与它的关键码之间能够建立一一映射的关系,那么在查找时通过该函数可以很快找到该元素。
当向该结构中:
插入元素:
根据待插入元素的关键码,以此函数计算出该元素的存储位置并按此位置进行存放。
搜索元素:
对元素的关键码进行同样的计算,把求得的函数值当做元素的存储位置,在结构中按此位置
取元素比较,若关键码相等,则搜索成功。
该方式即为哈希(散列)方法,哈希方法中使用的转换函数称为哈希(散列)函数,构造出来的结构称
为哈希表(Hash Table)(或者称散列表)。
例如:数据集合{1,7,6,4,5,9};
哈希函数设置为:hash(key) = key % capacity; capacity为存储元素底层空间总的大小。
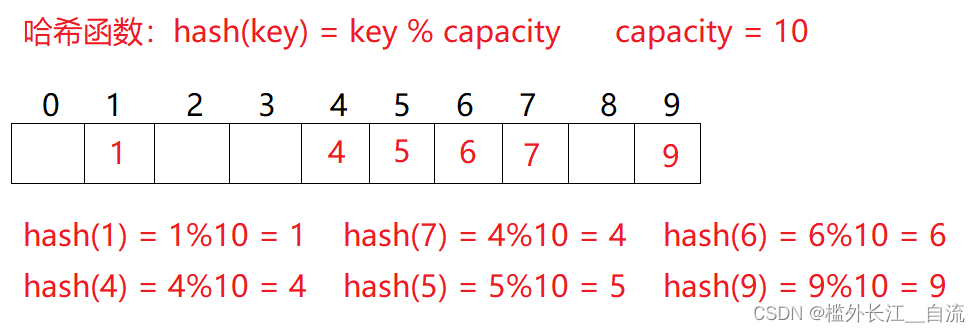
用该方法进行搜索不必进行多次关键码的比较,因此搜索的速度比较快。
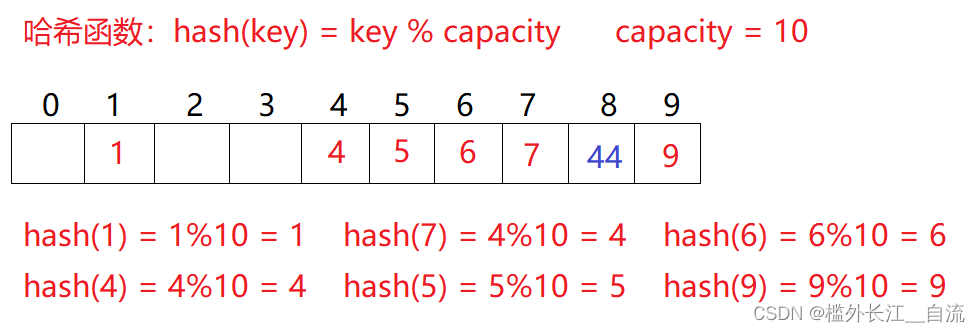
问题:按照上述哈希方式,向集合中插入元素44,会出现什么问题?那么就得说明一下不同元素映射到相同的位置是,产生哈希冲突。
3.2 哈希冲突
对于两个数据元素的关键字
k
i
k_i
ki和
k
j
k_j
kj(i != j),有
k
i
k_i
ki !=
k
j
k_j
kj,但有:Hash(
k
i
k_i
ki) ==
Hash(
k
j
k_j
kj),即:不同关键字通过相同哈希哈数计算出相同的哈希地址,该种现象称为哈希冲突
或哈希碰撞。
把具有不同关键码而具有相同哈希地址的数据元素称为“同义词”。
发生哈希冲突该如何处理呢?
