CM CANopen模块简介
CM CANopen模块(Profinet转CANopen)来自瑞典HMS ,由西 门子授权HMS公司开发,与S7-1200完美兼容。
可做为S7-1200与CANopen/CAN设备之间的桥梁,能够联接任意 CANopen或CAN 2.0A设备到SIMATIC S7-1200 PLC
支持过程数据(PDO)通信,也支持服务数据(SDO)通信
每个CM CANopen模块最多支持16个从站

S7-1200+CM CANopen模块方案优点
S7-1200 CPU模块最多可扩展3个CM CANopen模块,整个系统可 以轻松控制多达48轴,非常适合多轴运动控制。
CANopen总线应用广泛,比脉冲模式可靠性更高。
总线控制接线简单,扩展灵活,大大缩短开发成本
相比较于Profinet通讯CANopen从站的可选择性更广,性价比 更高

CM CANopen模块与FD进行PDO通信
1. CM CANopen模块;
2. SIMATIC S7-1200(CPU 1214C DC/DC/DC);
3. Kinco Servo FD422;
4. PC;
5. 电源:220V AC, 24V DC;
6. CANopen电缆、网线、USB Mini电缆。
把FD伺服常用的控制对象配置到TPDO、RPDO中,包含了常用 的位置模式、速度模式所需的控制对象。 FD伺服的TPDO如下所示: (伺服发送给PLC) TPDO1:Input Status+Pulse master Frequency+Error Status+Error Status2 TPDO2:statusword + Gear Master Counter TPDO3:position actual value FD伺服的RPDO如下所示: (PLC发送给伺服) RPDO1: modes of operation +Gear Factor+Gear Devider+controlword RPDO2:Max_current+Gear Master Counter RPDO3:Target_position+Home_offset RPDO4:profile velocity+ target velocity
1.建立TIA Portal V13工程,更新硬件支持包(本范例内包含)。如果博途 软件版本低于V13,请到下载地址:http://www.anybus.cn/下载低版本硬件 支持包。

