AVL树
AVL树也是二叉搜索树的一种。因为对于普通的二叉搜索树,当插入的数据在有序或接近有序的情况下,二叉搜索树很可能退化成单支树,导致查找效率低下。而AVL树就很好的解决了这个问题。
首先,AVL树是一棵二叉搜索树。同时对于AVL树中每个节点,它的左右子树高度之差的绝对值不超过1。
对于有n个节点的AVL树,其搜索时间复杂度可以稳定的保持在
O
(
l
o
g
2
n
)
O(log_2 n)
O(log2n)。
为了保证向AVL树中插入节点,仍保持其高度的平衡,可以引入平衡因子(平衡因子:右子树的高度 - 左子树的高度)来处理。
// AVL树节点的定义
template<class K, class V>
class AVLTreeNode
{
public:
AVLTreeNode(const pair<K, V>& kv)
: _kv(kv)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _bf(0)
{}
pair<K, V> _kv;
AVLTreeNode<K, V>* _left;
AVLTreeNode<K, V>* _right;
AVLTreeNode<K, V>* _parent;
int _bf; // balance factor
};
因为AVL树仍是二叉搜索树,所以AVL树的插入可以分两步进行:
- 按照二叉搜索树的方式插入新节点
- 调整平衡因子
// AVL树的插入
template<class K, class V>
class AVLTree
{
private:
typedef AVLTreeNode<K, V> Node;
public:
AVLTree(Node* root = nullptr)
: _root(root)
{}
bool Insert(const pair<K, V>& kv)
{
/*
* 1.按照二叉搜索树的方式插入新节点
*/
if (_root == nullptr)
{
_root = new Node(kv);
return true;
}
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (kv.first > cur->_kv.first)
{
parent = cur;
cur = cur->_right;
}
else if (kv.first < cur->_kv.first)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
// 直接插入
cur = new Node(kv);
if (kv.first > parent->_kv.first)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;
/*
* 2.调整平衡因子
*/
while (parent)
{
// 新增在右,parent->_bf++; 新增在左,parent->_bf--;
if (cur == parent->_right)
{
parent->_bf++;
}
else
{
parent->_bf--;
}
// 调整后,parent->_bf == 0, 说明parent插入前的平衡因子是 1 or -1,说明插入前左右子树一边高一边低,插入后两边一样高,