2.3 哈希函数
引起哈希冲突的一个原因可能是:哈希函数设计不够合理。
哈希函数设计原则:
1、哈希函数的定义域必须包括需要存储的全部关键码,而如果散
列表允许有m个地址时,其值 域必须在0到m-1之间
2、哈希函数计算出来的地址能均匀分布在整个空间中
3、哈希函数应该比较简单
常见哈希函数:
- 直接定址法–(常用)
取关键字的某个线性函数为散列地址:Hash(Key)= A*Key + B
优点:简单、均匀
缺点:需要事先知道关键字的分布情况
使用场景:适合查找比较小且连续的情况 - 除留余数法–(常用)
设散列表中允许的地址数为m,取一个不大于m,但最接近或者等于m的质数p作为除数,
按照哈希函数:Hash(key) = key% p(p<=m),将关键码转换成哈希地址 - 平方取中法–(了解)
假设关键字为1234,对它平方就是1522756,抽取中间的3位227作为哈希地址;
再比如关键字为4321,对它平方就是18671041,抽取中间的3位671(或710)作为哈希地址
平方取中法比较适合:不知道关键字的分布,而位数又不是很大的情况。 - 折叠法–(了解)
折叠法是将关键字从左到右分割成位数相等的几部分(最后一部分位数可以短些),然后将这
几部分叠加求和,并按散列表表长,取后几位作为散列地址。
折叠法适合事先不需要知道关键字的分布,适合关键字位数比较多的情况。 - 随机数法–(了解)
选择一个随机函数,取关键字的随机函数值为它的哈希地址,即H(key) = random(key),其中
random为随机数函数。
通常应用于关键字长度不等时采用此法。 - 数学分析法–(了解)
设有n个d位数,每一位可能有r种不同的符号,这r种不同的符号在各位上出现的频率不一定
相同,可能在某些位上分布比较均匀,每种符号出现的机会均等,在某些位上分布不均匀只
有某几种符号经常出现。可根据散列表的大小,选择其中各种符号分布均匀的若干位作为散
列地址。例如:
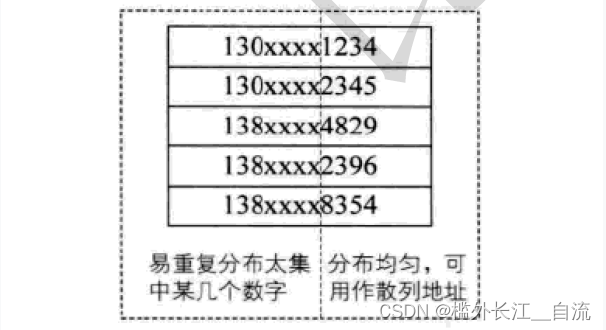
假设要存储某家公司员工登记表,如果用手机号作为关键字,那么极有可能前7位都是相同的,那么我们可以选择后面的四位作为散列地址,如果这样的抽取工作还容易出现冲突,还可以对抽取出来的数字进行反转(如1234改成4321)、右环位移(如1234改成4123)、左环移位、前两数与后两数叠加(如1234改成12+34=46)等方法。
数字分析法通常适合处理关键字位数比较大的情况,如果事先知道关键字的分布且关键字的若干位分布较均匀的情况。
注意:哈希函数设计的越精妙,产生哈希冲突的可能性就越低,但是无法避免哈希冲突。
2.4 哈希冲突解决
解决哈希冲突两种常见的方法是:闭散列和开散列
2.4.1 闭散列
闭散列:也叫开放定址法,当发生哈希冲突时,如果哈希表未被装满,说明在哈希表中必然还有空位置,那么可以把key存放到冲突位置中的“下一个” 空位置中去。那如何寻找下一个空位置呢?
1. 线性探测
比如3.1中的场景,现在需要插入元素44,先通过哈希函数计算哈希地址,hashAddr为4,因此44理论上应该插在该位置,但是该位置已经放了值为4的元素,即发生哈希冲突。
线性探测:从发生冲突的位置开始,依次向后探测,直到寻找到下一个空位置为止。
插入
通过哈希函数获取待插入元素在哈希表中的位置,如果该位置中没有元素则直接插入新元素,如果该位置中有元素发生哈希冲突,使用线性探测找到下一个空位置,插入新元素。
删除
采用闭散列处理哈希冲突时,不能随便物理删除哈希表中已有的元素,若直接删除元素会影响其他元素的搜索。比如删除元素4,如果直接删除掉,44查找起来可能会受影响。因此线性探测采用标记的伪删除法来删除一个元素。
方法:哈希表每个空间给个标记,EMPTY此位置空, EXIST此位置已经有元素,DELETE元素已经删除。
enum State{EMPTY, EXIST, DELETE};
2.线性探测的实现
// 注意:假如实现的哈希表中元素唯一,即key相同的元素不再进行插入
// 为了实现简单,此哈希表中我们将比较直接与元素绑定在一起
template<class K, class V>
class HashTable
{
struct Elem
{
pair<K, V> _val;
State _state;
};
public:
HashTable(size_t capacity = 3)
: _ht(capacity), _size(0)
{
for(size_t i = 0; i < capacity; ++i)
_ht[i]._state = EMPTY;
}
bool Insert(const pair<K, V>& val)
{
// 检测哈希表底层空间是否充足
// _CheckCapacity();
size_t hashAddr = HashFunc(key);
// size_t startAddr = hashAddr;
while(_ht[hashAddr]._state != EMPTY)
{
if(_ht[hashAddr]._state == EXIST && _ht[hashAddr]._val.first
== key)
return false;
hashAddr++;
if(hashAddr == _ht.capacity())
hashAddr = 0;
/*
// 转一圈也没有找到,注意:动态哈希表,该种情况可以不用考虑,哈希表中元
素个数到达一定的数量,哈希冲突概率会增大,需要扩容来降低哈希冲突,因此哈希表中元素是
不会存满的
if(hashAddr == startAddr)
return false;
*/
}
// 插入元素
_ht[hashAddr]._state = EXIST;
_ht[hashAddr]._val = val;
_size++;
return true;
}
int Find(const K& key)
{
size_t hashAddr = HashFunc(key);
while(_ht[hashAddr]._state != EMPTY)
{
if(_ht[hashAddr]._state == EXIST && _ht[hashAddr]._val.first
== key)
return hashAddr;
hashAddr++;
}
return hashAddr;
}
bool Erase(const K& key)
{
int index = Find(key);
if(-1 != index)
{
_ht[index]._state = DELETE;
_size++;
return true;
}
return false;
}
size_t Size()const;
bool Empty() const;
void Swap(HashTable<K, V, HF>& ht);
private:
size_t HashFunc(const K& key)
{
return key % _ht.capacity();
}
private:
vector<Elem> _ht;
size_t _size;
};
哈希表什么情况下进行扩容?如何扩容?

