上一篇笔记学习了Linux内核的顶层Makefile,现在来看Linux内核的大致启动流程,Linux内核的启
动流程要比uboot复杂的多,涉及到的内容也更多,因此本章就大致的了解一Linux内核的启动流程。
链接脚本vmlinux.lds
要分析Linux启动流程,同样需要先编译一Linux源码,因为有很多文件是需要编译才会生成的。首先分析Linux内核的链接脚本文件arch/arm/kernel/vmlinux.lds,通过链接脚本可以找到Linux内核的第一行程序是从哪里执行的。vmlinux.lds中有如下代码(有省略):
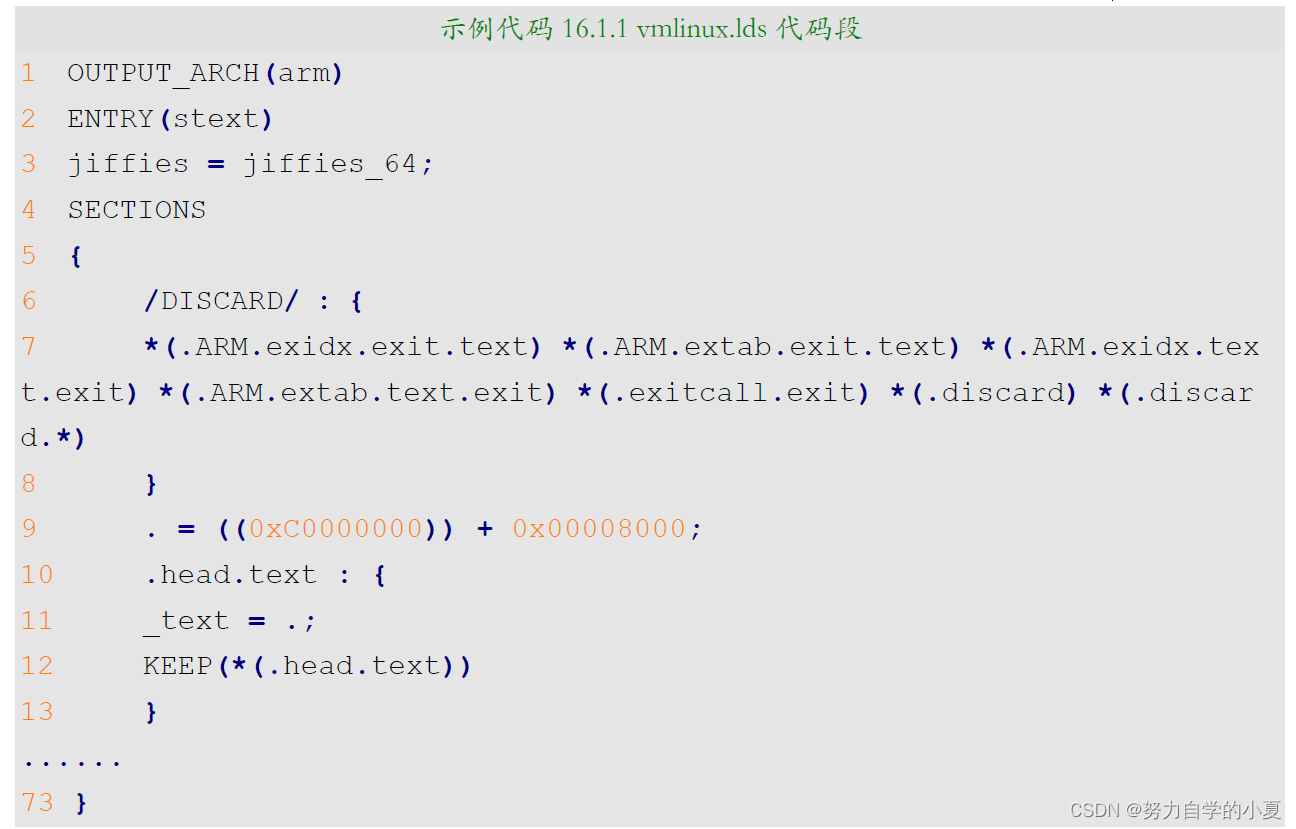
第2行的ENTRY指明了Linux内核入口,入口为stext,stext定义在文件arch/arm/kernel/head.S中,因此要分析Linux内核的启动流程,就得先从文件arch/arm/kernel/head.S的stext处开始分析。
Linux内核启动流程分析
Linux内核入口stext
stext是Linux内核的入口地址,在文件arch/arm/kernel/head.S中有如下所示提示内容:
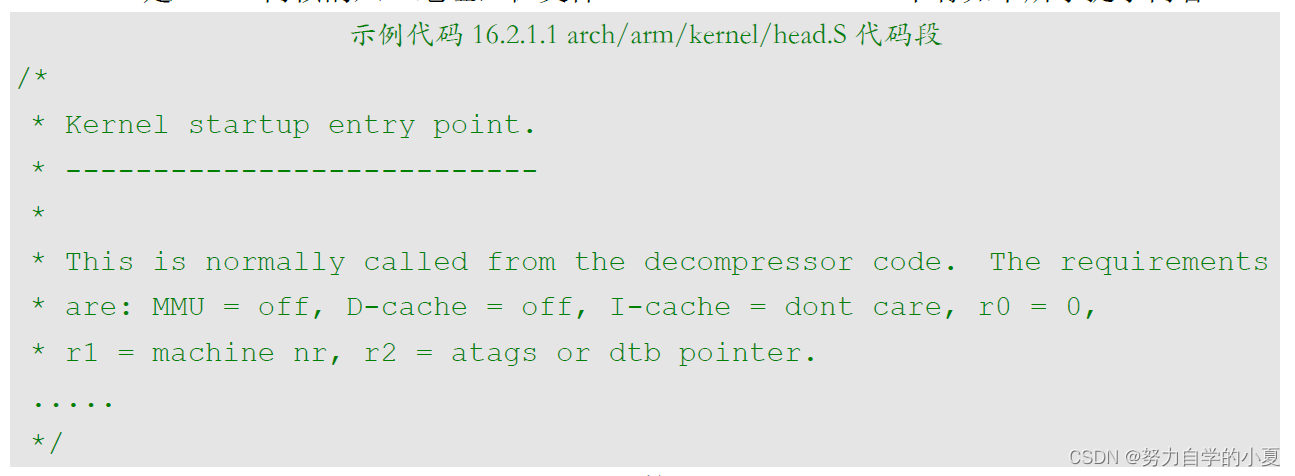
根据示例代码16.2.1.1中的注释,Linux内核启动之前要求如下:
- 关闭MMU
- 关闭D-cache
- I-Cache无所谓
- r0=0
- r1=machine nr(也就是机器ID)
- r2=atags或设备树(dtb)首地址
Linux内核的入口点stext其实相当于内核的入口函数,stext函数内容如下:
示例代码16.2.1.2 arch/arm/kernel/head.S 代码段
77 ENTRY(stext)
......
88 @ ensure svc mode and all interrupts masked
89 safe_svcmode_maskall r9
90
91 mrc p15, 0, r9, c0, c0 @ get processor id
92 bl __lookup_processor_type @ r5=procinfo r9=cpuid
93 movs r10, r5 @ invalid processor (r5=0)?
94 THUMB( it eq ) @ force fixup-able long branch encoding
95 beq __error_p @ yes, error 'p'
......
105 #ifndef CONFIG_XIP_KERNEL
......
110 #else
111 ldr r8, =PLAT_PHYS_OFFSET @ always constant in this case
112 #endif
113
114 /*
115 * r1 = machine no, r2 = atags or dtb,
116 * r8 = phys_offset, r9 = cpuid, r10 = procinfo
117 */
118 bl __vet_atags
......
125 bl __create_page_tables
......
146 ldr r13, =__mmap_switched @ address to jump to after
147 @ mmu has been enabled
148 badr lr, 1f @ return (PIC) address
149 #ifdef CONFIG_ARM_LPAE
150 mov r5, #0 @ high TTBR0
151 mov r8, r4, lsr #12 @ TTBR1 is swapper_pg_dir pfn
152 #else
153 mov r8, r4 @ set TTBR1 to swapper_pg_dir
154 #endif
155 ldr r12, [r10, #PROCINFO_INITFUNC]
156 add r12, r12, r10
157 ret r12
158 1: b __enable_mmu