// 即插入填上了矮的一边,插入后parent所在子树高度不变,不需要继续往上调整
if (parent->_bf == 0)
{
break;
}
// 调整后,parent->_bf == 1 or -1, 说明parent插入前的平衡因子是0,插入前左右子树高度相等,插入后有一边变高了,
// parent高度变了,需要继续往上更新
else if (abs(parent->_bf) == 1)
{
parent = parent->_parent;
cur = cur->_parent;
}
// 调整后,parent->_bf == 2 or -2, 说明parent插入前的平衡因子是 1 or -1,已经是平衡临界值,
// 插入后变成了 2 or -2,打破平衡,parent所在子树需要进行 旋转处理
else if (abs(parent->_bf) == 2)
{
// 根据节点插入位置的不同,AVL树的旋转分为四种
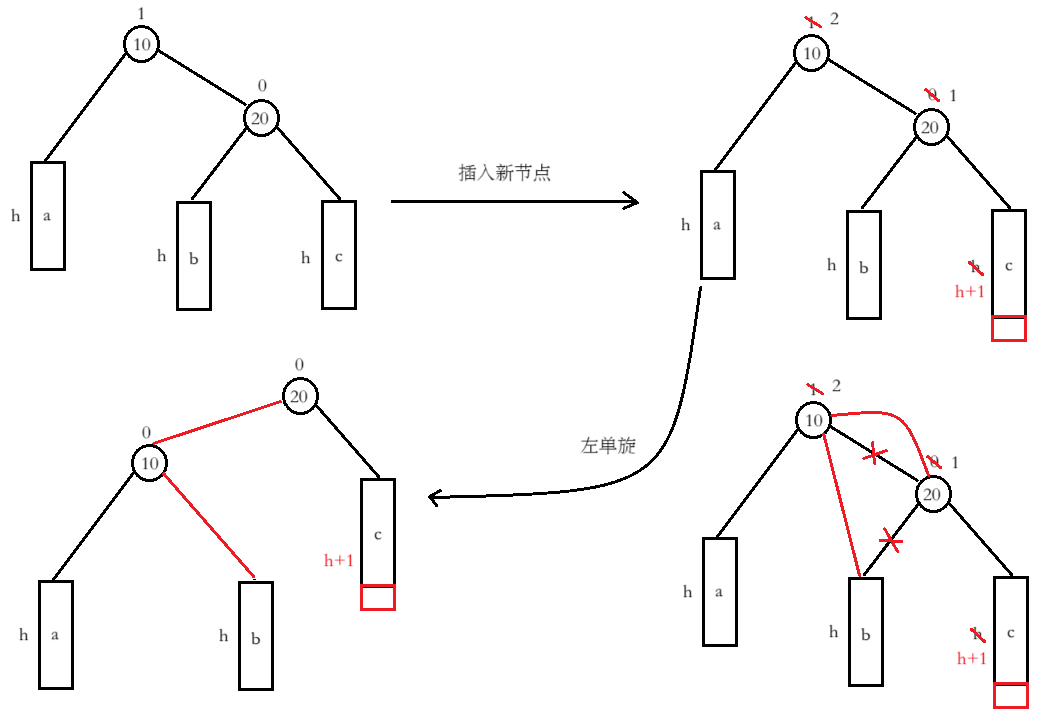
// 新节点插入在较高右子树的右侧(右右)
if (parent->_bf == 2 && cur->_bf == 1)
{
// 左单旋
RotateL(parent);
}
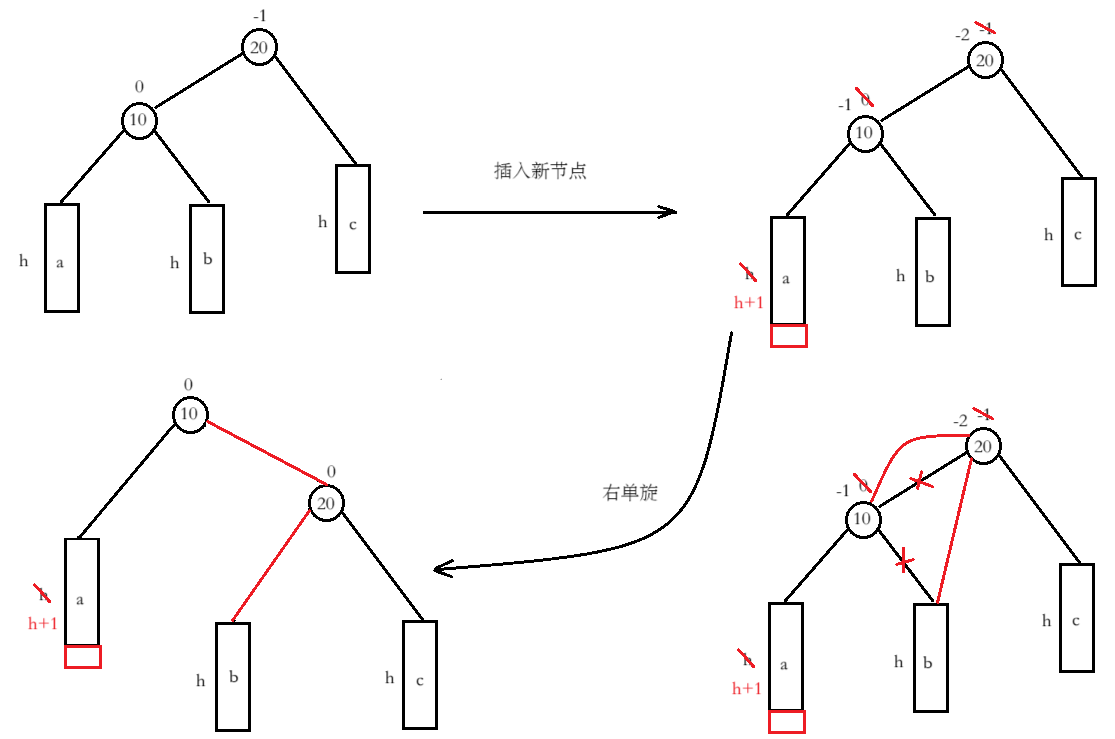
// 新节点插入在较高左子树的左侧(左左)
else if (parent->_bf == -2 && cur->_bf == -1)
{
// 右单旋
RotateR(parent);
}
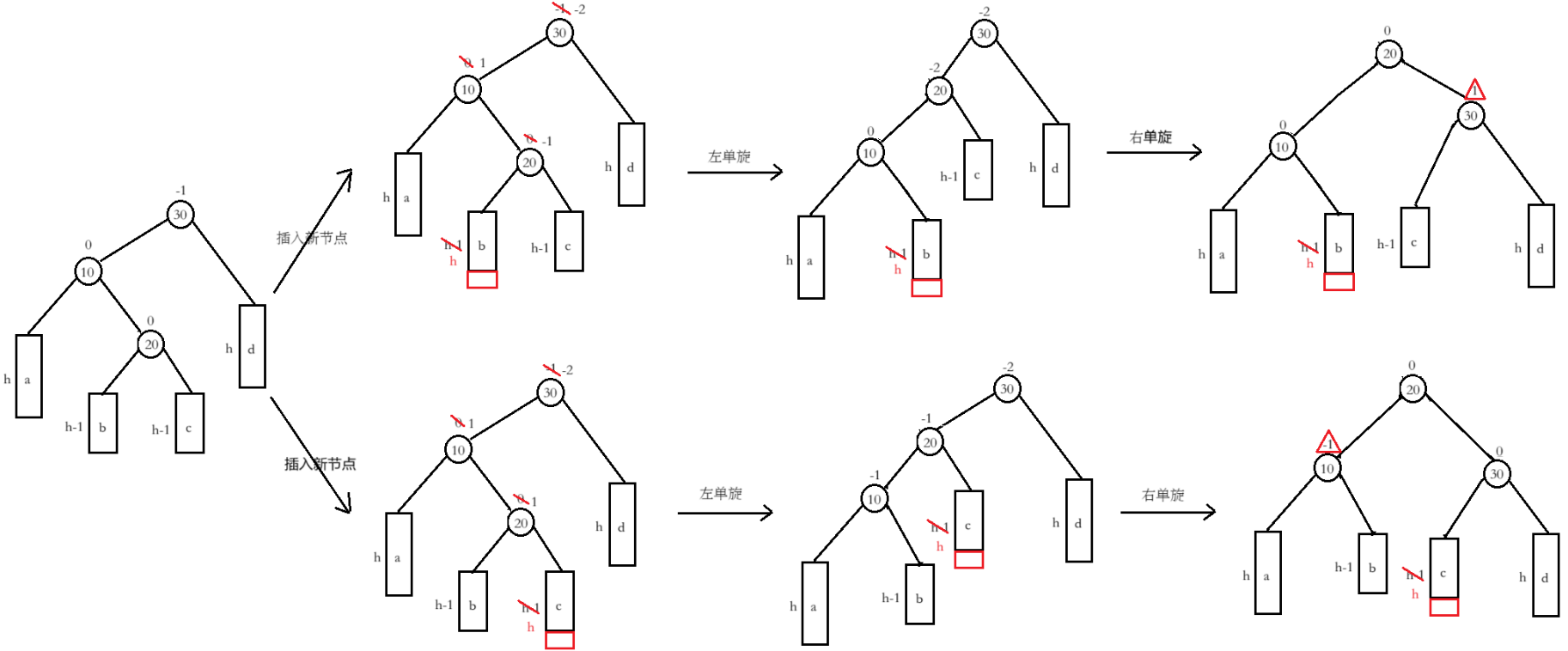
// 新节点插入在较高左子树的右侧(左右)
else if (parent->_bf == -2 && cur->_bf == 1)
{
// 左右双旋
RotateLR(parent);
}
// 新节点插入在较高右子树的左侧(右左)
else if (parent->_bf == 2 && cur->_bf == -1)
{
// 右左双旋
RotateRL(parent);
}
else
{
assert(false);
}
break;
}
// 调整后,不可能出现parent->_bf > 2 or < -2,否则一定出bug了
else
{
assert(abs(parent->_bf) <= 2);
}
}
return true;
}
private:
// 左单旋
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL)
{
subRL->_parent = parent;
}
// 保存parent的双亲节点
Node* ppNode = parent->_parent;
subR->_left = parent;
parent->_parent = subR;
// parent作为整棵树的根存在
if (_root == parent)
{
_root = subR;
subR->_parent = nullptr;
}
// parent作为子树的根存在
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subR;
}
else
{
