原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
文章目录
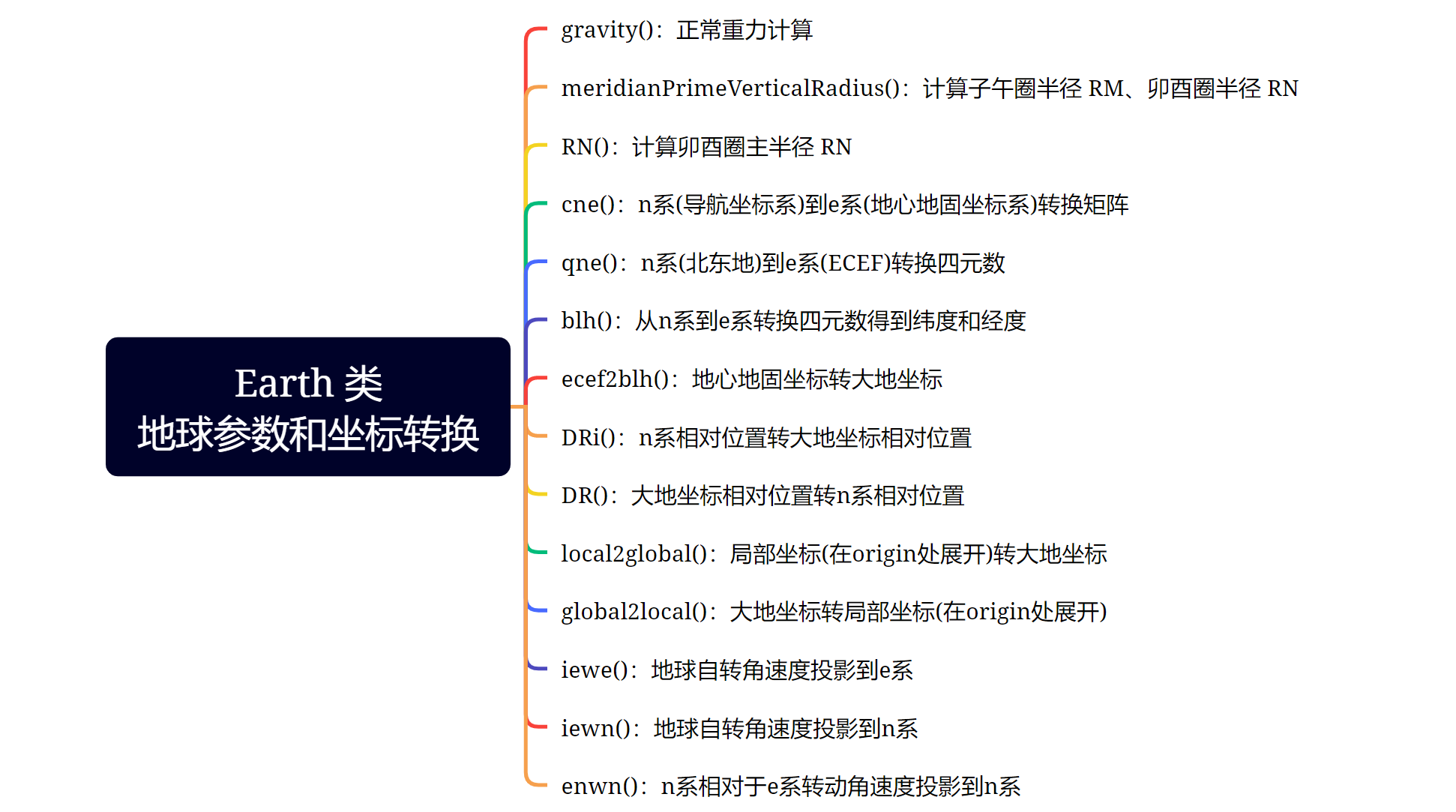
- 一、Earth 类:地球参数和坐标转换
- 1、gravity():正常重力计算
- 2、meridianPrimeVerticalRadius():计算子午圈半径 RM、卯酉圈半径 RN
- 3、RN():计算卯酉圈主半径 RN
- 4、cne():n系(导航坐标系)到e系(地心地固坐标系)转换矩阵
- 5、qne():计算n系(北东地)到e系(ECEF)转换四元数
- 6、blh():从n系到e系转换四元数得到纬度和经度
- 7、blh2ecef():大地坐标(经纬高)转地心地固坐标
- 7、ecef2blh():地心地固坐标转大地坐标
- 8、DRi(): 计算 n 系相对位置转大地坐标相对位置的矩阵
- 9、DR():计算大地坐标相对位置转 n 系相对位置的矩阵
- 10、local2global():局部坐标(在origin处展开)转大地坐标
- 11、global2local():大地坐标转局部坐标(在origin处展开)
- 12、iewe():地球自转角速度投影到e系
- 13、iewn():地球自转角速度投影到n系
- 14、enwn():n系相对于e系转动角速度投影到n系
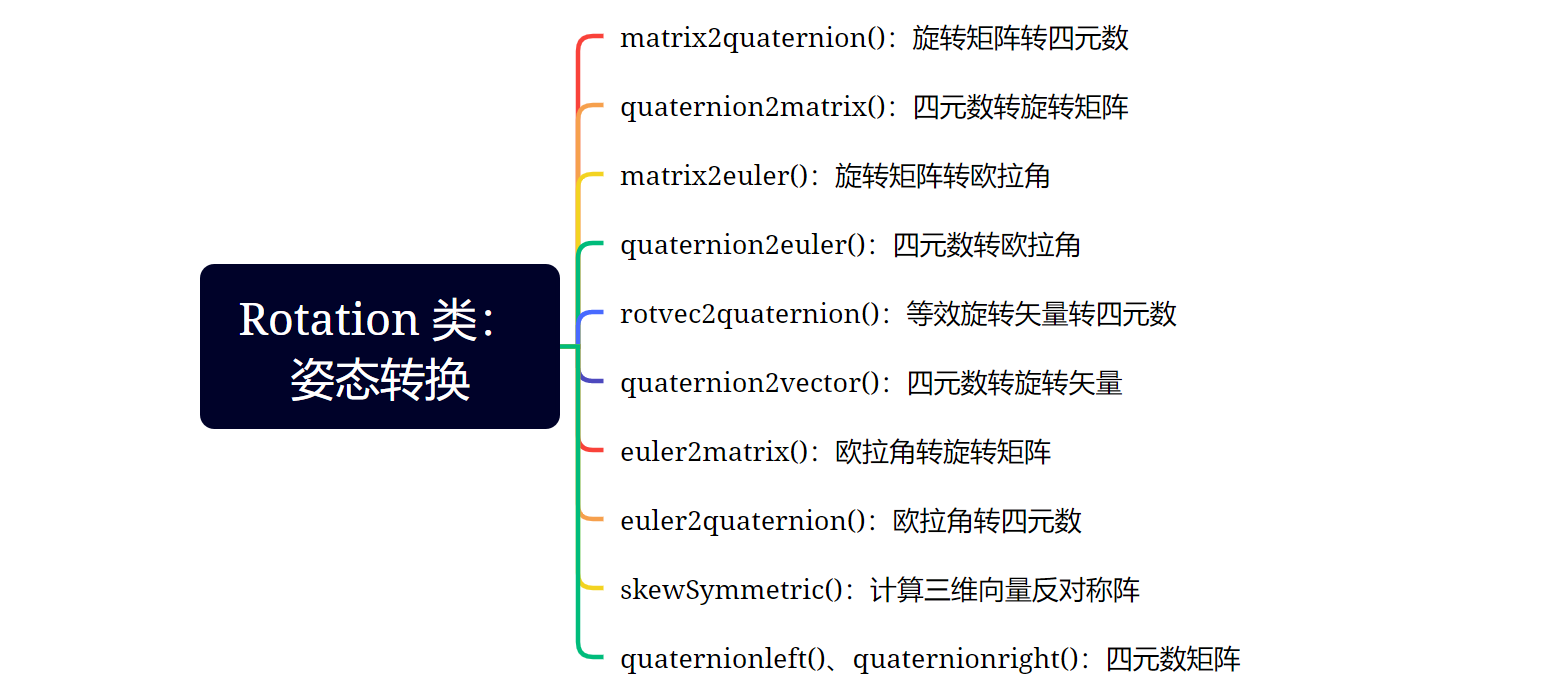
- 二、Rotation 类:姿态转换
- 1、matrix2quaternion():旋转矩阵转四元数
- 2、quaternion2matrix():四元数转旋转矩阵
- 3、matrix2euler():旋转矩阵转欧拉角
- 4、quaternion2euler():四元数转欧拉角
- 5、rotvec2quaternion():等效旋转矢量转四元数
- 6、quaternion2vector():四元数转旋转矢量
- 7、euler2matrix():欧拉角转旋转矩阵
- 8、euler2quaternion():欧拉角转四元数
- 9、skewSymmetric():计算三维向量反对称阵
- 10、quaternionleft()、quaternionright():四元数矩阵
一、Earth 类:地球参数和坐标转换
Earth 类里都是静态函数,使用的时候直接类名::成员函数(),文件的开头定义了一些椭球参数:
/* WGS84椭球模型参数
NOTE:如果使用其他椭球模型需要修改椭球参数 */
const double WGS84_WIE = 7.2921151467E-5; /* 地球自转角速度*/
const double WGS84_F = 0.0033528106647474805; /* 扁率 */
const double WGS84_RA = 6378137.0000000000; /* 长半轴a */
const double WGS84_RB = 6356752.3142451793; /* 短半轴b */
const double WGS84_GM0 = 398600441800000.00; /* 地球引力常数 */
const double WGS84_E1 = 0.0066943799901413156; /* 第一偏心率平方 */
const double WGS84_E2 = 0.0067394967422764341; /* 第二偏心率平方 */
1、gravity():正常重力计算
重力是万有引力与离心力共同作用的结果,随纬度升高离心力增大但引力减小、随高程升高引力减小,共同作用下重力的计算公式如下:
g L = 9.7803267715 × ( 1 + 0.0052790414 × sin 2 L − 0.0000232718 × sin 2 2 L ) + h × ( 0.0000000043977311 × sin 2 L − 0.0000030876910891 ) + 0.0000000000007211 × sin 4 2 L g_{L}=9.7803267715 \times\left(1+0.0052790414 \times \sin ^{2} L-0.0000232718 \times \sin ^{2} 2 L\right) \\ +h\times(0.0000000043977311\times\sin ^{2} L-0.0000030876910891)+0.0000000000007211\times\sin ^{4} 2 L gL=9.7803267715×(1+0.0052790414×sin2L−0.0000232718×sin22L)+h×(0.0000000043977311×sin2L−0.0000030876910891)+0.0000000000007211×sin42L
static double gravity(const Vector3d &blh) {
