0. 内容
由于我们是要做一个实时的定位系统,而不是SfM那种离线的三维重建的工作,所以需要在滑动窗口中不断地添加新数据以及删除旧数据,而前者可以把所有数据放在一个BA中求解。
1. 从高斯分布到信息矩阵
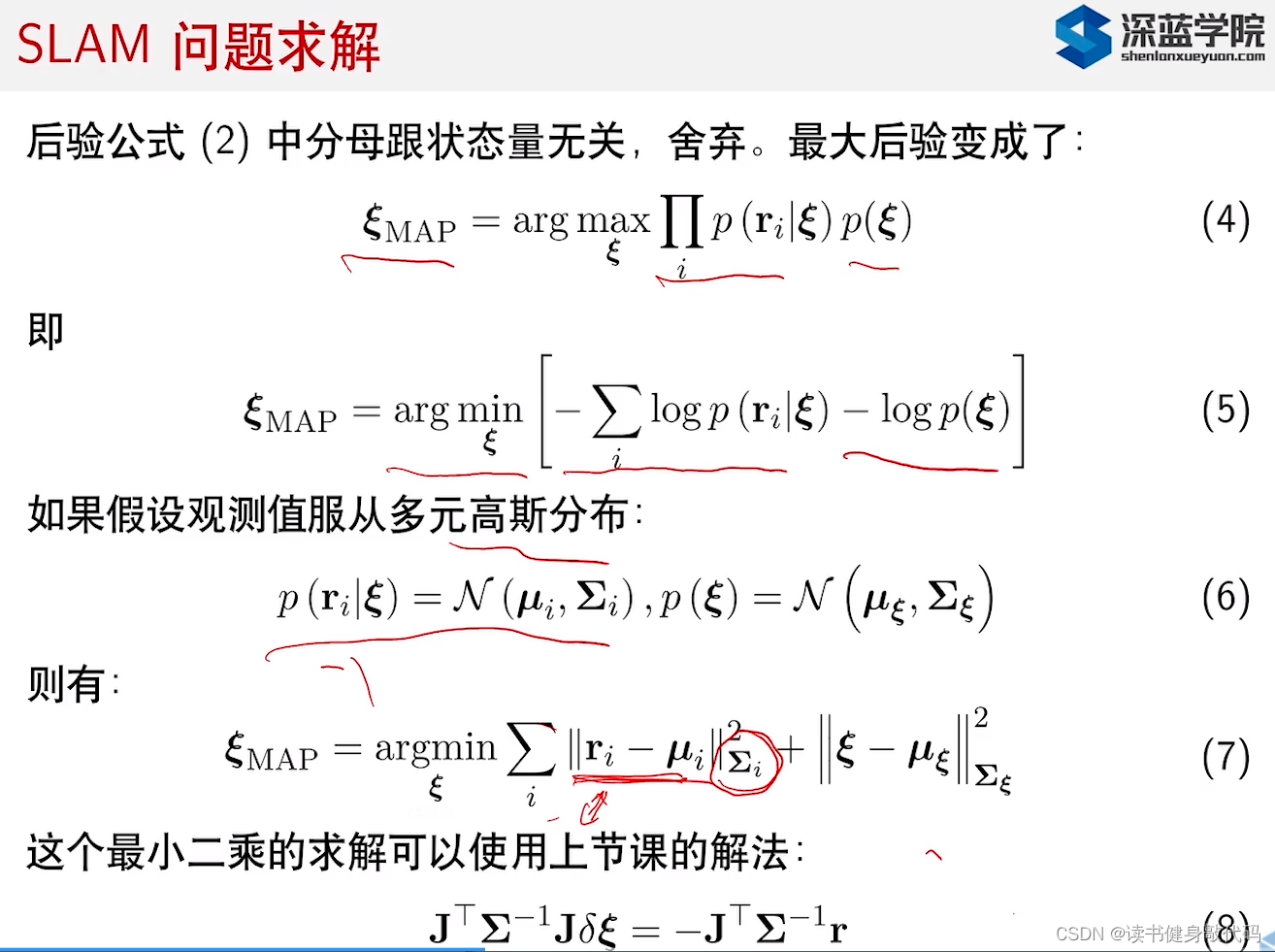
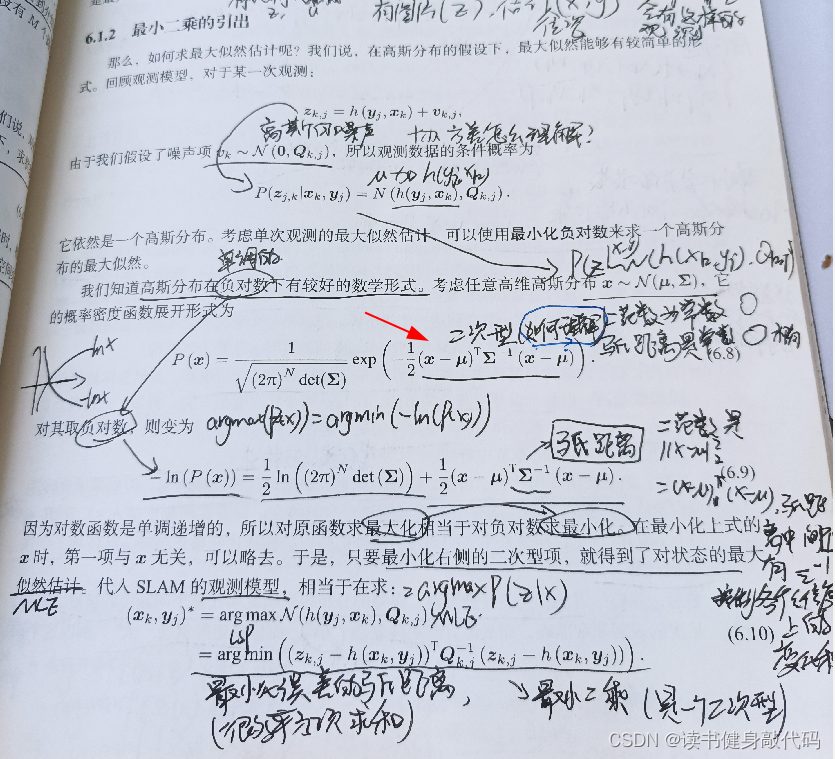