ppNode->_right = subR;
}
subR->_parent = ppNode;
}
subR->_bf = parent->_bf = 0;
}
// 右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
{
subLR->_parent = parent;
}
Node* ppNode = parent->_parent;
subL->_right = parent;
parent->_parent = subL;
if (_root == parent)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subL;
}
else
{
ppNode->_right = subL;
}
subL->_parent = ppNode;
}
subL->_bf = parent->_bf = 0;
}
// 左右双旋
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
// 保存subLR当前的平衡因子
int bf = subLR->_bf;
// 先左单旋
RotateL(parent->_left);
// 再右单旋
RotateR(parent);
// 此处对于平衡因子的调整,建议画图分析
subLR->_bf = 0;
if (bf == 1)
{
parent->_bf = 0;
subL->_bf = -1;
}
else if (bf == -1)
{
parent->_bf = 1;
subL->_bf = 0;
}
else if(bf == 0)
{
parent->_bf = 0;
subL->_bf = 0;
}
else
{
assert(false);
}
}
// 右左双旋
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
int bf = subRL->_bf;
RotateR(parent->_right);
RotateL(parent);
subRL->_bf = 0;
if (bf == 1)
{
parent->_bf = -1;
subR->_bf = 0;
}
else if (bf == -1)
{
parent->_bf = 0;
subR->_bf = 1;
}
else if (bf == 0)
{
parent->_bf = 0;
subR->_bf = 0;
}
else
{
assert(false);
}
}
private:
Node* _root;
};
RotateL左单旋示意图:
RotateR右单旋示意图:
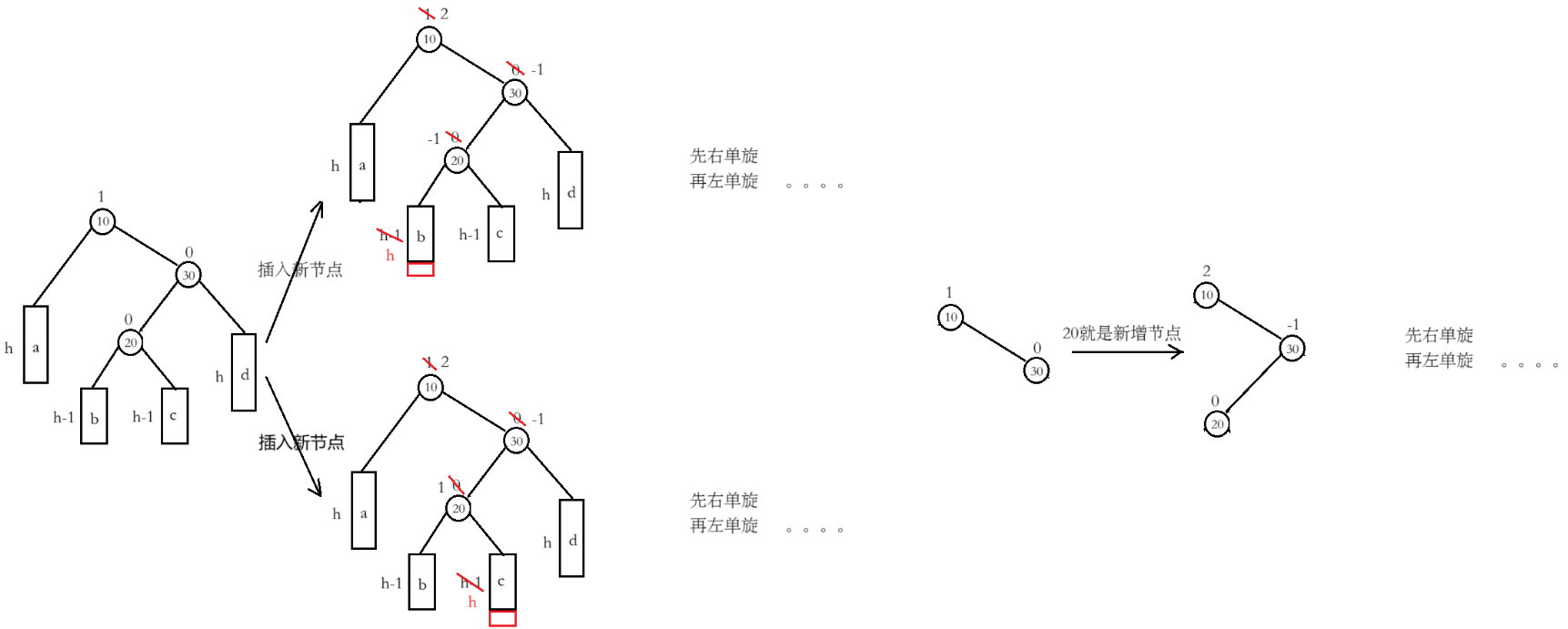
RotateLR左右双旋示意图:

RotateRL右左双旋示意图:
可以通过下面程序对AVL树的正确性做一个验证。
template<class K, class V>
class AVLTree
{
private:
typedef AVLTreeNode<K, V> Node;
public:
// 1.验证其为二叉搜索树
void InOrderTraversal()
{
_InOrderTraversal(_root);
}
// 2.验证其为平衡树
