PC-SDK是阿木实验室 (AMOVLAB) 为了简化开源飞控的控制协议MAVLink,优化和维护的一个基于PC电脑运行MAVSDK(支持Windows和Ubuntu)的Python SDK库。
相对于传统的无人机控制开发,开发者无需掌握C/C++语言和ROS等相关知识,只要学会Python编程及懂得坐标系原理,在PC电脑上安装Python环境与功能包模块后,就可以地面端链路控制无人机飞行(开发),极大地降低了开发难度。
MAVSDK简介

添加图片注释,不超过 140 字(可选)
MAVSDK是各种编程语言的库集合,用于与无人机、摄像机或地面系统等MAVLink系统进行交互。这些库提供了一个简单的API,用于管理一个或多个车辆,提供对车辆信息和遥测的编程访问,以及对任务,移动和其他操作的控制。这些库可以在配套计算机上的无人机上使用,也可以在地面站或移动设备上使用。
MAVSDK的特点
跨平台
Linux、macOS、Windows、Android 和 iOS等。
多语言
C++、Swift、Python、Java、Go、JavaScript、CSharp、Rust等。
在使用时可以通过串口或者tcp或者udp建立连接然后就可以控制Pixhawk飞控。在此之前可以在Ubuntu下建立Pixhawk的源码然后并创建模拟器,然后在mavsdk控制模拟器里的飞机进行控制。
目前提供了自动起飞降落的Demo,指点飞行的Demo,和航点飞行的Demo。还提供了Ubuntu的仿真开发虚拟机,方便开发者进行算法开发,可以快速入手无人机的开发工作。
提示: 初学者在不了解无人机和控制坐标系概念的情况下,不要运行其他demo。建议在了解无人机及其控制坐标系之后,运行我们提供的仿真系统,熟悉无人机的操作特性,再运行其他仿真demo。
无人机控制坐标系基本概念(简介)
无人机中NED坐标理解
机体坐标系:机体坐标系固连飞机,其原点取在多旋翼的重心位置上。x轴在多旋翼对称平面内指向机头(机头方向与多旋+字形或X字形相关)。z轴在飞机对称平面内,垂直轴向下。然后,按右手定则确定y轴 。
地球固联坐标系:通常以多旋翼起飞位置作为坐标原点 ,先让x轴在水平面内指向某一方向,z轴垂直于地面向下。然后,按右手定则确定y轴,坐标原点取地球中心。比如NED坐标系为x轴为正北方向,y轴为正东方向,z轴指向下。