SLAM问题的建模,MAP->MLE->LSP,我们只关心最大后验分布的那个点
这个
Σ
−
1
\Sigma^{-1}
Σ−1表示的是每次观测所占的权重,可调,也有方法可以动态地估计出。
Σ
−
1
\Sigma^{-1}
Σ−1,可以看论文。
之前的正规矩阵中没有写
Σ
−
1
\Sigma^{-1}
Σ−1是因为当时设为单位阵,实际上中间是有个权重矩阵
Σ
−
1
\Sigma^{-1}
Σ−1的

如图中的绿框

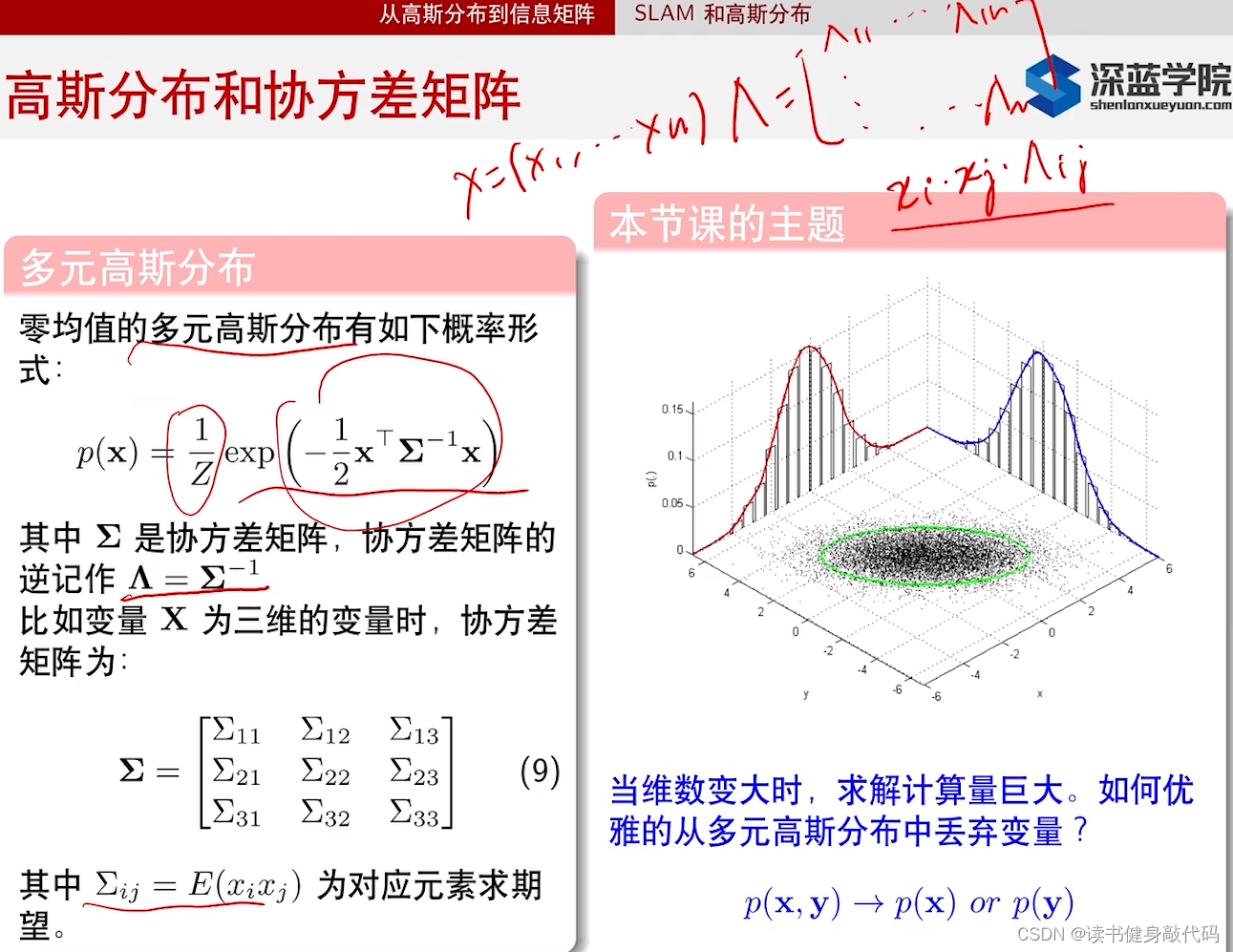
协方差对角线元素为对应下标的元素的协方差,由于是零均值,所以
μ
=
0
\mu=0
μ=0。
