uboot的移植并不是说从零开始将uboot移植到所使用的开发板或者开发平台上。这个对于我们开发者来说基本是不可能的,这个工作一般是半导体厂商做的,半导体厂商负责将uboot移植到他们的芯片上,因此半导体厂商都会自己做一个开发板,这个开发板就叫做原厂开发板,比如我们现在学习STM32的时候听说过的discover开发板就是ST自己做的。半导体厂商将uboot移植到自己的原厂开 发板上,测试好以后就会将这个uboot发布出去,这就是大家常说的原厂BSP包。一般做产品的时候就会参考原厂的开发板做硬件,然后在原
厂提供的BSP包上做修改,将uboot或者linux kernel移植到硬件上。这就是uboot移植的一般流程:
- 在uboot中找到参考的开发平台,一般是原厂的开发板。
- 参考原厂开发板移植uboot到所使用的开发板。
正点原子STM32MP157开发板参考的是ST官方的 STM32MP157 EVK开发板做的硬件,因此在移植uboot的时候就可以以ST官方的STM32MP157 EVK开发板为蓝本。
ST官方U-boot编译测试
ST官方uboot源码打补丁
获取ST官方uboot源码
首先肯定要获取到ST官方的 uboot源码,这在之前最开始的uboot学习笔记,也就是uboot使用中已经获取过了,进入到对应的uboot源码目录,命令如下:
| cd /home/zuozhongkai/linux/atk-mp1/stm32mp1-openstlinux-5.4-dunfell-mp1-20-06-24/sources/arm-ostl-linux-gnueabi/u-boot-stm32mp-2020.01-r0 //进入ST官方uboot源码 |
ST官方uboot源码如下图所示:
从上图可以看出, ST官方的uboot源码跟TF-A的源码包文件夹内容格式基本一样,包括了补丁文件.patch、Makefile.sdk和uboot源码压缩包,只是uboot有多个.patch补丁文件,打补丁的时候这些.patch都要用到。
之后解压上图中u-boot-stm32mp-2020.01-r0.tar.gz这个真正的源码包压缩包,解压命令如下:
| tar -vxf u-boot-stm32mp-2020.01-r0.tar.gz |
解压完成以后就会得到一个名为“u-boot-stm32mp-2020.01”的uboot源码文件夹。
打补丁
解压得到uboot的源码文件后,就要对其进行打补丁,进入到上面解压出来的u-boot-stmmp-2020.01目录,然后执行对应的打补丁命令:
| cd u-boot-stm32mp-2020.01/ //进入 uboot源码目录 for p in `ls -1 ../*.patch`;do patch -p1 < $p;done //打补丁 |
打补丁结果如下图所示:
打完补丁以后的u-boot-stm32mp-2020.01目录就是要移植uboot源码,但是上图中的u-boot-stm32mp-2020.01目录路径有点长,不适合阅读和编译。所以可以新建一个名为“my_uboot”的目录来保存要移植的uboot源码,然后将ST官方的 uboot源码拷贝到“my_uboot”目录下,命令如下:
| cd /home/zuozhongkai/linux/atk-mp1/stm32mp1-openstlinux-5.4-dunfell-mp1-20-06-24/sources/arm-ostl-linux-gnueabi/u-boot-stm32mp-2020.01-r0/u-boot-stm32mp-2020.01 cp * /home/zuozhongkai/linux/atk-mp1/uboot/my_uboot/ -rf //拷贝到my_uboot目录下 |
拷贝完成后的my_uboot目录如下图所示:

最后可以创建一个VSCode工程,方便阅读和移植。
编译ST官方uboot源码
修改Makefile
首先修改一下uboot源码的Makefile文件,也可以不修改,但是在编译的时候需要多输入一些参数,为了偷懒,还是修改一下。修改方法已经在 之前的uboot使用笔记中有过讲解,就是在Makefile文件里面添加ARCH和CROSS_COMPILE这两个变量的值,如下图所示:

ST官方uboot肯定适配了官方的STM32MP1 EVK开发板,现在就编译EVK开发板对应的uboot,编译完成以后将得到的uboot可执行文件烧写到正点原子的STM32MP1开发板中,看看能不能运行,不能的话就要修改uboot相应的文件,这就是uboot的移植。编译命令如下:
| make stm32mp15_trusted_defconfig make DEVICE_TREE=stm32mp157d-ev1 all -j8 |
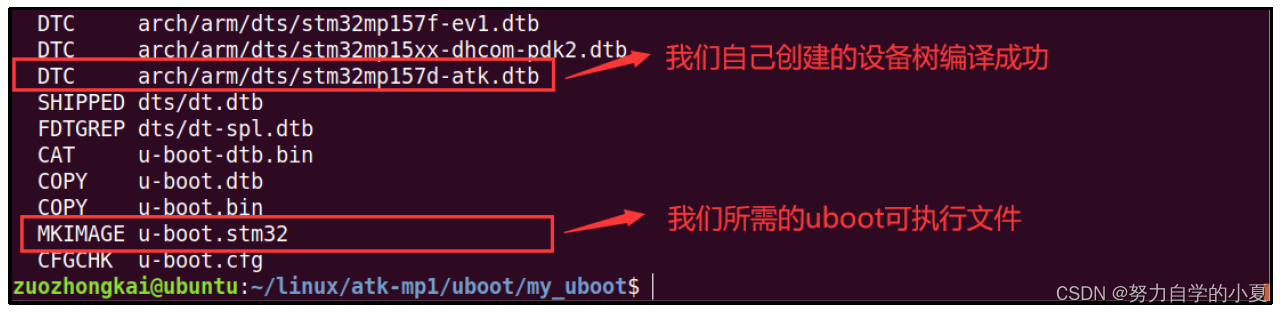
编译完成后如下图所示:
编译完成后就会得到uboot可执行文件,如下图所示:
从上图可以看出,uboot编译成功,生成了u-boot.bin和u-boot.stm32;u-boot.bin包含了设备树(dtb),也就是将uboot镜像和设备树打包在了一起。 其中u-boot.stm32是在u-boot.bin前面添加了256字节头部信息的可执行文件,是要烧写到开发板里面的。
烧写测试
上一小节编译出了ST官方EVK开发板对应的u-boot.stm32,本节将其烧写到正点原子的开发板中,看看能不能启动。这里烧写需要注意一下,不能直接用上面编译成功图中的u-boot.stm32文件替换以前images目录下的u-boot.stm32。前面说了STM23CubeProgrammer烧写原理就是先向开发板的DDR里面下载一个完整的uboot进去,然后用这个uboot来烧写系统。所以必须保证这个下载到DDR里面的uboot是工作正常的,但是我们刚刚编译出来的uboot可执行文件肯定是有问题的,所以下载到DDR中的uboot必须用正点原子提供的,烧写到EMMC里面的是我们刚刚编译的,这两个 uboot要区分开。
将上图中的u-boot.stm32重命名为my-u-boot.stm32,一定要重命名!然后将重命名以后的my-u-boot.stm32放到images目录下。还需要修改一下Flashlayouts文件,修改一下烧写到 EMMC里面的uboot名字,如下图所示:

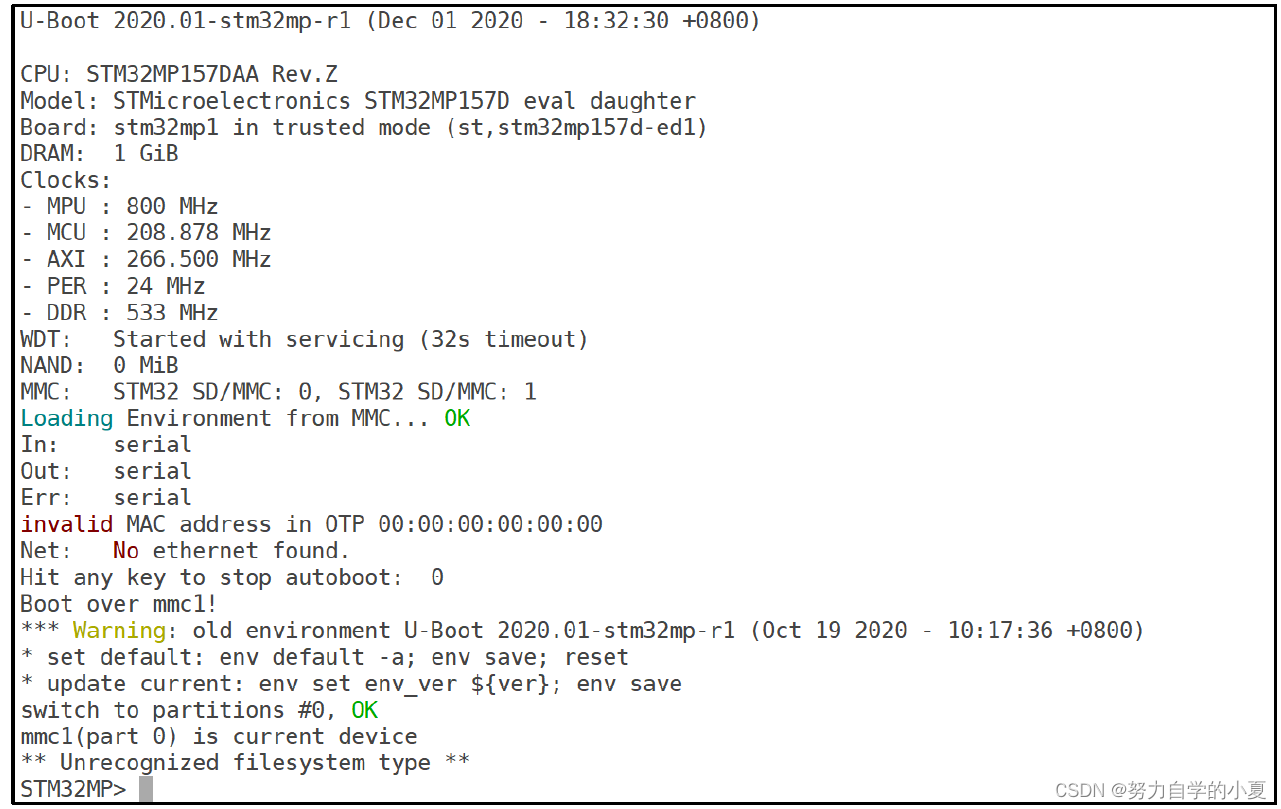
完成后就可以烧写了,烧写完成后从EMMC启动,此时会发现开发板一直在重启,其中uboot启动过程如下图所示:
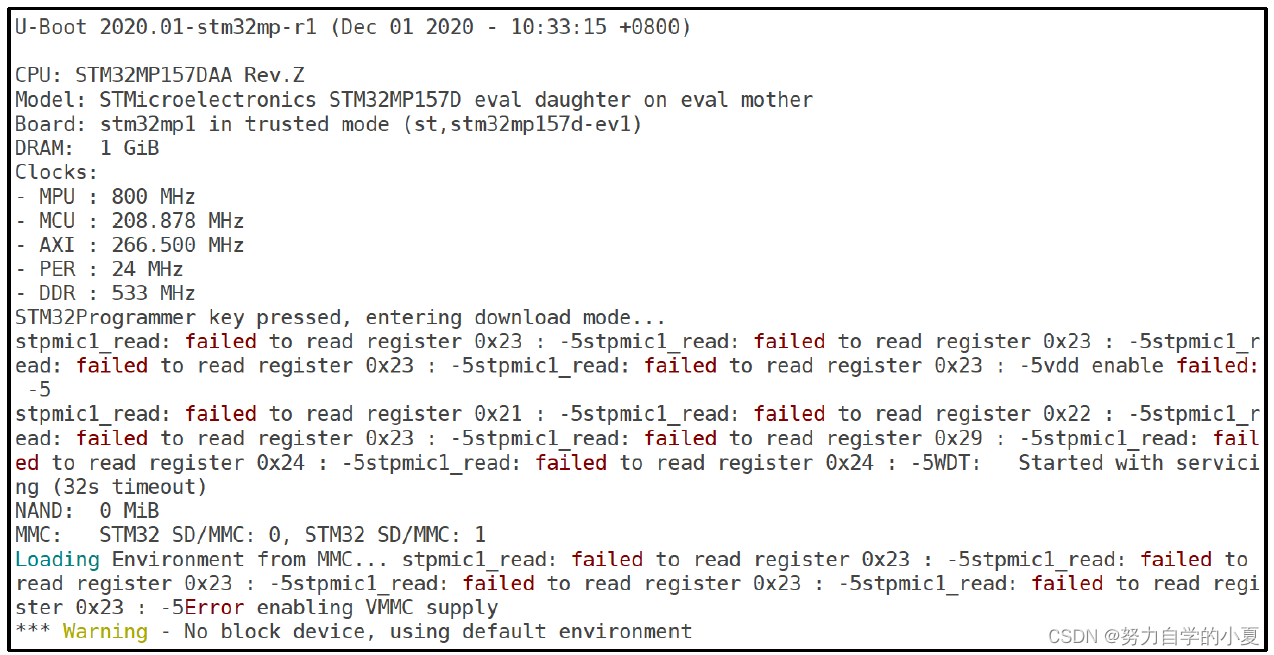
从上图可以看出以下几个重要的信息:
- uboot能运行,也就是说ST官方EVK开发板的uboot可以直接在正点原子的开发板
上运行,但是运行会出错! - uboot版本为2020.01,编译日期为2020年12月1日,10:33:15,说明就是刚刚自行编译的uboot。
- 出现了“stpmic1_read: failed to read register”错误,前面讲解TF-A的时候已经说了,ST官方EVK开发板使用了电源管理芯片STPMIC1A,所以uboot运行的时候会初始化这个PMIC芯片,但是正点原子开发板并没有使用这个PMIC芯片,所以就会报STPMIC错误!
