目录
1.python sdk使用
1.海康SDK下载
2.opencv读取sdk流
先说效果,我是用的AI推理的实时流,延迟从高达7秒降到小于1秒
如果觉得这个延迟还不能接受,下一章,给大家介绍点上不得台面的小方法
SDK(Software Development Kit)是软件开发工具包的缩写,它是一组用于开发特定软件或应用程序的工具、库和文档的集合。SDK提供了开发所需的资源和接口,帮助开发者更高效地构建应用程序。
SDK通常包含以下内容:
- 工具:SDK提供了一系列开发工具,如编译器、调试器、IDE(集成开发环境)等,用于编写、调试和测试代码。
- 库:SDK中的库是预先编译好的可重用代码模块,包含常见的功能和算法,开发者可以直接调用这些库来简化开发过程。
- 示例代码:SDK通常附带一些示例代码,展示如何使用SDK提供的功能和接口,帮助开发者快速上手并理解开发流程。
- 文档:SDK提供详细的文档,包括API参考、开发指南、示例代码解释等,帮助开发者了解SDK的功能和使用方法。
- 依赖项:SDK可能需要依赖其他软件或库,例如操作系统、第三方库等,开发者需要满足这些依赖关系才能使用SDK。
SDK的作用是简化开发过程,提供开发所需的资源和接口,节省开发者的时间和精力。通过使用SDK,开发者可以快速构建功能丰富、高效的应用程序,而无需从头开始编写所有的代码和功能。
1.python sdk使用
之前常常采用python来读取usb摄像头,因为其语言风格易读且上手快。起先,使用rtsp流来读海康的网络相机,视频画面出现延迟卡顿的现象,如果对于实时性要求较高(起码得和网页预览效果相当的帧率)的话,用rtsp流读取的方式显得不可取,本文采用在python中调用HikVision的SDK读取IP相机的方式实现,帧率的话和网络预览效果相当
1.海康SDK下载

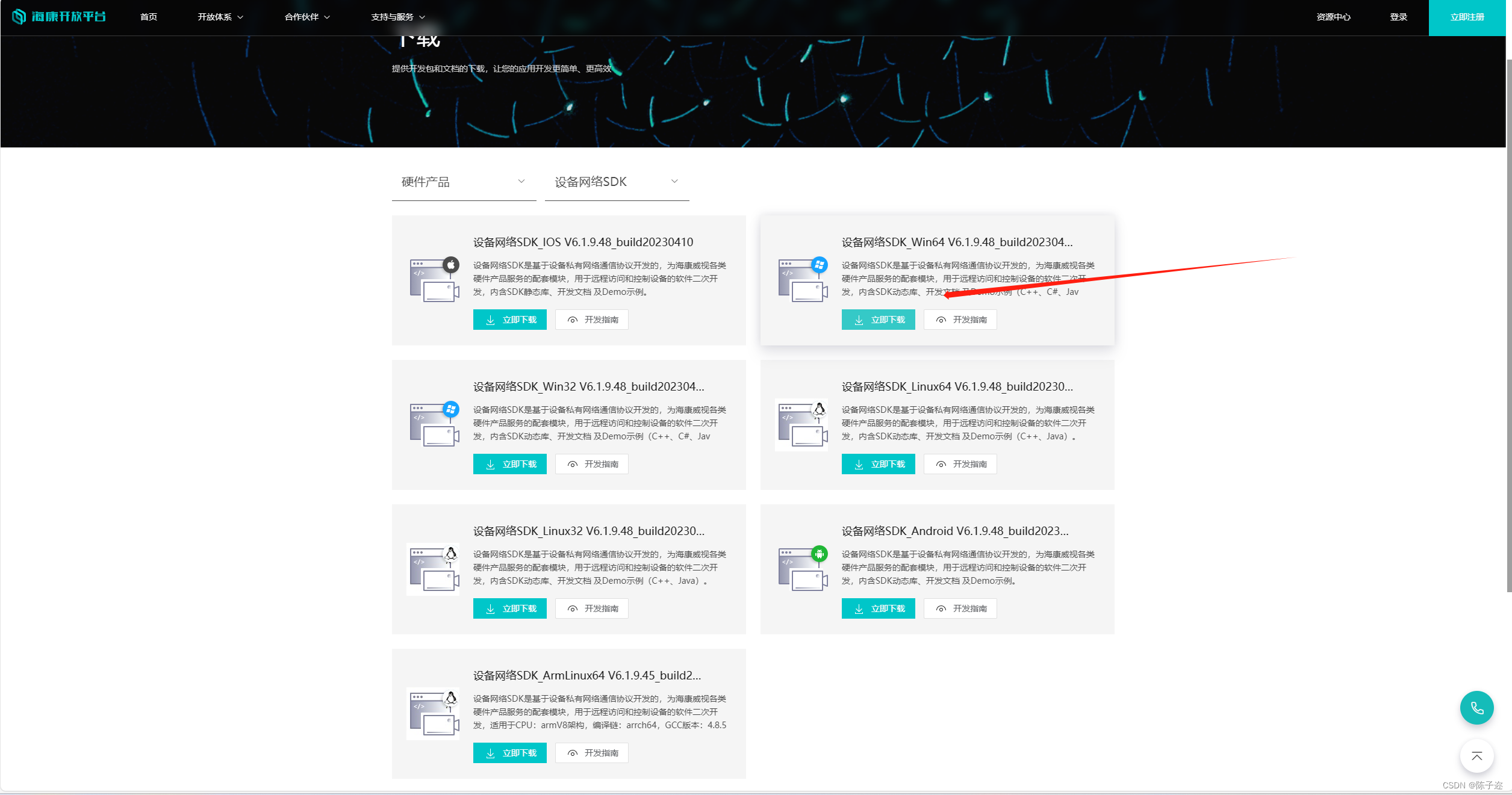
下载好解压后
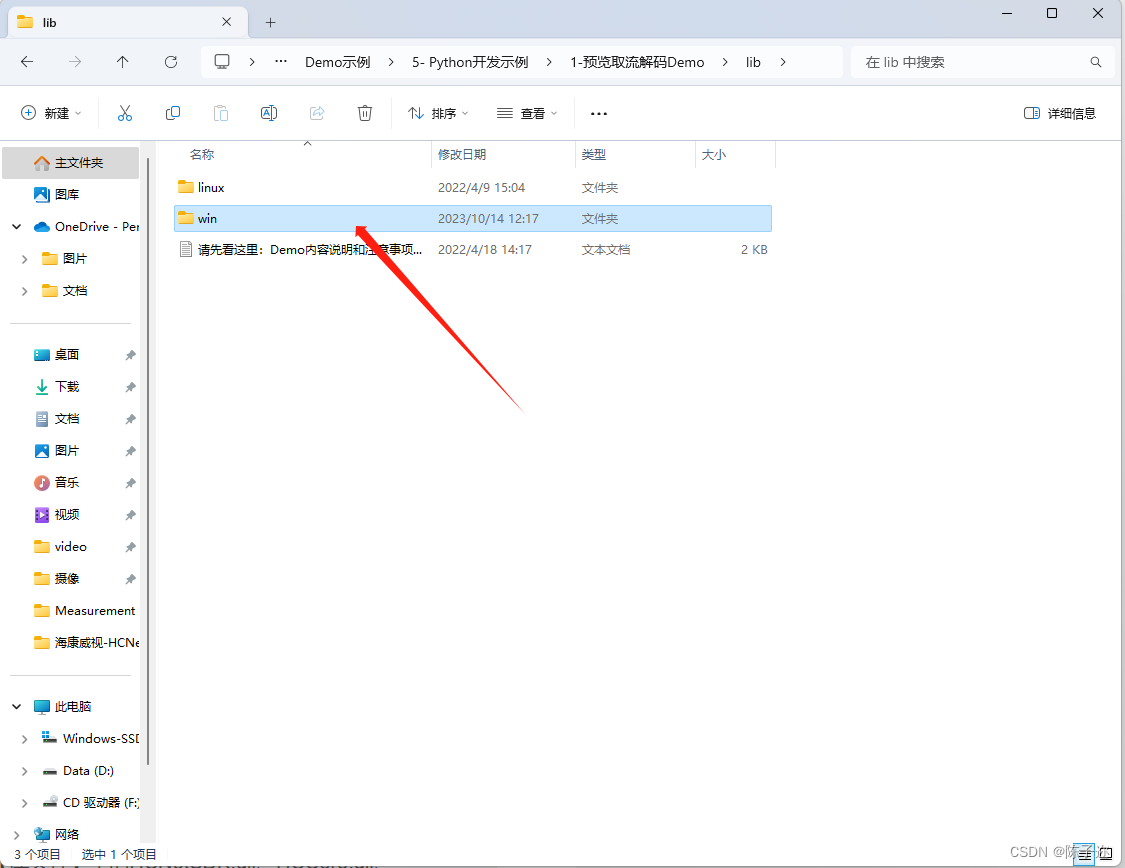
进入以下路径
海康威视-HCNetSDKV6.1.9.48_build20230410_win64---Demo示例---5- Python开发示例---1-预览取流解码Demo
1.找到这个lib路径,里面应该是空的

看需要选择win或者linux
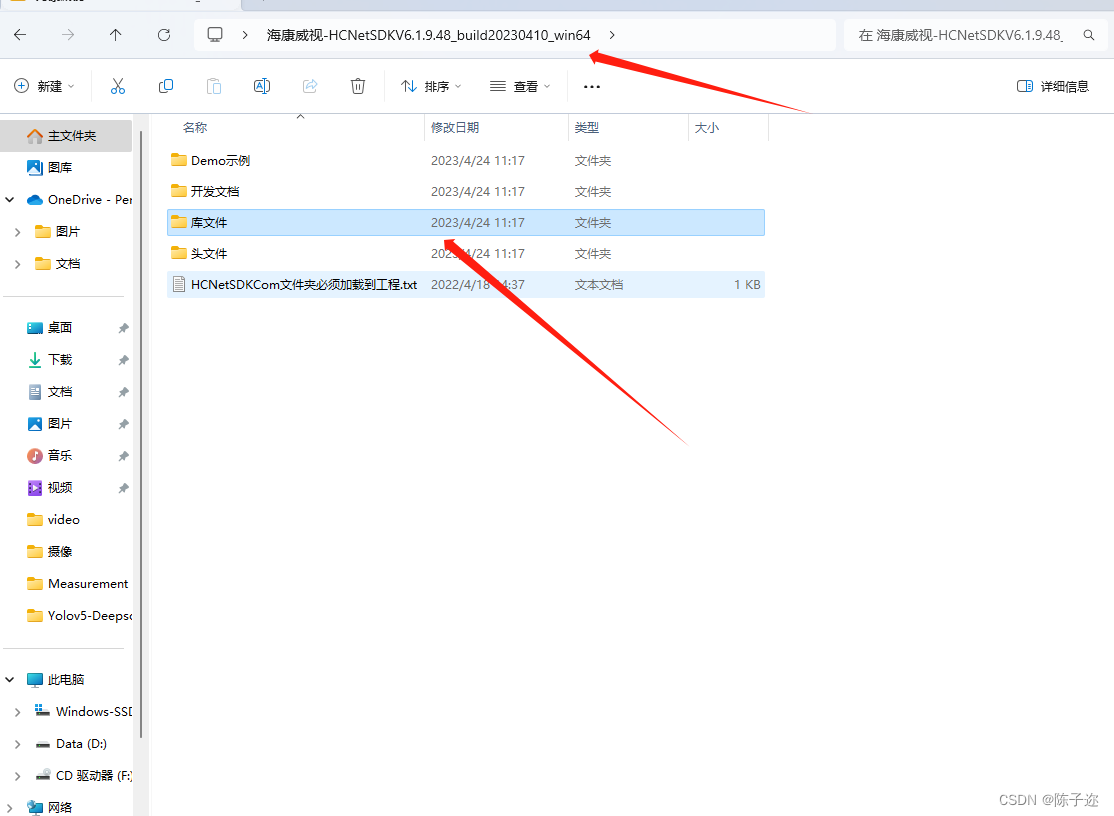
2.返回主目录,选择库文件,复制全部文件(实际按官方文档只需要部分库文件,不过可以傻瓜式全部打包),粘贴到上面的lib文件夹的win文件中
下面是官方文档的操作说明
1. 更新设备网络SDK时,SDK开发包【库文件】里的HCNetSDK.dll、HCCore.dll、HCNetSDKCom文件夹、libssl-1_1.dll、libcrypto-1_1.dll、hlog.dll、hpr.dll、zlib1.dll、PlayCtrl.dll、SuperRender.dll、AudioRender.dll等文件均要加载到程序里面,【HCNetSDKCom文件夹】(包含里面的功能组件dll库文件)需要和HCNetSDK.dll、HCCore.dll一起加载,放在同一个目录下,且HCNetSDKCom文件夹名不能修改。
2. 如果自行开发软件不能正常实现相应功能,而且程序没有指定加载的dll库路径,请在程序运行的情况下尝试删除HCNetSDK.dll。如果可以删除,说明程序可能调用到系统盘Windows->System32目录下的dll文件,建议删除或者更新该目录下的相关dll文件;如果不能删除,dll文件右键选择属性确认SDK库版本。