右边表示x和y之间的相关性情况,如果是严格线性的,那点的分布就是一条直线,但是明显不是严格线性的,即协方差矩阵非对角元素不为0。
计算方法参考下图:
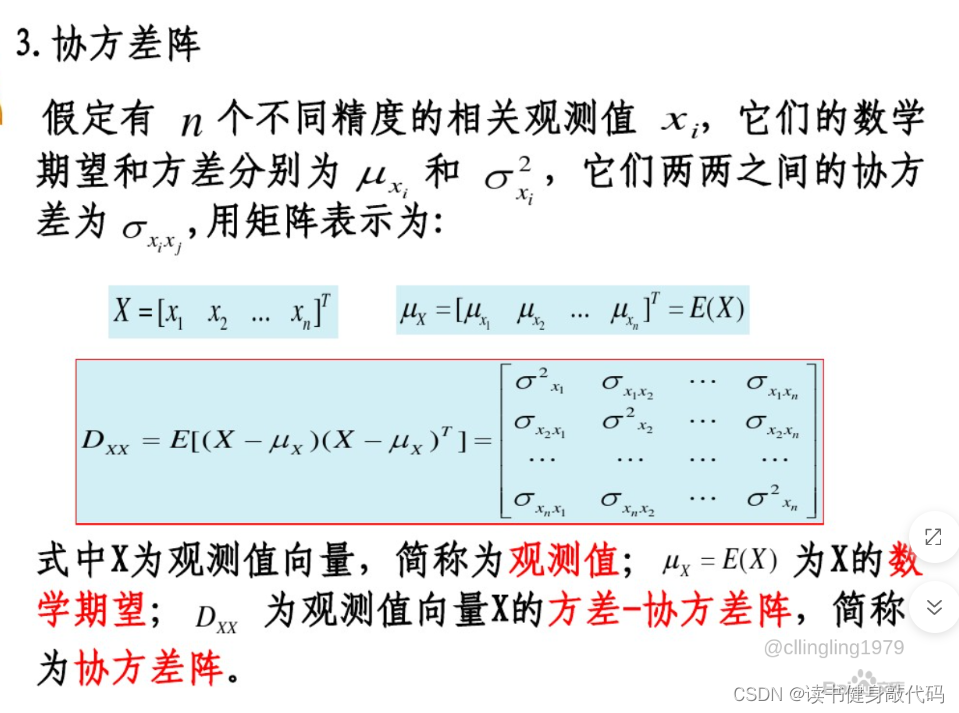
所以零均值的分布,
C
o
v
(
x
i
x
j
)
=
E
(
x
i
x
j
)
−
E
(
x
i
)
E
(
x
j
)
=
E
