camera整体框架
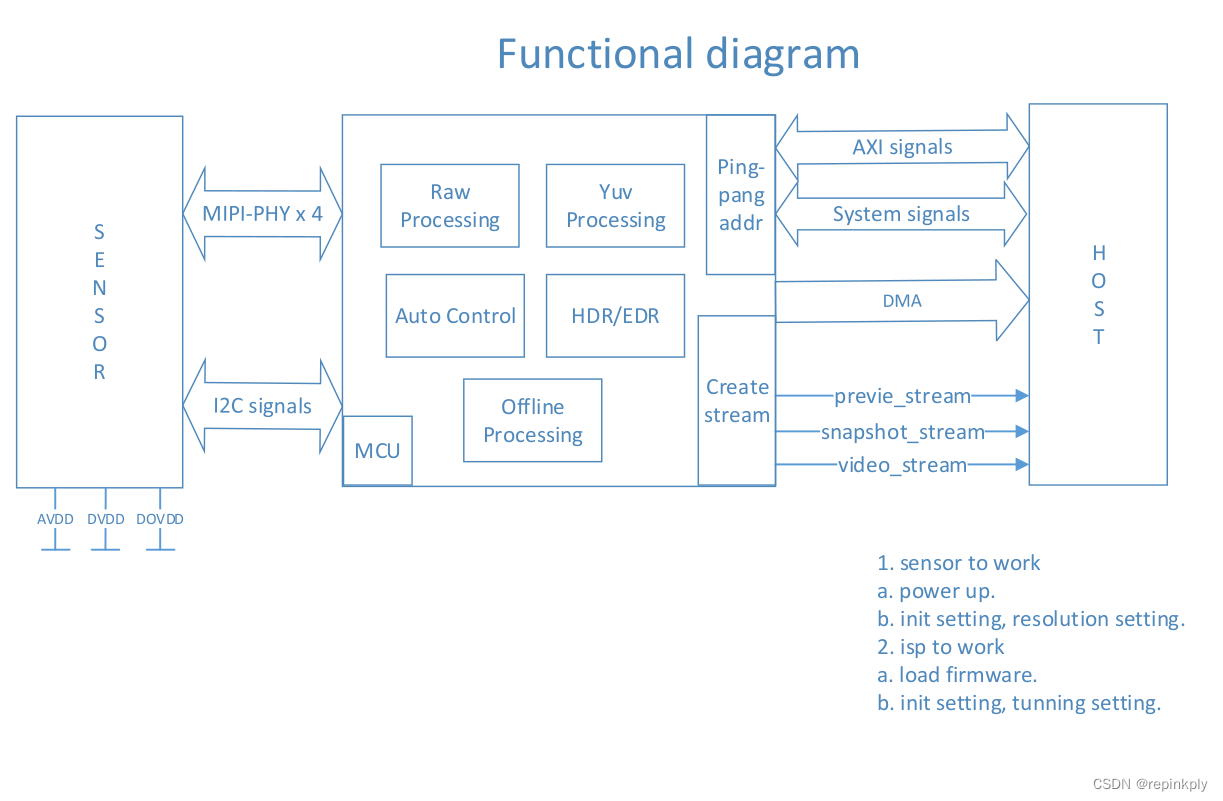
- sensor 上电,通过 MIPI协议传输,得到RAW图像数据。
- RAW图像数据经过ISP处理,得到YUV图像数据。
- YUV图像数据再经过DMA传输到DDR内存中,DDR内存也就是上图中标识的HOST。
- 每个厂家的 ISP原理和功能大致相同,像Auto Control(AEC、AF、AWB)都是在ISP里面做的,ISP里面还有 Raw Processing、Yuv Processing、Rgb Processing、Offline Processing(一般是去噪功能)。
- 每一个ISP里面都有一个MCU,MCU可以理解为一个处理器。ISP中的MCU需要上电工作,首先需要 load firmware。
- sensor只会出一路数据,但是经过 ISP之后,同时会存在至少三路数据 preview_stream 、snapshot_stream、video_stream。怎么样从sensor的一路数据变成 至少三路数据呢?这个就是 ISP内部做的事情,ISP内部可以将 sneosr出的一路数据拷贝分发成至少三路数据。
- 上图主要有三个部分组成:sensor、ISP、DDR。
ISP Pipeline diagram
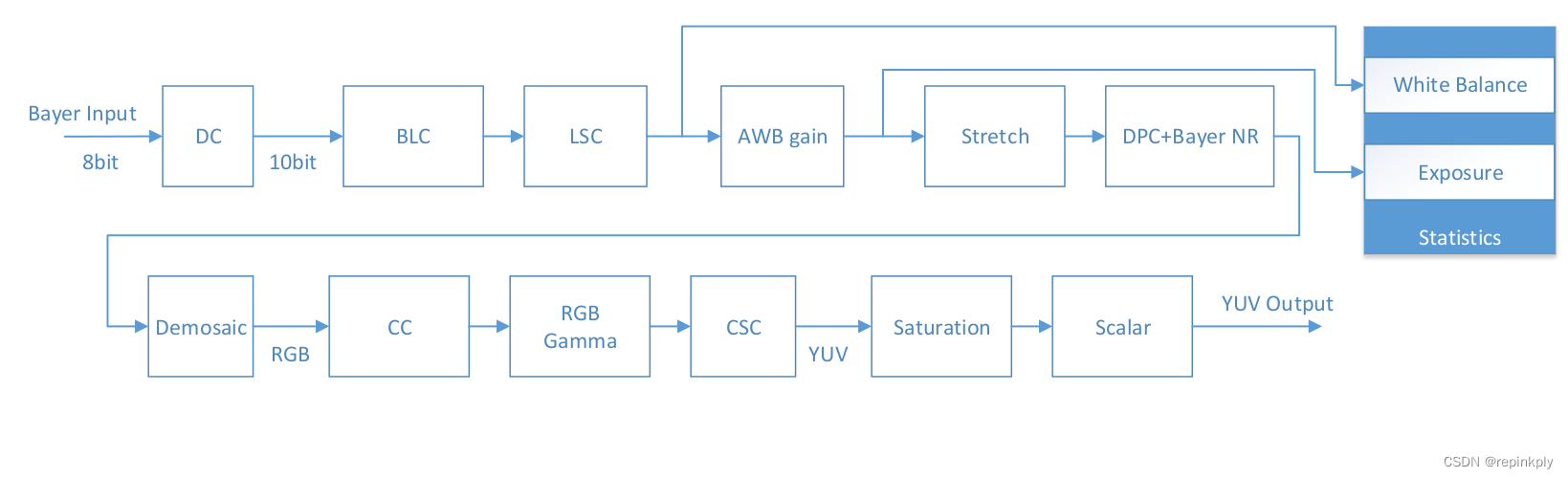
- 以上流程图为 ISP工作处理流程图,每个厂商工作原理都差不多。