double sin2 = sin(blh[0]);
sin2 *= sin2;
return 9.7803267715 * (1 + 0.0052790414 * sin2 + 0.0000232718 * sin2 * sin2) +
blh[2] * (0.0000000043977311 * sin2 - 0.0000030876910891) + 0.0000000000007211 * blh[2] * blh[2];
}
2、meridianPrimeVerticalRadius():计算子午圈半径 RM、卯酉圈半径 RN
返回值是 Vector2d,第一个是子午圈主曲率半径 RM、第二个是卯酉圈主半径 RN:
R
M
=
R
e
(
1
−
e
2
)
(
1
−
e
2
sin
2
L
)
3
/
2
、
R
N
=
R
e
1
−
e
2
sin
2
L
R_{M}=\frac{R_{e}\left(1-e^{2}\right)}{\left(1-e^{2} \sin ^{2} L\right)^{3 / 2}}、R_{N}=\frac{R_{e}}{\sqrt{1-e^{2} \sin ^{2} L}}
RM=(1−e2sin2L)3/2Re(1−e2)、RN=1−e2sin2LRe
static Eigen::Vector2d meridianPrimeVerticalRadius(double lat) {
double tmp, sqrttmp;
tmp = sin(lat);
tmp *= tmp;
tmp = 1 - WGS84_E1 * tmp;
sqrttmp = sqrt(tmp);
return {WGS84_RA * (1 - WGS84_E1) / (sqrttmp * tmp), WGS84_RA / sqrttmp};
}
3、RN():计算卯酉圈主半径 RN
R N = R e 1 − e 2 sin 2 L R_{N}=\frac{R_{e}}{\sqrt{1-e^{2} \sin ^{2} L}} RN=1−e2sin2LRe
static double RN(double lat) {
double sinlat = sin(lat);
return WGS84_RA / sqrt(1.0 - WGS84_E1 * sinlat * sinlat);
}
4、cne():n系(导航坐标系)到e系(地心地固坐标系)转换矩阵
C e n = [ − sin φ 0 cos φ 0 1 0 − cos φ 0 − sin φ ] [ cos λ sin λ 0 − sin λ cos λ 0 0 0 1 ] = [ − sin φ cos λ − sin φ sin λ cos φ − sin λ cos λ 0 − cos φ cos λ − cos φ sin λ − sin φ ] C_{e}^{n}=\left[\begin{array}{ccc}-\sin \varphi & 0 & \cos \varphi \\ 0 & 1 & 0 \\ -\cos \varphi & 0 & -\sin \varphi\end{array}\right]\left[\begin{array}{ccc}\cos \lambda & \sin \lambda & 0 \\ -\sin \lambda & \cos \lambda & 0 \\ 0 & 0 & 1\end{array}\right]=\\ \left[\begin{array}{ccc}-\sin \varphi \cos \lambda & -\sin \varphi \sin \lambda & \cos \varphi \\ -\sin \lambda & \cos \lambda & 0 \\ -\cos \varphi \cos \lambda & -\cos \varphi \sin \lambda & -\sin \varphi\end{array}\right] Cen= −sinφ0−cosφ010cosφ0−sinφ cosλ−sinλ0sinλcosλ0001 = −sinφcosλ−sinλ−cosφcosλ−sinφsinλcosλ−cosφsinλcosφ0−sinφ
static Matrix3d cne(const Vector3d &blh) {
double coslon, sinlon, coslat, sinlat;
sinlat = sin(blh[0]);
sinlon = sin(blh[1]);
coslat = cos(blh[0]);
coslon = cos(blh[1]);
Matrix3d dcm;
dcm(0, 0) = -sinlat * coslon;
dcm(0, 1) = -sinlon;
dcm(0, 2) = -coslat * coslon;
dcm(1, 0) = -sinlat * sinlon;
dcm(1, 1) = coslon;
