目录
一、前言
二、Simulink~自动控制原理
1、Simulink官方教程
2、开环系统、闭环系统
a. 开环系统
加干扰
b. 闭环系统
三、Simulink模型仿真
1、信号发生器
a. 阶跃信号发生器
b. 脉冲信号发生器
2、比较点
3、传递函数
a. 比例环节(Proportional Link)
b. 惯性环节
c. 积分环节(Integral Link)
d. 微分环节(Derivative Link)
4、示波器
四、典例
系统结构
搭建过程
实验结果
一、前言
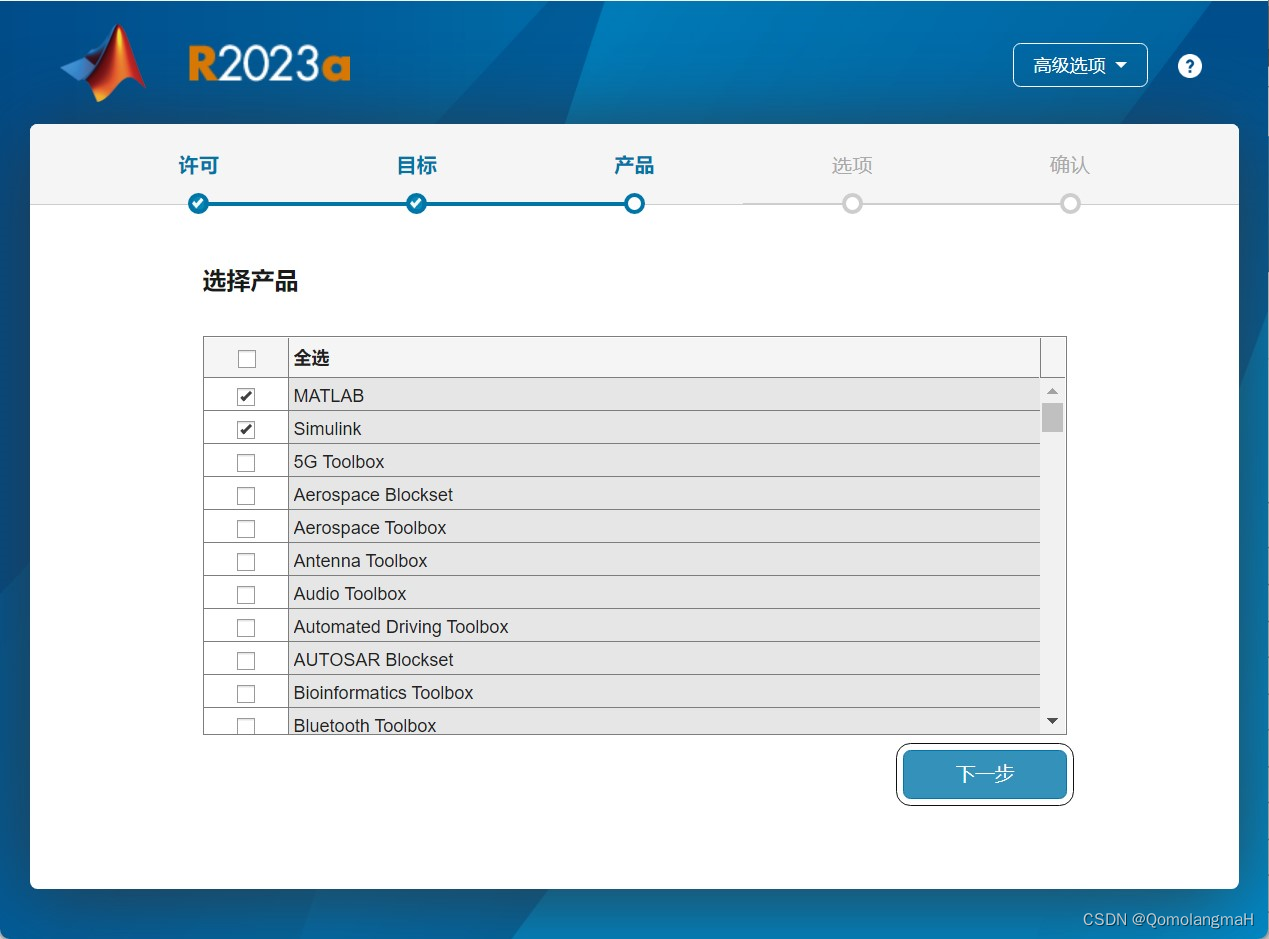