飞机的欧拉角就是基于上面两个坐标系的转换。“pitch+”为抬头,“roll+”为右旋转,“yaw+”为右偏航。
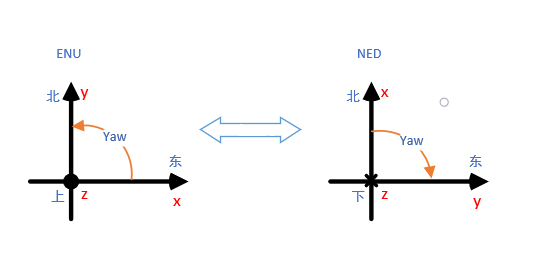
Yaw与指南针角度的关系
指南针的角度为固定不变(北朝向为0度,东朝向为90度,南朝向为180度,西朝向为270度)。
Yaw角是当前机头方向与正北方向的夹角(若地球固联坐标系为NED),当我们知道YAW角时就可以确定飞机当前的航向。比如我们的vision通过mavros给飞控的Yaw的角度是90度,而且飞机的地球固联坐标系为NED,那么我们就可以确定飞机机头当前指向为正东。即使我们没有磁力计测方向,但我们假设了一个方向,那么此时Yaw角与指南针的角度完全重合或相同。
但当Yaw角为90度,机头朝向为正北方向,那么可以确定飞机地球固联坐标系采用的是WND(W为西)。
在PX4中用到的地球固联坐标轴是NED坐标系,即x,y,z的方向固定不变(Offboard模式下除外,但是在offboard模式下,初始上电后其东北方向由Yaw角决定)。
本例程使用东北地坐标系,END,飞机上电位置为原点(坐标0.0.0)以84坐标系为基础,E为东方(Y轴),N为北方(X轴),D为高度向下(Z轴),均以正值为对应方向,负值为相反方向,例程内(Z轴)高度做了反向处理。
QGC右上角姿态球有坐标(机头朝向)与航向(度)及姿态信息。
ENU与NED区别
相关名称解释:
1. MAVLink:MAVLink是一种非常轻量级的消息传输协议, 用于地面控制终端(地面站)与无人机之间 (以及机载无人机组件之间) 进行通信。MAVLink遵循现代混合发布-订阅和点对点设计模式: 数据流作为 topics 发送/发布的, 而配置子协议 (如 路径点协议 或 参数协议)是基于重传机制的点对点模式。
2. MAVSDK:MAVSDK 是各种编程语言的库集合,用于与无人机、摄像机或地面系统等 MAVLink 系统进行交互。
3. 机体坐标系:机体坐标系与飞行器固联,坐标系符合右手法则,原点在飞行器重心处,x轴指向飞行器机头前进方向,y轴由原点指向飞行器右侧,z轴方向通过x,y由右手法则确定。机体坐标系是无人机惯性导航的基础坐标系,IMU中获得的加速度状态信息就是该坐标系下的数值。当我们获取IMU输出的x轴加速度信息时不能直接应用在NED坐标系下。 无人机中的坐标转换,即为NED坐标系(惯性系)与机体坐标系之间的转换。