159 ENDPROC(stext)
第89行,调用函数safe_svcmode_maskall确保CPU处于SVC模式,并且关闭了所有的中断safe_svcmode_maskall定义在文件
arch/arm/include/asm/assembler.h中。
第91行,读处理器ID,ID值保存在r9寄存器中。
第92行,调用函数__lookup_processor_type检查当前系统是否支持此CPU,如果支持的就获取procinfo信息。procinfo是proc_info_list类型的结构体,proc_info_list在文件arch/arm/include/asm/procinfo.h中的定义如下:
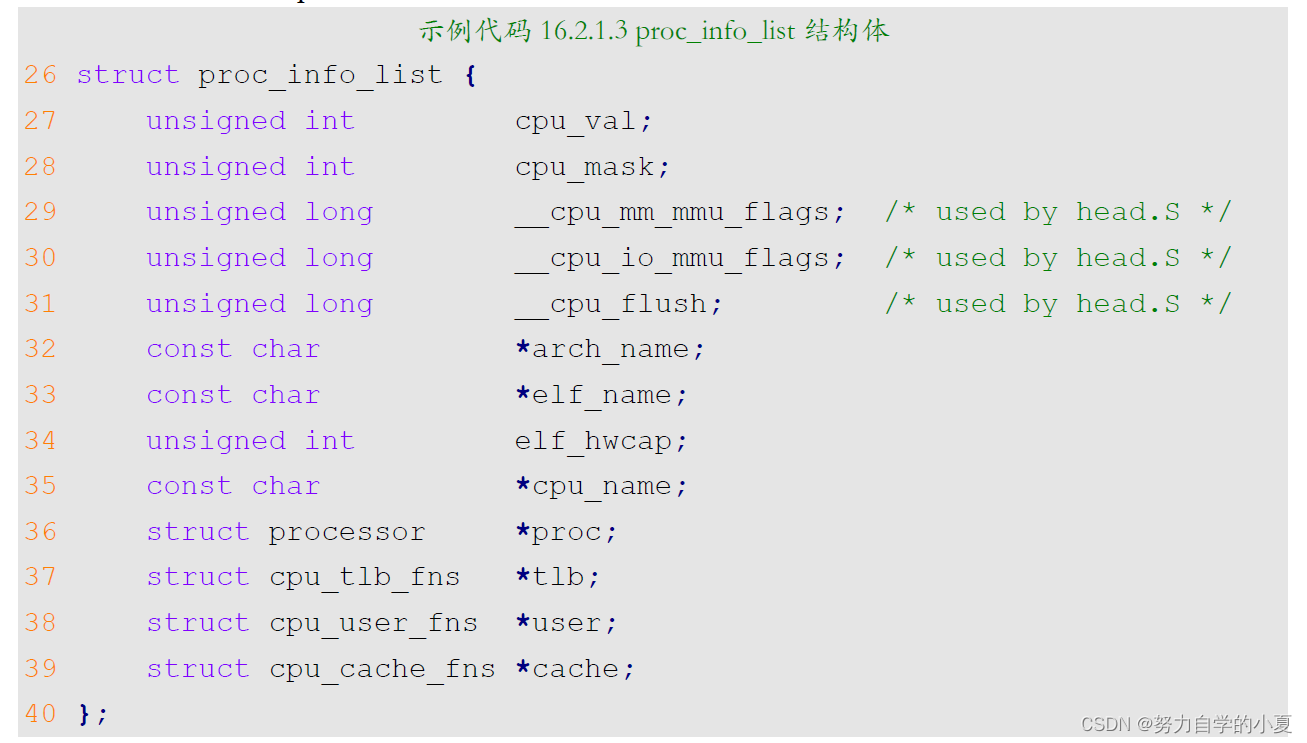
Linux内核将每种处理器都抽象为一个proc_info_list结构体,每种处理器都对应一个procinfo。因此可以通过处理器ID来找到对应的procinfo结构,__lookup_processor_type函数找
到对应处理器的procinfo以后会将其保存到r5寄存器中。
继续回到示例代码16.2.1.2中,第118行,调用函数__vet_atags验证atags或设备树(dtb)的合法性。函数__vet_atags定义在文件arch/arm/kernel/head-common.S中。
第120行,STM32MP157是双核A7处理器,支持MP,因此定了宏CONFIG_SMP_ON_UP,所以此处__fixup_smp函数会执行,处理多核。
第125行,调用函数__create_page_tables创建页表。
第146行,将函数__mmap_switched的地址保存到r13寄存器中。__mmap_switched定义在文件arch/arm/kernel/head-common.S,__mmap_switched最终会调用start_kernel函数。
第158行,调用__enable_mmu函数使能MMU,__enable_mmu定义在文件arch/arm/kernel/head.S中。__enable_mmu最终会通过调用__turn_mmu_on来打开MMU,__turn_mmu_on最后会执行r13里面保存的__mmap_switched函数。
__mmap_switched函数
__mmap_switched函数定义在文件arch/arm/kernel/head-common.S中,函数代码如下:
示例代码16.2.2.1 head-common.S 代码段
77 __mmap_switched:
78
79 mov r7, r1
80 mov r8, r2
81 mov r10, r0
82
83 adr r4, __mmap_switched_data
84 mov fp, #0
85
86 #if defined(CONFIG_XIP_DEFLATED_DATA)
87 ARM( ldr sp, [r4], #4 )
88 THUMB( ldr sp, [r4] )
89 THUMB( add r4, #4 )
90 bl __inflate_kernel_data @ decompress .data to RAM
91 teq r0, #0
92 bne __error
93 #elif defined(CONFIG_XIP_KERNEL)
94 ARM( ldmia r4!, {r0, r1, r2, sp} )
95 THUMB( ldmia r4!, {r0, r1, r2, r3} )
96 THUMB( mov sp, r3 )
97 sub r2, r2, r1
98 bl memcpy @ copy .data to RAM
99 #endif
100
101 ARM( ldmia r4!, {r0, r1, sp} )
102 THUMB( ldmia r4!, {r0, r1, r3} )
103 THUMB( mov sp, r3 )
104 sub r2, r1, r0
105 mov r1, #0
106 bl memset @ clear .bss