在MATLAB中,可以使用Simulink来建立自动控制原理的仿真模型。Simulink是MATLAB的一个工具箱,用于建立、仿真和分析动态系统模型。可以使用Simulink中提供的各种组件和模块来模拟开环系统和闭环系统。
本文首先介绍了自动控制原理中的开环系统与闭环系统的概念、然后介绍了Simulink中的部分简单模块(信号发生器、传递函数模块和示波器等),最后进行了具体的仿真模型搭建。
Matlab官网:
MATLAB - 技术计算语言 产品信息 (mathworks.cn)![]() https://ww2.mathworks.cn/products/matlab.html
https://ww2.mathworks.cn/products/matlab.html
二、Simulink~自动控制原理
1、Simulink官方教程

2、开环系统、闭环系统
a. 开环系统
开环系统是指没有反馈环路的系统。在开环系统中,控制器的输出直接作为输入信号发送给执行器,执行器将输出信号传递给被控对象。被控对象对输入信号进行处理,并产生相应的输出。开环系统不考虑输出与期望值之间的差异,因此无法校正或调整控制器的输出。这种系统常用于简单的控制任务或用于对系统进行初步评估。
举例:

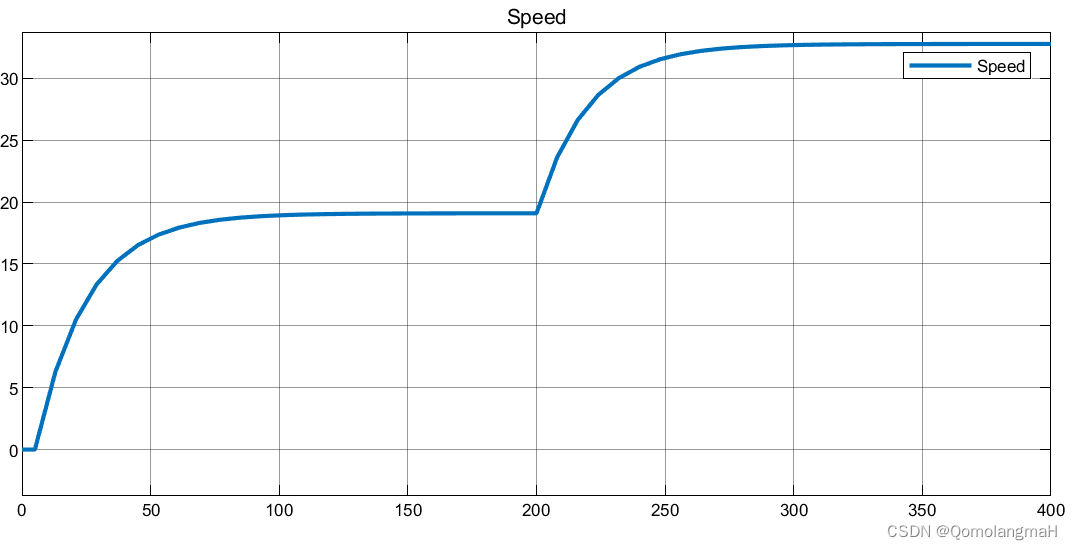
0-200s内车辆速度曲线:

加干扰
车辆在200s前以踏板开度为0.5的状态稳定行驶, 在200s时突然遇到一个下坡(斜率一定)

b. 闭环系统
