ROS小乌龟跟随
5.1 TF坐标变换 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
tf模块:在 ROS 中用于实现不同坐标系之间的点或向量的转换。
在ROS中坐标变换最初对应的是tf,不过在 hydro 版本开始, tf 被弃用,迁移到 tf2,后者更为简洁高效,tf2对应的常用功能包有:
tf2_geometry_msgs:可以将ROS消息转换成tf2消息。
tf2: 封装了坐标变换的常用消息。
tf2_ros:为tf2提供了roscpp和rospy绑定,封装了坐标变换常用的API。
坐标系:ROS 中是通过坐标系统开标定物体的,确切的将是通过右手坐标系来标定的。
1.坐标msg消息
订阅发布模型中数据载体 msg 是一个重要实现,首先需要了解一下,在坐标转换实现中常用的 msg:geometry_msgs/TransformStamped 和 geometry_msgs/PointStamped
前者用于传输坐标系相关位置信息,后者用于传输某个坐标系内坐标点的信息。在坐标变换中,频繁的需要使用到坐标系的相对关系以及坐标点信息。
2.静态坐标变换
所谓静态坐标变换,是指两个坐标系之间的相对位置是固定的。
创建项目功能包依赖于tf2 tf2_ros tf2_geometry_msgs roscpp rospy std_msgs geometry_msgs
注意子级与父级坐标系的关系以及坐标转换函数transform()使用的方法。
3.动态坐标变换
所谓动态坐标变换,是指两个坐标系之间的相对位置是变化的。
启动 turtlesim_node,该节点中窗体有一个世界坐标系(左下角为坐标系原点),乌龟是另一个坐标系,键盘控制乌龟运动,将两个坐标系的相对位置动态发布 。
创建项目功能包依赖于 tf2 tf2_ros tf2_geometry_msgs roscpp rospy std_msgs geometry_msgs turtlesim
订阅 turtle1/pose,可以获取乌龟在世界坐标系的 x坐标、y坐标、偏移量以及线速度和角速度。
ros::Subscriber sub = nh.subscribe<turtlesim::Pose>("/turtle1/pose",1000,callback);
void callback(const turtlesim::Pose::ConstPtr& pose){
geometry_msgs::TransformStamped tfs;
// |----头设置
tfs.header.frame_id = "world";
tfs.header.stamp = ros::Time::now();
// |----坐标系 ID
tfs.child_frame_id = "turtle1";
// |----坐标系相对信息设置
tfs.transform.translation.x = pose->x;