dcm(1, 2) = -coslat * sinlon;
dcm(2, 0) = coslat;
dcm(2, 1) = 0;
dcm(2, 2) = -sinlat;
return dcm;
}
5、qne():计算n系(北东地)到e系(ECEF)转换四元数
位置更新的时候,调用此函数根据上一时刻经纬度,得到上一时刻的 qne,然后 qee * qne * qnn 得到当前时刻的 qne,再调用下面的 blh() 得到经纬度。
q
n
e
=
[
cos
(
−
π
/
4
−
φ
/
2
)
cos
(
λ
/
2
)
−
sin
(
−
π
/
4
−
φ
/
2
)
sin
(
λ
/
2
)
sin
(
−
π
/
4
−
φ
/
2
)
cos
(
λ
/
2
)
cos
(
−
π
/
4
−
sin
/
2
)
sin
(
λ
/
2
)
]
]
\boldsymbol{q}_{n}^{e}=\left[\begin{array}{c}\cos (-\pi / 4-\varphi / 2) \cos (\lambda / 2) \\ -\sin (-\pi / 4-\varphi / 2) \sin (\lambda / 2) \\ \sin (-\pi / 4-\varphi / 2) \cos (\lambda / 2) \\ \cos (-\pi / 4-\sin / 2) \sin (\lambda / 2)]\end{array}\right]
qne=
cos(−π/4−φ/2)cos(λ/2)−sin(−π/4−φ/2)sin(λ/2)sin(−π/4−φ/2)cos(λ/2)cos(−π/4−sin/2)sin(λ/2)]
/* n系(导航坐标系)到e系(地心地固坐标系)转换四元数 */
static Quaterniond qne(const Vector3d &blh) {
Quaterniond quat;
double coslon, sinlon, coslat, sinlat;
coslon = cos(blh[1] * 0.5);
sinlon = sin(blh[1] * 0.5);
coslat = cos(-M_PI * 0.25 - blh[0] * 0.5);
sinlat = sin(-M_PI * 0.25 - blh[0] * 0.5);
quat.w() = coslat * coslon;
quat.x() = -sinlat * sinlon;
quat.y() = sinlat * coslon;
quat.z() = coslat * sinlon;
return quat;
}
6、blh():从n系到e系转换四元数得到纬度和经度
位置更新的时候,通过算当前时刻 n 系到 e 系转换四元数 qne,然后调用此函数得到经纬度。
/* 从n系到e系转换四元数得到纬度和经度 */
static Vector3d blh(const Quaterniond &qne, double height) {
return {-2 * atan(qne.y() / qne.w()) - M_PI * 0.5, 2 * atan2(qne.z(), qne.w()), height};
}
7、blh2ecef():大地坐标(经纬高)转地心地固坐标
x = ( R N + h ) cos L cos λ y = ( R N + h ) cos L sin λ z = [ R N ( 1 − e 2 ) + h ] sin L \begin{array}{l}x=\left(R_{N}+h\right) \cos L \cos \lambda \\ y=\left(R_{N}+h\right) \cos L \sin \lambda \\ z=\left[R_{N}\left(1-e^{2}\right)+h\right] \sin L\end{array} x=(RN+h)cosLcosλy=(RN+h)cosLsinλz=[RN(1−e2)+h]sinL
/* 大地坐标(纬度、经度和高程)转地心地固坐标 */
static Vector3d blh2ecef(const Vector3d &blh) {
double coslat, sinlat, coslon, sinlon;
double rnh, rn;
coslat = cos(blh[0]);
sinlat = sin(blh[0]);
coslon = cos(blh[1]);
sinlon = sin(blh[1]);
rn = RN(blh[0]);
rnh = rn + blh[2];
return {rnh * coslat * coslon, rnh * coslat * sinlon, (rnh - rn * WGS84_E1) * sinlat};
}
7、ecef2blh():地心地固坐标转大地坐标