接下来就是一步步修改uboot,直至其可以正常工作,也就是所谓的uboot移植。
在U-boot中添加自己的开发板
创建默认配置文件
首先创建自己所使用开发板对应的默认配置文件,在第一次编译uboot的时候先执行:
| make stm32mp15_trusted_defconfig |
上面命令的意思就是先使用默认配置文件配置一下uboot stm32mp15_trusted_defconfig这个文件保存了默认配置选项。默认配置文件创建方法很简单,既然正点原子开发板参考了ST官方的EVK开发板,那么默认配置文件也可以直接参考官方的EVK开发板。在uboot的源码目录下,运行以下命令:
| cd configs //进入uboot的configs目录 cp stm32mp15_trusted_defconfig stm32mp15_atk_trusted_defconfig //拷贝 |
此时在uboot的configs目录下就存在一个名为“stm32mp15_atk_trusted_defconfig”的默认配置文件,这个默认配置文件就是给我们开发板使用的。
创建默认配置设备树
另外还要创建自己所使用开发板对应的设备树,方法也很简单,直接复制ST官方EVK开发板对应的设备树,在uboot的源码目录下,运行以下命令:
| cd arch/arm/dts/ //进入uboot设备树目录 cp stm32mp157d-ed1.dts stm32mp157d-atk.dts //复制.dts cp stm32mp15xx-edx.dtsi stm32mp157d-atk.dtsi //复制.dtsi cp stm32mp157a-ed1-u-boot.dtsi stm32mp157d-atk-u-boot.dtsi //复制.dtsi |
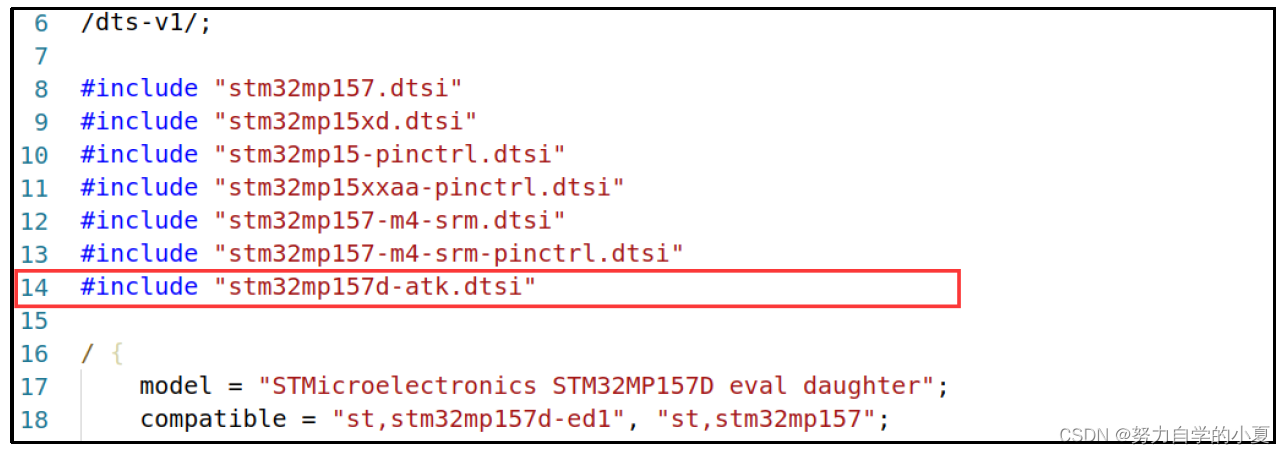
打开stm32mp157d-atk.dts文件,要修改一下其中的一个头文件引用,stm32mp157d-atk.dts默认头文件引用如下:
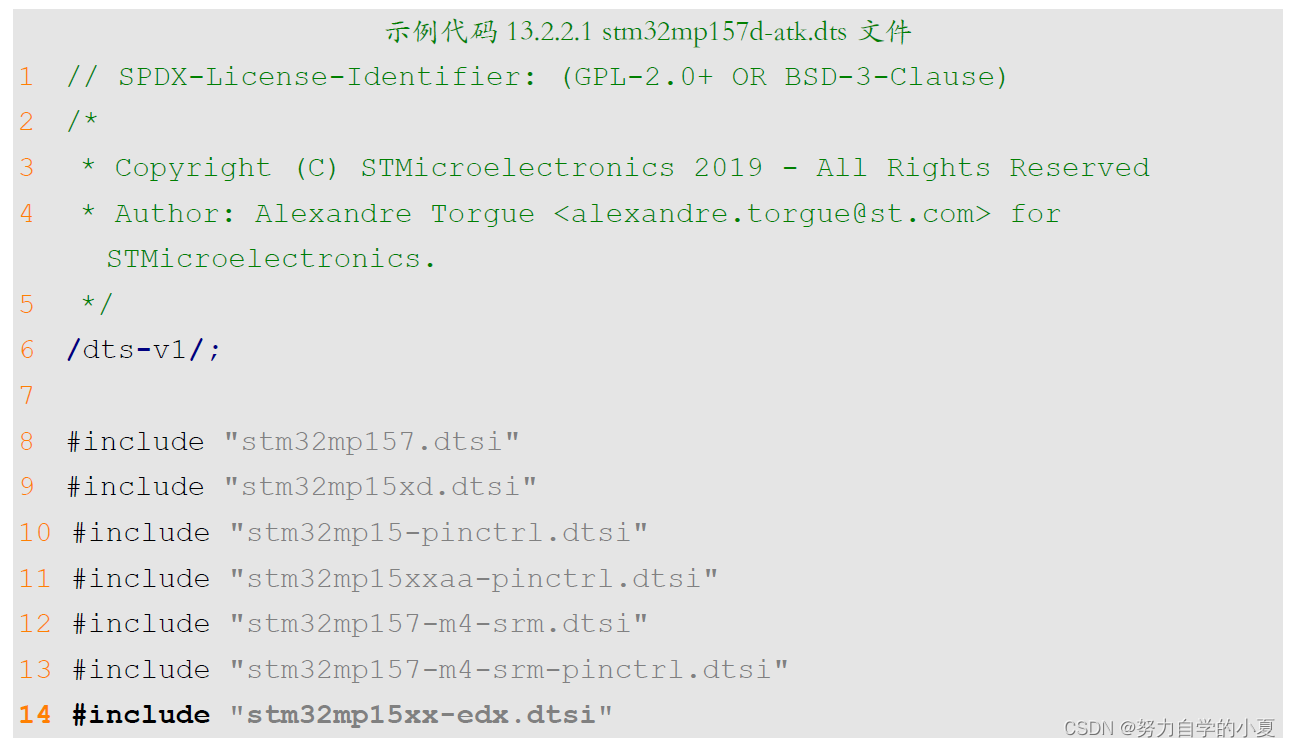
注意,第14行引用的是stm32mp15xx-edx.dtsi这个设备树头文件,要将其改为上面创建的stm32mp15d-atk.dtsi,修改以后如下图所示:
修改电源管理设置
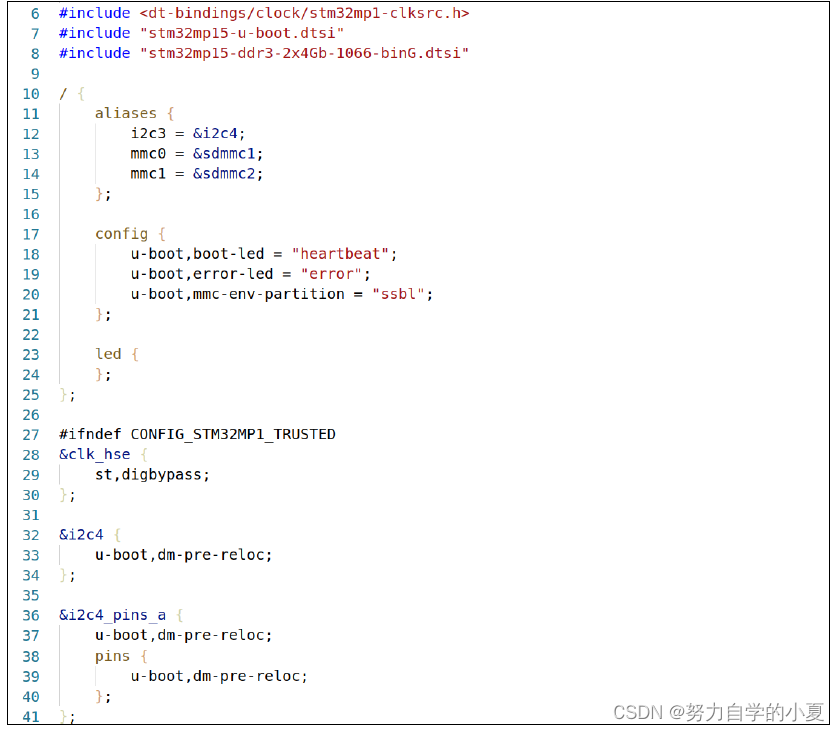
打开之前创建的stm32mp157d-atk-u-boot.dtsi文件,前53行内容如下:
示例代码13.2.3.1 stm32mp157d-atk-u-boot.dtsi文件
1 // SPDX-License-Identifier: GPL-2.0+ OR BSD-3-Clause
2 /*
3 * Copyright : STMicroelectronics 2018
4 */
5
6 #include <dt-bindings/clock/stm32mp1-clksrc.h>
7 #include "stm32mp15-u-boot.dtsi"
8 #include "stm32mp15-ddr3-2x4Gb-1066-binG.dtsi"
9
10 / {
11 aliases {
12 i2c3 = &i2c4;
13 mmc0 = &sdmmc1;
14 mmc1 = &sdmmc2;
15 };
16
17 config {
18 u-boot,boot-led = "heartbeat";
19 u-boot,error-led = "error";
20 u-boot,mmc-env-partition = "ssbl";
21 st,fastboot-gpios = <&gpioa 13 GPIO_ACTIVE_LOW>;
22 st,stm32prog-gpios = <&gpioa 14 GPIO_ACTIVE_LOW>;
23 };
24
25 led {
26 red {
27 label = "error";
28 gpios = <&gpioa 13 GPIO_ACTIVE_LOW>;
29 default-state = "off";
30 status = "okay";
31 };
32 };
33 };
34
35 #ifndef CONFIG_STM32MP1_TRUSTED
36 &clk_hse {
37 st,digbypass;
38 };
39
40 &i2c4 {
41 u-boot,dm-pre-reloc;
42 };
43
44 &i2c4_pins_a {
45 u-boot,dm-pre-reloc;
46 pins {
47 u-boot,dm-pre-reloc;
48 };
49 };
50
51 &pmic {
52 u-boot,dm-pre-reloc;
53 };
把示例代码13.2.3.1中的的21-22行、26-31行和51~53行都删除,删除以后如下图所示:
接着修改stm32mp157d-atk.dtsi文件,找到如下所示代码:
90 &adc {
91 /* ANA0, ANA1 are dedicated pins and don't need pinctrl: only in6. */
92 pinctrl-0 = <&adc1_in6_pins_a>;
93 pinctrl-names = "default";
94 vdd-supply = <&vdd>;
95 vdda-supply = <&vdda>;
96 vref-supply = <&vdda>;
97 status = "disabled";
98 adc1: adc@0 {
99 st,adc-channels = <0 1 6>;
100 /* 16.5 ck_cycles sampling time */
101 st,min-sample-time-nsecs = <400>;
102 status = "okay";
103 };
104 };
105
106 &cpu0{
107 cpu-supply = <&vddcore>;
108 };
109
110 &crc1 {
111 status = "okay";
112 };
113
114 &dac {
115 pinctrl-names = "default";
116 pinctrl-0 = <&dac_ch1_pins_a &dac_ch2_pins_a>;
117 vref-supply = <&vdda>;
118 status = "disabled";
119 dac1: dac@1 {
120 status = "okay";
121 };
122 dac2: dac@2 {
123 status = "okay";
124 };
125 };
126
127 &dma1 {
128 sram = <&dma_pool>;
129 };
......