闭环系统,又称为反馈控制系统,是一种具有反馈环路的系统。在闭环系统中,系统的输出被测量,并与期望输出进行比较。根据比较结果,控制器会调整其输出,以减小输出与期望值之间的差异。闭环系统通过不断监测和调整来实现对系统的控制和稳定。这种系统可以更好地应对外部干扰和参数变化,并且能够实现更精确的控制。
举例:
油门踏板受控制器(驾驶员)控制,车辆的实际车速可以由带有噪声的车速传感器测量


- 开环系统和闭环系统区别在于是否具有反馈机制。
- 开环系统没有反馈机制,输出不受调节;
- 闭环系统通过反馈机制来调节输出,以使其更接近期望值。
三、Simulink模型仿真

1、信号发生器
信号发生器是用于生成各种类型的信号的设备或模块。在自动控制原理中,信号发生器常用于提供输入信号,以模拟不同的工作条件和测试系统的响应。
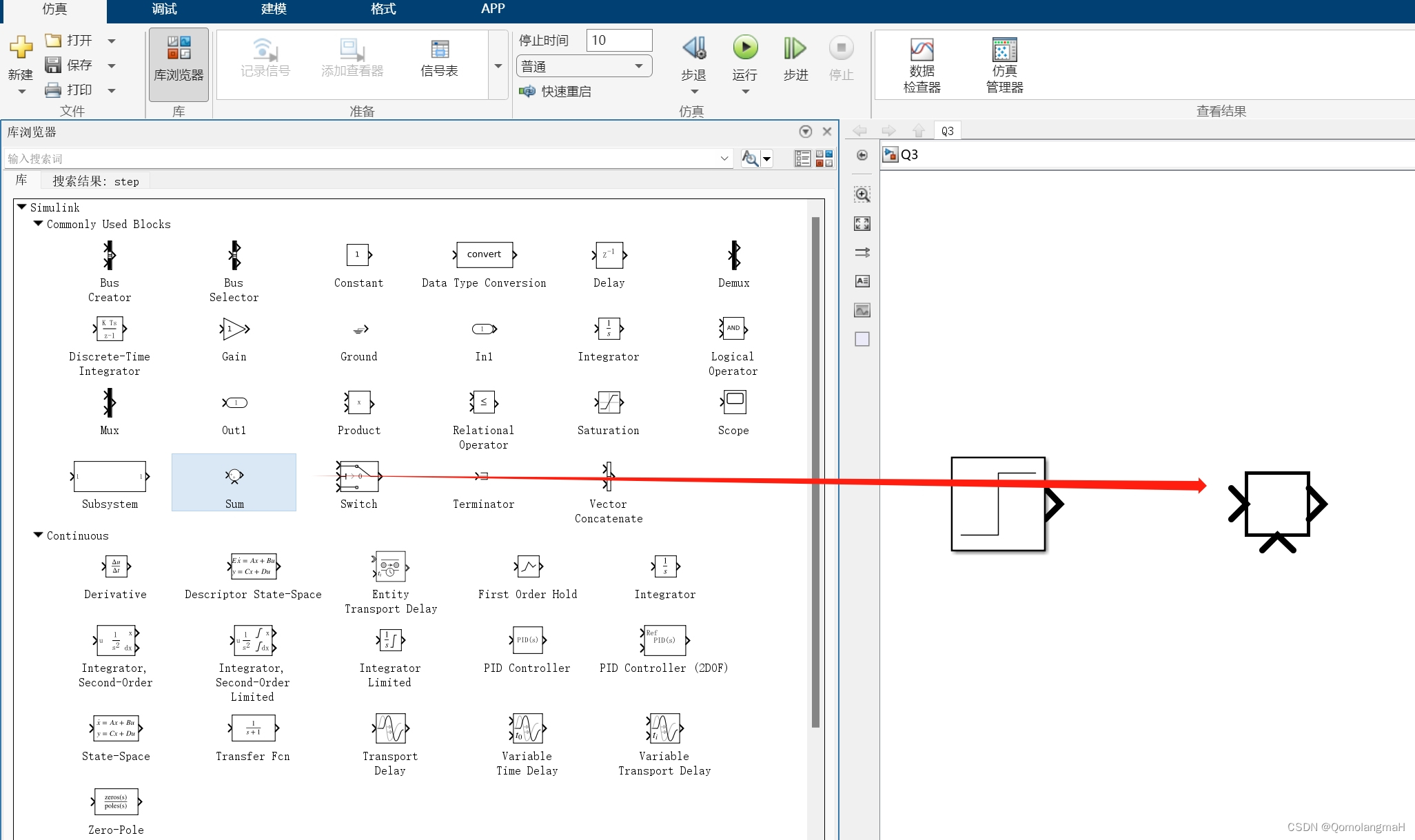
a. 阶跃信号发生器
阶跃信号发生器用于生成阶跃信号,也称为单位阶跃信号。阶跃信号是一种在某一时刻突然从一个稳定状态跃变到另一个稳定状态的信号。阶跃信号常用于测试系统的响应和稳定性。阶跃信号发生器可以设置跃变时刻和跃变幅度,以便模拟不同的工作条件。
可直接搜索:step

b. 脉冲信号发生器
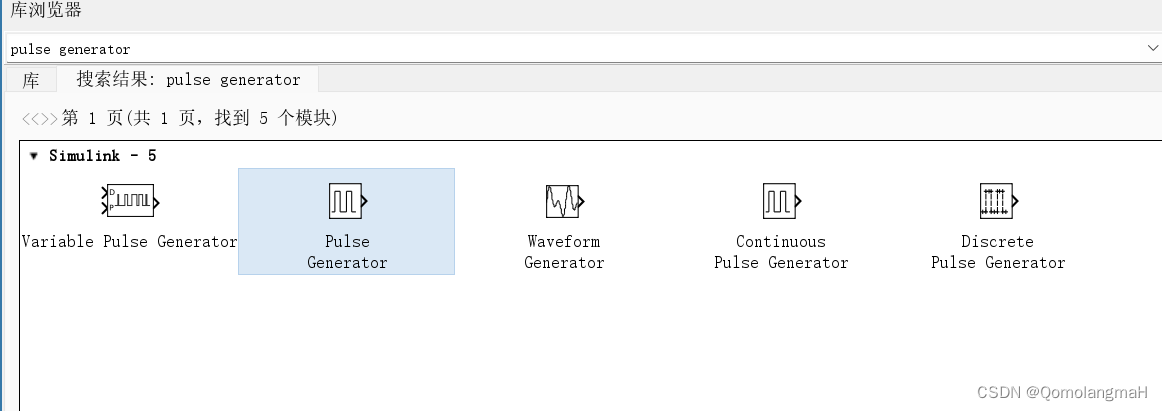
脉冲信号发生器用于生成脉冲信号,也称为矩形脉冲信号。脉冲信号是一种在一段时间内保持稳定状态,然后突然发生突变的信号。脉冲信号常用于测试系统的频率响应和传递函数。脉冲信号发生器可以设置脉冲宽度、脉冲间隔和脉冲幅度,以便模拟不同的工作条件。