B 0 = arctan ( Z ( 1 − e 2 ) p ) N k = a 1 − e 2 sin 2 B k − 1 H k = p cos B k − 1 − N k B k = arctan ( z ( 1 − e 2 N k N k ) p ) \begin{array}{c}B_{0}=\arctan \left(\frac{Z}{\left(1-e^{2}\right) p}\right) \\ N_{k}=\frac{a}{\sqrt{1-e^{2} \sin ^{2} B_{k-1}}} \\ H_{k}=\frac{p}{\cos B_{k-1}}-N_{k} \\ B_{k}=\arctan \left(\frac{z}{\left(1-\frac{e^{2} N_{k}}{N_{k}}\right)\ p }\right)\end{array} B0=arctan((1−e2)pZ)Nk=1−e2sin2Bk−1aHk=cosBk−1p−NkBk=arctan (1−Nke2Nk) pz
static Vector3d ecef2blh(const Vector3d &ecef) {
double p = sqrt(ecef[0] * ecef[0] + ecef[1] * ecef[1]);
double rn;
double lat, lon;
double h = 0, h2;
// 初始状态
lat = atan(ecef[2] / (p * (1.0 - WGS84_E1)));
lon = 2.0 * atan2(ecef[1], ecef[0] + p);
do {
h2 = h;
rn = RN(lat);
h = p / cos(lat) - rn;
lat = atan(ecef[2] / (p * (1.0 - WGS84_E1 * rn / (rn + h))));
} while (fabs(h - h2) > 1.0e-4);
return {lat, lon, h};
}
8、DRi(): 计算 n 系相对位置转大地坐标相对位置的矩阵
通过算出来的矩阵实现 ENU 和 LLH 之间的转换:
- 捷联惯导求出的速度是 n 系的,要转成经纬度增量就得用这个矩阵。
- 杆臂误差补偿时也需要用这个函数,因为杆臂是 n 系的,算出的 IMU 坐标和给的 GNSS 解都是经纬高。
- 存的位置是经纬高,GNSS 量测更新时候计算的是 ENU 下位置的增量,反馈的时候也需要此矩阵。
[ δ φ δ L δ H ] = [ ( R M + H ) − 1 0 0 0 ( R N + H ) − 1 0 0 0 − 1 ] [ δ p N δ p E δ p B ] \left[\begin{array}{l}\delta \varphi \\ \delta L \\ \delta H\end{array}\right]=\left[\begin{array}{ccc}\left(R_{M}+H\right)^{-1} & 0 & 0 \\ 0 & \left(R_{N}+H\right)^{-1} & 0 \\ 0 & 0 & -1 \end{array}\right]\left[\begin{array}{l}\delta \boldsymbol{p}_{N} \\ \delta \boldsymbol{p}_{E} \\ \delta \boldsymbol{p}_{B}\end{array}\right] δφδLδH = (RM+H)−1000(RN+H)−1000−1 δpNδpEδpB
/* n系相对位置转大地坐标相对位置 */
static Matrix3d DRi(const Vector3d &blh) {
Matrix3d dri = Matrix3d::Zero();
Eigen::Vector2d rmn = meridianPrimeVerticalRadius(blh[0]);
dri(0, 0) = 1.0 / (rmn[0] + blh[2]);
dri(1, 1) = 1.0 / ((rmn[1] + blh[2]) * cos(blh[0]));
dri(2, 2) = -1;
return dri;
}
9、DR():计算大地坐标相对位置转 n 系相对位置的矩阵
就是上面 DRI() 计算矩阵的倒数。
[
δ
φ
δ
L
δ
H
]
=
[
(
R
M
+
H
)
0
0
0
(
R
N
+
H
)
0
0
0
−
1
]
[
δ
p
N
δ
p
E
δ
p
B
]
\left[\begin{array}{l}\delta \varphi \\ \delta L \\ \delta H\end{array}\right]=\left[\begin{array}{ccc}\left(R_{M}+H\right) & 0 & 0 \\ 0 & \left(R_{N}+H\right) & 0 \\ 0 & 0 & -1 \end{array}\right]\left[\begin{array}{l}\delta \boldsymbol{p}_{N} \\ \delta \boldsymbol{p}_{E} \\ \delta \boldsymbol{p}_{B}\end{array}\right]