142
143 &i2c4 {
144 pinctrl-names = "default", "sleep";
145 pinctrl-0 = <&i2c4_pins_a>;
146 pinctrl-1 = <&i2c4_pins_sleep_a>;
147 i2c-scl-rising-time-ns = <185>;
148 i2c-scl-falling-time-ns = <20>;
149 clock-frequency = <400000>;
150 status = "okay";
151 /* spare dmas for other usage */
152 /delete-property/dmas;
153 /delete-property/dma-names;
154
155 pmic: stpmic@33 {
156 compatible = "st,stpmic1";
157 reg = <0x33>;
158 interrupts-extended = <&exti_pwr 55 IRQ_TYPE_EDGE_FALLING>;
159 interrupt-controller;
160 #interrupt-cells = <2>;
161 status = "okay";
162
163 regulators {
164 compatible = "st,stpmic1-regulators";
165 buck1-supply = <&vin>;
166 buck2-supply = <&vin>;
167 buck3-supply = <&vin>;
168 buck4-supply = <&vin>;
169 ldo1-supply = <&v3v3>;
170 ldo2-supply = <&v3v3>;
171 ldo3-supply = <&vdd_ddr>;
172 ldo4-supply = <&vin>;
173 ldo5-supply = <&v3v3>;
174 ldo6-supply = <&v3v3>;
175 vref_ddr-supply = <&vin>;
176 boost-supply = <&vin>;
177 pwr_sw1-supply = <&bst_out>;
178 pwr_sw2-supply = <&bst_out>;
179
180 vddcore: buck1 {
181 regulator-name = "vddcore";
182 regulator-min-microvolt = <1200000>;
183 regulator-max-microvolt = <1350000>;
184 regulator-always-on;
185 regulator-initial-mode = <0>;
186 regulator-over-current-protection;
187 };
......
278 vbus_sw: pwr_sw2 {
279 regulator-name = "vbus_sw";
280 interrupts = <IT_OCP_SWOUT 0>;
281 regulator-active-discharge = <1>;
282 };
283 };
284
285 onkey {
286 compatible = "st,stpmic1-onkey";
287 interrupts = <IT_PONKEY_F 0>, <IT_PONKEY_R 0>;
288 interrupt-names = "onkey-falling", "onkey-rising";
289 power-off-time-sec = <10>;
290 status = "okay";
291 };
292
293 watchdog {
294 compatible = "st,stpmic1-wdt"; 295 status = "disabled";
296 };
297 };
298 };
将示例代码13.2.3.2中90-104行的adc节点、114-125行的dac节点以及143-298行的i2c4节点全部删除掉,删除以后如下图所示:
继续修改stm32mp157d-atk.dtsi文件,找到如下所示代码:
示例代码13.2.3.3 stm32mp157d-atk.dtsi代码段
58 led {
59 compatible = "gpio-leds";
60 blue {
61 label = "heartbeat";
62 gpios = <&gpiod 9 GPIO_ACTIVE_HIGH>;
63 linux,default-trigger = "heartbeat";
64 default-state = "off";
65 };
66 };
67
68 sd_switch: regulator-sd_switch {
69 compatible = "regulator-gpio";
70 regulator-name = "sd_switch";
71 regulator-min-microvolt = <1800000>;
72 regulator-max-microvolt = <2900000>;
73 regulator-type = "voltage";
74 regulator-always-on;
75
76 gpios = <&gpiof 14 GPIO_ACTIVE_HIGH>;
77 gpios-states = <0>;
78 states = <1800000 0x1 2900000 0x0>;
79 };
上述代码是led和sd_switch节点信息,将这两个节点都删除掉,这两个节点删除以后如下图所示:
最后需要向stm32mp157d-atk.dtsi文件的根节点‘/’下添加自己的电源管理配置,将下面的代码添加到上图中的58行处:
示例代码13.2.3.4 要添加的电源管理配置节点
1 vddcore: regulator-vddcore {
2 compatible = "regulator-fixed";
3 regulator-name = "vddcore";
4 regulator-min-microvolt = <1200000>;
5 regulator-max-microvolt = <1350000>;
6 regulator-always-on;
7 regulator-boot-on;
8 };
9
10 v3v3: regulator-3p3v {
11 compatible = "regulator-fixed";
12 regulator-name = "v3v3";
13 regulator-min-microvolt = <3300000>;
14 regulator-max-microvolt = <3300000>;
15 regulator-always-on;
16 regulator-boot-on;
17 };
18
19 v1v8_audio: regulator-v1v8-audio {
20 compatible = "regulator-fixed";
21 regulator-name = "v1v8_audio";
22 regulator-min-microvolt = <1800000>;
23 regulator-max-microvolt = <1800000>;
24 regulator-always-on;
25 regulator-boot-on;
26 };
27
28 vdd: regulator-vdd {
29 compatible = "regulator-fixed";
30 regulator-name = "vdd";
31 regulator-min-microvolt = <3300000>;
32 regulator-max-microvolt = <3300000>;
33 regulator-always-on;
34 regulator-boot-on;
35 };
36
37 vdd_usb: regulator-vdd-usb {
38 compatible = "regulator-fixed";