void CheckCapacity()
{
if(_size * 10 / _ht.capacity() >= 7)
{
HashTable<K, V, HF> newHt(GetNextPrime(ht.capacity));
for(size_t i = 0; i < _ht.capacity(); ++i)
{
if(_ht[i]._state == EXIST)
newHt.Insert(_ht[i]._val);
}
Swap(newHt);
}
}
线性探测优点:实现非常简单,
线性探测缺点:一旦发生哈希冲突,所有的冲突连在一起,容易产生数据“堆积”,即:不同
关键码占据了可利用的空位置,使得寻找某关键码的位置需要许多次比较,导致搜索效率降
低。如何缓解呢?
二次探测
线性探测的缺陷是产生冲突的数据堆积在一块,这与其找下一个空位置有关系,因为找空位
置的方式就是挨着往后逐个去找,因此二次探测为了避免该问题,找下一个空位置的方法
为:
H
i
H_i
Hi = (
H
0
H_0
H0 +
i
2
i^2
i2 )% m, 或者:
H
i
H_i
Hi = (
H
0
H_0
H0 -
i
2
i^2
i2 )% m。其中:i =
1,2,3…,
H
0
H_0
H0是通过散列函数Hash(x)对元素的关键码 key 进行计算得到的位置,m是表
的大小。
研究表明:当表的长度为质数且表装载因子a不超过0.5时,新的表项一定能够插入,而且任
何一个位置都不会被探查两次。因此只要表中有一半的空位置,就不会存在表满的问题。在
搜索时可以不考虑表装满的情况,但在插入时必须确保表的装载因子a不超过0.5,如果超出
必须考虑增容。
因此:闭散列最大的缺陷就是空间利用率比较低,这也是哈希的缺陷。
2.4.2 开散列
- 开散列概念
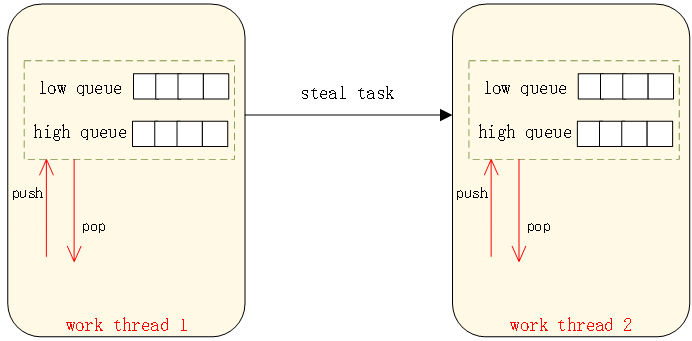
开散列法又叫链地址法(开链法),首先对关键码集合用散列函数计算散列地址,具有相同地址的关键码归于同一子集合,每一个子集合称为一个桶,各个桶中的元素通过一个单链表链接起来,各链表的头结点存储在哈希表中。
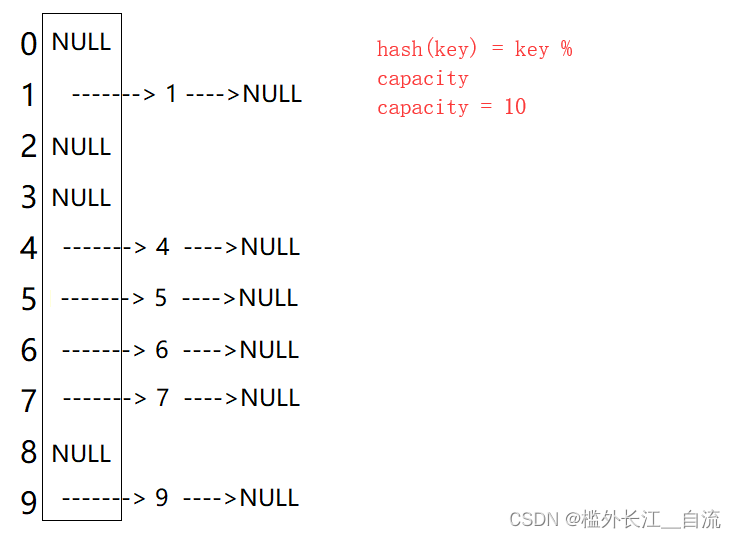
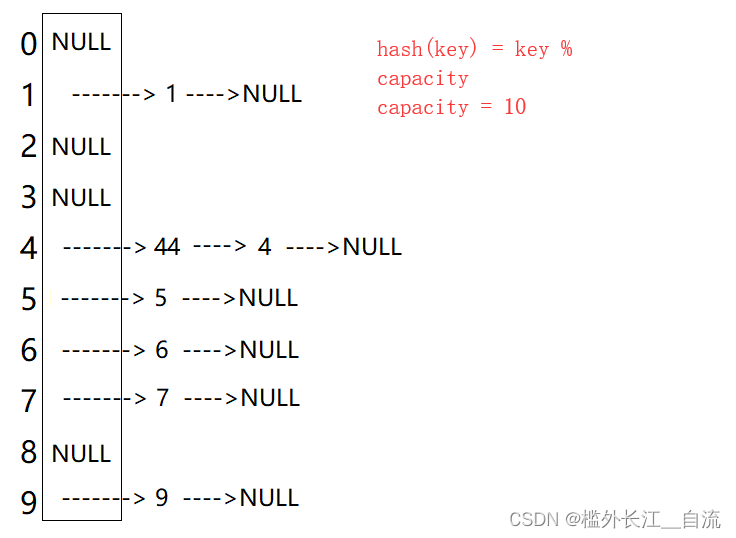
从上图可以看出,开散列中每个桶中放的都是发生哈希冲突的元素。
2. 开散列实现
template<class V>
struct HashBucketNode
{
HashBucketNode(const V& data)
: _pNext(nullptr), _data(data)
{}
HashBucketNode<V>* _pNext;
V _data;
};
// 本文所实现的哈希桶中key是唯一的
template<class V>
class HashBucket
{
typedef HashBucketNode<V> Node;
typedef Node* PNode;
public:
HashBucket(size_t capacity = 3): _size(0)
{ _ht.resize(GetNextPrime(capacity), nullptr);}
// 哈希桶中的元素不能重复
PNode* Insert(const V& data)
{
// 确认是否需要扩容。。。
// _CheckCapacity();
// 1. 计算元素所在的桶号
size_t bucketNo = HashFunc(data);
// 2. 检测该元素是否在桶中
PNode pCur = _ht[bucketNo];