δφδLδH
=
(RM+H)000(RN+H)000−1
δpNδpEδpB
/* 大地坐标相对位置转n系相对位置 */
static Matrix3d DR(const Vector3d &blh) {
Matrix3d dr = Matrix3d::Zero();
Eigen::Vector2d rmn = meridianPrimeVerticalRadius(blh[0]);
dr(0, 0) = rmn[0] + blh[2];
dr(1, 1) = (rmn[1] + blh[2]) * cos(blh[0]);
dr(2, 2) = -1;
return dr;
}
10、local2global():局部坐标(在origin处展开)转大地坐标
在 enwn() 中被调用,为了方便能直接传入北东地(n 系)坐标计算 n 系相对于 e 系转动角速度在 n 系的投影。
static Vector3d local2global(const Vector3d &origin, const Vector3d &local) {
Vector3d ecef0 = blh2ecef(origin);
Matrix3d cn0e = cne(origin);
Vector3d ecef1 = ecef0 + cn0e * local;
Vector3d blh1 = ecef2blh(ecef1);
return blh1;
}
11、global2local():大地坐标转局部坐标(在origin处展开)
好像整个程序中都没用到这个函数。
static Vector3d global2local(const Vector3d &origin, const Vector3d &global) {
Vector3d ecef0 = blh2ecef(origin);
Matrix3d cn0e = cne(origin);
Vector3d ecef1 = blh2ecef(global);
return cn0e.transpose() * (ecef1 - ecef0);
}
static Pose global2local(const Vector3d &origin, const Pose &global) {
Pose local;
Vector3d ecef0 = blh2ecef(origin);
Matrix3d cn0e = cne(origin);
Vector3d ecef1 = blh2ecef(global.t);
Matrix3d cn1e = cne(global.t);
local.t = cn0e.transpose() * (ecef1 - ecef0);
local.R = cn0e.transpose() * cn1e * global.R;
return local;
}
12、iewe():地球自转角速度投影到e系
ω i e e = [ 0 0 ω e ] T \boldsymbol{\omega}_{i e}^{e}=\left[\begin{array}{lll}0 & 0 & \omega_{e}\end{array}\right]^{T} ωiee=[00ωe]T
static Vector3d iewe() {
return {0, 0, WGS84_WIE};
}
13、iewn():地球自转角速度投影到n系
ω i e n = [ ω e cos φ 0 − ω e sin φ ] T \boldsymbol{\omega}_{i e}^{n}=\left[\begin{array}{lll}\omega_{e} \cos \varphi & 0 & -\omega_{e} \sin \varphi\end{array}\right]^{T} ωien=[ωecosφ0−ωesinφ]T
static Vector3d iewn(double lat) {
return {WGS84_WIE * cos(lat), 0, -WGS84_WIE * sin(lat)};
}
也可以直接传入北东地(n 系)坐标计算:
static Vector3d iewn(const Vector3d &origin, const Vector3d &local) {
Vector3d global = local2global(origin, local);
return iewn(global[0]);
}
14、enwn():n系相对于e系转动角速度投影到n系
由载体运动线速度和地球曲率引起,与东向、北向速度有关,与天向速度无关
ω
e
n
n
=
[
v
E
R
N
+
h
−
v
N
R
M
+
h
−
v
E
tan
φ
R
N
+
h
]
T