3. 如按上述步骤操作后还是不能实现相应功能,请根据NET_DVR_GetLastError返回的错误号判断原因。
3.运行test_main.py
获取实时画面
2.opencv读取sdk流
将下面代码贴到test_main.py的同级目录下
运行即可
有问题的朋友欢迎评论区留言
# coding=utf-8
import os
import platform
from HCNetSDK import *
from PlayCtrl import *
import numpy as np
import time
import cv2
class HKCam(object):
def __init__(self,camIP,username,password,devport=8000):
# 登录的设备信息
self.DEV_IP = create_string_buffer(camIP.encode())
self.DEV_PORT =devport
self.DEV_USER_NAME = create_string_buffer(username.encode())
self.DEV_PASSWORD = create_string_buffer(password.encode())
self.WINDOWS_FLAG = False if platform.system() != "Windows" else True
self.funcRealDataCallBack_V30 = None
self.recent_img = None #最新帧
self.n_stamp = None #帧时间戳
self.last_stamp = None #上次时间戳
# 加载库,先加载依赖库 # 1 根据操作系统,加载对应的dll文件
if self.WINDOWS_FLAG:
os.chdir(r'./lib/win')
self.Objdll = ctypes.CDLL(r'./HCNetSDK.dll') # 加载网络库
self.Playctrldll = ctypes.CDLL(r'./PlayCtrl.dll') # 加载播放库
else:
os.chdir(r'./lib/linux')
self.Objdll = cdll.LoadLibrary(r'./libhcnetsdk.so')
self.Playctrldll = cdll.LoadLibrary(r'./libPlayCtrl.so')
# 设置组件库和SSL库加载路径 # 2 设置组件库和SSL库加载路径
self.SetSDKInitCfg()
# 初始化DLL
self.Objdll.NET_DVR_Init() # 3 相机初始化
# 启用SDK写日志
self.Objdll.NET_DVR_SetLogToFile(3, bytes('./SdkLog_Python/', encoding="utf-8"), False)
os.chdir(r'../../') # 切换工作路径到../../
# 登录
(self.lUserId, self.device_info) = self.LoginDev() # 4 登录相机
self.Playctrldll.PlayM4_ResetBuffer(self.lUserId,1)#清空指定缓冲区的剩余数据。这个地方传进来的是self.lUserId,为什么呢?