- 如果输入数据为 8bit,为了提高精度,会做一个 DC(data convert) 将8位数据转化为10位数据。
- 对于软件流程来说,我们最关心的是在什么阶段,图像数据是什么格式的?在DC之前,是Raw数据,在Demosaic之后是RGB数据,在CSC之后是YUV数据。在Linux/Andriod系统中 YUV数据是可以直接显示的,所以我们最关心的是 YUV数据。
- 在ISP里面,图像数据的转化为:RAW数据 --> RGB数据 --> YUV数据。
Simple Model
• only have mainly function nodes.
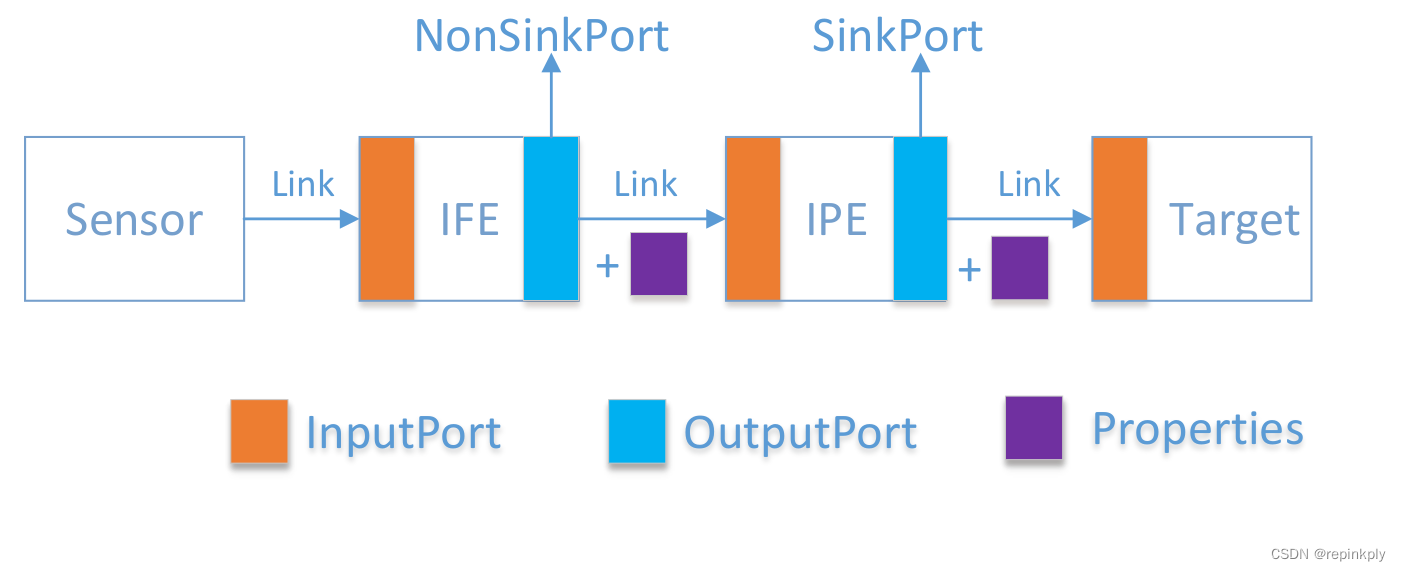
- 来具体看一个最简单的camera模型。sensor -> IIFE -> IPE -> Target(输出)。
- sensor处理的是 RAW图像数据,作为HAL层,不能直接处理RAW图像数据,所以必须要经过IFE的处理,将RAW数据转化为YUV的数据。
- 经过IFE处理之后,又会经过一个IPE的模块,IPE的功能主要是 :做去噪 + SAT图像裁切。
- Target可以理解为:上层 ,FrameWork层想要的数据。比如:预览模式,Target就需要预览数据,拍照模式,Target就需要拍照数据,录像模式,Target就需要录像数据。