39 regulator-name = "vdd_usb";
40 regulator-min-microvolt = <3300000>;
41 regulator-max-microvolt = <3300000>;
42 regulator-always-on;
43 regulator-boot-on;
44 };
上述代码定义了5个电源节点,分别为:vddcore、v3v3、v1v8_audio、vdd和vdd_usb,至此,电源管理相关配置已经设置好了。
修改TF卡和EMMC配置
继续修改stm32mp157d-atk.dtsi文件,找到sdmmc1和sdmmc2这两个节点,将这两个节点改为如下所示内容:
示例代码13.2.4.1 修改后的sdmmc1和sdmmc2节点
1 &sdmmc1 {
2 pinctrl-names = "default", "opendrain", "sleep";
3 pinctrl-0 = <&sdmmc1_b4_pins_a>;
4 pinctrl-1 = <&sdmmc1_b4_od_pins_a>;
5 pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;
6 st,neg-edge;
7 broken-cd;
8 bus-width = <4>;
9 vmmc-supply = <&v3v3>;
10 status = "okay";
11 };
12
13 &sdmmc2 {
14 pinctrl-names = "default", "opendrain", "sleep";
15 pinctrl-0 = <&sdmmc2_b4_pins_a &sdmmc2_d47_pins_a>;
16 pinctrl-1 = <&sdmmc2_b4_od_pins_a &sdmmc2_d47_pins_a>;
17 pinctrl-2 = <&sdmmc2_b4_sleep_pins_a &sdmmc2_d47_sleep_pins_a>;
18 non-removable;
19 st,neg-edge;
20 bus-width = <8>;
21 vmmc-supply = <&v3v3>;
22 keep-power-in-suspend;
23 status = "okay";
24 };
编译uboot
接下来可以先编译一下uboot,在编译之前现在stm32mp157d-atk.dtsi文件中找到usbotg_hs节点,此节点默认内容如下:

此节点定义了USB_OTG的电源配置,ST官方开发板的USB_OTG电源也是通过PMIC配置的,所以USB_OTG电源配置也要修改,但是这里要先测试一下当前修改后的uboot能不能运行,因此先不改USB_OTG电源,所以先将示例代码13.2.5.1中的 usbotg_hs节点屏蔽掉,防止编译报错。
在编译uboot之前要先让编译器知道我们要编译哪个设备树文件,打开arch/arm/dts/Makefile文件,找到“dtb-$(CONFIG_STM32MP15x)”配置项,然后在此配置项中加入“stm32mp157d-atk.dtb”,添加完以后如下图所示:
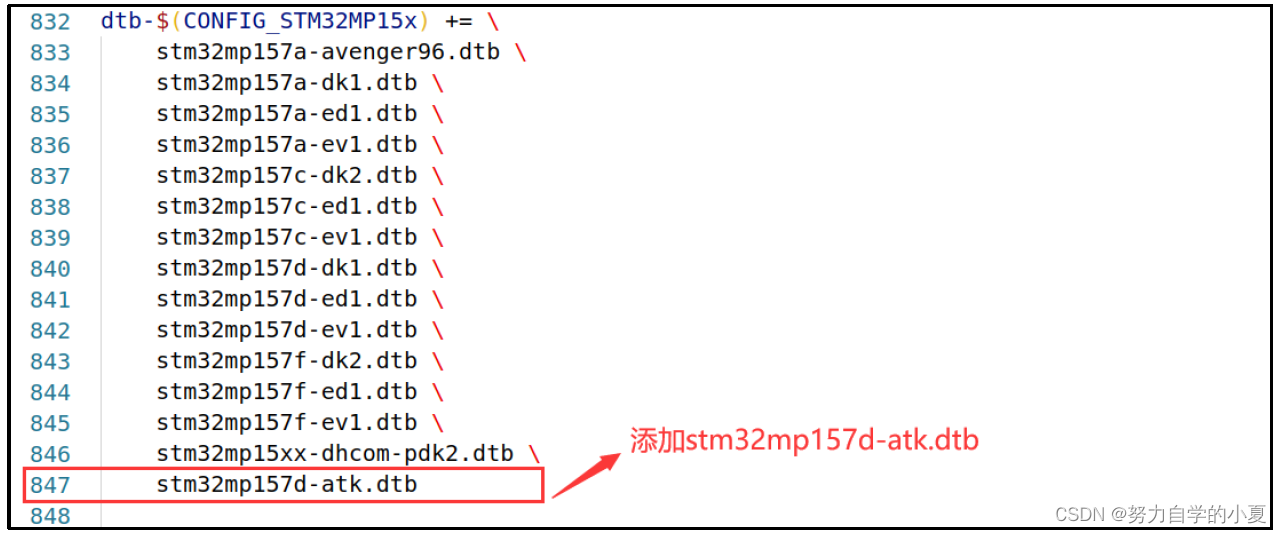
上图中第847行里就是告诉“Makefile”把我们刚新建的stm32mp157d-atk.bts编译成对应的dtb文件。以前编译uboot都是自己输入一条一条命令编译,可以创建一个shell脚本,将所有的编译命令都写到这个shell脚本里面,然后每次的时候只需要执行一下这个shell脚本即可。在uboot源码根目录下新建一个名为stm32mp157d_alientek.sh的shell 脚本,在这个shell脚本里面输入如下内容:
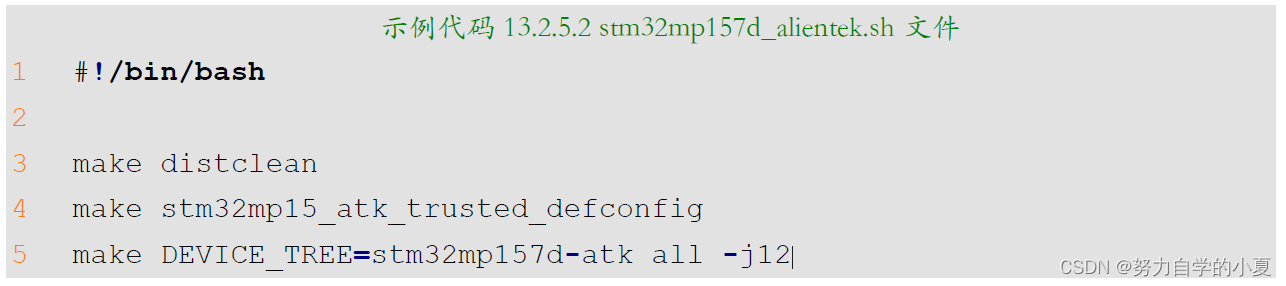
第3行清零uboot。
第4行使用stm32mp15_atk_trusted_defconfig来配置uboot。
第5行编译uboot,设备树为stm32mp157d-atk.dts。
给予stm32mp157d_alientek.sh可执行权限,然后运行脚本来完成编译,命令如下:
| chmod 777 stm32mp157d_alientek.sh //给予可执行权限,一次即可 ./stm32mp157d_alientek.sh //运行脚本编译 uboot |
编译成功后会出现如下图所示信息:
从上图可以看出,stm32mp157d-atk.dts已经编译成功,生成了对应的stm32mp157d-atk.dtb文件,u-boot.stm32就是要烧写测试的,要先将其重命名为my-u-boot.stm32,然后再烧写进去。
烧写完成以后 uboot启动过程如下图所示:
从上图可以看出,uboot启动成功,并且进入了命令行模式,并且命令行也可以正常操作,那么是不是说明uboot已经移植成功了呢?不一定,uboot有没有移植成功取决于当前uboot能不能满足要求,如果不满足就说明还没移植成功。
当前uboot的网络、 USB_OTG也不能正常工作,所以还需要接着修改。
网络驱动修改
网络设备树修改
从上图可以看到“Net: No ethernet found.”这一行,这样行的意思就是没有找到网络,说明uboot下的网路驱动有问题 。原因是当前设备树并没有网络相关节点,只需要将网络相关节点加进去就可以了。打开stm32mp157d-atk.dtsi文件,将如下所示的ethernet0节点加添加到最后面:
示例代码13.2.6.1 ethernet0节点
1 ðernet0 {
2 status = "okay";
3 pinctrl-0 = <ðernet0_rgmii_pins_a>;
4 pinctrl-1 = <ðernet0_rgmii_pins_sleep_a>;
5 pinctrl-names = "default", "sleep";
6 phy-mode = "rgmii-id";
7 max-speed = <1000>;
8 phy-handle = <&phy0>;
9
10 mdio0 {
11 #address-cells = <1>;
12 #size-cells = <0>;
13 compatible = "snps,dwmac-mdio";
14 phy0: ethernet-phy@0 {
15 reg = <0>;
16 };
17 };
18 };
添加完成后如下图所示:

至此,网络节点已经添加到设备树中。
网络驱动修改
正点原子V1.3及以后版本的核心板开始将网络PHY芯片更换为了国产裕太电子的YT8511,所以需要修改一下驱动。 YT8511驱动源码以及修改方法已经放到了开发板光盘中,就是 phy.c。 phy.c是正点原子修改后支持YT8511芯片的文件,此文件同时支持RTL8211以及YT8511。用修改后的phy.c文件替换掉uboot下的/drivers/net/phy/phy.c文件即可,设备树无需做任何修改,直接编译即可。
注意,正点原子V1.2版本核心板上使用的RTL8211,其PHY地址为 0X01。V1.3以后的核心板使用YT8511,其PHY地址为0X00,因此在设备树里面需要修改PHY地址为0X00。但是这样修改以后会导致YT8511和RTL8211的设备树不兼容,需要多编写一份设备树,导致出厂设备树过多。因此为了一个设备树兼容YT8511和RTL8211,正点原子修改了phy.c文件中的 phy_connect函数,直接给定YT8511的地址为0X00,也就是不受设备树控制,如下图所示:

这种做法虽然不合规则,但是也是为了一个设备树兼容两个地址不同的PHY芯片而不得已采取的方法。
编译测试
重新编译uboot并烧写,uboot启动过程如下图所示:
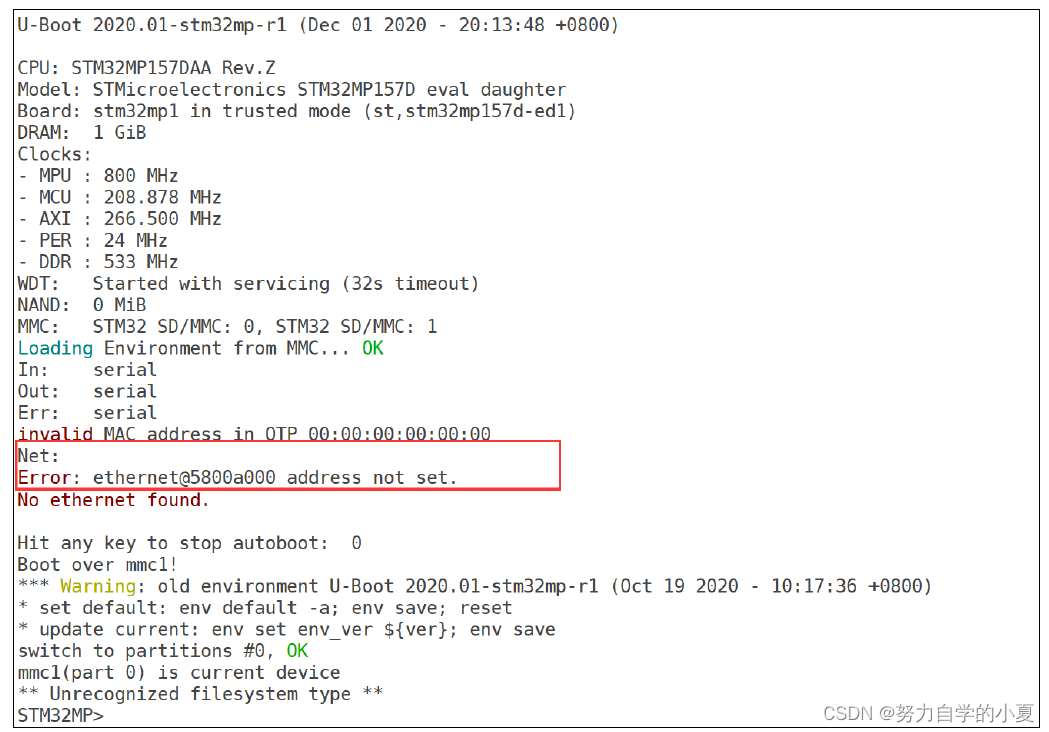
从上图中可以看到“ethernet@5800a00 address not set.”字样,说明已经找到了网络外设并且网络外设已经启动,但是还是会报“No ethernet found.”错误,这是因为uboot启动的时候获取不到MAC地址,我们只需要设置一些地址相关的环境变量即可,之前笔记中的uboot的网络相关命令已经有学习过了,命令如下:
| setenv ipaddr 192.168.1.250 //开发板IP地址 setenv ethaddr 00:04:9f:04:d2:35 //开发板网卡MAC地址 setenv gatewayip 192.168.1.1 //开发板默认网关 setenv netmask 255.255.255.0 //开发板子网掩码 setenv serverip 192.168.1.249 //服务器地址,也就是Ubuntu地址 saveenv |
设置好地址相关环境变量以后就可以在uboot中使用网络了,用网线将开发板上的网络接口与电脑或者路由器连接起来,保证开发板和电脑在同一个网段内,通过ping命令来测试一下网络连接,命令如下:
| ping 192.168.1.249 |
结果如下图所示:

从上图中可以看到“host 192.168.1.249 is alive”这句,表明ping主机成功,说明网络工作正常。
USB OTG设备树修改
添加usb_phy_tuning子节点
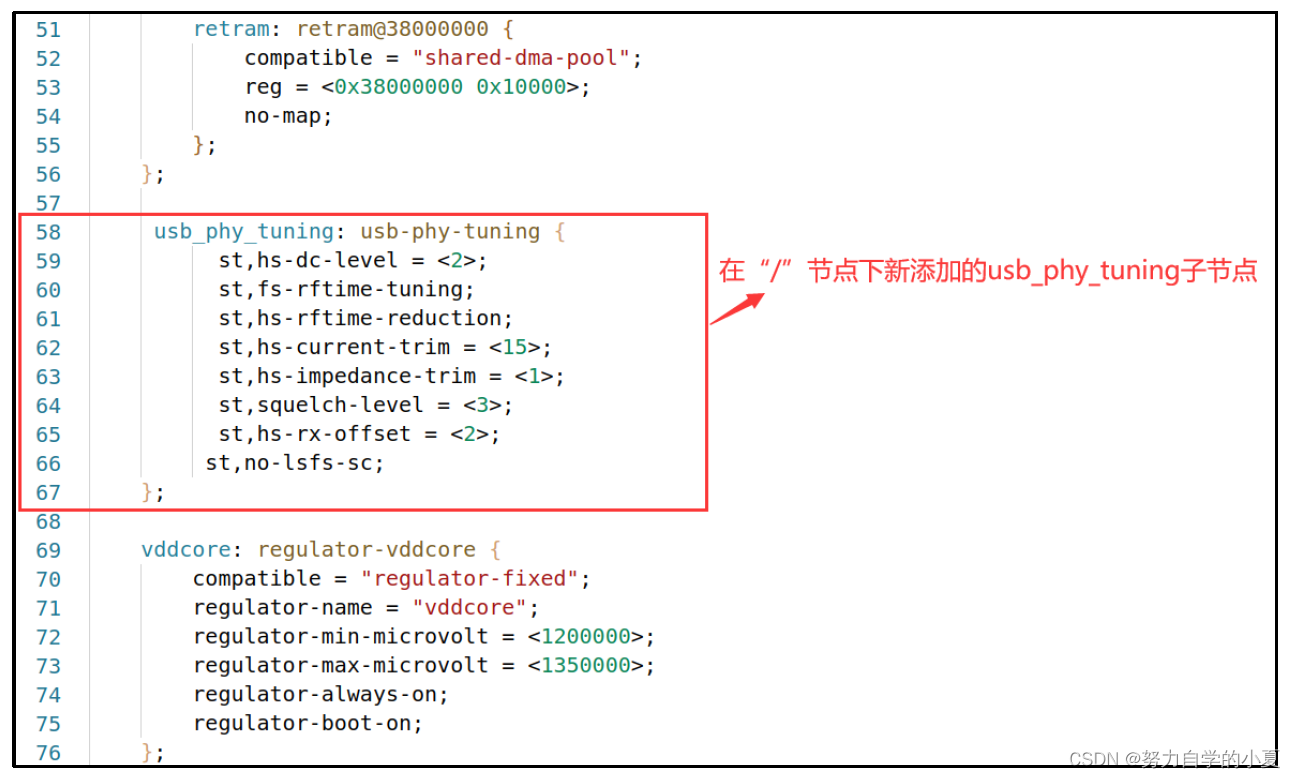
在这一小节里,给uboot添加USB_OTG功能,操作stm32mp157d-atk.dtsi这个文件,在根节点“/”下添加名为“usb_phy_tuning”的子节点,节点内容如下:
示例代码13.2.7.1 usb_phy_tuning节点
1 usb_phy_tuning: usb-phy-tuning {
2 st,hs-dc-level = <2>;
3 st,fs-rftime-tuning;
4 st,hs-rftime-reduction;
5 st,hs-current-trim = <15>;
6 st,hs-impedance-trim = <1>;
7 st,squelch-level = <3>;
8 st,hs-rx-offset = <2>;
9 st,no-lsfs-sc;
10 };
添加STUSB1600 I2C子节点
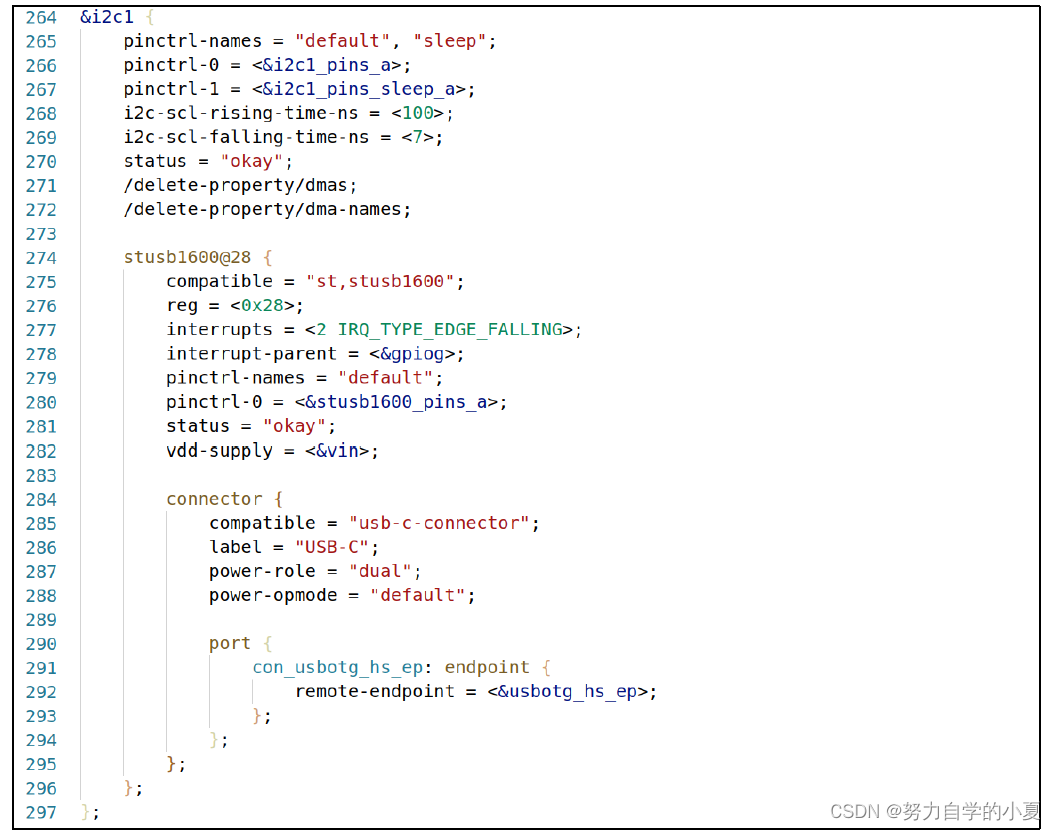
正点原子STM32MP157开发板上的USB OTG接口类型为Type-C,使用STUSB1600芯片来实现此接口功能,STUSB1600有一个I2C接口,此I2C接口用来配置芯片,因此还需要在设备树中添加STUSB1600相关的I2C节点内容。将如下内容添加到stm32mp157d-atk.dtsi的最后面:
示例代码13.2.7.2 stusb1600芯片i2c节点
1 &i2c1 {
2 pinctrl-names = "default", "sleep";
3 pinctrl-0 = <&i2c1_pins_a>;
4 pinctrl-1 = <&i2c1_pins_sleep_a>;
5 i2c-scl-rising-time-ns = <100>;
6 i2c-scl-falling-time-ns = <7>;
7 status = "okay";
8 /delete-property/dmas;
9 /delete-property/dma-names;
10
11 stusb1600@28 {
12 compatible = "st,stusb1600";
13 reg = <0x28>;
14 interrupts = <2 IRQ_T YPE_EDGE_FALLING>;
15 interrupt-parent = <&gpiog>;
16 pinctrl-names = "default";
17 pinctrl-0 = <&stusb1600_pins_a>;
18 status = "okay";
19 vdd-supply = <&vin>;
20
21 connector {
22 compatible = "usb-c-connector";
23 label = "USB-C";
24 power-role = "dual";
25 power-opmode = "default";
26
27 port {
28 con_usbotg_hs_ep: endpoint {
29 remote-endpoint = <&usbotg_hs_ep>;
30 };
31 };
32 };
33 };
34 };
由于STUSB1600是挂在STM32MP157的I2C1接口下,因此示例代码13.2.7.2是向I2C1节点追加内容,完成以后如下图所示:
添加usb接口相关节点
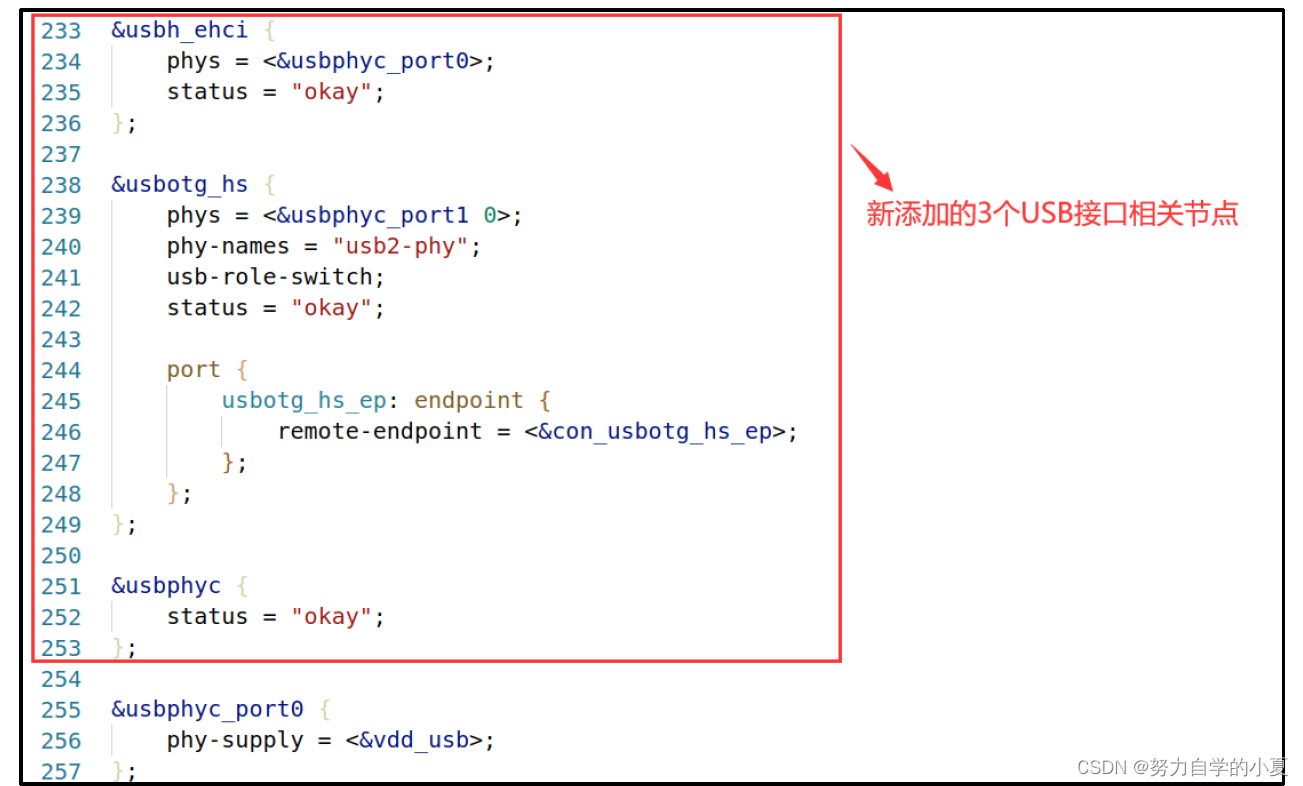
继续向stm32mp157d-atk.dtsi文件添加USB接口相关节点内容,内容如下:
示例代码13.2.7.3 usb接口节点
1 &usbh_ehci {
2 phys = <&usbphyc_port0>;
3 status = "okay";
4 };
5
6 &usbotg_hs {
7 phys = <&usbphyc_port1 0>;
8 phy-names = "usb2-phy";
9 usb-role-switch;
10 status = "okay";
11
12 port {
13 usbotg_hs_ep: endpoint {
14 remote-endpoint = <&con_usbotg_hs_ep>;
15 };
16 };
17 };
18
19 &usbphyc {
20 status = "okay";
21 };
上述代码中有三个节点usbh_ehci、usbotg_hs和usbphyc,其中usbotg_hs默认就有,在前面将其屏蔽掉了,完成以后如下图所示:
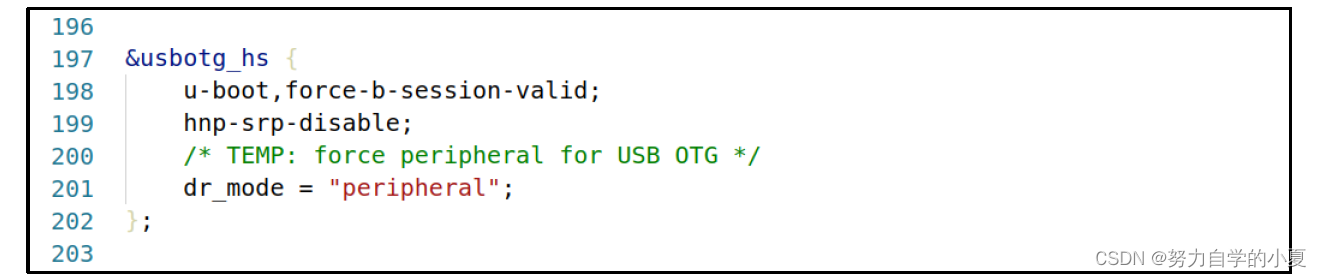
在stm32mp157d-atk-u-boot.dtsi文件中添加usbotg_hs节点
最后,需要在stm32mp157d-atk-u-boot.dtsi文件里面添加usbotg_hs节点,节点内容如下所示:
示例代码13.2.7.4 usbotg_hs节点
1 &usbotg_hs {
2 u-boot,force-b-session-valid;
3 hnp-srp-disable;
4 /* TEMP: force peripheral for USB OTG */
5 dr_mode = "peripheral";
6 };
添加结果如下图所示:
至此,uboot下的 USB OTG就已经修改完成,重新编译 uboot并烧写,然后使用ums命令测试,看看能不能将EMMC模拟成U盘,挂载到电脑上。把STM32MP157开发板的USB_OTG接口连接到电脑里,重启开发板,接着运行以下命令:
| ums 0 mmc 1 |
如果电脑上出现U盘字样的磁盘,那么USB OTG工作成功。
使能boot和bootd命令
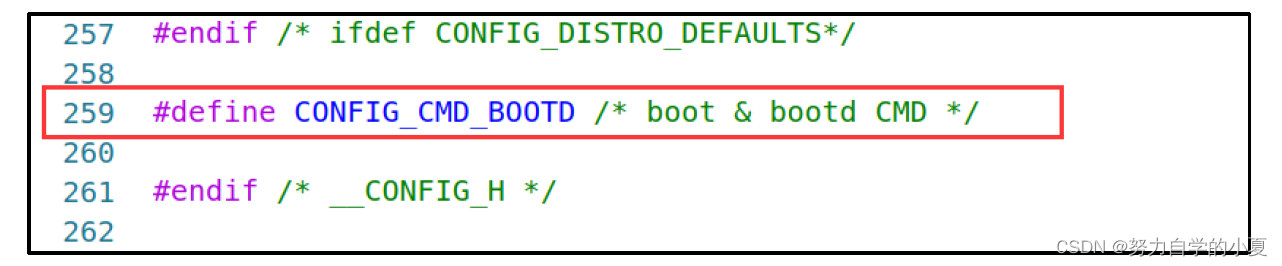
ST官方uboot默认并没有使能boot和bootd这两个命令,这两个命令的实现源文件为cmd/bootm.c bootm.c下有如下图所示内容:
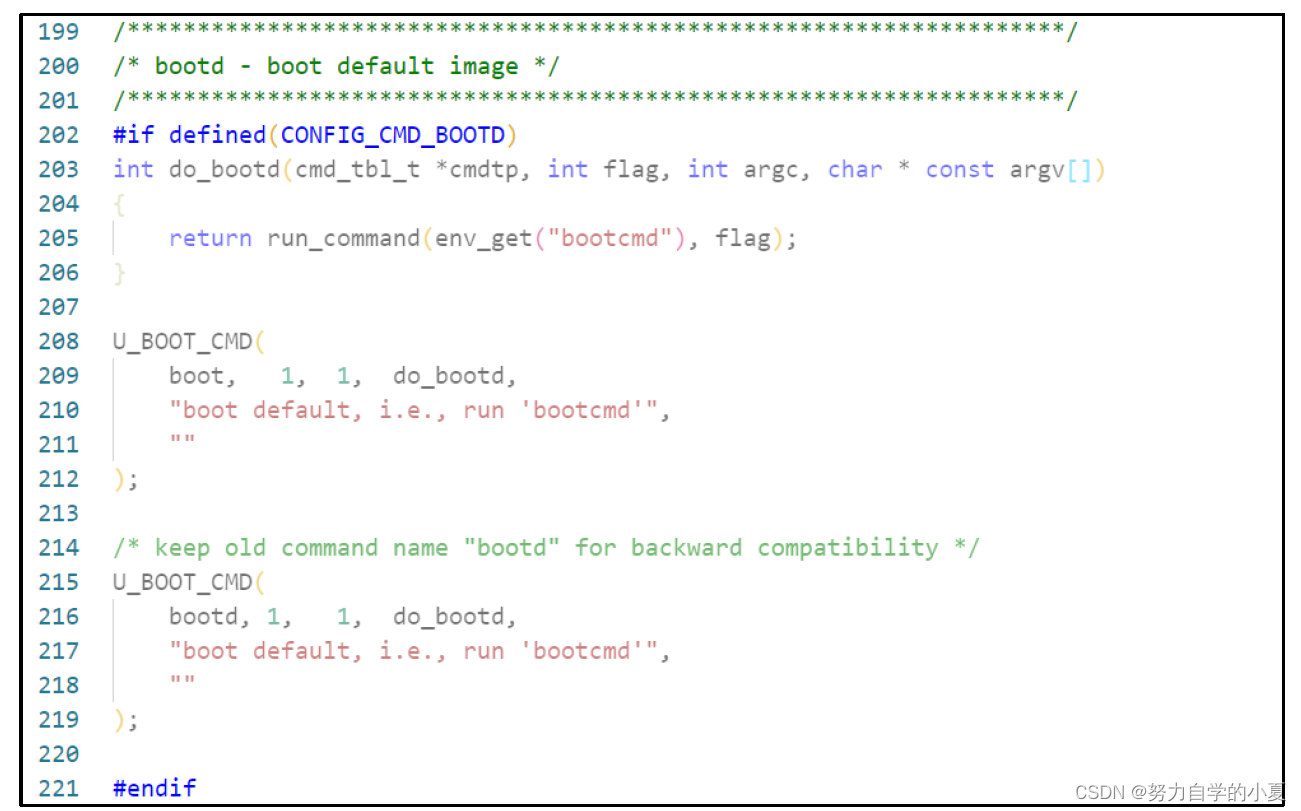
从上图可以看出,如果要使能boot和bootd这两个命令 ,必须定义宏CONFIG_CMD_BOOT。打开 include/configs/stm32mp1.h,然后在后面添加如下宏定义:
| #define CONFIG_CMD_BOOTD /* 使能boot和bootd命令 */ |
添加后如下图所示:
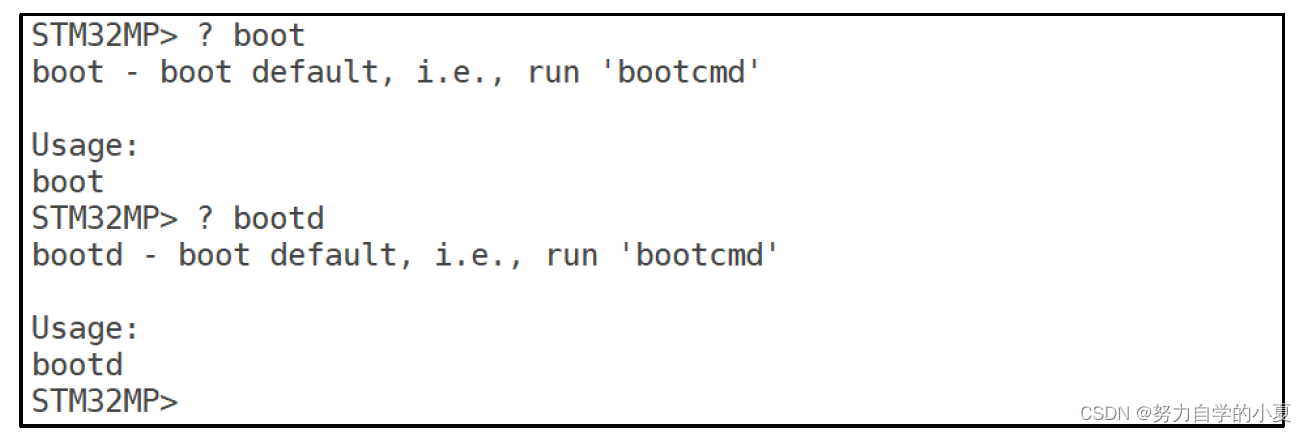
重新编译uboot并烧写启动,输入命令:
| ?boot |
或是
| ?bootz |
如果boot和bootd使能的话就会打印出相应的命令使用方法,如下图所示:
LCD驱动修改
uboot也是支持LCD显示的,但是要进行相应的设置,主要是设置屏幕背光、屏幕时序参数这些,这些直接在设备树里面修改即可。打开stm32mp157d-atk.dts文件,在里面添加LCD相
关节点信息,首先在根节点“/”下添加panel_backlight和panel_rgb这两个节点,节点内容如下:
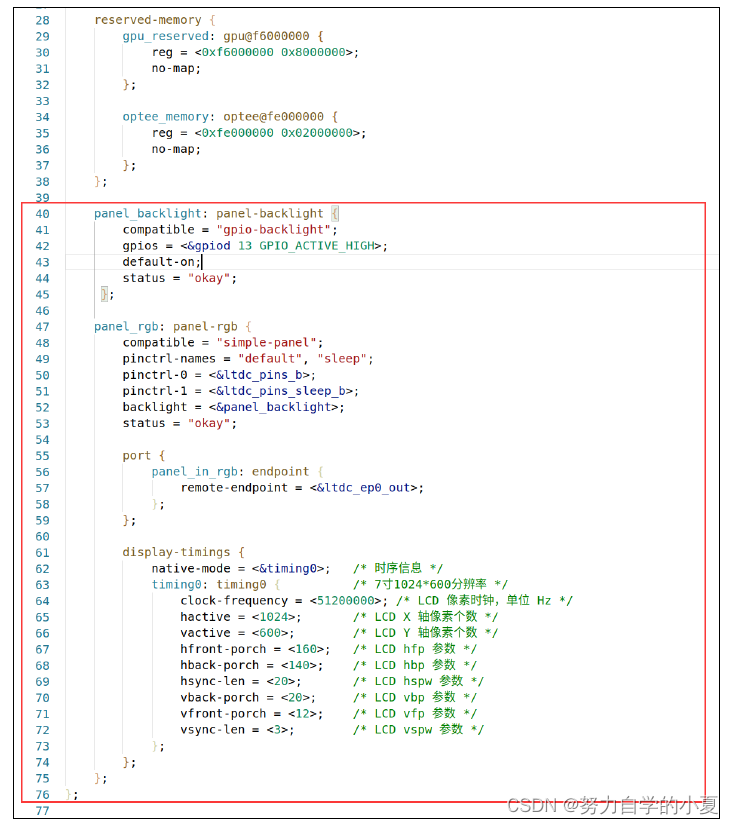
示例代码13.2.9.1 新添加节点信息
1 panel_backlight: panel-backlight {
2 compatible = "gpio-backlight";
3 gpios = <&gpiod 13 GPIO_ACTIVE_HIGH>;
4 default-on;
5 status = "okay";
6 };
7
8 panel_rgb: panel-rgb {
9 compatible = "simple-panel";
10 pinctrl-names = "default", "sleep";
11 pinctrl-0 = <<dc_pins_b>;
12 pinctrl-1 = <<dc_pins_sleep_b>;
13 backlight = <&panel_backlight>;
14 status = "okay";
15
16 port {
17 panel_in_rgb: endpoint {
18 remote-endpoint = <<dc_ep0_out>;
19 };
20 };
21
22 display-timings {
23 native-mode = <&timing0>; /* 时序信息 */
24 timing0: timing0 { /* 7寸1024*600分辨率 */
25 clock-frequency = <51200000>; /* LCD 像素时钟,单位 Hz */
26 hactive = <1024>; /* LCD X 轴像素个数 */
27 vactive = <600>; /* LCD Y 轴像素个数 */
28 hfront-porch = <160>; /* LCD hfp 参数 */
29 hback-porch = <140>; /* LCD hbp 参数 */
30 hsync-len = <20>; /* LCD hspw 参数 */
31 vback-porch = <20>; /* LCD vbp 参数 */
32 vfront-porch = <12>; /* LCD vfp 参数 */
33 vsync-len = <3>; /* LCD vspw 参数 */
34 };
35 };
36 };
第1-6行,panel_backlight为LCD的背光控制节点,主要指定LCD背光IO所使用的引脚,正点原子的STM32MP157开发板LCD背光引脚为PD13。
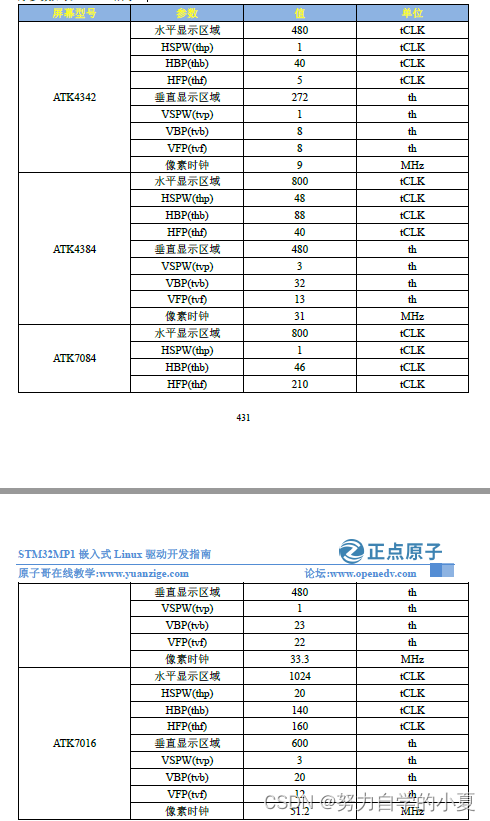
第8-38行,panel_rgb为RGB LCD节点,指定了LTDC接口所使用的IO、屏幕时序参数等。第11-12行指定LTDC接口的IO,ltdc_pins_b和ltdc_pins_sleep_b定义在stm32mp15-pinctrl.dtsi文件中。第22-35行的display-timings是非常重要的LCD时序参数,不同的屏幕其时序参数不同,这里演示的是正点原子7寸1024*600分辨率的。这款屏幕时序参数如下图所示:
添加完成后如下图所示:
最后还需要在stm32mp157d-atk.dts文件里面向ltdc节点追加一些内容,内容如下:
示例代码13.2.9.3 ltdc节点
1 <dc {
2 status = "okay";
3 pinctrl-names = "default";
4 port {
5 #address-cells = <1>;
6 #size-cells = <0>;
7
8 ltdc_ep0_out: endpoint@0 {
9 reg = <0>;
10 remote-endpoint = <&panel_in_rgb>;
11 };
12 };
13 };
添加完成后如下图所示:

修改完成以后编译uboot,得到新的uImage和stm32mp157d-atk.dtb设备树,关于uboot下LCD的测试方法稍后会讲解。
U-boot测试
自烧写测试
之前的TF-A和uboot笔记中说了很多次STM32CubeProgrammer是如何烧写系统的,核心就是先向DDR里面下载一个 uboot镜像,然后启动此uboot,使用uboot里面的相关命令进行烧写。本章前面都是使用正点原子出厂u-boot.stm32来烧写我们移植的uboot,本小节就用我们移植好的 u-boot来烧写自身,也就是自烧写测试。这里就再也不需要my-u-boot.stm32了,直接使用我们前面编译得到的u-boot.stm32替换掉images目录下的正点原子出厂u-boot.stm32。然后修改FlashLayout,如下图所示:

修改完成以后重新烧写测试,此时首先下载到DDR中的u-boot.stm32镜像也是自己编译得到了,也就是用自己编译的uboot来烧写自身。检测方法很简单,就是看能不能正常烧写。
从EMMC启动Linux
从EMMC启动也就是将编译出来的Linux镜像文件uImage和.dtb设备树文件保存在EMMC中,uboot从EMMC中读取这两个文件并启动,这个是产品最终的启动方式。首先EMMC里面要先存放Linux镜像文件uImage和.dtb设备树,但是我们前面新建的FlashLayout文件并没有烧写uImage和.dtb,所以需要修改一下FlashLayout文件,加入uImage和.dtb烧写命令。由于还没有移植Linux系统,所以uImage和.dtb就先使用正点原子出厂系统提供的, 就是atk-image-bootfs.ext4。 atk-image-bootfs.ext4是ext4格式的打包文件,因为STM32CubeProgrammer软件要求将uImage和.dtb打包在一起,格式为ext4。atk-image-bootfs.ext4里面的文件如下图所示:
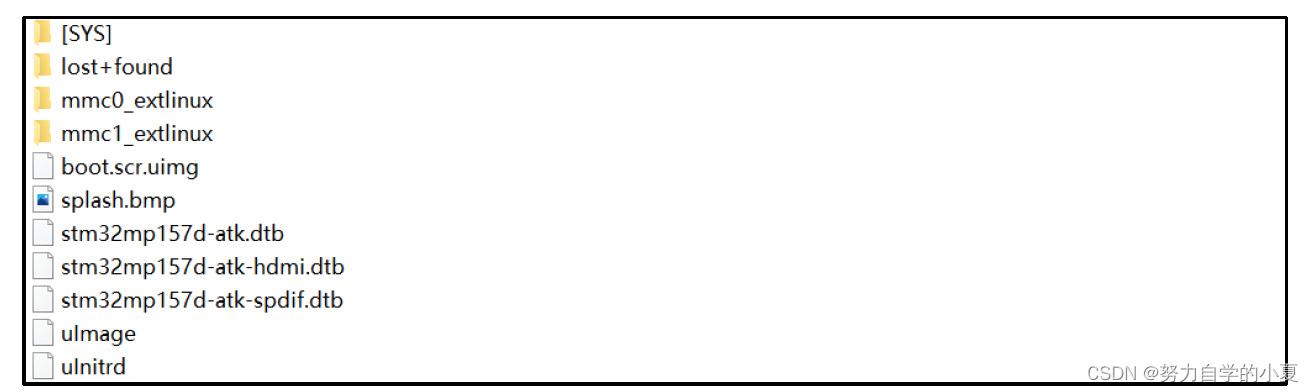
从上图可以看出,正点原子出厂的atk-image-bootfs.ext4里面还是有不少文件,其中最重要的就是uImage和.dtb设备树。后面讲解Linux系统移植的时候会讲解如何将uImage和.dtb打包成ext4格式。
复制一份atk-image-bootfs.ext4到images文件夹,然后打开FlashLayout文件(tf-a.tsv),添加下面一行:
P 0x21 boot System mmc1 0x00280000 atk-image-bootfs.ext4
修改完成以后如下图所示:

修改完成以后烧写到开发板中并重启,首先使用ext4ls命令查看一下EMMC的分区2里面有没有uImage和.dtb文件,命令如下:
| ext4ls mmc 1:2 |
结果如下图所示:
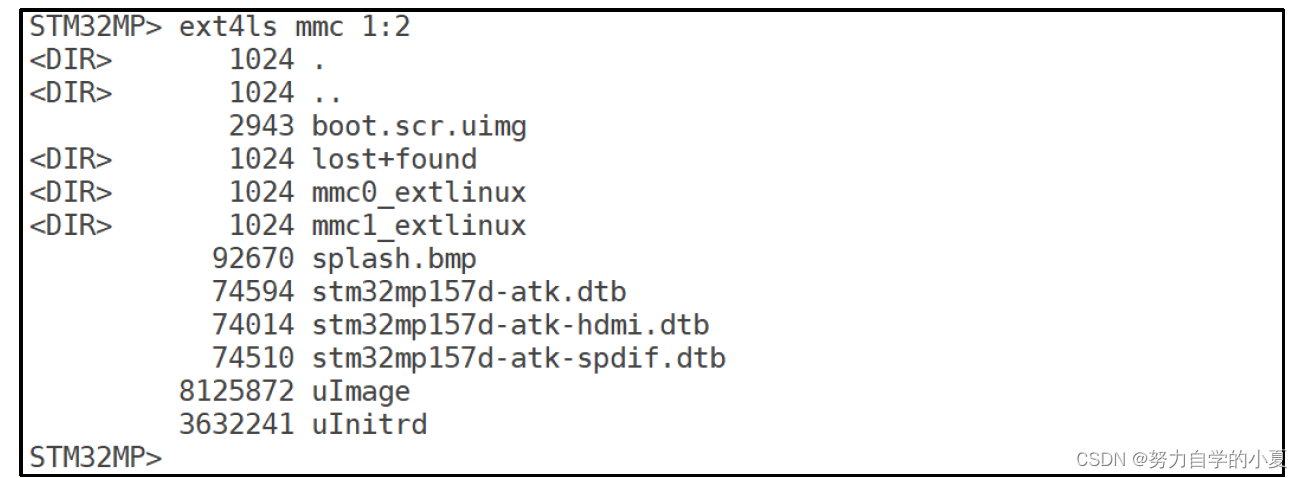
这里只需要用到上图中的uImage和stm32mp157d-atk.dtb这两个文件,设置bootcmd环境变量从EMMC里面读取系统文件,然后再启动,这个在前面讲解BOOT命令的时候已经讲过了如何操作, 命令如下:
| setenv bootcmd 'ext4load mmc 1:2 c2000000 uImage;ext4load mmc 1:2 c4000000 stm32mp157d-atk.dtb;bootm c2000000 - c4000000' saveenv boot |
设置好以后uboot就会按照bootcmd环境变量的内容加载系统并启动,如下图所示:
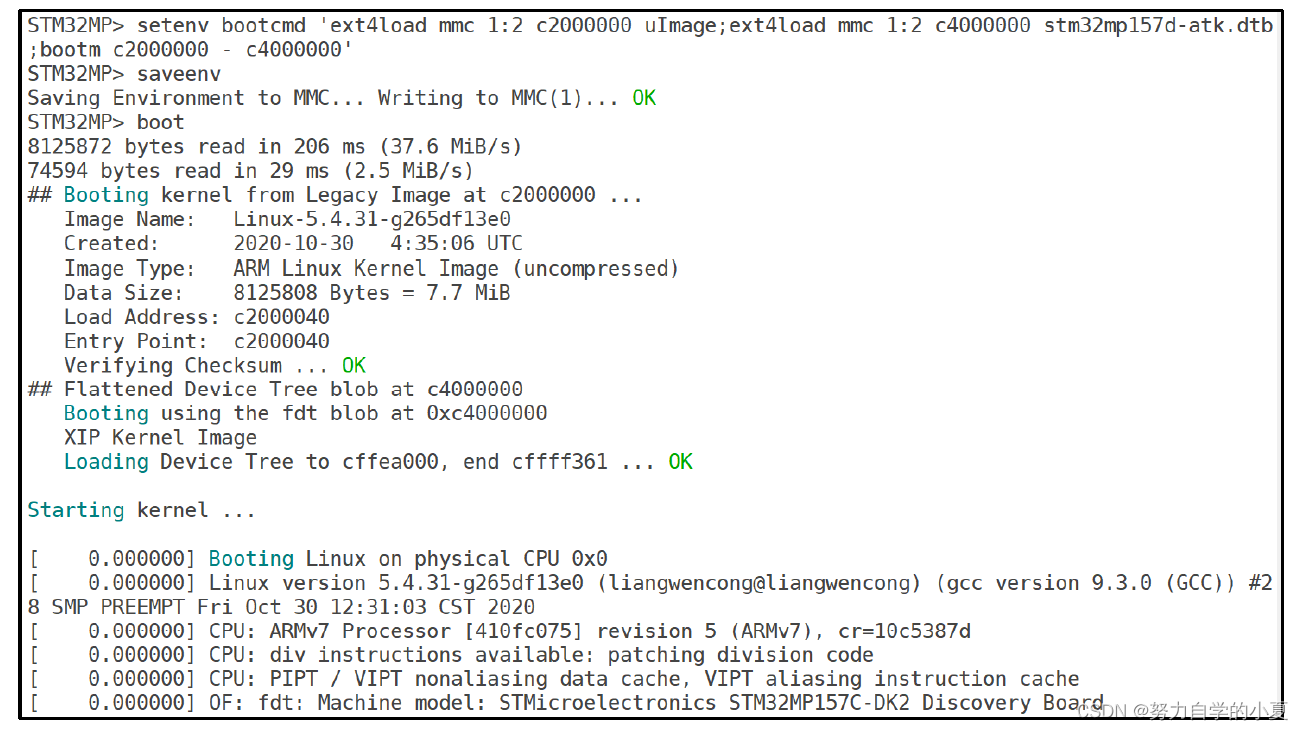
注意!只要出现上图中的“Booting Linux on physical CPU 0x0”这一行就说明uboot引导Linux内核成功!
从网络启动Linux系统