print(self.lUserId)
if self.lUserId < 0:#登录失败
err = self.Objdll.NET_DVR_GetLastError()
print('Login device fail, error code is: %d' % self.Objdll.NET_DVR_GetLastError())
# 释放资源
self.Objdll.NET_DVR_Cleanup()
exit()
else:
print(f'摄像头[{camIP}]登录成功!!')
self.start_play() # 5 开始播放
time.sleep(1)
def start_play(self,):
#global funcRealDataCallBack_V30
self.PlayCtrl_Port = c_long(-1) # 播放句柄
# 获取一个播放句柄 #wuzh获取未使用的通道号
if not self.Playctrldll.PlayM4_GetPort(byref(self.PlayCtrl_Port)):
print(u'获取播放库句柄失败')
# 定义码流回调函数
self.funcRealDataCallBack_V30 = REALDATACALLBACK(self.RealDataCallBack_V30)
# 开启预览
self.preview_info = NET_DVR_PREVIEWINFO()
self.preview_info.hPlayWnd = 0
self.preview_info.lChannel = 1 # 通道号
self.preview_info.dwStreamType = 0 # 主码流
self.preview_info.dwLinkMode = 0 # TCP
self.preview_info.bBlocked = 1 # 阻塞取流
# 开始预览并且设置回调函数回调获取实时流数据
self.lRealPlayHandle = self.Objdll.NET_DVR_RealPlay_V40(self.lUserId, byref(self.preview_info), self.funcRealDataCallBack_V30, None)
if self.lRealPlayHandle < 0:
print ('Open preview fail, error code is: %d' %self. Objdll.NET_DVR_GetLastError())
# 登出设备
self.Objdll.NET_DVR_Logout(self.lUserId)
# 释放资源
self.Objdll.NET_DVR_Cleanup()
exit()
def SetSDKInitCfg(self,):
# 设置SDK初始化依赖库路径
# 设置HCNetSDKCom组件库和SSL库加载路径
# print(os.getcwd())
if self.WINDOWS_FLAG:
strPath = os.getcwd().encode('gbk')
sdk_ComPath = NET_DVR_LOCAL_SDK_PATH()
sdk_ComPath.sPath = strPath
self.Objdll.NET_DVR_SetSDKInitCfg(2, byref(sdk_ComPath))
self.Objdll.NET_DVR_SetSDKInitCfg(3, create_string_buffer(strPath + b'\libcrypto-1_1-x64.dll'))