(
x
i
x
j
)
Cov(x_ix_j)=E(x_ix_j)-E(x_i)E(x_j)=E(x_ix_j)
Cov(xixj)=E(xixj)−E(xi)E(xj)=E(xixj)(下面式(11)用到)
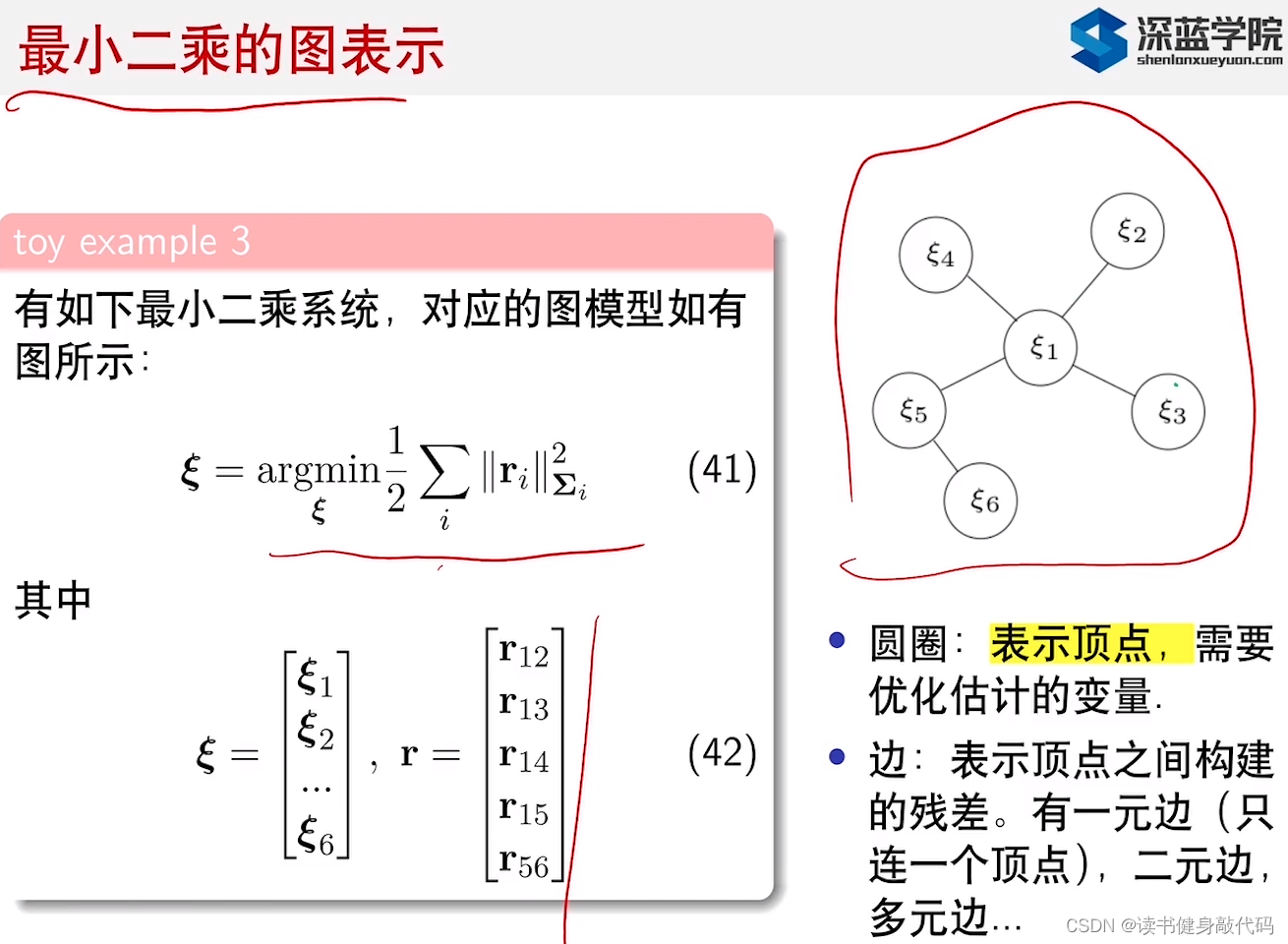
本节课主题:如何往窗口中加新的变量以及把旧的变量删掉。