while(pCur)
{
if(pCur->_data == data)
return pCur;
pCur = pCur->_pNext;
}
// 3. 插入新元素
pCur = new Node(data);
pCur->_pNext = _ht[bucketNo];
_ht[bucketNo] = pCur;
_size++;
return pCur;
}
// 删除哈希桶中为data的元素(data不会重复),返回删除元素的下一个节点
PNode* Erase(const V& data)
{
size_t bucketNo = HashFunc(data);
PNode pCur = _ht[bucketNo];
PNode pPrev = nullptr, pRet = nullptr;
while(pCur)
{
if(pCur->_data == data)
{
if(pCur == _ht[bucketNo])
_ht[bucketNo] = pCur->_pNext;
else
pPrev->_pNext = pCur->_pNext;
pRet = pCur->_pNext;
delete pCur;
_size--;
return pRet;
}
}
return nullptr;
}
PNode* Find(const V& data);
size_t Size()const;
bool Empty()const;
void Clear();
bool BucketCount()const;
void Swap(HashBucket<V, HF>& ht;
~HashBucket();
private:
size_t HashFunc(const V& data)
{
return data%_ht.capacity();
}
private:
vector<PNode*> _ht;
size_t _size; // 哈希表中有效元素的个数
};
3. 开散列增容
桶的个数是一定的,随着元素的不断插入,每个桶中元素的个数不断增多,极端情况下,可
能会导致一个桶中链表节点非常多,会影响的哈希表的性能,因此在一定条件下需要对哈希
表进行增容,那该条件怎么确认呢?开散列最好的情况是:每个哈希桶中刚好挂一个节点,
再继续插入元素时,每一次都会发生哈希冲突,因此,在元素个数刚好等于桶的个数时,可
以给哈希表增容。
void _CheckCapacity()
{
size_t bucketCount = BucketCount();
if(_size == bucketCount)
{
HashBucket<V, HF> newHt(bucketCount);
for(size_t bucketIdx = 0; bucketIdx < bucketCount; ++bucketIdx)
{
PNode pCur = _ht[bucketIdx];
while(pCur)
{
// 将该节点从原哈希表中拆出来
_ht[bucketIdx] = pCur->_pNext;
// 将该节点插入到新哈希表中
size_t bucketNo = newHt.HashFunc(pCur->_data);
pCur->_pNext = newHt._ht[bucketNo];
newHt._ht[bucketNo] = pCur;
pCur = _ht[bucketIdx];
}
}
newHt._size = _size;
this->Swap(newHt);
}
}
- 开散列的思考
- 只能存储key为整形的元素,其他类型怎么解决?