107
108 ldmia r4, {r0, r1, r2, r3}
109 str r9, [r0] @ Save processor ID
110 str r7, [r1] @ Save machine type
111 str r8, [r2] @ Save atags pointer
112 cmp r3, #0
113 strne r10, [r3] @ Save control register values
114 mov lr, #0
115 b start_kernel
116 ENDPROC(__mmap_switched)
第115行最终调用start_kernel来启动Linux内核,start_kernel函数定义在文件init/main.c中。
start_kernel函数
start_kernel通过调用众多的子函数来完成Linux启动之前的一些初始化工作,由于start_kernel函数里面调用的子函数太多,而这些子函数又很复杂,因此简单来看一下一些重要的子函数。精简并添加注释后的start_kernel函数内容如下:
示例代码16.2.3.1 start_kernel函数
asmlinkage __visible void __init start_kernel(void)
{
char *command_line;
char *after_dashes;
set_task_stack_end_magic(&init_task);/* 设置任务栈结束魔术数,用于栈溢出检测 */
smp_setup_processor_id(); /* 跟SMP有关(多核处理器),设置处理器ID。
* 有很多资料说ARM架构下此函数为空函数,那是因
* 为他们用的老版本Linux,而那时候ARM还没有多
* 核处理器。 */
debug_objects_early_init(); /* 做一些和debug有关的初始化 */
cgroup_init_early(); /* cgroup初始化,cgroup用于控制Linux系统资源*/
local_irq_disable(); /* 关闭当前CPU中断 */
early_boot_irqs_disabled = true;
/*
* 中断关闭期间做一些重要的操作,然后打开中断
*/
boot_cpu_init(); /* 跟CPU有关的初始化 */
page_address_init(); /* 页地址相关的初始化 */
pr_notice("%s", linux_banner);/* 打印Linux版本号、编译时间等信息 */
setup_arch(&command_line); /* 架构相关的初始化,此函数会解析传递进来的
* ATAGS或者设备树(DTB)文件。会根据设备树里面
* 的model和compatible这两个属性值来查找
* Linux是否支持这个单板。此函数也会获取设备树
* 中chosen节点下的bootargs属性值来得到命令
* 行参数,也就是uboot中的bootargs环境变量的
* 值,获取到的命令行参数会保存到 *command_line中。
*/
mm_init_cpumask(&init_mm); /* 看名字,应该是和内存有关的初始化 */
setup_command_line(command_line); /* 好像是存储命令行参数 */
setup_nr_cpu_ids(); /* 如果只是SMP(多核CPU)的话,此函数用于获取
* CPU核心数量,CPU数量保存在变量
* nr_cpu_ids中。
*/
setup_per_cpu_areas(); /* 在SMP系统中有用,设置每个CPU的per-cpu数据 */
boot_cpu_state_init();
smp_prepare_boot_cpu();
build_all_zonelists(NULL, NULL); /* 建立系统内存页区(zone)链表 */
page_alloc_init(); /* 处理用于热插拔CPU的页 */
/* 打印命令行信息 */