bool IsBalance()
{
return _IsBalance(_root);
}
private:
// 如果中序遍历为有序序列,则说明为二叉搜索树
void _InOrderTraversal(Node* root)
{
if (root == nullptr)
{
return;
}
_InOrderTraversal(root->_left);
cout << root->_kv.first << " : " << root->_kv.second << endl;
_InOrderTraversal(root->_right);
}
// 要求每个节点的子树高度差的绝对值不超过1,并且高度差要和平衡因子相等
bool _IsBalance(Node* root)
{
// 空树也算AVL树
if (root == nullptr)
{
return true;
}
int leftHt = Height(root->_left);
int rightHt = Height(root->_right);
int diff = rightHt - leftHt;
if (diff != root->_bf)
{
cout << root->_kv.first << "平衡因子异常" << endl;
return false;
}
return abs(diff) < 2
&& _IsBalance(root->_left)
&& _IsBalance(root->_right);
}
int Height(Node* root)
{
if (root == nullptr)
return 0;
int leftHt = Height(root->_left);
int rightHt = Height(root->_right);
return max(leftHt, rightHt) + 1;
}
private:
Node* _root;
};
红黑树
红黑树也是二叉搜索树的一种。
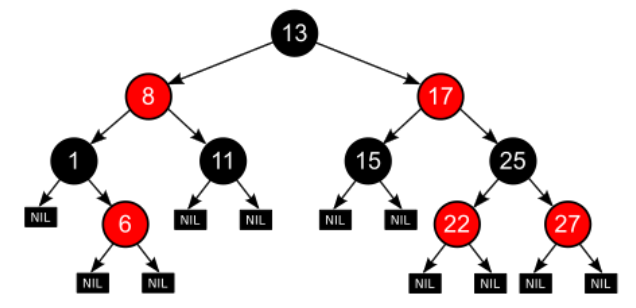
红黑树的性质要求如下:
- 每个节点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子节点必须是黑色的(或者说不允许存在父子节点同时为红色)
- 对于每个节点,从该节点到其后代叶节点的所有简单路径上,都只包含相同数量的黑色节点
- 所有的叶节点都是黑色的(叶节点指的是NIL节点)
通过以上5条性质的约束,就可以确保红黑树中
最长路径
≤
2
×
最短路径
最长路径 \leq 2 \times 最短路径
最长路径≤2×最短路径,从而来保证了红黑树的平衡性能。
虽然红黑树的平衡性能比AVL的略差些,但插入同样的数据,红黑树旋转更少。
// 红黑树节点的定义
enum Colour
{
RED,
BLACK
};
template<class K, class V>
class RBTreeNode
{
public:
RBTreeNode(const pair<K, V>& kv)
: _kv(kv)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
{}
pair<K, V> _kv;
