导读:本期主要介绍永磁同步电机复矢量电流调节器。针对内置式永磁同步电机d、q轴电流存在动态耦合的问题,在基于有效磁链概念得到IPMSM的复矢量数学模型,设计出相应的复矢量电流调节器,实现了d、q轴电流的动态解耦。通过仿真验证所实现方法的有效性和可行性。
如果需要文章中的仿真模型,关注微信公众号:浅谈电机控制,留言获取。
一、引言
在同步旋转坐标系下,IPMSM的d、q轴电压存在耦合,从而导致d、q轴电流存在动态耦合。随着转速的升高,耦合作用的影响也越来越严重,从而影响电流环的动态性能,严重时甚至会导致系统不稳定。常见的解耦方法包括前馈解耦控制、反馈解耦控制和复矢量解耦控制等。
二、复矢量电流调节器设计
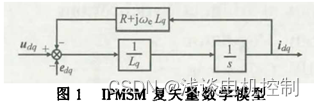
2.1、复矢量电机数学模型
![]()
从上式可知,IPMSM的d、q轴电压存在耦合项,从而导致d、q轴电流存在动态耦合,并且耦合项与转速成正比。由于耦合项的存在,使IPMSM复矢量数学模型中包含一个随转速变化的极点,当电机转速增加时,该极点将远离实轴,系统阻尼降低。
2.2、复矢量电流调节器设计


传统的PI调节器参数整定的依据也是基于零极点对消,在这不做过多介绍。
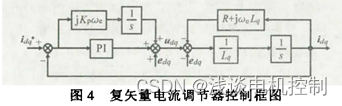
复矢量解耦控制利用零极点对消的原理,通过在电流调节器中增加一个随转速变化的零点来对消永磁同步电机数学模型中随转速变化的极点,以此来消除耦合项的影响。相比于反馈解耦控制,复矢量解耦控制具有更好的动态解耦性能,且在一定程度上提高了整个系统的参数鲁棒性。PI参数选取同上,由图4得到系统的闭环传递函数为:
![]()
三、仿真系统搭建与分析
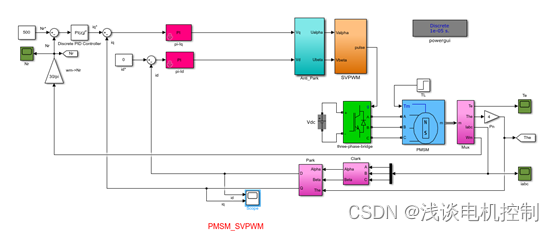
图3-1 基于传统线性PI调节器的IPMSM_FOC

图3-2 基于前馈电压解耦控制的IPMSM_FOC

图3-3 基于复矢量P电流调节器的IPMSM_FOC

(a)传统线性PI调节器
(b)前馈电压解耦控制
(c)复矢量P电流调节器
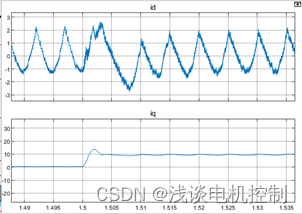
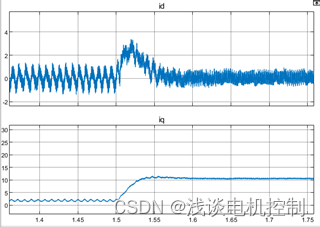
图3-4 不同控制下的d、q轴电流变化情况
从图(3-4)中对比可以发现,电机转速较高时,当q轴电流发生阶跃变化时,传统PI电流调节器d、q轴存在较大耦合且有较大的超调,动态响应较慢。相比之下,复矢量电流调节器能够很好的消除d、q轴电流的动态耦合和电流超调,具有更好的动态性能。
四、总结
内置式永磁同步电机因d、q轴电感不相等,所以很少有复矢量解耦控制的介绍。基于有效磁链的概念推导了内置式永磁同步电机的复矢量数学模型,并对比分析了传统PI电流调节器和复矢量电流调节器的控制性能。仿真结果证明复矢量电流调节器具有很好的d、q轴电流动态解耦效果和动态响应性能,更有利于实现内置式永磁同步电机的高性能控制。