目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
1.算法运行效果图预览
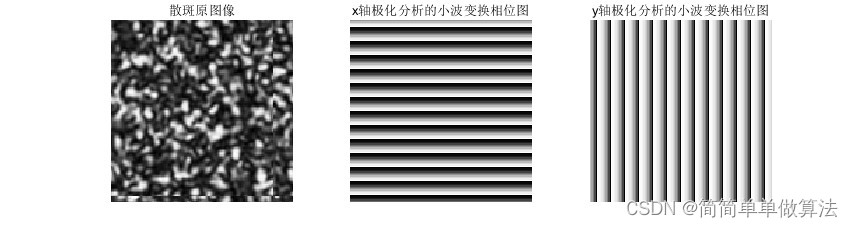
图(1)表示散斑原图像,(2)表示对(1)图像进行x轴方向的极化分析的小波相位图,呈周期的水平条纹,(3)表示对(1)图像进行y轴方向的极化分析的小波相位图,呈周期的竖直条纹。
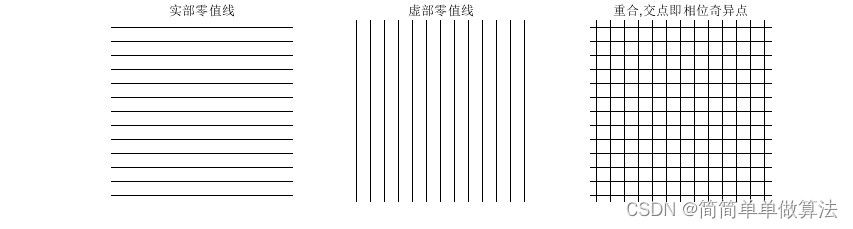
表示相位奇异点图的构造过程,其中(1)表示从上图(2)中提取的实部零值线,(2)表示从上图(3)中提取的虚部零值线,(3)表示(1)和(2)两幅图重合后的图像。
2.算法运行软件版本
matlab2022a
3.部分核心程序
.................................................................
movex = 14;
movey = 4;
es = 6;
k0 = 4;
a = 20;
I0 = imresize(double(rgb2gray(imread('1.jpg'))),[130,130]);
[R,C] = size(I0);
if movex == 0;
I0 = I0;
else
I0 = [I0(:,movex+1:end),I0(:,1:movex)];
I0 = [I0(movey+1:end,:);I0(1:movey,:)];
end
figure;
subplot(131);
imshow(I0,[]);
title('散斑原图像');
axis square;
%x轴方向的极化分析的小波变换相位图计算
Fx = func_fai_base(I0,movex,movey,es,k0,a,'x');
subplot(132);
imshow(Fx,[]);
title('x轴极化分析的小波变换相位图');
axis square;
%y轴方向的极化分析的小波变换相位图计算
Fy = func_fai_base(I0,movex,movey,es,k0,a,'y');
subplot(133);
imshow(Fy,[]);
title('y轴极化分析的小波变换相位图');
axis square;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
F2x = func_findzeros(Fx,'x');
figure;
subplot(131);
imshow(F2x,[]);
title('实部零值线');
F2y = func_findzeros(Fy,'y');
subplot(132);
imshow(F2y,[]);
title('虚部零值线');
%重叠
Fxy = func_chongdie(F2x,F2y);
subplot(133);
imshow(Fxy,[]);
title('重合,交点即相位奇异点');
17_004m4.算法理论概述
面内微位移测量是力学测量中的重要分支,可应用到工程在线检测、精密设备加工、细胞生物测定等各种不同的领域,面内微位移测量技术水平的高低直接影响着各个领域技术水平的发展。散斑是光学中的一种普遍现象,采用散斑图像进行面内微位移测量具有设备简单、非接触等优点,在面内微位移测量中发挥着重要的作用。散斑图像是由于光的干涉和衍射效应在物体表面形成的随机颗粒状纹理。这些散斑图像通常包含大量的噪声和畸变,对于许多图像处理任务来说是一个挑战。基于二维小波变换的散斑相位奇异构造算法利用小波变换的优良特性,对散斑图像进行多尺度分解,从而提取出图像中的相位奇异信息。
二维小波变换是一种有效的图像分析工具,它能够将图像分解为不同的频带,从而在不同的尺度上分析图像的特征。通过小波变换,可以将散斑图像分解为一系列具有不同空间尺度和方向性的子带,这些子带反映了图像在不同尺度上的特征。
采用二维方向小波变换构造新型的、网格均匀的网状相位奇异点图,提出了初步位移和精确位移两步测量的新方法,由初步位移和匹配最邻近奇异点对间的位移计算待测物体的精确位移。基于二维小波变换的散斑相位奇异构造算法的实现过程如下:
- 对输入的散斑图像进行二维小波变换,得到不同尺度和方向上的小波系数。
- 分析小波系数,提取出相位奇异信息。这可以通过计算相位梯度、相位跃变等方法来实现。
- 根据提取出的相位奇异信息,构造出散斑图像的相位奇异图。这个图反映了图像中重要特征的位置和形状。
- 对构造出的相位奇异图进行后处理,例如滤波、增强等,以提高图像的质量和可视化效果。
5.算法完整程序工程
OOOOO
OOO
O