4. 位置控制:位置控制同样是无人机控制系统中非常重要的控制系统。位置控制实际上就是用于控制无人机在控制飞行的位置。我们希望可以准确地控制无人机按预期的速度飞往指定的目标位置,这也是无人机全自动飞行的基础。为了确定无人机的位置,需要使用在本地坐标系下的x、y、z这3个维度的坐标。但是在控制方面上往往将x轴和y轴上的控制方法称为水平位置控制,而将z轴上的坐标控制方法称为高度控制。但是这里两个控制方法需要同时进行,最终达到对3维坐标系内无人机准确飞行控制目的。
5. 速度控制:内环PID控制器,其输入内容为速度期望减去测量速度,得到速度误差。然后通过“比例-积分-微分”控制方法对速度误差进行计算,得到其输出内容。速度控制器的输入为速度期望,而输出却是姿态角期望。
6. 姿态控制:包括俯仰角、滚转角和航向角。这3个角的期望值来源于其他模块。遥控器的控制杆量、位置控制模块的输出量、地面站系统的期望值等等。角度的期望值就是系统中希望无人机达到的某一个角度,这也就是姿态控制中的目标状态,并且我们希望无人机在这个目标状态下保持稳定。
快速使用(在windows11操作验证)
目的:快速验证无人机是否正常通讯及开发环境是否正常。
提示:
1. 建议开发者有一定基础后(例如会操控无人机,或对Ubuntu、Python有一定了解)再进行快速验证,否则请按照仿真等步骤逐步了解。
2. 请选择室外空旷地带进行测试验证,与无人机保持10米以上安全距离。
1. 预装Python3.7及以上版本、pip、QGC、mrvsdk_server、vscode、git。然后打开终端,利用pip下载mavsdk。
2. 打开终端,在git安装好后,下载demo。
3.下载电脑与飞控通信节点终端mrvsdk_server。
4. 打开MFP450基础款的QGC,将地面端网线接入电脑,电脑ip固定192.168.1.123,将自动连接QGC地面站,双击运行mrvsdk_server,即可建立demo与飞控通信节点。具体设置参考拓展帮助部分的数传设置。
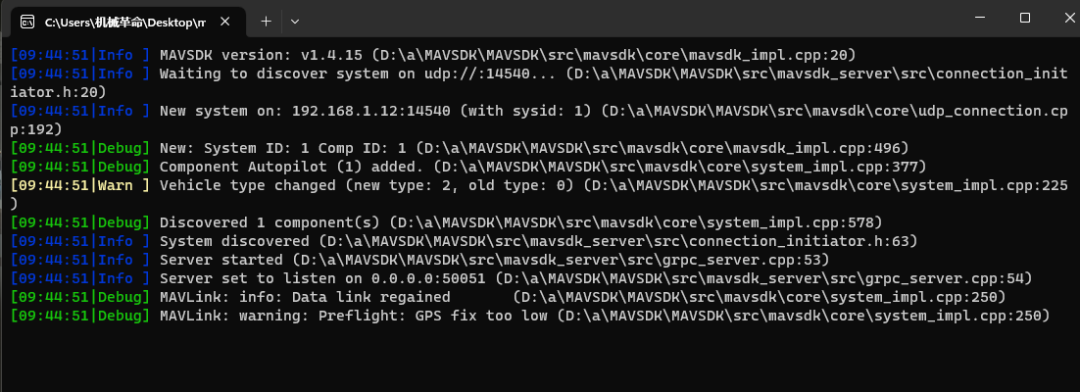
通讯成功如下图:

5. 进入vscode,打开takeoff-and-land.py文件,将注释放开(具体放开那个注释代码有介绍),在终端运行Python ./takeoff-and-land.py即可。将会执行无人机起飞与降落指令。过程中可使用遥控器进行干预。