从网络启动Linux系统的唯一目的就是为了调试!不管是为了调试Linux系统还是Linux下的驱动。每次修改Linux系统文件或者Linux下的某个驱动以后都要将其烧写到EMMC中去测试,这样太麻烦了。可以设置Linux从网络启动,也就是将Linux镜像文件和根文件系统都放到Ubuntu下某个指定的文件夹中,这样每次重新编译Linux内核或者某Linux驱动以后只需要使用cp命令将其拷贝到这个指定的文件夹中即可,就不用需要频繁的烧写EMMC,加快了开发速度。可以通过nfs或者tftp从Ubuntu中下载uImage和设备树文件,根文件系统的话也可以通过nfs挂载,不过本小节不讲解如何通过nfs挂载根文件系统,这方面内容会在讲解根文件系统移植的时候再讲解。这里使用tftp从Ubuntu中下载uImage和设备树文件,前提是要将uImage和设备树文件放到Ubuntu下的tftp目录中。
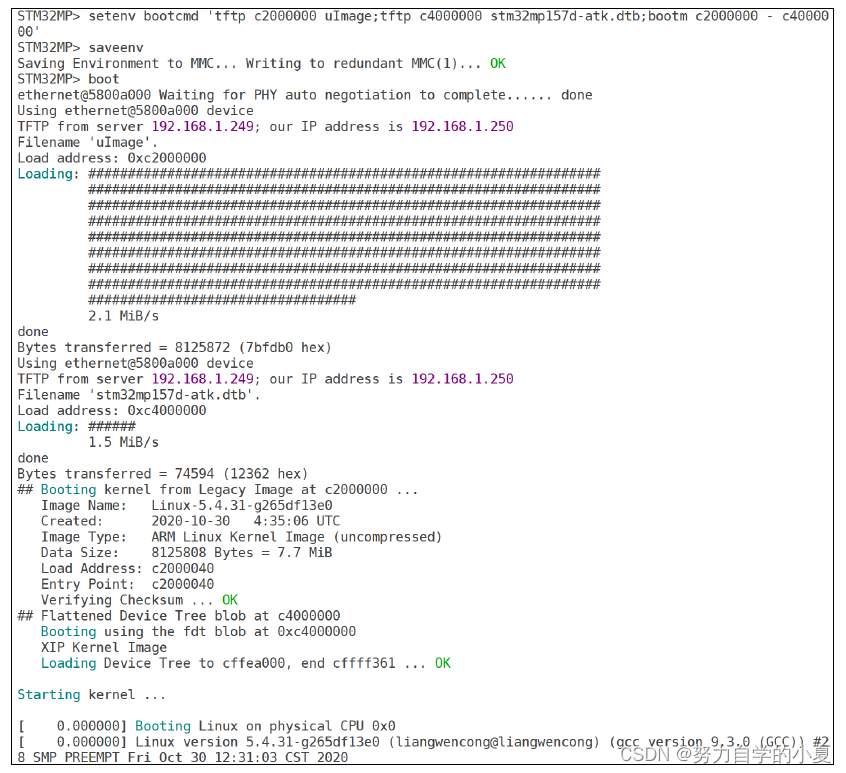
设置bootcmd环境变量,设置如下:
| setenv bootcmd 'tftp c2000000 uImage;tftp c4000000 stm32mp157d-atk.dtb;bootm c2000000 - (有空格 ) c4000000' saveenv boot |
设置好以后,uboot先从tftp服务器下载uImage和stm32mp157d-atk.dtb这两个文件,然后启动,如下图所示:
LCD测试
烧写过程显示测试
uboot下LCD测试有两种方法,第一种就是用STM32CubeProgrammer烧写系统的时候会在LCD上显示烧写过程,如下图所示:
bmp命令显示测试
第二种就是可以使用uboot下的bmp命令在LCD上显示一张bmp图片,bmp命令如下图所示:

从上图中可以看出,有bmp info和bmp display两个命令:
- bmp info命令
命令格式如下:
| bmp info <imageAddr> |
- bmp display命令
| bmp display <imageAddr> [x, y] |
bmp display命令用于显示bmp图片,imageAddr是要显示的BMP图片在RAM中的起始地址,[x,y]用于指定BMP图片左上角在屏幕上的显示坐标。
可以准备一个BMP格式的图片,符合如下要求:
- 图片的分辨率不能超过当前所使用的LCD分辨率。
- 图片的色深应该和LCD驱动格式一致,比如STM32MP1的uboot中LCD驱动默认为16BPP色彩的RGB565格式,因此BMP图片也必须是16位的RGB565格式。一般图片都是32位色深度,需要进行转换。
16位RGB565格式的BMP图片准备好以后就可以显示了,首先将要显示的BMP图片放到ubuntu的TFTP服务器目录下,通过网络将BMP图片下载到板子的DDR中,然后再用bmp命令显示。命令如下:
| tftp c0000000 test.bmp //下载bmp图片 bmp info c0000000 //显示图片信息 |
图片信息如下:

从上图可以看出,当前BMP图片分辨率为1024600,每个像素16位,也就是16BPP,当前LCD分辨率为1024600,输入如下命令在LCD上显示图片:
| bmp display c0000000 0 0 //显示bmp图片 |
结果如下图所示:

bootcmd和bootargs环境变量
bootcmd环境变量
bootcmd在前面已经说了很多次了,bootcmd保存着uboot默认命令,uboot倒计时结束以后就会执行bootcmd中的命令。这些命令一般都是用来启动Linux内核的,比如读取EMMC或者NAND Flash中的Linux内核镜像文件和设备树文件到DRAM中,然后启动Linux内核。可以在uboot启动以后进入命令行设置bootcmd环境变量的值。如果EMMC或者NAND中没有保存bootcmd的值,那么uboot就会使用默认的值,板子第一次运行uboot的时候都会使用默认值来设置bootcmd环境变量。打开文件include/env_default.h,在此文件中有如下所示内容:
示例代码13.4.1.1 默认环境变量
13 env_t embedded_environment __UBOOT_ENV_SECTION__(environment) = {
14 ENV_CRC, /* CRC Sum */
15 #ifdef CONFIG_SYS_REDUNDAND_ENVIRONMENT
16 1, /* Flags: valid */
17 #endif
18 {
19 #elif defined(DEFAULT_ENV_INSTANCE_STATIC)
20 static char default_environment[] = {
21 #else
22 const uchar default_environment[] = {
23 #endif
24 #ifndef CONFIG_USE_DEFAULT_ENV_FILE
25 #ifdef CONFIG_ENV_CALLBACK_LIST_DEFAULT
26 ENV_CALLBACK_VAR "=" CONFIG_ENV_CALLBACK_LIST_DEFAULT "\0"
27 #endif
28 #ifdef CONFIG_ENV_FLAGS_LIST_DEFAULT
29 ENV_FLAGS_VAR "=" CONFIG_ENV_FLAGS_LIST_DEFAULT "\0"
30 #endif
31 #ifdef CONFIG_USE_BOOTARGS
32 "bootargs=" CONFIG_BOOTARGS "\0"
33 #endif
34 #ifdef CONFIG_BOOTCOMMAND
35 "bootcmd=" CONFIG_BOOTCOMMAND "\0"
36 #endif
37 #ifdef CONFIG_RAMBOOTCOMMAND
38 "ramboot=" CONFIG_RAMBOOTCOMMAND "\0"
39 #endif
40 #ifdef CONFIG_NFSBOOTCOMMAND
41 "nfsboot=" CONFIG_NFSBOOTCOMMAND "\0"
42 #endif
43 #if defined(CONFIG_BOOTDELAY)
44 "bootdelay=" __stringify(CONFIG_BOOTDELAY) "\0"
45 #endif
46 #if defined(CONFIG_BAUDRATE) && (CONFIG_BAUDRATE >= 0)
47 "baudrate=" __stringify(CONFIG_BAUDRATE) "\0"
48 #endif
49 #ifdef CONFIG_LOADS_ECHO
50 "loads_echo=" __stringify(CONFIG_LOADS_ECHO) "\0"
51 #endif
52 #ifdef CONFIG_ETHPRIME
53 "ethprime=" CONFIG_ETHPRIME "\0"
54 #endif
55 #ifdef CONFIG_IPADDR
56 "ipaddr=" __stringify(CONFIG_IPADDR) "\0"
57 #endif
58 #ifdef CONFIG_SERVERIP
59 "serverip=" __stringify(CONFIG_SERVERIP) "\0"
60 #endif
61 #ifdef CONFIG_SYS_AUTOLOAD
62 "autoload=" CONFIG_SYS_AUTOLOAD "\0"
63 #endif
64 #ifdef CONFIG_PREBOOT
65 "preboot=" CONFIG_PREBOOT "\0"
66 #endif
67 #ifdef CONFIG_ROOTPATH
68 "rootpath=" CONFIG_ROOTPATH "\0"
69 #endif
70 #ifdef CONFIG_GATEWAYIP
71 "gatewayip=" __stringify(CONFIG_GATEWAYIP) "\0"
72 #endif
73 #ifdef CONFIG_NETMASK
74 "netmask=" __stringify(CONFIG_NETMASK) "\0"
75 #endif
76 #ifdef CONFIG_HOSTNAME
77 "hostname=" CONFIG_HOSTNAME "\0"
78 #endif