pr_notice("Kernel command line: %s\n", boot_command_line);
parse_early_param(); /* 解析命令行中的console参数 */
after_dashes = parse_args("Booting kernel",
static_command_line,
__start___param, __stop___param - __start___param,
-1, -1, &unknown_bootoption);
if (!IS_ERR_OR_NULL(after_dashes))
parse_args("Setting init args", after_dashes, NULL, 0, -1, -1,
set_init_arg);
jump_label_init();
setup_log_buf(0); /* 设置log使用的缓冲区*/
pidhash_init(); /* 构建PID哈希表,Linux中每个进程都有一个ID,
* 这个ID叫做PID。通过构建哈希表可以快速搜索进程 * 信息结构体。
*/
vfs_caches_init_early(); /* 预先初始化vfs(虚拟文件系统)的目录项和索引
节点缓存*/
sort_main_extable(); /* 定义内核异常列表 */
trap_init(); /* 完成对系统保留中断向量的初始化 */
mm_init(); /* 内存管理初始化 */
sched_init(); /* 初始化调度器,主要是初始化一些结构体 */
preempt_disable(); /* 关闭优先级抢占 */
if (WARN(!irqs_disabled(),/* 检查中断是否关闭,如果没有的话就关闭中断 */
"Interrupts were enabled *very* early, fixing it\n"))
local_irq_disable();
radix_tree_init();
workqueue_init_early(); /*允许及早创建工作队列和工作项排队/取消。工作项的
* 执行取决于kthread,并在workqueue_init()之后
开始。*/
rcu_init(); /* 初始化RCU,RCU全称为Read Copy Update(读-拷贝修改) */
trace_init(); /* 跟踪调试相关初始化 */
context_tracking_init();
radix_tree_init(); /* 基数树相关数据结构初始化 */
early_irq_init(); /* 初始中断相关初始化,主要是注册irq_desc结构体变
* 量,因为Linux内核使用irq_desc来描述一个中断。
*/
init_IRQ(); /* 中断初始化 */
tick_init(); /* tick初始化 */
rcu_init_nohz();
init_timers(); /* 初始化定时器 */
hrtimers_init(); /* 初始化高精度定时器 */
softirq_init(); /* 软中断初始化 */
timekeeping_init();
time_init(); /* 初始化系统时间 */
sched_clock_postinit();
printk_safe_init();
perf_event_init();
profile_init();
call_function_init();
WARN(!irqs_disabled(), "Interrupts were enabled early\n");
early_boot_irqs_disabled = false;
local_irq_enable(); /* 使能中断 */
kmem_cache_init_late(); /* slab初始化,slab是Linux内存分配器 */
console_init(); /* 初始化控制台,之前printk打印的信息都存放
* 缓冲区中,并没有打印出来。只有调用此函数
* 初始化控制台以后才能在控制台上打印信息。
*/
if (panic_later)