\boldsymbol{\omega}_{e n}^{n}=\left[\begin{array}{lll}\frac{v_{E}}{R_{N}+h} & \frac{-v_{N}}{R_{M}+h} & -\frac{v_{E} \tan \varphi}{R_{N}+h}\end{array}\right]^{T}
ωenn=[RN+hvERM+h−vN−RN+hvEtanφ]T
static Vector3d enwn(const Eigen::Vector2d &rmn, const Vector3d &blh, const Vector3d &vel) {
return {vel[1] / (rmn[1] + blh[2]), -vel[0] / (rmn[0] + blh[2]), -vel[1] * tan(blh[0]) / (rmn[1] + blh[2])};
}
同样也可以直接传入北东地(n 系)坐标计算:
static Vector3d enwn(const Vector3d &origin, const Vector3d &local, const Vector3d &vel) {
Vector3d global = local2global(origin, local);
Eigen::Vector2d rmn = meridianPrimeVerticalRadius(global[0]);
return enwn(rmn, global, vel);
}
二、Rotation 类:姿态转换
1、matrix2quaternion():旋转矩阵转四元数
Eigen 中的四元数可以直接传入旋转矩阵(三维矩阵)构造:
static Quaterniond matrix2quaternion(const Matrix3d &matrix) {
return Quaterniond(matrix);
}
2、quaternion2matrix():四元数转旋转矩阵
四元数调用 toRotationMatrix() 函数,转为旋转矩阵:
static Matrix3d quaternion2matrix(const Quaterniond &quaternion) {
return quaternion.toRotationMatrix();
}
3、matrix2euler():旋转矩阵转欧拉角
ZYX 旋转顺序,前右下的 IMU,输出 RPY:
static Vector3d matrix2euler(const Eigen::Matrix3d &dcm) {
Vector3d euler;
euler[1] = atan(-dcm(2, 0) / sqrt(dcm(2, 1) * dcm(2, 1) + dcm(2, 2) * dcm(2, 2)));
if (dcm(2, 0) <= -0.999) {
euler[0] = atan2(dcm(2, 1), dcm(2, 2));
euler[2] = atan2((dcm(1, 2) - dcm(0, 1)), (dcm(0, 2) + dcm(1, 1)));
} else if (dcm(2, 0) >= 0.999) {
euler[0] = atan2(dcm(2, 1), dcm(2, 2));
euler[2] = M_PI + atan2((dcm(1, 2) + dcm(0, 1)), (dcm(0, 2) - dcm(1, 1)));
} else {
euler[0] = atan2(dcm(2, 1), dcm(2, 2));
euler[2] = atan2(dcm(1, 0), dcm(0, 0));
}
// heading 0~2PI
if (euler[2] < 0) {
euler[2] = M_PI * 2 + euler[2];
}
return euler;
}
4、quaternion2euler():四元数转欧拉角
先调用 toRotationMatrix() 转为旋转矩阵,再调用 matrix2euler() 转欧拉角:
static Vector3d quaternion2euler(const Quaterniond &quaternion) {
return matrix2euler(quaternion.toRotationMatrix());
}
5、rotvec2quaternion():等效旋转矢量转四元数
根据传入的旋转矢量,计算向量的长度作为旋转的角度,计算向量的归一化版本作为旋转的轴,然后调用 AngleAxisd(),将角度和轴转换为四元数。
static Quaterniond rotvec2quaternion(const Vector3d &rotvec) {
double angle = rotvec.norm(); // 计算向量的长度作为旋转的角度
Vector3d vec = rotvec.normalized(); // 计算向量的归一化版本作为旋转的轴