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
Colour _col;
};
因为红黑树仍是二叉搜索树,所以红黑树的插入可以分两步进行:
- 按照二叉搜索树的方式插入新节点
- 检测插入新节点后,红黑树的性质是否受到破坏,并做变色或旋转调整
template<class K, class V>
class RBTree
{
private:
typedef RBTreeNode<K, V> Node;
public:
RBTree(Node* root = nullptr)
: _root(root)
{}
bool Insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
// 根节点是黑色的
_root->_col = BLACK;
return true;
}
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (kv.first > cur->_kv.first)
{
parent = cur;
cur = cur->_right;
}
else if (kv.first < cur->_kv.first)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
// 直接插入新节点
cur = new Node(kv);
// 对于插入的新节点赋为红色
cur->_col = RED;
if (kv.first > parent->_kv.first)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;
// 如果父节点存在且为黑,没有破坏红黑树的规则,不需要调整
// 如果父节点存在且为红,破坏了性质3
while (parent && parent->_col == RED)
{
// 此时祖父节点一定存在且为黑
Node* grandparent = parent->_parent;
assert(grandparent);
assert(grandparent->_col == BLACK);
// 关键看叔叔(节点)
// parent 为 grandparent 的左孩子
if (parent == grandparent->_left)
{
Node* uncle = grandparent->_right;
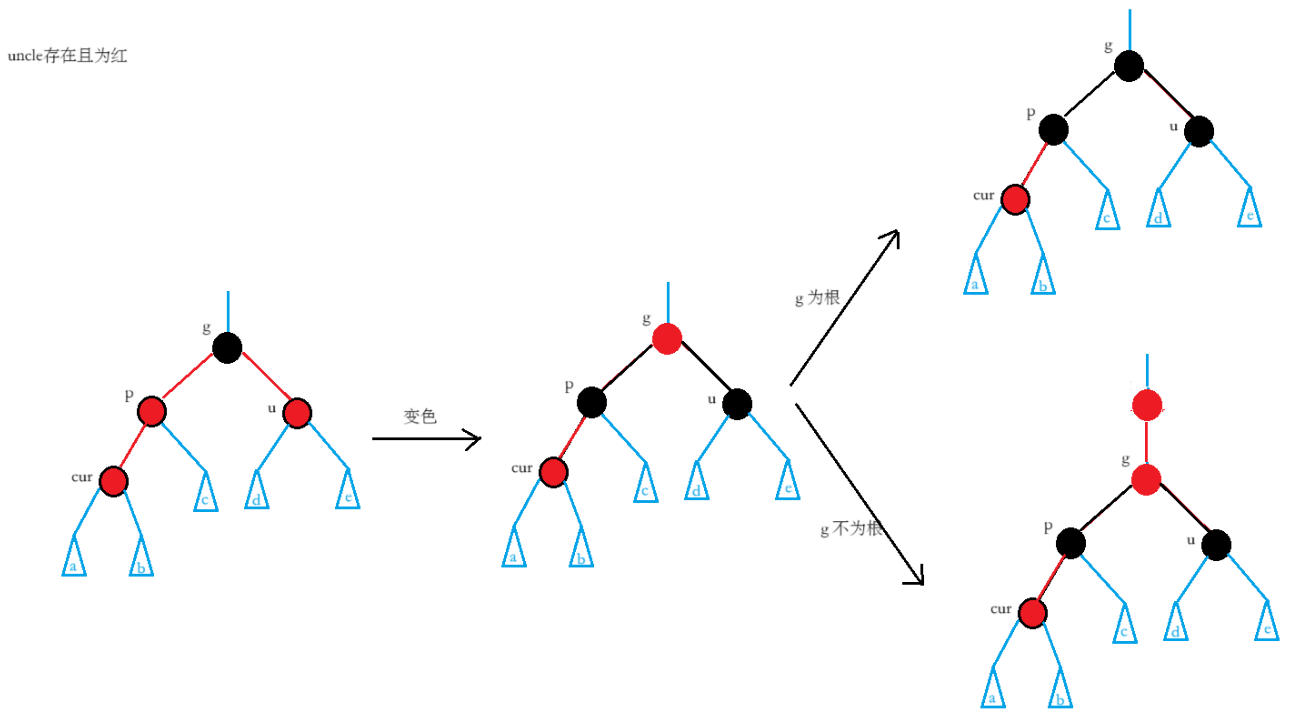
// 情况一 uncle存在且为红
if (uncle && uncle->_col == RED)
{
// 将 parent 和 uncle 改为黑,grandparent 改为红,
parent->_col = uncle->_col = BLACK;
grandparent->_col = RED;
// 然后把 grandparent 当成 cur,继续向上调整
cur = grandparent;
parent = cur->_parent;
}
// 情况二三 uncle不存在,或uncle存在且为黑
else
{
// parent 为 grandparent 的左孩子,且 cur 为 parent 的左孩子
if (cur == parent->_left)
{
// 右单旋
