Linux版本号4.1.15 芯片I.MX6ULL 大叔学Linux 品人间百味 思文短情长
为方便和上一节的衔接,在正式开始学习前,先把本节的思维导图引入:

二、阻塞IO实验
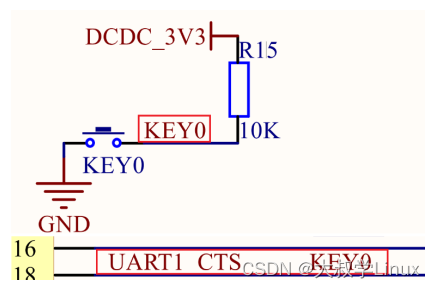
1.硬件原理图分析
2.实验程序
#define IMX6UIRQ_NAME "blockio" /* 名字 */
//修改设备文件名字为“blockio”,当驱动程序加载成功以后就会在根文件系统中出现一个名为“/dev/blockio”的文件。wait_queue_head_t r_wait; /* 读等待队列头 */
//在设备结构体中添加一个等待队列头 r_wait,因为在 Linux 驱动中处理阻塞 IO需要用到等待队列。/* 唤醒进程 */
if(atomic_read(&dev->releasekey)) { /* 完成一次按键过程 */
/* wake_up(&dev->r_wait); */
wake_up_interruptible(&dev->r_wait);
}
//定时器中断处理函数执行,表示有按键按下,先在 107 行判断一下是否是一次有效的按键,如果是的话就通过 wake_up 或者 wake_up_interruptible 函数来唤醒等待队列r_wait。/* 初始化等待队列头 */
init_waitqueue_head(&imx6uirq.r_wait);//采用等待事件来处理 read 的阻塞访问, wait_event_interruptible 函数等待
//releasekey 有效,也就是有按键按下。如果按键没有按下的话进程就会进入休眠状态,因为采用
//了 wait_event_interruptible 函数,因此进入休眠态的进程可以被信号打断。
200 #if 0
201 /* 加入等待队列,等待被唤醒,也就是有按键按下 */
202 ret = wait_event_interruptible(dev->r_wait,
atomic_read(&dev->releasekey));
203 if (ret) {
204 goto wait_error;
205 }
206 #endif208 DECLARE_WAITQUEUE(wait, current); /* 定义一个等待队列 */
209 if(atomic_read(&dev->releasekey) == 0) { /* 没有按键按下 */
210 add_wait_queue(&dev->r_wait, &wait); /* 添加到等待队列头 */
211 __set_current_state(TASK_INTERRUPTIBLE);/* 设置任务状态 */
212 schedule(); /* 进行一次任务切换 */
213 if(signal_pending(current)) { /* 判断是否为信号引起的唤醒 */
214 ret = -ERESTARTSYS;
215 goto wait_error;
216 }
217 __set_current_state(TASK_RUNNING); /*设置为运行状态 */
218 remove_wait_queue(&dev->r_wait, &wait); /*将等待队列移除 */
首先使用 DECLARE_WAITQUEUE 宏定义一个等待队列,如果没有按键按下的话就使用 add_wait_queue 函数将当前任务的等待队列添加到等待队列头 r_wait 中。随后调用__set_current_state 函数设置当前进程的状态为 TASK_INTERRUPTIBLE,也就是可以被信
号打断。接下来调用 schedule 函数进行一次任务切换,当前进程就会进入到休眠态。如果有按
键按下,那么进入休眠态的进程就会唤醒,然后接着从休眠点开始运行。在这里也就是从第 213
行开始运行,首先通过 signal_pending 函数判断一下进程是不是由信号唤醒的,如果是由信号
唤醒的话就直接返回-ERESTARTSYS 这个错误码。如果不是由信号唤醒的(也就是被按键唤醒
的)那么就在 217 行调用__set_current_state 函数将任务状态设置为 TASK_RUNNING,然后在
218 行调用 remove_wait_queue 函数将进程从等待队列中删除。
3.运行测试
1)、编译驱动程序和测试APP
①、编译驱动程序
1 KERNELDIR := /home/zuozhongkai/linux/IMX6ULL/linux/temp/linux-imxrel_imx_4.1.15_2.1.0_ga_alientek
......
4 obj-m := blockio.o//修改变量的值
......