panic("Too many boot %s vars at `%s'", panic_later,
panic_param);
lockdep_info();/* 如果定义了宏CONFIG_LOCKDEP,那么此函数打印一些信息。*/
locking_selftest(); /* 锁自测 */
......
page_ext_init();
kmemleak_init(); /* kmemleak初始化,kmemleak用于检查内存泄漏 */
debug_objects_mem_init();
setup_per_cpu_pageset();
numa_policy_init();
if (late_time_init)
late_time_init();
calibrate_delay(); /* 测定BogoMIPS值,可以通过BogoMIPS来判断CPU的性能
* BogoMIPS设置越大,说明CPU性能越好。
*/
pidmap_init(); /* PID位图初始化 */
anon_vma_init(); /* 生成anon_vma slab缓存 */
acpi_early_init();
......
thread_stack_cache_init();
cred_init(); /* 为对象的每个用于赋予资格(凭证) */
fork_init(); /* 初始化一些结构体以使用fork函数 */
proc_caches_init(); /* 给各种资源管理结构分配缓存 */
buffer_init(); /* 初始化缓冲缓存 */
key_init(); /* 初始化密钥 */
security_init(); /* 安全相关初始化 */
dbg_late_init();
vfs_caches_init(totalram_pages); /* 为VFS创建缓存 */
signals_init(); /* 初始化信号 */
proc_root_init(); /* 注册并挂载proc文件系统 */
nsfs_init();
cpuset_init(); /* 初始化cpuset,cpuset是将CPU和内存资源以逻辑性
* 和层次性集成的一种机制,是cgroup使用的子系统之一
*/
cgroup_init(); /* 初始化cgroup */
taskstats_init_early(); /* 进程状态初始化 */
delayacct_init();
check_bugs(); /* 检查写缓冲一致性 */
acpi_subsystem_init();
sfi_init_late();
if (efi_enabled(EFI_RUNTIME_SERVICES)) {
efi_free_boot_services();
}
rest_init(); /* rest_init函数 */
}
start_kernel里面调用了大量的函数,每一个函数都是一个庞大的知识点,如果想要学习Linux内核,那么这些函数就需要去详细的研究。正点原子的嵌入式linux开发指南注重于嵌入式Linux入门,因此不会去讲太多关于Linux内核的知识。start_kernel函数最后调用了rest_init,接下来简单看一下rest_init函数。
rest_init函数
rest_init函数定义在文件init/main.c中,函数内容如下:
示例代码16.2.4.1 rest_init函数
406 noinline void __ref rest_init(void)
407 {
408 struct task_struct *tsk;
409 int pid;
410
411 rcu_scheduler_starting();
412 /*
413 * We need to spawn init first so that it obtains pid 1, however
414 * the init task will end up wanting to create kthreads, which,
415 * if we schedule it before we create kthreadd, will OOPS.