具体操作如下视频:
MAVSDK-demo起飞降落
仿真环境安装
镜像安装和环境安装任选一种,建议镜像安装。对于无人机开发来说,我们比较建议先在仿真环境中进行测试,仿真是利用图形技术和数字模拟技术,在一个电脑的三维可视环境中,虚拟出了无人机和环境,类似一个三维游戏场景,在该场景中我们可以通过调用无人机的API控制接口,来在仿真环境中控制飞机,控制代码的实现效果和在真实物理环境中类似。提高了开发效率和减少了飞机因为代码逻辑问题带来的坠毁风险,对于新手开发者建议先在下面的仿真环境里做飞行试验,熟练之后再去真实场景做实验。
镜像安装
下载地址:https://dl.amovlab.com:30443/MFP450/pixhawk%206c/Ubuntu/
下载完毕后,可以选择虚拟机、双系统或者硬板安装。该镜像中已包含上文所述所有软件,开发者可直接运行仿真。具体安装方式可参考阿木实验室往期教程。
环境安装
1. 选择Ubuntu20.04版本系统,安装PX4-Autopilot。
2. 接着mkdir一个文件夹,在该文件夹下进行源码下载(由于在github下载很慢,所以后续到PX4-Autopilot目录下再单独下载子模块)。
git clone http://github.com/PX4/PX4-Autopilot3. 下载完成后,前往PX4-Autopilot目录检查子模块是否下载完成。
cd PX4-Autopilot/
git submodule update --init --recursive4. 可能出现执行3中命令没反应,但make的时候报错的情况,找到对应路径删掉,再执行上面那个命令。
5. 回到上一级目录,执行以下安装脚本。
cd
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh6. 运行完后按提示重新登录或者重启,然后可以update一下。
sudo apt-get update
sudo apt-get upgrade7. 进入目录编译源码进行仿真。
cd PX4-Autopilot/
make px4_sitl jmavsim8. 安装并打开QGC地面站。下载地址:https://dl.amovlab.com:30443/MFP450/pixhawk%206c/UBUNTU20.04%E5%9C%B0%E9%9D%A2%E7%AB%99/