tfs.transform.translation.y = pose->y;
tfs.transform.translation.z = 0.0; // 二维实现,pose 中没有z,z 是 0
}4.多坐标变换
现有坐标系统,父级坐标系统 world,下有两子级系统 son1,son2,son1 相对于 world,以及 son2 相对于 world 的关系是已知的,求 son1原点在 son2中的坐标,又已知在 son1中一点的坐标,要求求出该点在 son2 中的坐标。
创建项目功能包依赖于 tf2 tf2_ros tf2_geometry_msgs roscpp rospy std_msgs geometry_msgs turtlesim
使用静态坐标变换发布son1 son2 分别相对于world的坐标关系
<launch>
<node pkg="tf2_ros" type="static_transform_publisher" name="son1" args="0.2 0.8 0.3 0 0 0 /world /son1" output="screen" />
<node pkg="tf2_ros" type="static_transform_publisher" name="son2" args="0.5 0 0 0 0 0 /world /son2" output="screen" />
</launch>
解析 son1 中的点相对于 son2 的坐标
geometry_msgs::TransformStamped tfs = buffer.lookupTransform("son2","son1",ros::Time(0));
ROS_INFO("Son1 相对于 Son2 的坐标关系:父坐标系ID=%s",tfs.header.frame_id.c_str());
ROS_INFO("Son1 相对于 Son2 的坐标关系:子坐标系ID=%s",tfs.child_frame_id.c_str());
ROS_INFO("Son1 相对于 Son2 的坐标关系:x=%.2f,y=%.2f,z=%.2f",
tfs.transform.translation.x,
tfs.transform.translation.y,
fs.transform.translation.z
);然后解析坐标,求出该点在 son2 中的坐标。
geometry_msgs::PointStamped ps;
ps.header.frame_id = "son1";
ps.header.stamp = ros::Time::now();
ps.point.x = 1.0;
ps.point.y = 2.0;
ps.point.z = 3.0;
geometry_msgs::PointStamped psAtSon2;