self.Objdll.NET_DVR_SetSDKInitCfg(4, create_string_buffer(strPath + b'\libssl-1_1-x64.dll'))
else:
strPath = os.getcwd().encode('utf-8')
sdk_ComPath = NET_DVR_LOCAL_SDK_PATH()
sdk_ComPath.sPath = strPath
self.Objdll.NET_DVR_SetSDKInitCfg(2, byref(sdk_ComPath))
self.Objdll.NET_DVR_SetSDKInitCfg(3, create_string_buffer(strPath + b'/libcrypto.so.1.1'))
self.Objdll.NET_DVR_SetSDKInitCfg(4, create_string_buffer(strPath + b'/libssl.so.1.1'))
def LoginDev(self,):
# 登录注册设备
device_info = NET_DVR_DEVICEINFO_V30()
lUserId = self.Objdll.NET_DVR_Login_V30(self.DEV_IP, self.DEV_PORT, self.DEV_USER_NAME, self.DEV_PASSWORD, byref(device_info))
return (lUserId, device_info)
def read(self,):
while self.n_stamp==self.last_stamp:
continue
self.last_stamp=self.n_stamp
return self.n_stamp,self.recent_img
def DecCBFun(self,nPort, pBuf, nSize, pFrameInfo, nUser, nReserved2):
if pFrameInfo.contents.nType == 3:
t0 = time.time()
# 解码返回视频YUV数据,将YUV数据转成jpg图片保存到本地
# 如果有耗时处理,需要将解码数据拷贝到回调函数外面的其他线程里面处理,避免阻塞回调导致解码丢帧
nWidth = pFrameInfo.contents.nWidth
nHeight = pFrameInfo.contents.nHeight
#nType = pFrameInfo.contents.nType
dwFrameNum = pFrameInfo.contents.dwFrameNum
nStamp = pFrameInfo.contents.nStamp
#print(nWidth, nHeight, nType, dwFrameNum, nStamp, sFileName)
YUV = np.frombuffer(pBuf[:nSize],dtype=np.uint8)
YUV = np.reshape(YUV,[nHeight+nHeight//2,nWidth])
img_rgb = cv2.cvtColor(YUV,cv2.COLOR_YUV2BGR_YV12)
self.recent_img,self.n_stamp = img_rgb,nStamp
def RealDataCallBack_V30(self,lPlayHandle, dwDataType, pBuffer, dwBufSize, pUser):