- IFE、IPE 这些模块都是称为一个 node,每个node都有很多输入 port,也有很多输出 port。如果一个node的输出 port 连接到 Target,那么这个 port 就可以称为 SinkPort。如果一个 Node的输出 port连接到不是 Target,那么这个 输出 port 就称为 NorSinkPort。
- NorSinkPort 需要的 buffer 是我们自己申请的,SinkPort 需要的buffer 是 app层给的。
Camx and chi_cdk 整体框架
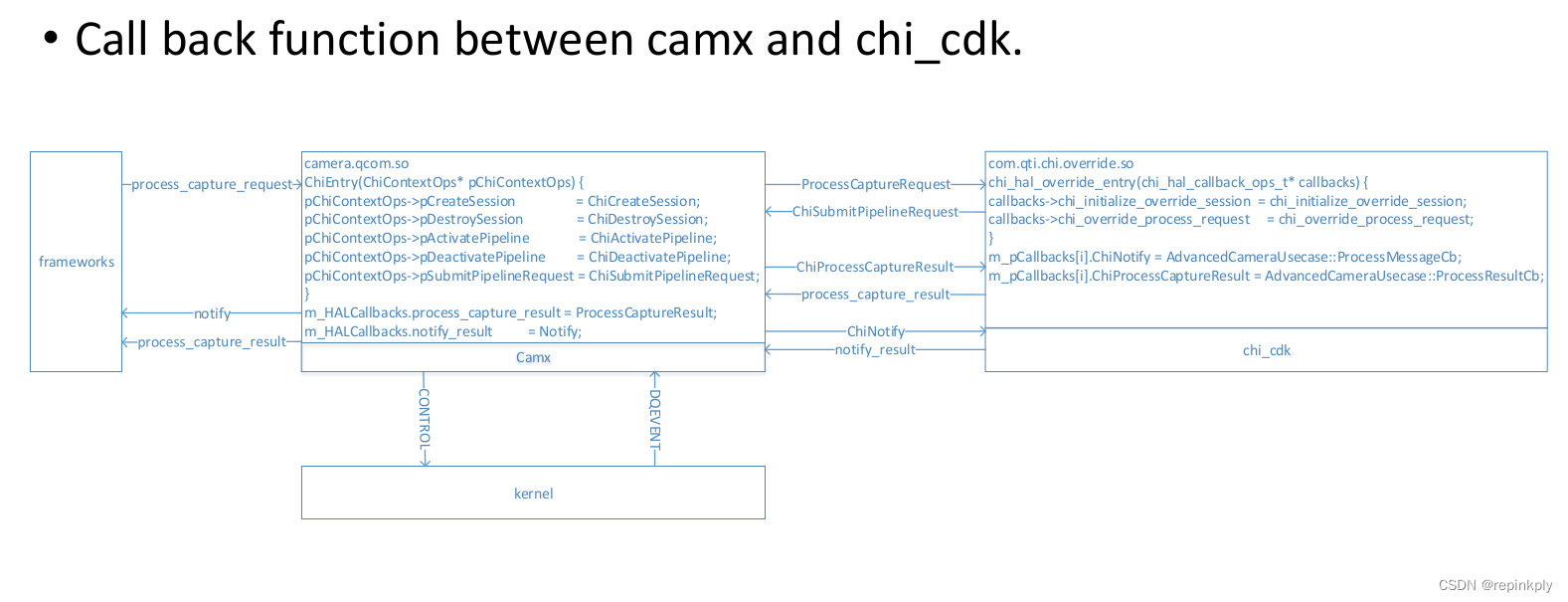
- chi-cdk是客户自定义的所需要的功能。camx是高通的底层框架,一般手机厂商不会修改。如果用户需要新增功能,在chi-cdk中新增即可。
- camx模块是一个 camera.qcom.so,chi-cdk模块也是一个 com.qti.chi.override.so。这两个so之间可以互相提供多个回调函数,通过 dlopen 进行相互调用。
- frameworks 和 HAL层怎么通信的?framework给HAL下发一个 request,HAL需要回一个 notify(shutter),3个result,其中2个 result 是 metadata,一个 result 是 imagebuffer。
- framework下发一个 request -> camx -> chi-cdk -> camx -> kernel -> camx -> chi-cdk -> camx -> framework
CtsVerifier, Camra Formats
//未完待续....