psAtSon2 = buffer.transform(ps,"son2");
ROS_INFO("在 Son2 中的坐标:x=%.2f,y=%.2f,z=%.2f",
psAtSon2.point.x,
psAtSon2.point.y,
psAtSon2.point.z
);5.坐标系关系查看
输入下面命令查看是否包含该功能包
rospack find tf2_tools如果没有,请使用如下命令安装:
sudo apt install ros-noetic-tf2-tools
启动坐标系广播程序之后,运行如下命令:
rosrun tf2_tools view_frames.py
当前目录会生成一个 frames.pdf 文件


6.TF坐标变换实操
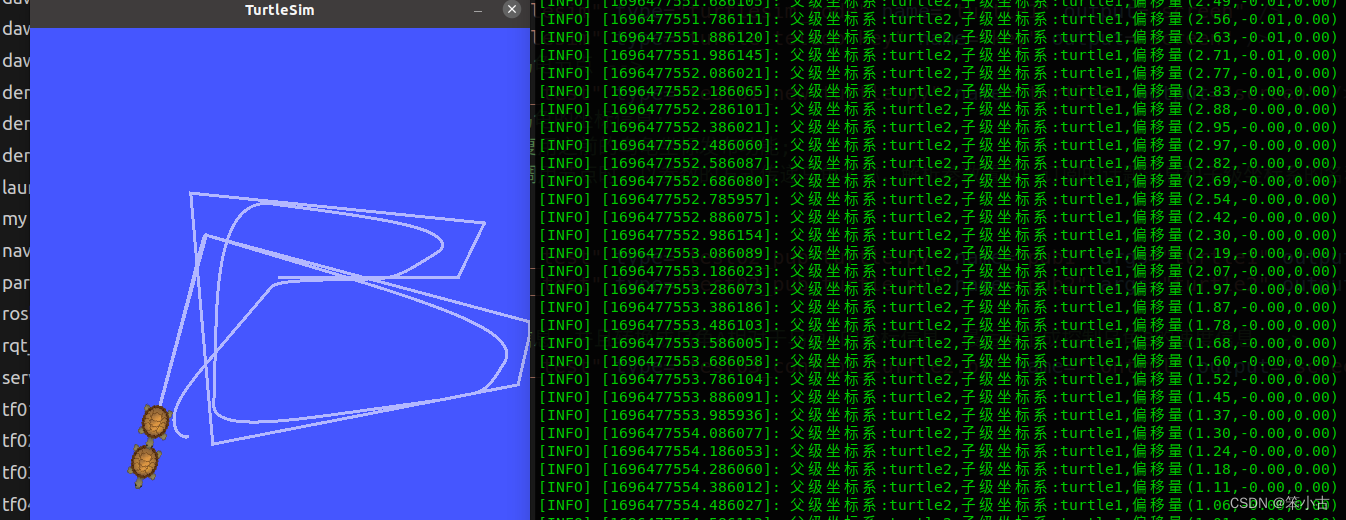
产生两只乌龟,中间的乌龟(A) 和 左下乌龟(B), B 会自动运行至A的位置,并且键盘控制时,只是控制 A 的运动,但是 B 可以跟随 A 运行
输入命令
rosrun turtlesim turtlesim_node 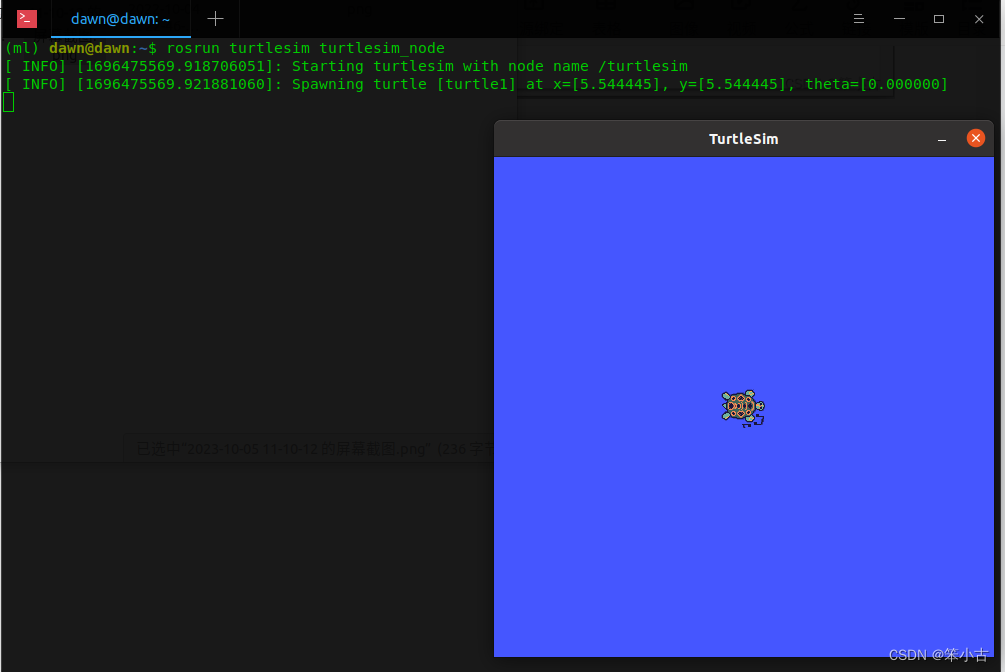
此时只出现了一只小乌龟,那么如何创建第二只小乌龟,并且不受键盘控制而是跟随第一只小乌龟运动呢?我们需要使用rosservice,话题使用的是 spawn.
创建出第二只小乌龟后,需要做的是订阅两只小乌龟的位姿信息并转换为坐标信息,之后获取第一只小乌龟相对于第二只小乌龟的坐标信息,这里要注意是turtle1相对于turtle2的坐标信息,不要搞反了,最后向第二只小乌龟发布相应的速度信息跟随第一只小乌龟。
5.1.6 TF坐标变换实操 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
7.TF2与TF
TF2已经替换了TF,TF2是TF的超集,建议学习 TF2 而非 TF。
TF2 功能包的增强了内聚性,TF 与 TF2 所依赖的功能包是不同的,TF 对应的是tf包,TF2 对应的是tf2和tf2_ros包,在 TF2 中不同类型的 API 实现做了分包处理。
TF2 实现效率更高,比如在:TF2 的静态坐标实现、TF2 坐标变换监听器中的 Buffer 实现等。
坐标变换在机器人系统中是一个极其重要的组成模块,在 ROS 中 TF2 组件是专门用于实现坐标变换的,TF2 实现具体内容又主要介绍了如下几部分:
1.静态坐标变换广播器,可以编码方式或调用内置功能包来实现(建议后者),适用于相对固定的坐标系关系
2.动态坐标变换广播器,以编码的方式广播坐标系之间的相对关系,适用于易变的坐标系关系
3.坐标变换监听器,用于监听广播器广播的坐标系消息,可以实现不同坐标系之间或同一点在不同坐标系之间的变换。
4.机器人系统中的坐标系关系是较为复杂的,还可以通过 tf2_tools 工具包来生成 ros 中的坐标系关系图。