// 哈希函数采用处理余数法,被模的key必须要为整形才可以处理,此处提供将key转化为
整形的方法
// 整形数据不需要转化
template<class T>
class DefHashF
{
public:
size_t operator()(const T& val)
{
return val;
}
};
// key为字符串类型,需要将其转化为整形
class Str2Int
{
public:
size_t operator()(const string& s)
{
const char* str = s.c_str();
unsigned int seed = 131; // 31 131 1313 13131 131313
unsigned int hash = 0;
while (*str)
{
hash = hash * seed + (*str++);
}
return (hash & 0x7FFFFFFF);
}
};
// 为了实现简单,此哈希表中我们将比较直接与元素绑定在一起
template<class V, class HF>
class HashBucket
{
// ……
private:
size_t HashFunc(const V& data)
{
return HF()(data.first)%_ht.capacity();
}
};
- 除留余数法,最好模一个素数,如何每次快速取一个类似两倍关系的素数?
size_t GetNextPrime(size_t prime)
{
const int PRIMECOUNT = 28;
static const size_t primeList[PRIMECOUNT] =
{
53ul, 97ul, 193ul, 389ul, 769ul,
1543ul, 3079ul, 6151ul, 12289ul, 24593ul,
49157ul, 98317ul, 196613ul, 393241ul, 786433ul,
1572869ul, 3145739ul, 6291469ul, 12582917ul,
25165843ul,
50331653ul, 100663319ul, 201326611ul, 402653189ul,
805306457ul,
1610612741ul, 3221225473ul, 4294967291ul
};
size_t i = 0;
for (; i < PRIMECOUNT; ++i)
{
if (primeList[i] > prime)
return primeList[i];
}
return primeList[i];
}
常见的:字符串哈希算法
5. 开散列与闭散列比较
应用链地址法处理溢出,需要增设链接指针,似乎增加了存储开销。事实上:由于开地址法必须保持大量的空闲空间以确保搜索效率,如二次探查法要求装载因子a <=0.7,而表项所占空间又比指针大的多,所以使用链地址法反而比开地址法节省存储空间。
4. 模拟实现
4.1 哈希表的改造
- 模板参数列表的改造
// K:关键码类型
// V: 不同容器V的类型不同,如果是unordered_map,V代表一个键值对,如果是
unordered_set,V 为 K
// KeyOfValue: 因为V的类型不同,通过value取key的方式就不同,详细见
unordered_map/set的实现
// HF: 哈希函数仿函数对象类型,哈希函数使用除留余数法,需要将Key转换为整形数字才能
取模
template<class K, class V, class KeyOfValue, class HF = DefHashF<T> >
class HashBucket;
- 增加迭代器操作
// 为了实现简单,在哈希桶的迭代器类中需要用到hashBucket本身,
template<class K, class V, class KeyOfValue, class HF>
class HashBucket;
// 注意:因为哈希桶在底层是单链表结构,所以哈希桶的迭代器不需要--操作
template <class K, class V, class KeyOfValue, class HF>
struct HBIterator
{
typedef HashBucket<K, V, KeyOfValue, HF> HashBucket;
typedef HashBucketNode<V>* PNode;
typedef HBIterator<K, V, KeyOfValue, HF> Self;
HBIterator(PNode pNode = nullptr, HashBucket* pHt = nullptr);
Self& operator++()
{
// 当前迭代器所指节点后还有节点时直接取其下一个节点
if (_pNode->_pNext)
_pNode = _pNode->_pNext;
else
{
// 找下一个不空的桶,返回该桶中第一个节点
size_t bucketNo = _pHt->HashFunc(KeyOfValue()(_pNode-
>_data))+1;
for (; bucketNo < _pHt->BucketCount(); ++bucketNo)
{
if (_pNode = _pHt->_ht[bucketNo])
break;
}
}
return *this;
}
Self operator++(int);
V& operator*();
V* operator->();
bool operator==(const Self& it) const;
bool operator!=(const Self& it) const;
PNode _pNode; // 当前迭代器关联的节点
HashBucket* _pHt; // 哈希桶--主要是为了找下一个空桶时候方便
};
- 增加通过key获取value操作
template<class K, class V, class KeyOfValue, class HF = DefHashF<T> >
class HashBucket
{
friend HBIterator<K, V, KeyOfValue, HF>;
// ......
public:
typedef HBIterator<K, V, KeyOfValue, HF> Iterator;
//
// ...
// 迭代器
Iterator Begin()
{
size_t bucketNo = 0;
for (; bucketNo < _ht.capacity(); ++bucketNo)
{
if (_ht[bucketNo])
break;
}
if (bucketNo < _ht.capacity())
return Iterator(_ht[bucketNo], this);
else
return Iterator(nullptr, this);
}
Iterator End(){ return Iterator(nullptr, this);}
Iterator Find(const K& key);
Iterator Insert(const V& data);
Iterator Erase(const K& key);
// 为key的元素在桶中的个数
size_t Count(const K& key)
{
if(Find(key) != End())
return 1;
return 0;
}
size_t BucketCount()const{ return _ht.capacity();}
size_t BucketSize(size_t bucketNo)
{
size_t count = 0;
PNode pCur = _ht[bucketNo];
while(pCur)
{
count++;
pCur = pCur->_pNext;
}
return count;
}
// ......