打开终端,安装依赖,给予权限:
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libqt5gui5 -y
sudo apt install libfuse2 -y
chmod +x ./QGroundControl.AppImage
./QGroundControl.AppImage (or double click)9. 安装Python3.7以上版本后下载MAVSDK库(目前提供程序为Python版本)。
pip3 install mavsdk10. 下载VScode,前往官网或应用商店下载。
https://code.visualstudio.com/Download
11. 下载demo。
git clone https://gitee.com/amovlab1/pcsdk在VScode运行程序仿真(Python3 ./xxx.py)即可。
代码功能简介
提示:
真机与仿真操作一致,但真机需要注意遥控器各个拨杆的功能,确保处于定点模式下且有一键锁桨功能,防止意外。
以下是仿真模式使用, 请开发者务必熟悉后再上真机复现。
在VScode运行程序Python3 ./xxx.py即可 xxx.py为运行的文件名字。
demo1-起飞降落
起飞降落指令展示:运行后为飞机会起飞,悬停10秒后降落,期间会打印GPS信息,电池电量,百分比电量等,目的在于更好的展示SDK接口可用性。下图为仿真结果:

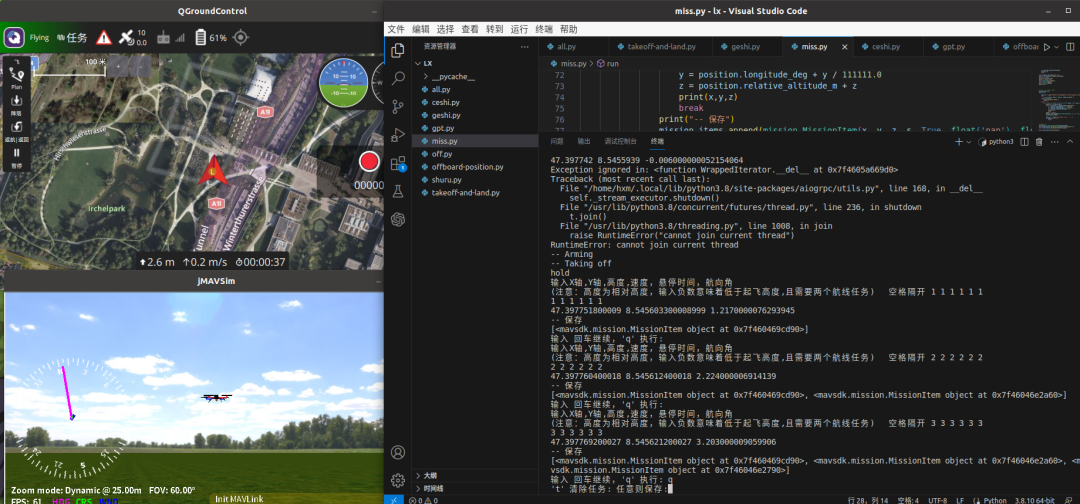
demo2-航线任务
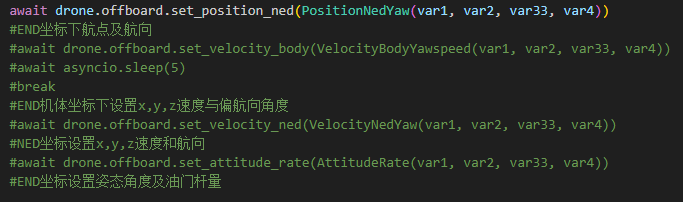
任务模式:使用地面站中的航点飞行模式,运行该例程可执行航点任务设置,主要为END坐标系下输入X轴,Y轴,高度,速度,悬停时间,航向角六类参数,回车确认保存航点后可重复输入,结束后可选择是否清除航线。下图为仿真结果(此模式遥控器可随时介入):
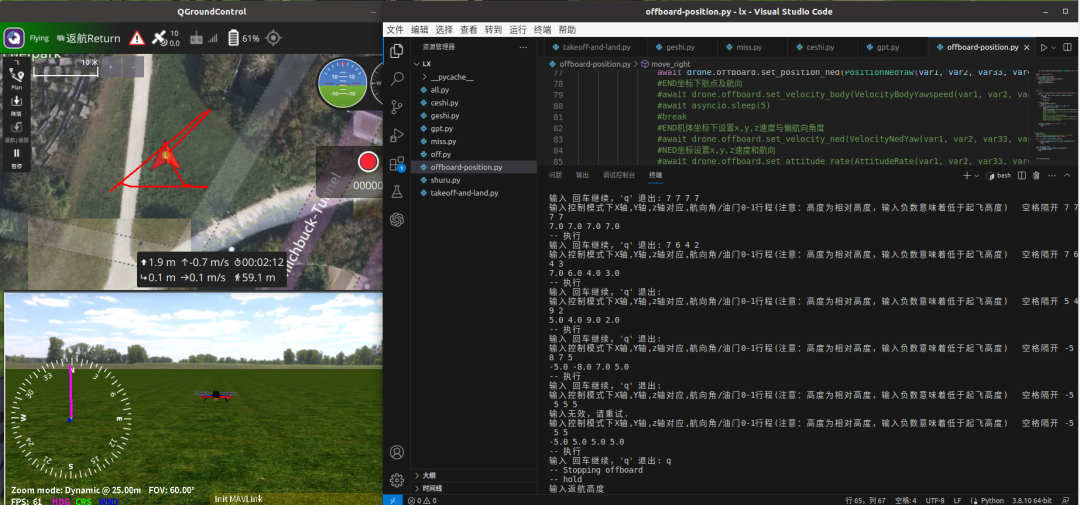
demo3-指点飞行
Offboard模式:使用机载计算机或地面计算机控制,该模式一般用于智能飞行。运行该例程可执行指点飞行,主要为END坐标下,X轴,Y轴,高度,航向。下图为仿真结果:
提示:
1. 内含END坐标下机体系速度控制,姿态控制及速度控制。这三种控制模式较为危险,因此已经注释,切换控制模式需要解开和关闭相应注释。默认只开放位置控制,除仿真外,尽量不要使用其余控制。
2. offboard模式下,遥控器不可随时介入。
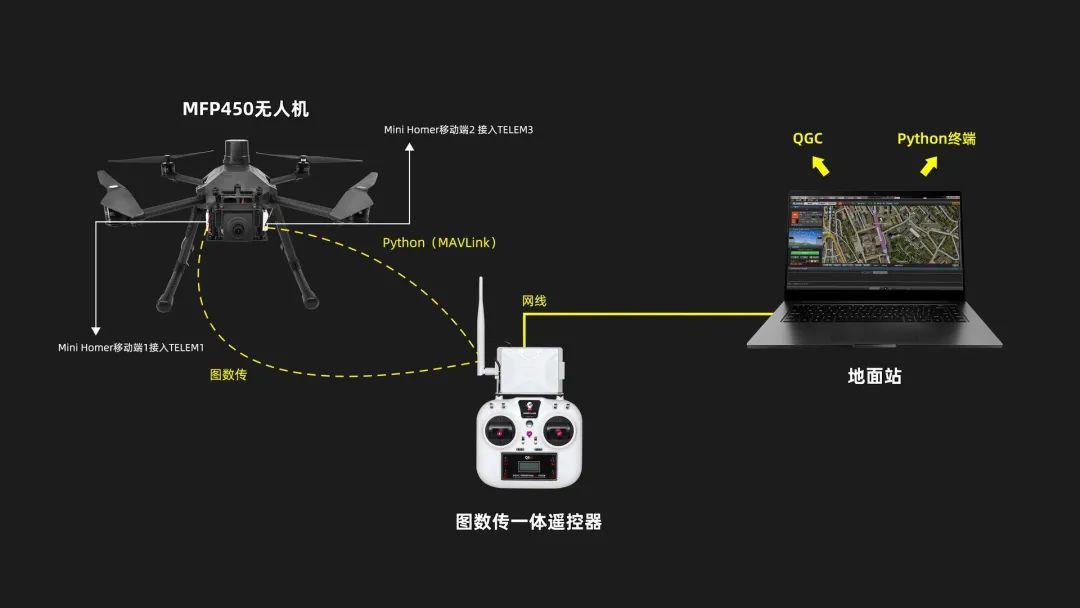
通讯连接
建议使用两路数传,QGC与MAVSDK各一路,方便更好的查看无人机状态以MFP450-V6C为例,在此基础上增加一个Mini Homer天空端,可增加MAVSDK使用时的安全性,同时也可以后续升级RTK版本硬件之一。具体方法:将新增加的Min Homer端口及目的端口设置为14540,可参考Mini Homer产品手册:https://docs.amovlab.com/minihomer-wiki/#/src/MINIHOMER/%E8%BF%9E%E6%8E%A5%E9%85%8D%E7%BD%AE%E8%AF%B4%E6%98%8E
使用数传线与飞控的TELEM3相连,(若飞控TELEM3未打开需要到参数内打开),在参数栏搜索MAV, 找到MAV_2_CONEFIG,将其修改为telem3即打开。
默认Win为例
代码解开注释(仿真与真机有注释说明) MAVSDK默认UDP:14540;QGC端口UDP:8080。
如何与飞控进行通信
1. MAVSDK(默认):mrvsdk_server是飞控和电脑通信的桥梁,将飞控和电脑进行连接,转发相应的数据信息(MAVLink协议的封装)。
提示:
如遇突发情况,请使用“ctrl+c”断开mrvsdk_server的通讯连接。
https://github.com/mavlink/mavsdk/releases
下载对应的mrvsdk_server,双击运行(或者下载其源码,自定义连接方式) 运行后终端会打印相关MAVLink信息(绿色为mavsdk信息,红色为报错)。
Mavsdk默认UDP:14540
QGC:选择连接方式--UDP--8080--确认--连接 可运行代码进行飞行测试 之所以选择两种连接方式同时获取MAVLink信息,是因为可以通过QGC更好的观察飞机的状态以做出相应的判断。
2. 自定义链接修改(不建议):下载MAVLink MAVSDK源码。