416 */
417 pid = kernel_thread(kernel_init, NULL, CLONE_FS);
418 /*
419 * Pin init on the boot CPU. Task migration is not properly
420 * working until sched_init_smp() has been run. It will set the
421 * allowed CPUs for init to the non isolated CPUs.
422 */
423 rcu_read_lock();
424 tsk = find_task_by_pid_ns(pid, &init_pid_ns);
425 set_cpus_allowed_ptr(tsk, cpumask_of(smp_processor_id()));
426 rcu_read_unlock();
427
428 numa_default_policy();
429 pid = kernel_thread(kthreadd, NULL, CLONE_FS | CLONE_FILES);
430 rcu_read_lock();
431 kthreadd_task = find_task_by_pid_ns(pid, &init_pid_ns);
432 rcu_read_unlock();
433
434 /*
435 * Enable might_sleep() and smp_processor_id() checks.
436 * They cannot be enabled earlier because with CONFIG_PREEMPTION=y
437 * kernel_thread() would trigger might_sleep() splats. With
438 * CONFIG_PREEMPT_VOLUNTARY=y the init task might have scheduled
439 * already, but it's stuck on the kthreadd_done completion.
440 */
441 system_state = SYSTEM_SCHEDULING;
442
443 complete(&kthreadd_done);
444
445 /*
446 * The boot idle thread must execute schedule()
447 * at least once to get things moving:
448 */
449 schedule_preempt_disabled();
450 /* Call into cpu_idle with preempt disabled */
451 cpu_startup_entry(CPUHP_ONLINE);
452 }
第411行,调用函数rcu_scheduler_starting,启动 RCU锁调度器。
第417行,调用函数kernel_thread创建kernel_init进程,也就是大名鼎鼎的init内核进程。init进程的 PID为1。init进程一开始是内核进程(也就是运行在内核态),后面init进程会在根文件系统中查找名为“init”这个程序,这个“init”程序处于用户态,通过运行这个“init”程序,init进程就会实现从内核态到用户态的转变。
第429行,调用函数kernel_thread创建kthreadd内核进程,此内核进程的PID为2。kthreadd进程负责所有内核进程的调度和管理。
第451行,最后调用函数cpu_startup_entry来进入idle进程,cpu_startup_entry会调用cpu_idle_loop,cpu_idle_loop是个while循环,也就是idle进程代码。idle进程的PID为0,idle进程叫做空闲进程,如果学过FreeRTOS或者UCOS的话应该听说过空闲任务。idle空闲进程就和空闲任务一样,当CPU没有事情做的时候就在idle空闲进程里面,反正就是给CPU找点事做。当其他进程要工作的时候就会抢占idle进程,从而夺取CPU使用权。其实可以看到idle进程并没有使用kernel_thread或者fork函数来创建,因为它是有主进程演变而来的。
在Linux终端中输入“ps -A”就可以打印出当前系统中的所有进程,其中就能看init进程和kthreadd进程,如下图所示:
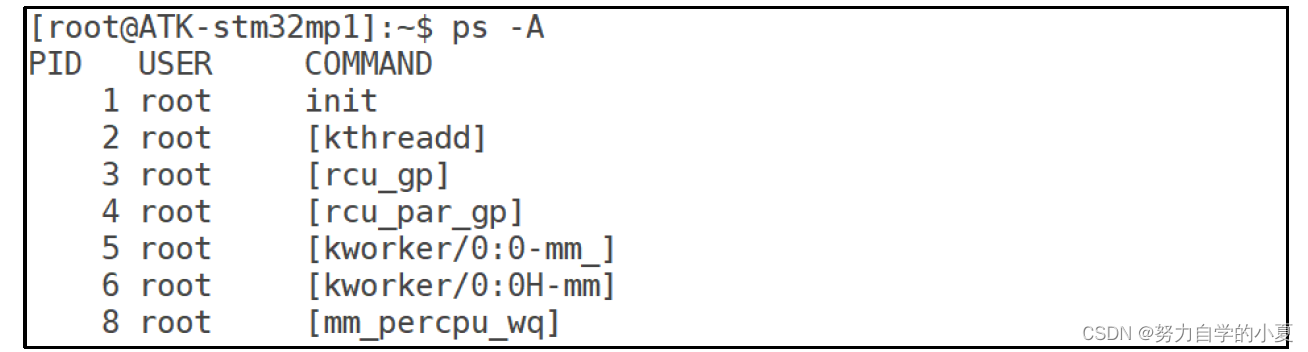
从上图可以看出,init进程的PID为 1,kthreadd进程的PID为 2。之所以上图中没有显示PID为0的idle进程,那是因为idle进程是内核进程。 接下来重点看一下init进程,kernel_init就是init进程的进程函数。
init进程
kernel_init函数就是init进程具体做的工作,定义在文件init/main.c中,函数内容如下:
示例代码16.2.5.1 kernel_init函数
1106 static int __ref kernel_init(void *unused)
1107 {
1108 int ret;
1109
1110 kernel_init_freeable(); /* init进程的一些其他初始化工作 */
1111 /* need to finish all async __init code before freeing the memory */
1112 async_synchronize_full(); /* 等待所有的异步调用执行完成 */
1113 ftrace_free_init_mem(); /* 释放init段内存 */
1114 free_initmem();
1115 mark_readonly();
1116
1117 /*
1118 * Kernel mappings are now finalized - update the userspace
1119 * page-table to finalize PTI.