};
4.2 unordered_map
// unordered_map中存储的是pair<K, V>的键值对,K为key的类型,V为value的类型,HF哈希
函数类型
// unordered_map在实现时,只需将hashbucket中的接口重新封装即可
template<class K, class V, class HF = DefHashF<K>>
class unordered_map
{
typedef pair<K, V> ValueType;
typedef HashBucket<K, ValueType, KeyOfValue, HF> HT;
// 通过key获取value的操作
struct KeyOfValue
{
const K& operator()(const ValueType& data)
{ return data.first;}
};
public:
typename typedef HT::Iterator iterator;
public:
unordered_map(): _ht()
{}
iterator begin(){ return _ht.Begin();}
iterator end(){ return _ht.End();}
// capacity
size_t size()const{ return _ht.Size();}
bool empty()const{return _ht.Empty();}
///
// Acess
V& operator[](const K& key)
{
return (*(_ht.InsertUnique(ValueType(key, V())).first)).second;
}
const V& operator[](const K& key)const;
//
// lookup
iterator find(const K& key){ return _ht.Find(key);}
size_t count(const K& key){ return _ht.Count(key);}
/
// modify
pair<iterator, bool> insert(const ValueType& valye)
{ return _ht.Insert(valye);}
iterator erase(iterator position)
{ return _ht.Erase(position);}
// bucket
size_t bucket_count(){ return _ht.BucketCount();}
size_t bucket_size(const K& key){ return _ht.BucketSize(key);}
private:
HT _ht;
};
5、 哈希的应用
5.1 位图
5.1.1 位图概念
- 面试题
给40亿个不重复的无符号整数,没排过序。给一个无符号整数,如何快速判断一个数是否在
这40亿个数中。【腾讯】 - 遍历,时间复杂度O(N)
- 排序(O(NlogN)),利用二分查找: logN
- 位图解决
数据是否在给定的整形数据中,结果是在或者不在,刚好是两种状态,那么可以使用一
个二进制比特位来代表数据是否存在的信息,如果二进制比特位为1,代表存在,为0
代表不存在。比如: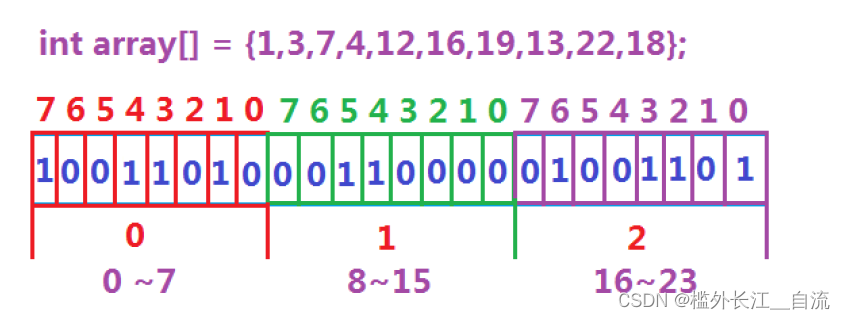
- 位图概念
所谓位图,就是用每一位来存放某种状态,适用于海量数据,数据无重复的场景。通常是用
来判断某个数据存不存在的。
5.1.2 位图的实现
class bitset
{
public:
bitset(size_t bitCount)
: _bit((bitCount>>5)+1), _bitCount(bitCount)
{}
// 将which比特位置1
void set(size_t which)
{
if(which > _bitCount)
return;
size_t index = (which >> 5);
size_t pos = which % 32;
_bit[index] |= (1 << pos);
}
// 将which比特位置0
void reset(size_t which)
{
if(which > _bitCount)
return;
size_t index = (which >> 5);
size_t pos = which % 32;
_bit[index] &= ~(1<<pos);
}
// 检测位图中which是否为1
bool test(size_t which)
{
if(which > _bitCount)
return false;
size_t index = (which >> 5);
size_t pos = which % 32;
return _bit[index] & (1<<pos);
}