可直接搜索:pulse generator
2、比较点
亦可直接搜索:sum

3、传递函数
传递函数是描述线性时不变系统输入和输出之间关系的数学函数。在自动控制中,传递函数通常用于描述系统的动态特性和频率响应。传递函数可以表示为输出与输入之间的比率,其中输入和输出均为复数函数。
a. 比例环节(Proportional Link)
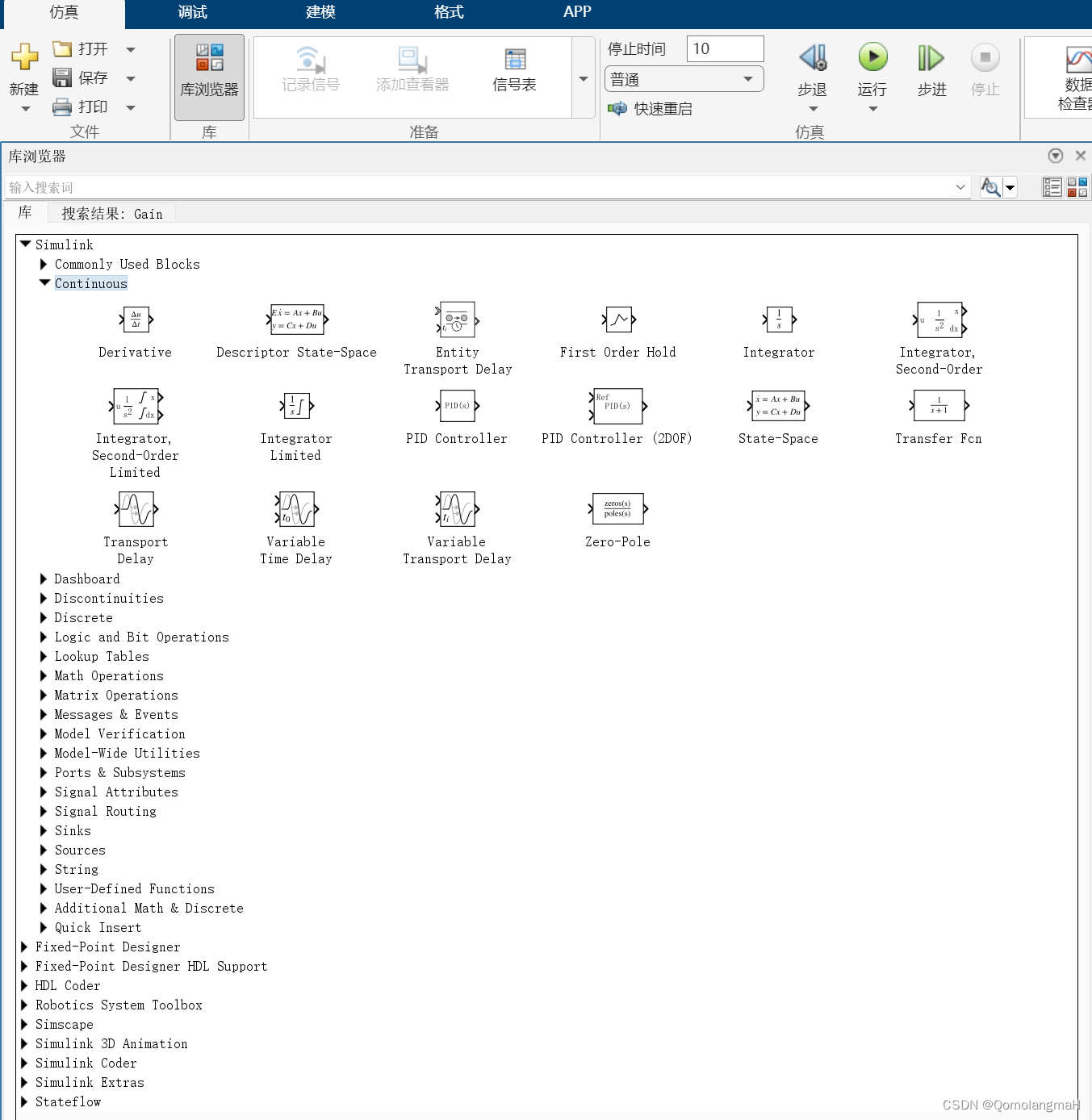
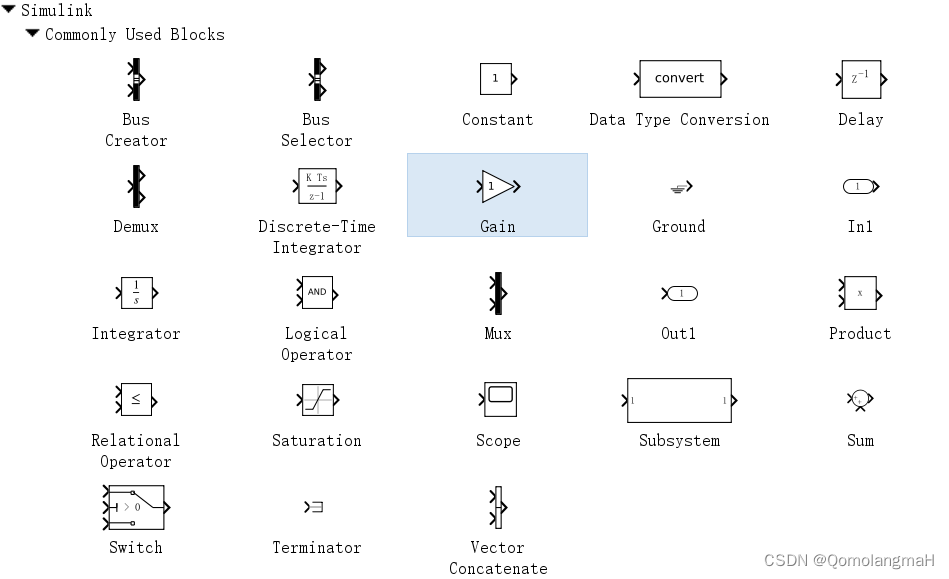
传递函数为K,可直接搜索:Gain
b. 惯性环节