(1)选择需要安装的HSP文件。本例中选择CM CANopen硬件支持包

(2)勾选新加入的HSP文件,点击“安装”。

重新打开TIA Portal项目,查看硬件目录的CM CANopen模块。

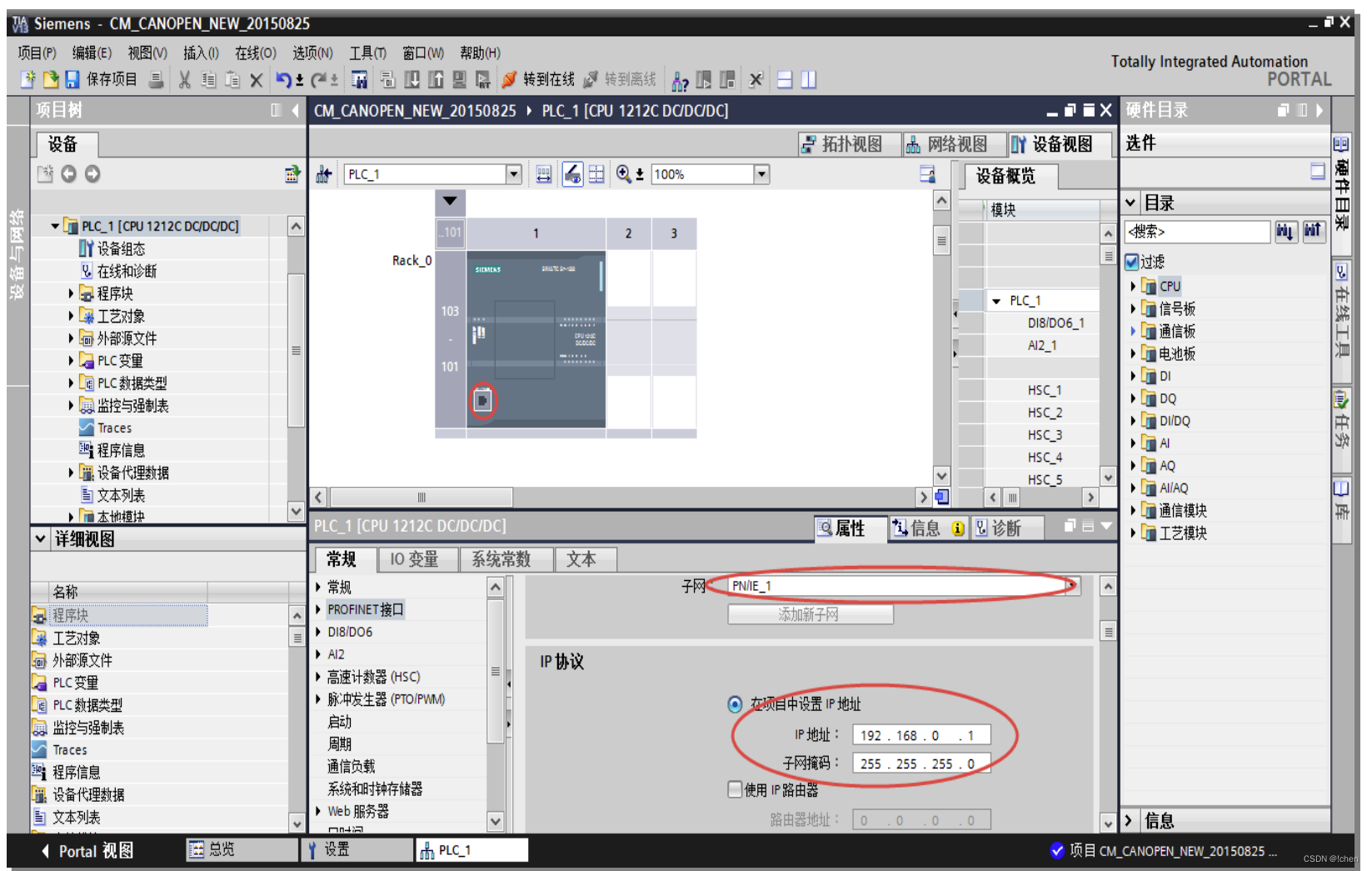
添加S7-1200具体模块进行硬件组态

3.双击以太网口,在“以太网地址”属性中添加新子网,输入IP地址和子网 掩码。
4添加CM CANopen模块
 5.双击CANopen接口,在“Module parameters”属性中编辑节点号、操 作模式、波特率、CANopen输入/输出大小。
5.双击CANopen接口,在“Module parameters”属性中编辑节点号、操 作模式、波特率、CANopen输入/输出大小。

6.至此完成S7-1200 CPU与CANopen模块的硬件组态,连接PC与S7-1200, 点击“下载”S7-1200 CPU。注意必须先下载进去,此时CPU才会识别出 CANopen模块,后面对模块进行设置后下载参数才不会报错


CANopen网络

1.打开KINCO伺服软件KincoServo-联机后,设置FD伺服的设备站号、CANopen 通信波特率。

2.去掉伺服数字I-O输入默认各个功能,根据需要仅可保留正负限位、原点 信号功能,完成伺服参数设置后需要保存伺服控制参数。
 3.打开软件“CM CANopen Configuration Studio 2.0”。点击“File”- “New” ,新建一个工程。选择项目存储路径、CANopen Manager 设备以 及主站Node-ID。
3.打开软件“CM CANopen Configuration Studio 2.0”。点击“File”- “New” ,新建一个工程。选择项目存储路径、CANopen Manager 设备以 及主站Node-ID。

4.点击“OK”后进入到主页面,左侧是预安装的CANopen产品EDS文件列表

5.点击“Tools”-“Manage Catalog” 添加自己所连接KINCO伺服的EDS文件。

6.添加FD从站。①点击“Drivers and Motion”;②左键拖住“Kinco Electric”下定的“Undefined”到Slaves下;③在弹出的窗口中输入从站 名称;④选择从站Node-ID;⑤选择Slaves; ⑥点击“OK”确定。

7.按照红色方框内所示设置从站① Bit-7勾选去掉,否则配置从站PDO配置不 成功;② Restore Configuratio设置成0,否则上电模块会初始化伺服控制 参数;

8.添加FD从站后,点击“Application Objects”,选择FD伺服接收和发 送的Objects。如下所示。本例中所以把所有常用的对象都添 加进去,实际中可根据需要,无需实时数据交换的无需添加。

9.添加所有需要用到的PDO后,点击查看“Process Image”,在这里需要 注意下图红框内各对象对应的输入输出地址

按F5或点击“Build”中“Calculate Configuration”重新计算配置 以将FD伺服的PDO映射到CM CANopen模块中。映射完成后双击主站,查看 主站PDO映射。如下所示:


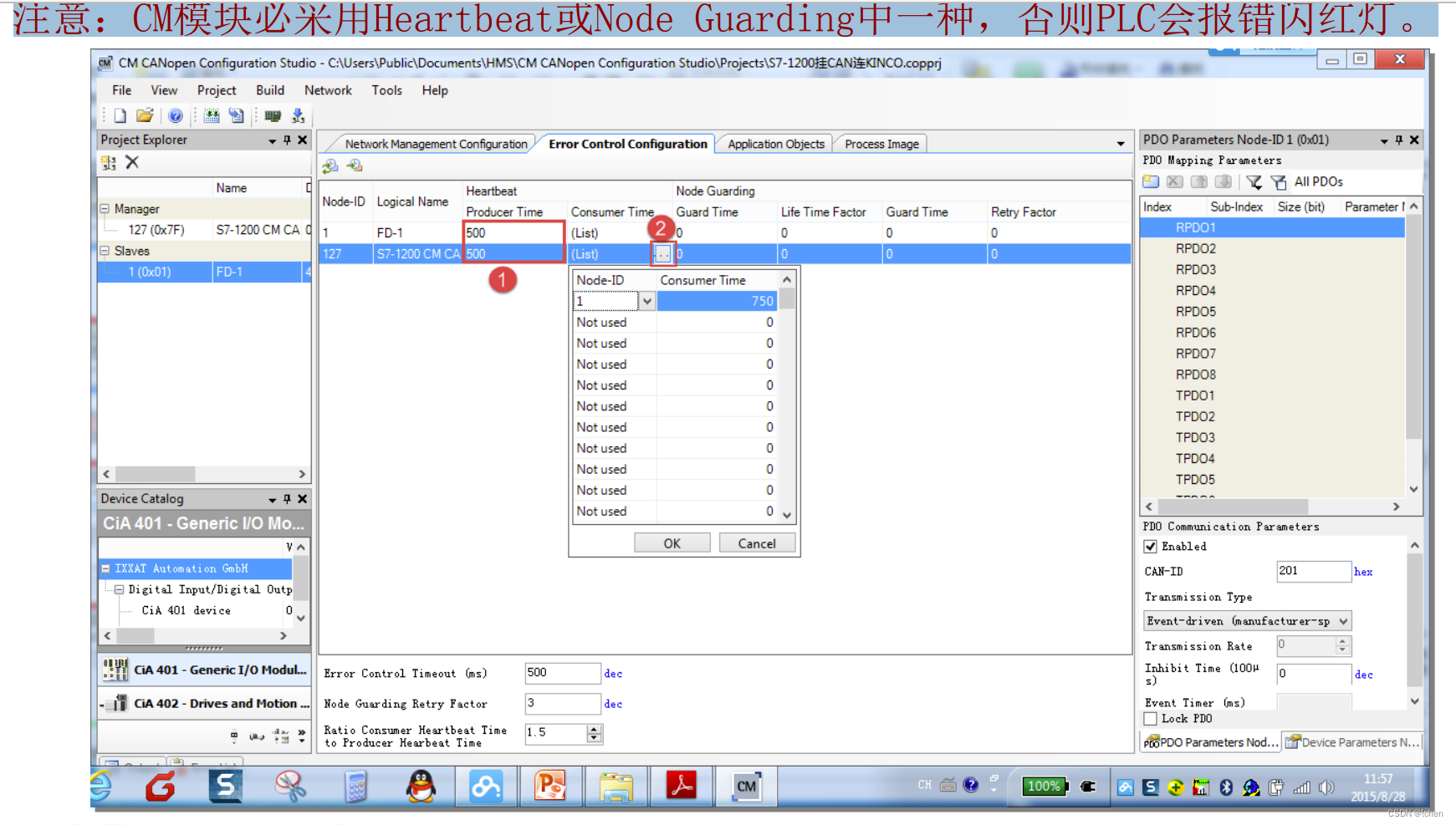
11.点击Error Control Configuration,可设置保护方式。默认为心跳报文 保护,把Producer Time时间修改为0则取消心跳报文;也可采用Node Guarding方式,直接设置Node Guarding下面的Guard Time即可启用。 注意:CM模块必采用Heartbeat或Node Guarding中一种,否则PLC会报错闪红灯。
12.生成配置。按F6或点击“Build”-“Generate Configuration”,选择 配置文件存储路径。