// 获取位图中比特位的总个数
size_t size()const{ return _bitCount;}
// 位图中比特为1的个数
size_t Count()const
{
int bitCnttable[256] = {
0, 1, 1, 2, 1, 2, 2, 3, 1, 2, 2, 3, 2, 3, 3, 4, 1, 2, 2, 3, 2, 3, 3, 4, 2,
3, 3, 4, 3, 4, 4, 5, 1, 2, 2, 3, 2, 3, 3, 4, 2, 3, 3, 4, 3, 4, 4, 5, 2, 3,
3, 4, 3, 4, 4, 5, 3, 4, 4, 5, 4, 5, 5, 6, 1, 2, 2, 3, 2, 3, 3, 4, 2, 3, 3,
4, 3, 4, 4, 5, 2, 3, 3, 4, 3, 4, 4, 5, 3, 4, 4, 5, 4, 5, 5, 6, 2, 3, 3, 4,
3, 4, 4, 5, 3, 4, 4, 5, 4, 5, 5, 6, 3, 4, 4, 5, 4, 5, 5, 6, 4, 5, 5, 6, 5,
6, 6, 7, 1, 2, 2, 3, 2, 3, 3, 4, 2, 3, 3, 4, 3, 4, 4, 5, 2, 3, 3, 4, 3, 4,
4, 5, 3, 4, 4, 5, 4, 5, 5, 6, 2, 3, 3, 4, 3, 4, 4, 5, 3, 4, 4, 5, 4, 5, 5,
6, 3, 4, 4, 5, 4, 5, 5, 6, 4, 5, 5, 6, 5, 6, 6, 7, 2, 3, 3, 4, 3, 4, 4, 5,
3, 4, 4, 5, 4, 5, 5, 6, 3, 4, 4, 5, 4, 5, 5, 6, 4, 5, 5, 6, 5, 6, 6, 7, 3,
4, 4, 5, 4, 5, 5, 6, 4, 5, 5, 6, 5, 6, 6, 7, 4, 5, 5, 6, 5, 6, 6, 7, 5, 6,
6, 7, 6, 7, 7, 8};
size_t size = _bit.size();
size_t count = 0;
for(size_t i = 0; i < size; ++i)
{
int value = _bit[i];
int j = 0;
while(j < sizeof(_bit[0]))
{
unsigned char c = value;
count += bitCntTable[c];
++j;
value >>= 8;
}
}
return count;
}
private:
vector<int> _bit;
size_t _bitCount;
}
5.1.3 位图的应用
- 快速查找某个数据是否在一个集合中
- 排序 + 去重
- 求两个集合的交集、并集等
- 操作系统中磁盘块标记
5.2 布隆过滤器
5.2.1 布隆过滤器提出
我们在使用新闻客户端看新闻时,它会给我们不停地推荐新的内容,它每次推荐时要去重,去掉
那些已经看过的内容。问题来了,新闻客户端推荐系统如何实现推送去重的? 用服务器记录了用
户看过的所有历史记录,当推荐系统推荐新闻时会从每个用户的历史记录里进行筛选,过滤掉那
些已经存在的记录。 如何快速查找呢?
- 用哈希表存储用户记录,缺点:浪费空间
- 用位图存储用户记录,缺点:位图一般只能处理整形,如果内容编号是字符串,就无法处理
了。 - 将哈希与位图结合,即布隆过滤器
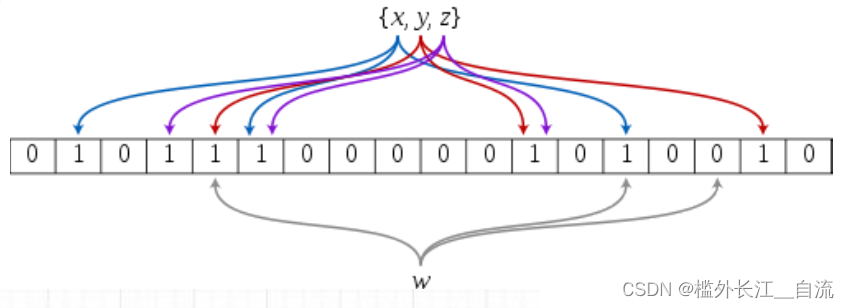
5.2.2布隆过滤器概念
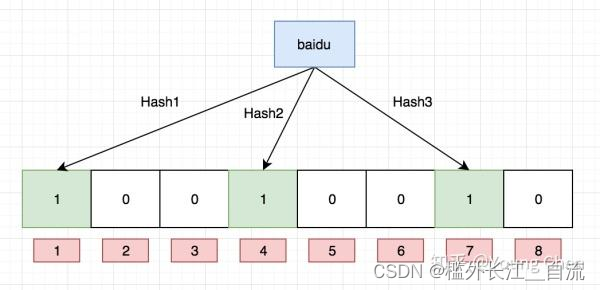
布隆过滤器是由布隆(Burton Howard Bloom)在1970年提出的 一种紧凑型的、比较巧妙的概率型数据结构,特点是高效地插入和查询,可以用来告诉你 “某样东西一定不存在或者可能存在”,它是用多个哈希函数,将一个数据映射到位图结构中。此种方式不仅可以提升查询效率,也可以节省大量的内存空间。
布隆过滤器讲解
5.2.3 布隆过滤器的插入
向布隆过滤器中插入:“baidu”
struct BKDRHash
{
size_t operator()(const string& s)
{
// BKDR
size_t value = 0;
for (auto ch : s)
{
value *= 31;
value += ch;
}
return value;
}
};
struct APHash
{
size_t operator()(const string& s)
{
size_t hash = 0;
for (long i = 0; i < s.size(); i++)
{
if ((i & 1) == 0)
{
hash ^= ((hash << 7) ^ s[i] ^ (hash >> 3));
}
else
{