传递函数为,亦可直接搜索:Transfer Fcn

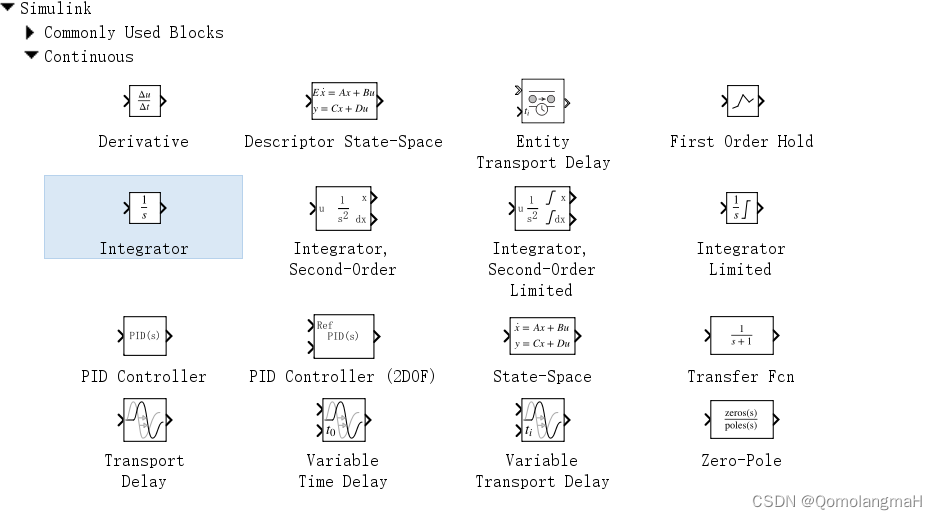
c. 积分环节(Integral Link)
传递函数为,亦可直接搜索:Integrator
d. 微分环节(Derivative Link)
传递函数为s,亦可直接搜索:Derivative
4、示波器
亦可直接搜索:scope
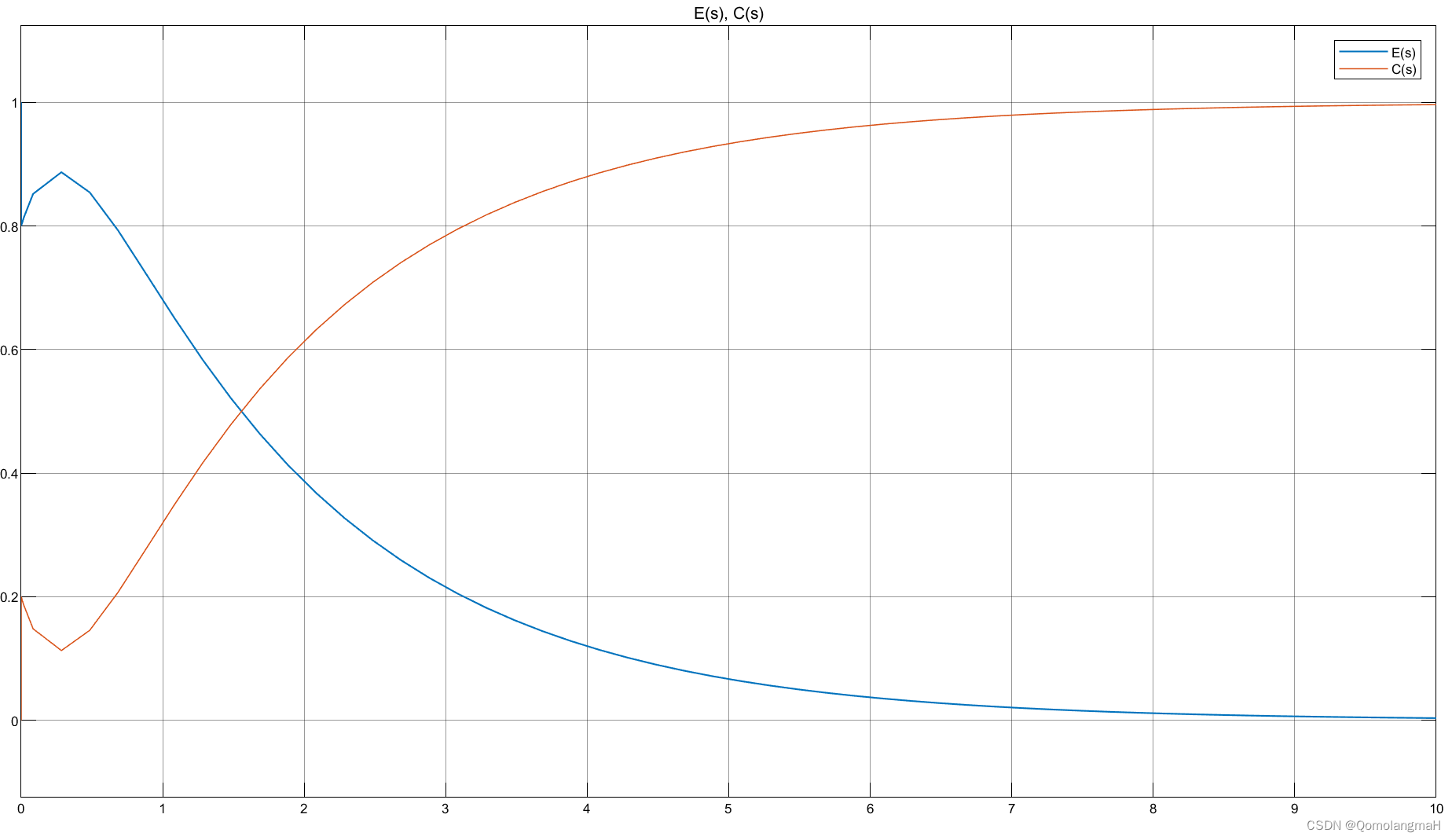
四、典例
系统结构
搭建过程
- 拖入各模块
- 连线
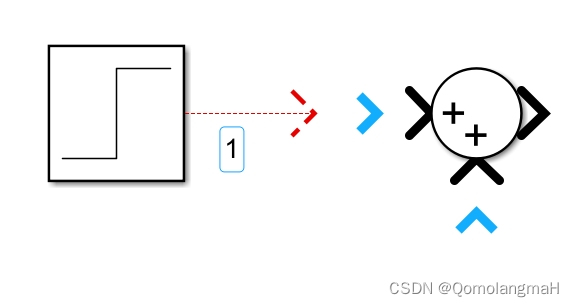

- 按照上述操作拖入并连接所有模块
- 双击修改模型参数


实验结果