79 #ifdef CONFIG_BOOTFILE
80 "bootfile=" CONFIG_BOOTFILE "\0"
81 #endif
82 #ifdef CONFIG_LOADADDR
83 "loadaddr=" __stringify(CONFIG_LOADADDR) "\0"
84 #endif
85 #ifdef CONFIG_CLOCKS_IN_MHZ
86 "clocks_in_mhz=1\0"
87 #endif
88 #if defined(CONFIG_PCI_BOOTDELAY) && (CONFIG_PCI_BOOTDELAY > 0)
89 "pcidelay=" __stringify(CONFIG_PCI_BOOTDELAY)"\0"
90 #endif
91 #ifdef CONFIG_ENV_VARS_UBOOT_CONFIG
92 "arch=" CONFIG_SYS_ARCH "\0"
93 #ifdef CONFIG_SYS_CPU
94 "cpu=" CONFIG_SYS_CPU "\0"
95 #endif
96 #ifdef CONFIG_SYS_BOARD
97 "board=" CONFIG_SYS_BOARD "\0"
98 "board_name=" CONFIG_SYS_BOARD "\0"
99 #endif
100 #ifdef CONFIG_SYS_VENDOR
101 "vendor=" CONFIG_SYS_VENDOR "\0"
102 #endif
103 #ifdef CONFIG_SYS_SOC
104 "soc=" CONFIG_SYS_SOC "\0"
105 #endif
106 #endif
107 #if defined(CONFIG_BOOTCOUNT_BOOTLIMIT) && (CONFIG_BOOTCOUNT_BOOTLIMIT > 0)
108 "bootlimit=" __stringify(CONFIG_BOOTCOUNT_BOOTLIMIT)"\0"
109 #endif
110 #ifdef CONFIG_EXTRA_ENV_SETTINGS
111 CONFIG_EXTRA_ENV_SETTINGS
112 #endif
113 "\0"
114 #else /* CONFIG_USE_DEFAULT_ENV_FILE */
115 #include "generated/defaultenv_autogenerated.h"
116 #endif
117 #ifdef DEFAULT_ENV_INSTANCE_EMBEDDED
118 }
119 #endif
120 };
从示例代码13.3.4.1的第13行可以看出,embedded_environment是个env_t类型的变量,保存在environment 段里面,env_t类型如下:
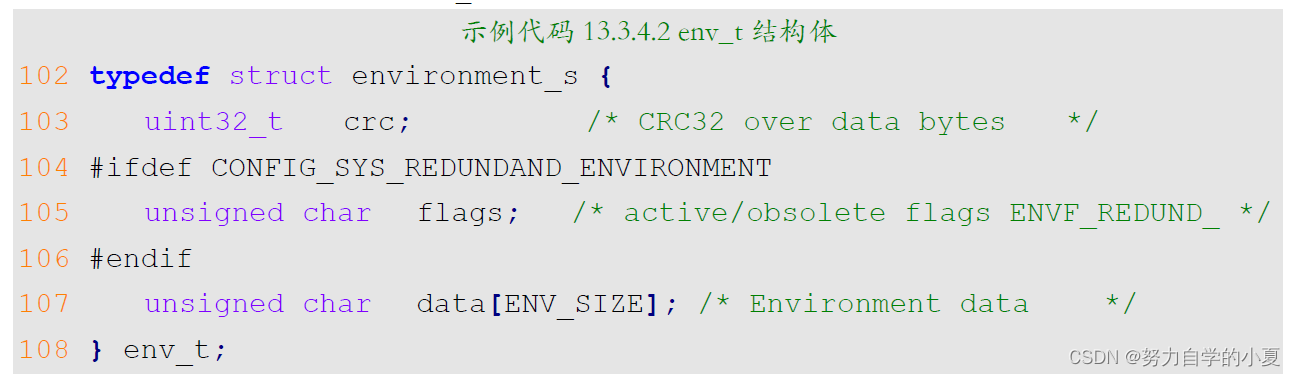
env_t结构体中的crc为CRC值,flags是标志位,data数组就是环境变量值。 示例代码13.3.4.1中指定了很多环境变量的默认值,比如bootcmd的默认值就是CONFIG_BOOTCOMMAND,bootargs的默认值就是CONFIG_BOOTARGS。可以直接在stm32mp1.h文件中通过设置宏CONFIG_BOOTCOMMAND来设置bootcmd的默认值。
bootargs环境变量
bootargs保存着uboot传递给Linux内核的参数,比如指定Linux内核所使用的console、指定根文件系统所在的分区等,如以下bootargs环境变量值:
| console=ttySTM0,115200 root=/dev/mmcblk2p3 rootwait rw |
console
console用来设置linux终端(或者叫控制台),也就是通过什么设备来和Linux进行交互,是串口还是LCD屏幕?如果是串口的话应该是串口几等等。一般设置串口作为Linux终端,这样就可以在电脑上通过MobaXterm来和linux交互了。这里设置console为ttySTM0,因为linux启动以后STM32MP1的串口4在linux下的设备文件就是/dev/ttySTM0。
ttySTM0后面有个“,115200”,这是设置串口的波特率,console=ttySTM0,115200综合起来就是设置ttySTM0(就是串口4)作为Linux终端,并且串口波特率设置为115200。
root
root用来设置根文件系统的位置,root=/dev/mmcblk2p3用于知名根文件系统存放在mmcblk2设备的分区3中。正点原子的STM32MP1核心板启动 linux以后会存在/dev/mmcblk1、/dev/mmcblk2、/dev/mmcblk1p1、/dev/mmcblk1p2、/dev/mmcblk2p1、/dev/mmcblk2p2和/dev/mmcblk2p3这样的文件,其中/dev/mmcblkx(x=0~n)表示mmc设备,而/dev/mmcblkxpy(x=0-n,y=1-n)表示mmc设备x的分区y。在STM32MP1开发板中/dev/mmcblk2表示EMMC,而/dev/mmcblk2p3表示EMMC的分区3。
root后面有“rootwait rw”,rootwait表示等待mmc设备初始化完成以后再挂载,否则的话mmc设备还没初始化完成就挂载根文件系统会出错的。rw表示根文件系统是可以读写的,不加rw的话可能无法在根文件系统中进行写操作,只能进行读操作。
rootfstype
此选项一般配合root一起使用,rootfstype用于指定根文件系统类型,如果根文件系统为ext格式的话此选项无所谓。如果根文件系统是yaffs、jffs或ubifs的话就需要设置此选项,指定根文件系统的类型。
bootargs常设置的选项就这三个,后面遇到其 他选项的话再讲解。
总结
uboot移植流程
首先要先创建自己使用开发板的默认配置文件,这个需要在第一次编译uboot的时候先执行:
| make stm32mp15_trusted_defconfig |
这个文件可以直接参考官方的STM32MP157 EVK开发板,如下命令:
| cd configs //进入uboot的configs目录 cp stm32mp15_trusted_defconfig stm32mp15_atk_trusted_defconfig //拷贝 |
然后需要创建设备树,可以直接复制ST官方EVK开发板内容:
| cd arch/arm/dts/ //进入uboot设备树目录 cp stm32mp157d-ed1.dts stm32mp157d-atk.dts //复制.dts cp stm32mp15xx-edx.dtsi stm32mp157d-atk.dtsi //复制.dtsi cp stm32mp157a-ed1-u-boot.dtsi stm32mp157d-atk-u-boot.dtsi //复制.dtsi |
创建完成后,需要在stm32mp157d-atk.dts中加上对于stm32mp157d-atk.dtsi的引用;之后需要完成如下修改:
- 修改电源管理设置(这一部分需要删去两个IO定义,led以及pmic定义;之后删除adc、dac以及i2c4节点;再删除led和sd_switch节点;添加正点原子开发板的电源管理配置)
- 修改TF卡和EMMC配置(修改sdmmc1和sdmmc2)
- 修改网络驱动(修改网络设备树,添加ethernet0节点;修改网络驱动,针对的是PHY芯片)
- 修改USB OTG设备树(添加usb_phy_tuning节点;添加STUSB1600 I2C节点;最后添加usb接口的相关节点)
- 使能boot和bootd命令(在include/configs/stm32mp1.h中定义宏CONFIG_CMD_BOOTD)
- 有LCD,则需要添加LCD驱动(添加panel_backlight和panel_rgb节点;追加ltdc节点内容)
总结之总结
这一篇笔记就是针对STM32MP157开发板完成uboot的移植,从ST官方的源代码出发,经过对于正点原子开发板的适配,修改设备树内容完成uboot移植。