# 码流回调函数
if dwDataType == NET_DVR_SYSHEAD:
# 设置流播放模式
self.Playctrldll.PlayM4_SetStreamOpenMode(self.PlayCtrl_Port, 0)
# 打开码流,送入40字节系统头数据
if self.Playctrldll.PlayM4_OpenStream(self.PlayCtrl_Port, pBuffer, dwBufSize, 1024*1024):
# 设置解码回调,可以返回解码后YUV视频数据
#global FuncDecCB
self.FuncDecCB = DECCBFUNWIN(self.DecCBFun)
self.Playctrldll.PlayM4_SetDecCallBackExMend(self.PlayCtrl_Port, self.FuncDecCB, None, 0, None)
# 开始解码播放
if self.Playctrldll.PlayM4_Play(self.PlayCtrl_Port, None):
print(u'播放库播放成功')
else:
print(u'播放库播放失败')
else:
print(u'播放库打开流失败')
elif dwDataType == NET_DVR_STREAMDATA:
self.Playctrldll.PlayM4_InputData(self.PlayCtrl_Port, pBuffer, dwBufSize)
else:
print (u'其他数据,长度:', dwBufSize)
def release(self):
self.Objdll.NET_DVR_StopRealPlay(self.lRealPlayHandle)
if self.PlayCtrl_Port.value > -1:
self.Playctrldll.PlayM4_Stop(self.PlayCtrl_Port)
self.Playctrldll.PlayM4_CloseStream( self.PlayCtrl_Port)
self.Playctrldll.PlayM4_FreePort( self.PlayCtrl_Port)
PlayCtrl_Port = c_long(-1)
self.Objdll.NET_DVR_Logout(self.lUserId)
self.Objdll.NET_DVR_Cleanup()
print('释放资源结束')
def __enter__(self):
return self
def __exit__(self, exc_type, exc_val, exc_tb):
self.release()
if __name__=="__main__":
camIP ='192.168.1.122'
#camIP ='192.168.3.157'
DEV_PORT = 8000
username ='admin'
password = 'admin'
HIK= HKCam(camIP,username,password)
last_stamp = 0
while True:
t0 =time.time()
n_stamp,img = HIK.read()
last_stamp=n_stamp
'''
TODO
'''
kkk = cv2.waitKey(1)
if kkk ==ord('q'):
break
HIK.release()