11 clean:
12 $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) cleanmake -j32
编译成功以后就会生成一个名为“blockio.ko”的驱动模块文件。
②、编译测试APP
arm-linux-gnueabihf-gcc blockioApp.c -o blockioApp2)、运行测试
depmod //第一次加载驱动的时候需要运行此命令
modprobe blockio.ko //加载驱动驱动加载成功以后使用如下命令打开 blockioApp 这个测试 APP,并且以后台模式运行:
./blockioApp /dev/blockio &当按下 KEY0 按键以后 blockioApp 这个测试 APP 就会打印出按键值。输入“top”命令,查看 blockioAPP 这个应用 APP 的 CPU 使用率。
使用“kill -9 PID”即可“杀死”指定 PID 的进程,例如杀死149进程命令为:kill -9 149
三、非阻塞IO实验
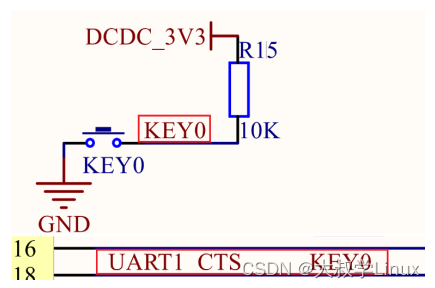
1.硬件原理图分析
2.实验程序
1)、驱动程序编写
#define IMX6UIRQ_NAME "noblockio" /* 名字 */
//修改设备文件名字为“noblockio”,当驱动程序加载成功以后就会在根文件系统
//中出现一个名为“/dev/noblockio”的文件。 if (filp->f_flags & O_NONBLOCK) { /* 非阻塞访问 */
if(atomic_read(&dev->releasekey) == 0) /* 没有按键按下 */
return -EAGAIN;判断是否为非阻塞式读取访问,如果是的话就判断按键是否有效,也就是判断一下有没有按键按下,如果没有的话就返回-EAGAIN。
235 /*
236 * @description : poll 函数,用于处理非阻塞访问
237 * @param - filp : 要打开的设备文件(文件描述符)
238 * @param - wait : 等待列表(poll_table)
239 * @return : 设备或者资源状态,
240 */
241 unsigned int imx6uirq_poll(struct file *filp,
struct poll_table_struct *wait)
242 {
243 unsigned int mask = 0;
244 struct imx6uirq_dev *dev = (struct imx6uirq_dev *)
filp->private_data;
245
246 poll_wait(filp, &dev->r_wait, wait);
247
248 if(atomic_read(&dev->releasekey)) { /* 按键按下 */
249 mask = POLLIN | POLLRDNORM; /* 返回 PLLIN */
250 }
251 return mask;
252 }imx6uirq_poll 函数就是 file_operations 驱动操作集中的 poll 函数,当应用程序调用 select 或者 poll 函数的时候 imx6uirq_poll 函数就会执行。第 246 行调用 poll_wait 函数将等待队列头添加到 poll_table 中,第 248~250 行判断按键是否有效,如果按键有效的话就向应用程序返回 POLLIN 这个事件,表示有数据可以读取。
.poll = imx6uirq_poll,//设置 file_operations 的 poll 成员变量为 imx6uirq_poll。2)、测试APP编写
52 #if 0
53 /* 构造结构体 */
54 fds.fd = fd;
55 fds.events = POLLIN;
56
57 while (1) {
58 ret = poll(&fds, 1, 500);
59 if (ret) { /* 数据有效 */
60 ret = read(fd, &data, sizeof(data));
61 if(ret < 0) {
62 /* 读取错误 */
63 } else {
64 if(data)
65 printf("key value = %d \r\n", data);
66 }
67 } else if (ret == 0) { /* 超时 */
68 /* 用户自定义超时处理 */
69 } else if (ret < 0) { /* 错误 */
70 /* 用户自定义错误处理 */
71 }
72 }
73 #endif使用 poll 函数来实现非阻塞访问。
75 while (1) {
76 FD_ZERO(&readfds);
77 FD_SET(fd, &readfds);
78 /* 构造超时时间 */
79 timeout.tv_sec = 0;
80 timeout.tv_usec = 500000; /* 500ms */
81 ret = select(fd + 1, &readfds, NULL, NULL, &timeout);
82 switch (ret) {
83 case 0: /* 超时 */
84 /* 用户自定义超时处理 */
85 break;
86 case -1: /* 错误 */
87 /* 用户自定义错误处理 */
88 break;
89 default: /* 可以读取数据 */
90 if(FD_ISSET(fd, &readfds)) {
91 ret = read(fd, &data, sizeof(data));
92 if (ret < 0) {
93 /* 读取错误 */
94 } else {
95 if (data)
96 printf("key value=%d\r\n", data);
97 }
98 }
99 break;
100 }
101 }使用 select 函数来实现非阻塞访问。
3.运行测试
1)、编译驱动程序和测试APP
①、编译驱动程序
obj-m := noblockio.omake -j32编译成功以后就会生成一个名为“noblockio.ko”的驱动模块文件。
②、编译测试APP
arm-linux-gnueabihf-gcc noblockioApp.c -o noblockioApp编译成功以后就会生成 noblcokioApp 这个应用程序。
2)、运行测试
depmod //第一次加载驱动的时候需要运行此命令
modprobe noblockio.ko //加载驱动驱动加载成功以后使用如下命令打开 noblockioApp 这个测试 APP,并且以后台模式运行:
./noblockioApp /dev/noblockio & 当按下 KEY0 按键以后 noblockioApp 这个测试 APP 就会打印出按键值。输入“top”命令,
查看 noblockioAPP 这个应用 APP 的 CPU 使用率。
四、总结
本篇笔记为本节的后半部分,主要内容为阻塞IO和非阻塞IO的驱动开发实现。
本文为参考正点原子开发板配套教程整理而得,仅用于学习交流使用,不得用于商业用途。