return Quaterniond(Eigen::AngleAxisd(angle, vec)); // 调用 AngleAxisd(),将角度和轴转换为四元数
}
6、quaternion2vector():四元数转旋转矢量
传入的四元数通过 Eigen::AngleAxisd 类的构造函数转换为角度轴(angle-axis)表示。角度轴是一个描述旋转的方法,其中旋转角度和旋转轴是两个独立的部分。然后,该函数返回这个角度轴表示的旋转的角度乘以旋转的轴,得到一个三维向量。这个向量的 x、y 和 z 分量分别对应于旋转轴在x、y 和 z 轴上的分量,而其长度(或者说范数)等于旋转角度。
static Vector3d quaternion2vector(const Quaterniond &quaternion) {
Eigen::AngleAxisd axisd(quaternion);
return axisd.angle() * axisd.axis();
}
7、euler2matrix():欧拉角转旋转矩阵
三个欧拉角分别转为 ZYX 角轴,相乘之后构造旋转矩阵
static Matrix3d euler2matrix(const Vector3d &euler) {
return Matrix3d(Eigen::AngleAxisd(euler[2], Vector3d::UnitZ()) *
Eigen::AngleAxisd(euler[1], Vector3d::UnitY()) *
Eigen::AngleAxisd(euler[0], Vector3d::UnitX()));
}
8、euler2quaternion():欧拉角转四元数
三个欧拉角分别转为 ZYX 角轴,相乘之后构造四元数
static Quaterniond euler2quaternion(const Vector3d &euler) {
return Quaterniond(Eigen::AngleAxisd(euler[2], Vector3d::UnitZ()) *
Eigen::AngleAxisd(euler[1], Vector3d::UnitY()) *
Eigen::AngleAxisd(euler[0], Vector3d::UnitX()));
}
9、skewSymmetric():计算三维向量反对称阵
static Matrix3d skewSymmetric(const Vector3d &vector) {
Matrix3d mat;
mat << 0, -vector(2), vector(1), vector(2), 0, -vector(0), -vector(1), vector(0), 0;
return mat;
}
10、quaternionleft()、quaternionright():四元数矩阵
P ∘ Q = [ p 0 − p 1 − p 2 − p 3 p 1 p 0 − p 3 p 2 p 2 p 3 p 0 − p 1 p 3 − p 2 p 1 p 0 ] [ q 0 q 1 q 2 q 3 ] = M P Q = [ q 0 − q 1 − q 2 − q 3 q 1 q 0 q 3 − q 2 q 2 − q 3 q 0 q 1 q 3 q 2 − q 1 q 0 ] [ p 0 p 1 p 2 p 3 ] = M Q ′ P \boldsymbol{P} \circ \boldsymbol{Q}=\left[\begin{array}{cccc}p_{0} & -p_{1} & -p_{2} & -p_{3} \\ p_{1} & p_{0} & -p_{3} & p_{2} \\ p_{2} & p_{3} & p_{0} & -p_{1} \\ p_{3} & -p_{2} & p_{1} & p_{0}\end{array}\right]\left[\begin{array}{l}q_{0} \\ q_{1} \\ q_{2} \\ q_{3}\end{array}\right]=\boldsymbol{M}_{P} \boldsymbol{Q}=\left[\begin{array}{cccc}q_{0} & -q_{1} & -q_{2} & -q_{3} \\ q_{1} & q_{0} & q_{3} & -q_{2} \\ q_{2} & -q_{3} & q_{0} & q_{1} \\ q_{3} & q_{2} & -q_{1} & q_{0}\end{array}\right]\left[\begin{array}{l}p_{0} \\ p_{1} \\ p_{2} \\ p_{3}\end{array}\right]=\boldsymbol{M}_{Q}^{\prime} \boldsymbol{P} P∘Q= p0p1p2p3−p1p0p3−p2−p2−p3p0p1−p3p2−p1p0 q0q1q2q3 =MPQ= q0q1q2q3−q1q0−q3q2−q2q3q0−q1−q3−q2q1q0 p0p1p2p3 =MQ′P