RotateR(grandparent);
// 变色: parent 变黑,grandparent 变红
parent->_col = BLACK;
grandparent->_col = RED;
}
// parent 为 grandparent 的左孩子,且 cur 为 parent 的右孩子
else
{
// 左右双旋
RotateL(parent);
RotateR(grandparent);
// 变色: parent 变黑,grandparent 变红
cur->_col = BLACK;
grandparent->_col = RED;
}
break;
}
}
// parent 为 grandparent 的右孩子
else
{
Node* uncle = grandparent->_left;
// 情况一 uncle存在且为红
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandparent->_col = RED;
cur = grandparent;
parent = cur->_parent;
}
// 情况二三 uncle不存在,或uncle存在且为黑
else
{
// parent 为 grandparent 的右孩子,且 cur 为 parent 的右孩子
if (cur == parent->_right)
{
RotateL(grandparent);
parent->_col = BLACK;
grandparent->_col = RED;
}
// parent 为 grandparent 的右孩子,且 cur 为 parent 的左孩子
else
{
RotateR(parent);
RotateL(grandparent);
cur->_col = BLACK;
grandparent->_col = RED;
}
break;
}
}
}
_root->_col = BLACK;
return true;
}
private:
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL)
{
subRL->_parent = parent;
}
Node* ppNode = parent->_parent;
subR->_left = parent;
parent->_parent = subR;
if (_root == parent)
{
_root = subR;
subR->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subR;
}
else
{
ppNode->_right = subR;
}
subR->_parent = ppNode;
}
}
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
{
subLR->_parent = parent;
}
Node* ppNode = parent->_parent;
subL->_right = parent;
parent->_parent = subL;
if (_root == parent)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subL;