https://github.com/mavlink/MAVSDK
具体工具链路、环境等需开发者自行摸索,本文暂不提供教程。
真机运行
运行mrvsdk_server后会打印相关的MAVLink消息,结合QGC地面站确认飞机进入定点后,遥控器拨杆解锁,解锁正常,手动飞行无异常降落,然后测试一键锁桨功能正常,即可尝试mavsdk控制飞行。
安装Python3.7以上版本后下载MAVSDK库。
pip3 install mavsdk目前提供程序为Python版本。官网下载VScode,或者应用商店下载。
https://code.visualstudio.com/Download
demo下载:
https://gitee.com/amovlab1/pcsdk
具体操作如下视频:
MAVSDK
真机测试时,部分运行程序会有一次ARM指令发送,以测试指令是否正常发送,因此运行程序时注意不要对飞机进行围观和近距离接触。
提示:
真机与仿真操作一致,但真机需要注意遥控器各个拨杆的功能,需要保证处于定点模式下且有一键锁桨功能防止意外(位于左往右第二个(6通道)通道拨杆)。除offboard外,其余均可用遥控器接入操作。
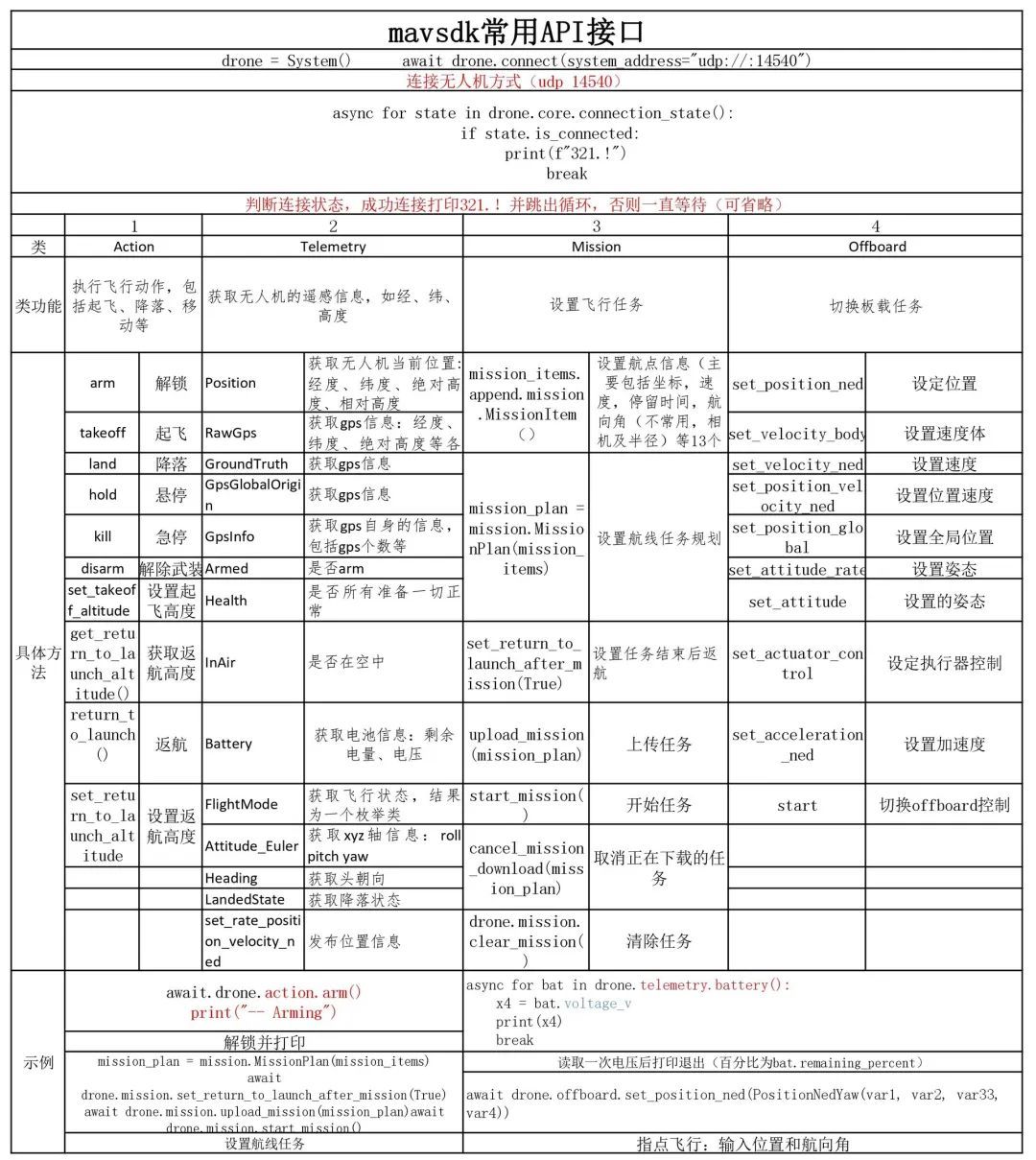
常用API接口
- End -
阿木实验室:为机器人研发提供开源软硬件工具和课程服务,让研发更高效! 技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。









![2023年中国有创呼吸机产量、需求量及行业市场规模分析[图]](https://img-blog.csdnimg.cn/img_convert/96ed74d0f2764f882efdcacf8a0b49e9.png)
![2023年中国热电厂发电装机量、热电厂发电量及市场需求分析[图]](https://img-blog.csdnimg.cn/img_convert/4f934f796f480e61848591ee361ec179.png)
![2023年中国液晶显示板产量、需求量、市场规模及价格趋势分析[图]](https://img-blog.csdnimg.cn/img_convert/2fa64e9e07355186e234baab42de42cd.png)