M P = [ p 0 − p 1 − p 2 − p 3 p 1 p 0 − p 3 p 2 p 2 p 3 p 0 − p 1 p 3 − p 2 p 1 p 0 ] = [ p 0 − p v T p v p 0 I + ( p v × ) ] \boldsymbol{M}_{P}=\left[\begin{array}{cccc}p_{0} & -p_{1} & -p_{2} & -p_{3} \\ p_{1} & p_{0} & -p_{3} & p_{2} \\ p_{2} & p_{3} & p_{0} & -p_{1} \\ p_{3} & -p_{2} & p_{1} & p_{0}\end{array}\right]=\left[\begin{array}{cc}p_{0} & -\boldsymbol{p}_{v}^{\mathrm{T}} \\ \boldsymbol{p}_{v} & p_{0} \boldsymbol{I}+\left(\boldsymbol{p}_{v} \times\right)\end{array}\right] MP= p0p1p2p3−p1p0p3−p2−p2−p3p0p1−p3p2−p1p0 =[p0pv−pvTp0I+(pv×)]
static Eigen::Matrix4d quaternionleft(const Quaterniond &q) {
Eigen::Matrix4d ans;
ans(0, 0) = q.w();
ans.block<1, 3>(0, 1) = -q.vec().transpose();
ans.block<3, 1>(1, 0) = q.vec();
ans.block<3, 3>(1, 1) = q.w() * Eigen::Matrix3d::Identity() + skewSymmetric(q.vec());
return ans;
}
M Q ′ = [ q 0 − q 1 − q 2 − q 3 q 1 q 0 q 3 − q 2 q 2 − q 3 q 0 q 1 q 3 q 2 − q 1 q 0 ] = [ q 0 − q v T q v q 0 I − ( q v × ) ] \boldsymbol{M}_{Q}^{\prime}=\left[\begin{array}{cccc}q_{0} & -q_{1} & -q_{2} & -q_{3} \\ q_{1} & q_{0} & q_{3} & -q_{2} \\ q_{2} & -q_{3} & q_{0} & q_{1} \\ q_{3} & q_{2} & -q_{1} & q_{0}\end{array}\right]=\left[\begin{array}{cc}q_{0} & -\boldsymbol{q}_{v}^{\mathrm{T}} \\ \boldsymbol{q}_{v} & q_{0} \boldsymbol{I}-\left(\boldsymbol{q}_{v} \times\right)\end{array}\right] MQ′= q0q1q2q3−q1q0−q3q2−q2q3q0−q1−q3−q2q1q0 =[q0qv−qvTq0I−(qv×)]
static Eigen::Matrix4d quaternionright(const Quaterniond &p) {
Eigen::Matrix4d ans;
ans(0, 0) = p.w();
ans.block<1, 3>(0, 1) = -p.vec().transpose();
ans.block<3, 1>(1, 0) = p.vec();
ans.block<3, 3>(1, 1) = p.w() * Eigen::Matrix3d::Identity() - skewSymmetric(p.vec());
return ans;
}
egin{array}{cc}q_{0} & -\boldsymbol{q}{v}^{\mathrm{T}} \ \boldsymbol{q}{v} & q_{0} \boldsymbol{I}-\left(\boldsymbol{q}_{v} \times\right)\end{array}\right]
$$
static Eigen::Matrix4d quaternionright(const Quaterniond &p) {
Eigen::Matrix4d ans;
ans(0, 0) = p.w();
ans.block<1, 3>(0, 1) = -p.vec().transpose();
ans.block<3, 1>(1, 0) = p.vec();
ans.block<3, 3>(1, 1) = p.w() * Eigen::Matrix3d::Identity() - skewSymmetric(p.vec());
return ans;
}