1120 */
1121 pti_finalize();
1122
1123 system_state = SYSTEM_RUNNING; /* 标记系统正在运行 */
1124 numa_default_policy();
1125
1126 rcu_end_inkernel_boot();
1127
1128 if (ramdisk_execute_command) {
1129 ret = run_init_process(ramdisk_execute_command);
1130 if (!ret)
1131 return 0;
1132 pr_err("Failed to execute %s (error %d)\n",
1133 ramdisk_execute_command, ret);
1134 }
1135
1136 /*
1137 * We try each of these until one succeeds.
1138 *
1139 * The Bourne shell can be used instead of init if we are
1140 * trying to recover a really broken machine.
1141 */
1142 if (execute_command) {
1143 ret = run_init_process(execute_command);
1144 if (!ret)
1145 return 0;
1146 panic("Requested init %s failed (error %d).",
1147 execute_command, ret);
1148 }
1149 if (!try_to_run_init_process("/sbin/init") ||
1150 !try_to_run_init_process("/etc/init") ||
1151 !try_to_run_init_process("/bin/init") ||
1152 !try_to_run_init_process("/bin/sh"))
1153 return 0;
1154
1155 panic("No working init found. Try passing init= option to kernel. "
1156 "See Linux Documentation/admin-guide/init.rst for guidance.");
1157 }
第1110行, kernel_init_freeable函数用于完成 init进程的一些其他初始化工作,稍后再来具体看一下此函数。
第1128行,ramdisk_execute_command是一个全局的char指针变量,此变量值为“/init”也就是根目录下的init程序。ramdisk_execute_command也可以通过uboot传递,在bootargs中使用“rdinit=xxx”即可xxx为具体的init程序名字。
第1129行,如果存在“/init”程序的话就通过函数run_init_process来运行此程序。
第1142行,如果ramdisk_execute_command为空的话就看execute_command是否为空,反正不管如何一定要在根文件系统中找到一个可运行的 init程序。execute_command的值是通过uboot传递,在bootargs中使用“init=xxxx”就可以了,比如“init=/linuxrc”表示根文件系统中的linuxrc就是要执行的用户空间init程序。
第1149-1153行,如果ramdisk_execute_command和execute_command都为空,那么就依次查找“/sbin/init”、“/etc/init”、“/bin/init”和“/bin/sh”,这四个相当于备init 程序,如果这四个也不存在,那么Linux启动失败!
第1155行,如果以上步骤都没有找到用户空间的 init程序,那么就提示错误发生!
最后来简单看一下kernel_init_freeable函数,前面说了,kernel_init会调用此函数来做一些init进程初始化工作。kernel_init_freeable定义在文件init/main.c中,缩减后的函数内容如下:
示例代码162.5.2 kernel_init_freeable函数
1159 static noinline void __init kernel_init_freeable(void)
1160 {
1161 /*
1162 * Wait until kthreadd is all set-up.
1163 */
1164 wait_for_completion(&kthreadd_done);/* 等待kthreadd准备就绪 */
......
1185 smp_init(); /* SMP初始化 */
1186 sched_init_smp(); /* 多核(SMP)调度初始化 */
1187
1188 page_alloc_init_late(); /* 设备初始化都在此函数中完成 */
1189 /* Initialize page ext after all struct pages are initialized. */
1190 page_ext_init();
1191
1192 do_basic_setup();
1193
1194 /* Open the /dev/console on the rootfs, this should never fail */
1195 if (ksys_open((const char __user *) "/dev/console", O_RDWR, 0) < 0)
1196 pr_err("Warning: unable to open an initial console.\n");
1197
1198 (void) ksys_dup(0);
1199 (void) ksys_dup(0);
1200 /*
1201 * check if there is an early userspace init. If yes, let it
1202 * do all the work
1203 */
1204
1205 if (!ramdisk_execute_command)
1206 ramdisk_execute_command = "/init";
1207
1208 if (ksys_access((const char __user *)
1209 ramdisk_execute_command, 0) != 0) {
1210 ramdisk_execute_command = NULL;
1211 prepare_namespace();
1212 }
1213
1214 /*
1215 * Ok, we have completed the initial bootup, and
1216 * we're essentially up and running. Get rid of the
1217 * initmem segments and start the user-mode stuff..