}
else
{
ppNode->_right = subL;
}
subL->_parent = ppNode;
}
}
private:
Node* _root;
};
uncle存在且为红:
可以通过下面程序对红黑树的正确性做一个验证。
template<class K, class V>
class RBTree
{
private:
typedef RBTreeNode<K, V> Node;
public:
// 1.验证其为二叉搜索树
void InOrderTraversal()
{
_InOrderTraversal(_root);
}
// 2. 通过红黑树的性质验证其平衡性
bool IsBalance()
{
// 空树也算红黑树
if (_root == nullptr)
{
return true;
}
// 验证性质2
if (_root->_col == RED)
{
cout << "根节点不是黑色" << endl;
return false;
}
// benchmark作为每条路径上黑色节点数量的基准值
int benchmark = 0;
Node* cur = _root;
while (cur)
{
if (cur->_col == BLACK)
{
++benchmark;
}
cur = cur->_left;
}
return PrevCheck(_root, 0, benchmark);
}
private:
// 如果中序遍历为有序序列,则说明为二叉搜索树
void _InOrderTraversal(Node* root)
{
if (root == nullptr)
{
return;
}
_InOrderTraversal(root->_left);
cout << root->_kv.first << " : " << root->_kv.second << endl;
_InOrderTraversal(root->_right);
}
bool PrevCheck(Node* root, int blackNum, int benchmark)
{
if (root == nullptr)
{
// 验证性质4
if (blackNum != benchmark)
{
cout << "路径上黑色节点数量不相等" << endl;
return false;
}
else
{
return true;
}
}
// 验证性质3
if (root->_col == RED && root->_parent->_col == RED)
{
cout << "存在连续的红色节点" << endl;
return false;
}
if (root->_col == BLACK)
{
++blackNum;
}
return PrevCheck(root->_left, blackNum, benchmark)
&& PrevCheck(root->_right, blackNum, benchmark);
}
private:
Node* _root;
};
红黑树相比AVL树不追求绝对的平衡,其只需保证最长路径不超过最短路径的2倍即可,所以相对而言红黑树减少了插入时旋转的次数,在经常需要进行增删的结构中性能比AVL树更优,实际运用中也是红黑树更多。