hash ^= (~((hash << 11) ^ s[i] ^ (hash >> 5)));
}
}
return hash;
}
};
struct DJBHash
{
size_t operator()(const string& s)
{
size_t hash = 5381;
for (auto ch : s)
{
hash += (hash << 5) + ch;
}
return hash;
}
};
template<size_t N,
size_t X = 5,
class K = string,
class HashFunc1 = BKDRHash,
class HashFunc2 = APHash,
class HashFunc3 = DJBHash>
class BloomFilter
{
public:
void Set(const K& key)
{
size_t len = X*N;
size_t index1 = HashFunc1()(key) % len;
size_t index2 = HashFunc2()(key) % len;
size_t index3 = HashFunc3()(key) % len;
/* cout << index1 << endl;
cout << index2 << endl;
cout << index3 << endl<<endl;*/
_bs.set(index1);
_bs.set(index2);
_bs.set(index3);
}
bool Test(const K& key)
{
size_t len = X*N;
size_t index1 = HashFunc1()(key) % len;
if (_bs.test(index1) == false)
return false;
size_t index2 = HashFunc2()(key) % len;
if (_bs.test(index2) == false)
return false;
size_t index3 = HashFunc3()(key) % len;
if (_bs.test(index3) == false)
return false;
return true; // 存在误判的
}
// 不支持删除,删除可能会影响其他值。
void Reset(const K& key);
private:
bitset<X*N> _bs;
};
5.2.4 布隆过滤器的查找
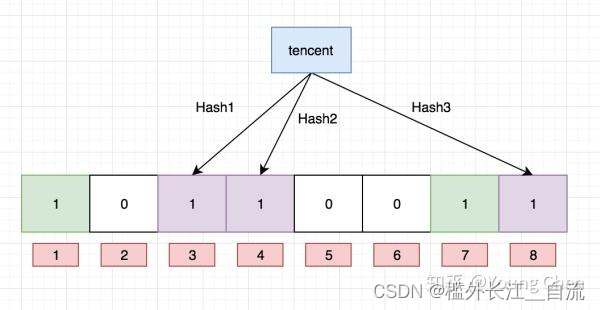
布隆过滤器的思想是将一个元素用多个哈希函数映射到一个位图中,因此被映射到的位置的比特位一定为1。所以可以按照以下方式进行查找:分别计算每个哈希值对应的比特位置存储的是否为零,只要有一个为零,代表该元素一定不在哈希表中,否则可能在哈希表中。注意:布隆过滤器如果说某个元素不存在时,该元素一定不存在,如果该元素存在时,该元素可能存在,因为有些哈希函数存在一定的误判。比如:在布隆过滤器中查找"alibaba"时,假设3个哈希函数计算的哈希值为:1、3、7,刚好和其他元素的比特位重叠,此时布隆过滤器告诉该元素存在,但实该元素是不存在的。
5.2.5 布隆过滤器删除
布隆过滤器不能直接支持删除工作,因为在删除一个元素时,可能会影响其他元素。
比如:删除上图中"tencent"元素,如果直接将该元素所对应的二进制比特位置0,“baidu”元素也
被删除了,因为这两个元素在多个哈希函数计算出的比特位上刚好有重叠。
一种支持删除的方法:将布隆过滤器中的每个比特位扩展成一个小的计数器,插入元素时给k个计
数器(k个哈希函数计算出的哈希地址)加一,删除元素时,给k个计数器减一,通过多占用几倍存储
空间的代价来增加删除操作。
缺陷:
- 无法确认元素是否真正在布隆过滤器中
- 存在计数回绕
5.2.6 布隆过滤器优点
- 增加和查询元素的时间复杂度为:O(K), (K为哈希函数的个数,一般比较小),与数据量大小无
关 - 哈希函数相互之间没有关系,方便硬件并行运算
- 布隆过滤器不需要存储元素本身,在某些对保密要求比较严格的场合有很大优势
- 在能够承受一定的误判时,布隆过滤器比其他数据结构有这很大的空间优势
- 数据量很大时,布隆过滤器可以表示全集,其他数据结构不能
- 使用同一组散列函数的布隆过滤器可以进行交、并、差运算
5.2.7 布隆过滤器缺陷
- 有误判率,即存在假阳性(False Position),即不能准确判断元素是否在集合中(补救方法:再
建立一个白名单,存储可能会误判的数据) - 不能获取元素本身
- 一般情况下
不能从布隆过滤器中删除元素 - 如果采用计数方式删除,可能会存在计数回绕问题

![SHCTF 山河CTF Reverse方向[Week1]全WP 详解](https://img-blog.csdnimg.cn/2d40c31e10b54238b566420c750bb564.png)