1218 *
1219 * rootfs is available now, try loading the public keys
1220 * and default modules
1221 */
1222
1223 integrity_load_keys();
1224 }
第1192行,do_basic_setup函数用于完成Linux下设备驱动初始化工作!非常重要。do_basic_setup会调用driver_init函数完成Linux下驱动模型子系统的初始化。
第1195行,打开设备“/dev/console”,在Linux中一切皆为文件!因此“/dev/console”也是一个文件,此文件为控制台设备。每个文件都有一个文件描述符,此处打开的“/dev/console”文件描述符为0,作为标准输入(0)。
第1198和1199行,sys_dup函数将标准输入(0)的文件描述符复制了2次,一个作为标准输出(1),一个作为标准错误(2)。这样标准输入、输出、错误都是/dev/console了。 console通过uboot的bootargs环境变量设置,“console=ttySTM0,115200”表示将/dev/ttySTM0设置为console,也就是STM32MP1的串口 4。当然,也可以设置其他的设备为console,比如虚拟控制台tty1,设置tty1为console就可以在LCD屏幕上看到系统的提示信息。
第1211行,调用函数prepare_namespace来挂载根文件系统。根文件系统也是由命令行参数指定的,也就是uboot的bootargs环境变量。比如“root=/dev/mmcblk1p3 rootwait rw”就表示
根文件系统在/dev/mmcblk1p3中,也就是EMMC的分区3中。
Linux内核启动流程就分析到这里,Linux内核最终是需要和根文件系统打交道的,需要挂载根文件系统,并且执行根文件系统中的init程序,以此来进去用户态。这里就正式引出了根文件系统,根文件系统也是系统移植的最后一片拼图。Linux移植三巨头:uboot、 Linux kernel、rootfs(根文件系统)。关于根文件系统后面章节会详细的讲解,这里只需要知道Linux内核移植完成以后还需要构建根文件系统即可。
总结
正点原子的linux驱动开发文档中,关于linux内核的讲解就是这么多,不像之前uboot一样那么详尽,因为linux内核真的非常庞大复杂!只需要关注当中截取出来的有中文注释的代码也就可以了,之后可以自己去查看源码学习其中的每一个函数。
从链接脚本vmlinux.lds出发,可以看出Linux内核入口在stext,会调用safe_svcmode_maskall确保CPU处于SVC模式并关闭所有中断,然后读取处理器ID并调用__lookup_processor_type查看当前系统是否支持此CPU,支持就会获取procinfo信息读取这个处理器的各种参数;调用__vet_atags验证atags或设备树,且STM32MP157是双核A7,会调用__fixup_smp处理多核;调用__create_page_tables创建页表;将__mmap_switched存入r13中,最后调用__enable_mmu使能MMU,这个函数最终调用__turn_mmu_on函数执行在r13中的__mmap_switched函数。
__mmap_switched经过汇编操作寄存器,最终调用start_kernel启动Linux内核,而start_kernel就是我们重点关注的函数,有中文注释,有需求可以对每个函数源码进行解读。
start_kernel最终调用了rest_init函数,这个函数会调用rcu_scheduler_starting启动RCU锁调度器,然后调用kernel_thread创建kernel_init进程,也就是init进程,其PID为1;调用kernel_thread创建kthreadd内核进程,其PID为2,负责所有内核进程的管理和调度;最后调用cpu_startup_entry进入idle进程,其PID为0,也就是空闲进程,并会调用kernel_thread创建。
kernel_init进程函数是在init进程中的,这就是init进程具体的工作,会调用kernel_init_freeable完成init进程其他的初始化工作;之后会通过对全局char指针变量ramdisk_execute_command(值为/init),也就是根目录的init程序判断是否可以init,如果有就调用run_init_process运行,如果没有就会看execute_command(通过uboot传递,在bootargs使用"init=xxxx"就可以)来找到可运行的init程序;如果还是没有,就会直接一次查找备用init(“/sbin/init”,“/etc/init”,“/bin/init"以及”/bin/sh"),如果还是没有就发生错误了。
kernel_init_freeable函数,会调用do_basic_setup用于Linux下设备驱动初始化工作,其中会调用driver_init完成驱动模型子系统初始化;然后会打开设备“/dev/console”,调用sys_dup复制两次,保证标准输入、输出、错误都是/dev/console,一般会设置为/dev/ttySTM0,也就是STM32MP1的串口4;调用prepare_namespace挂载根目录。