下面的例子有助于我们理解SLAM问题中的信息矩阵 H H H的组成。
1.1 例子1
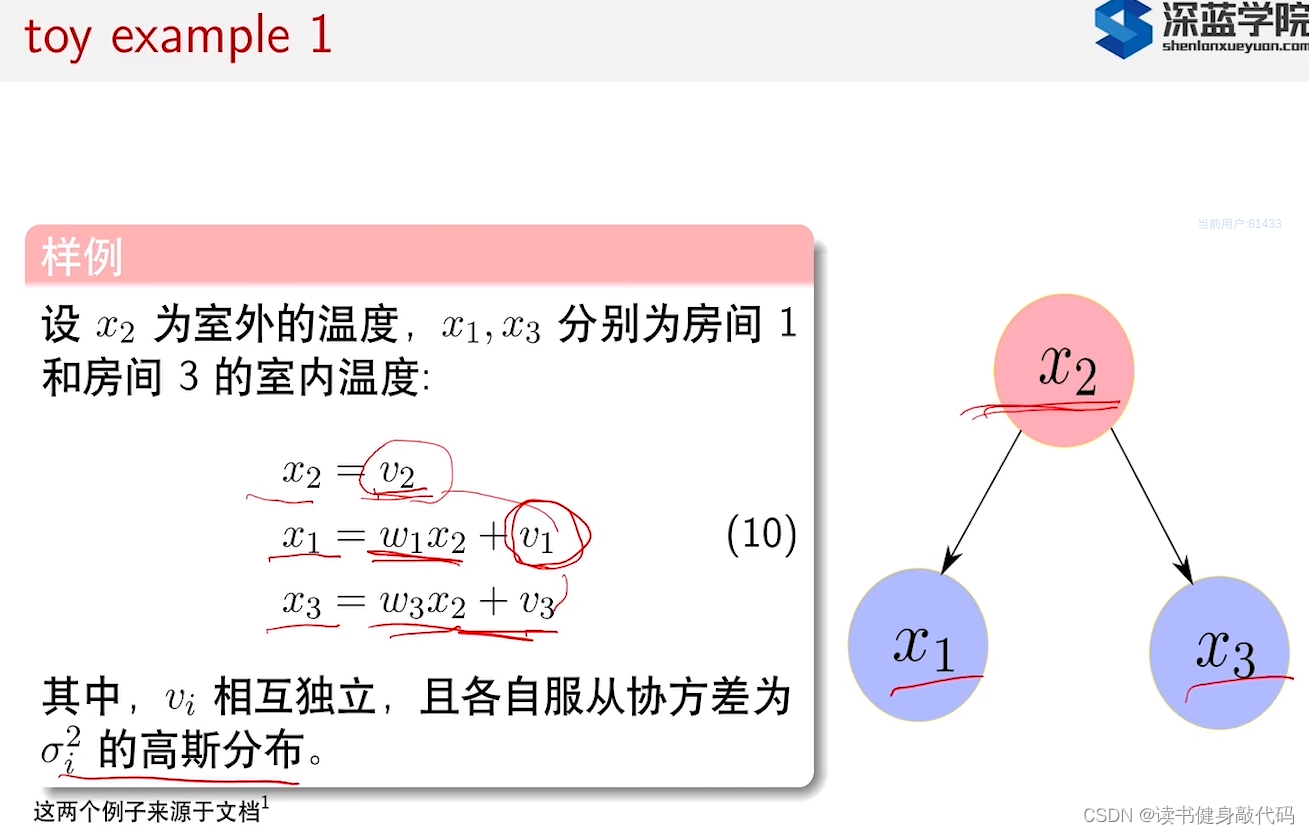
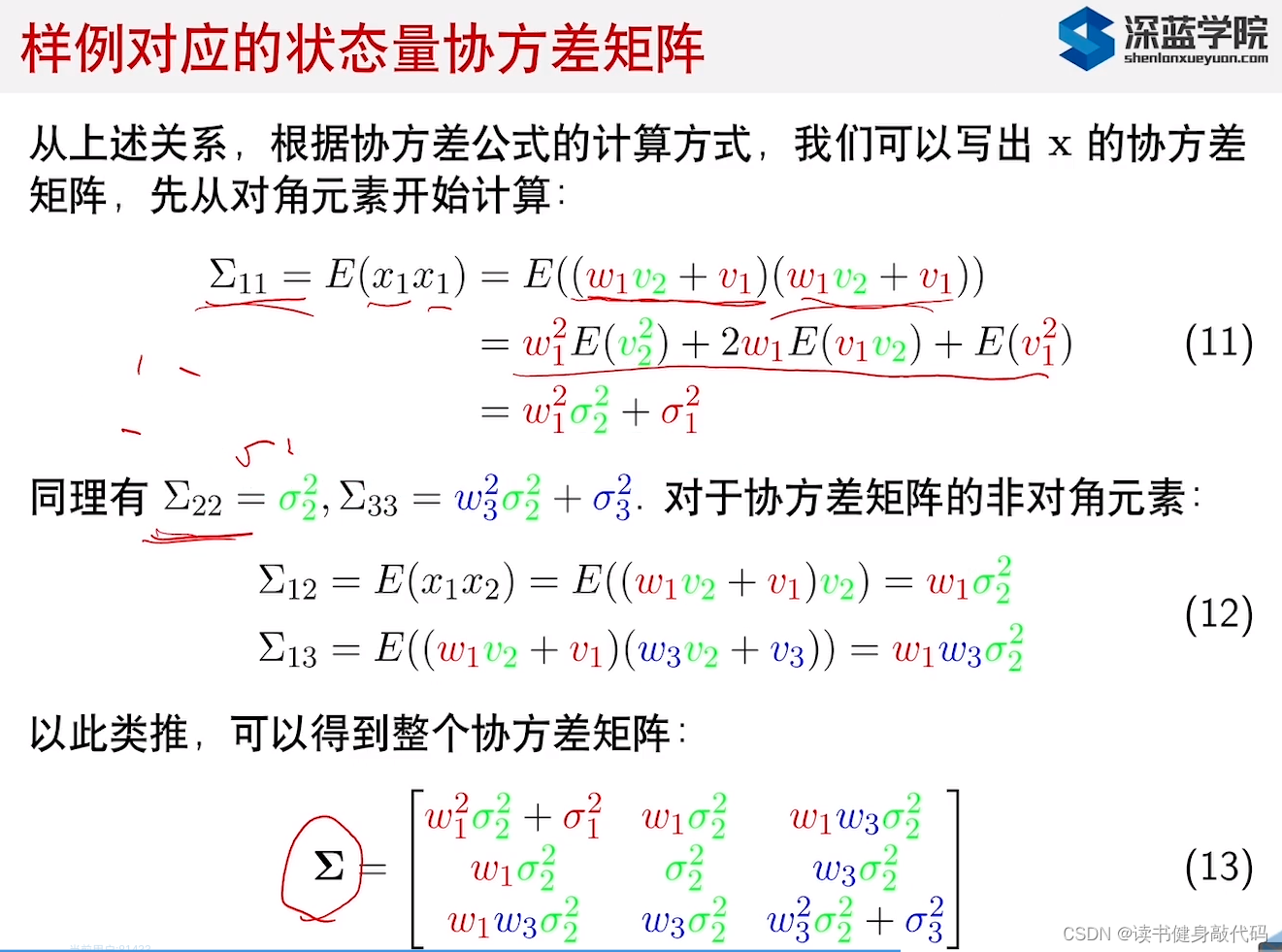
对于(11),此处是写为了标量形式,回顾第3章3.3节的结论:
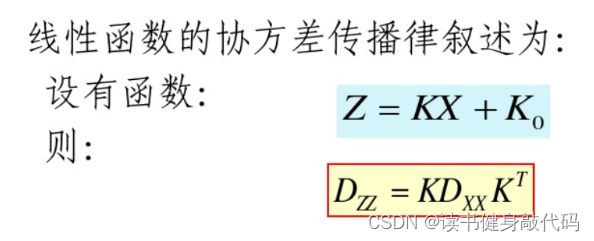
(11)的结果写成矩阵形式就是 ω 1 σ 2 2 ω 1 T + σ 1 2 \omega_1\sigma_2^2\omega_1^T+\sigma_1^2 ω1σ22ω1T+σ12
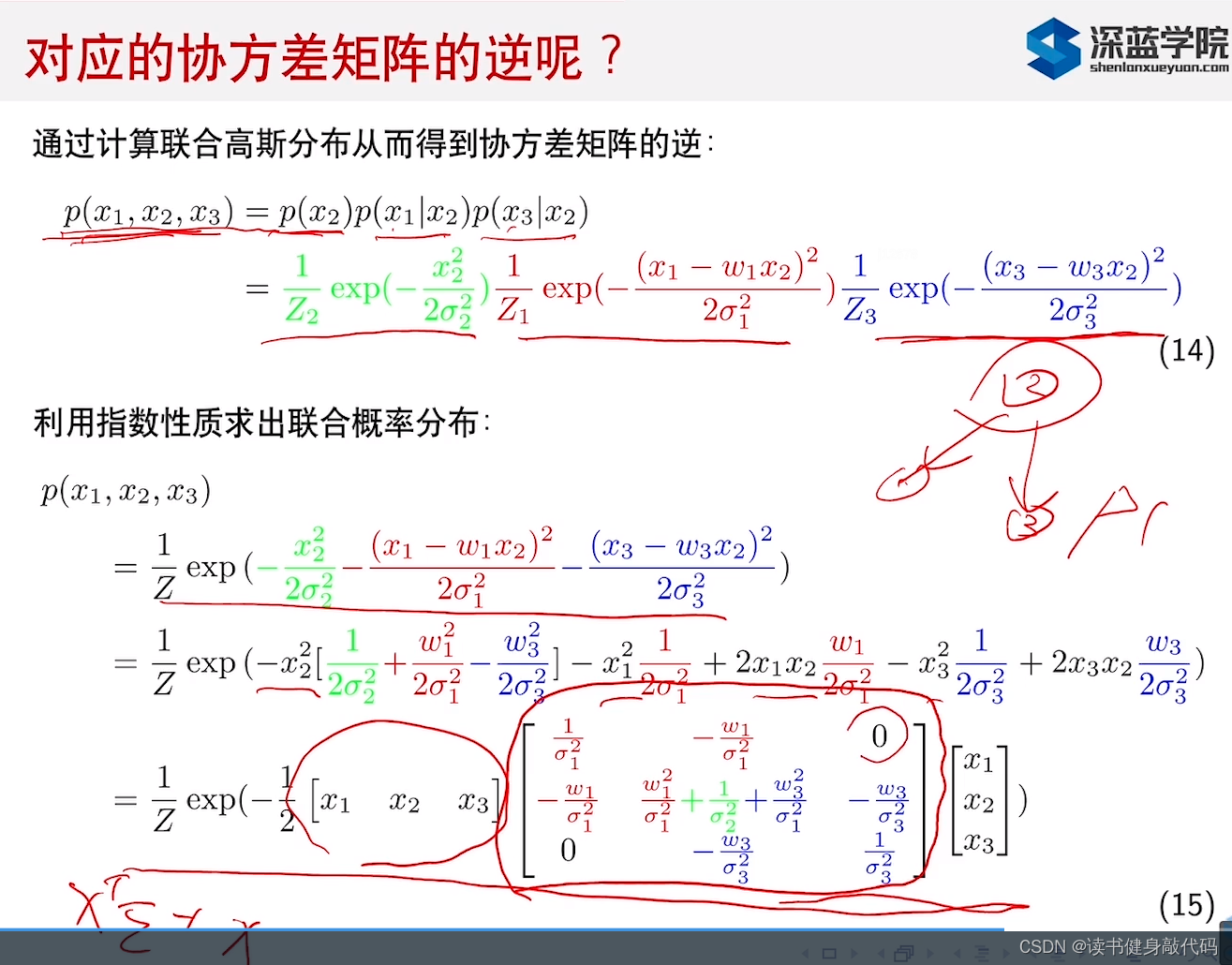
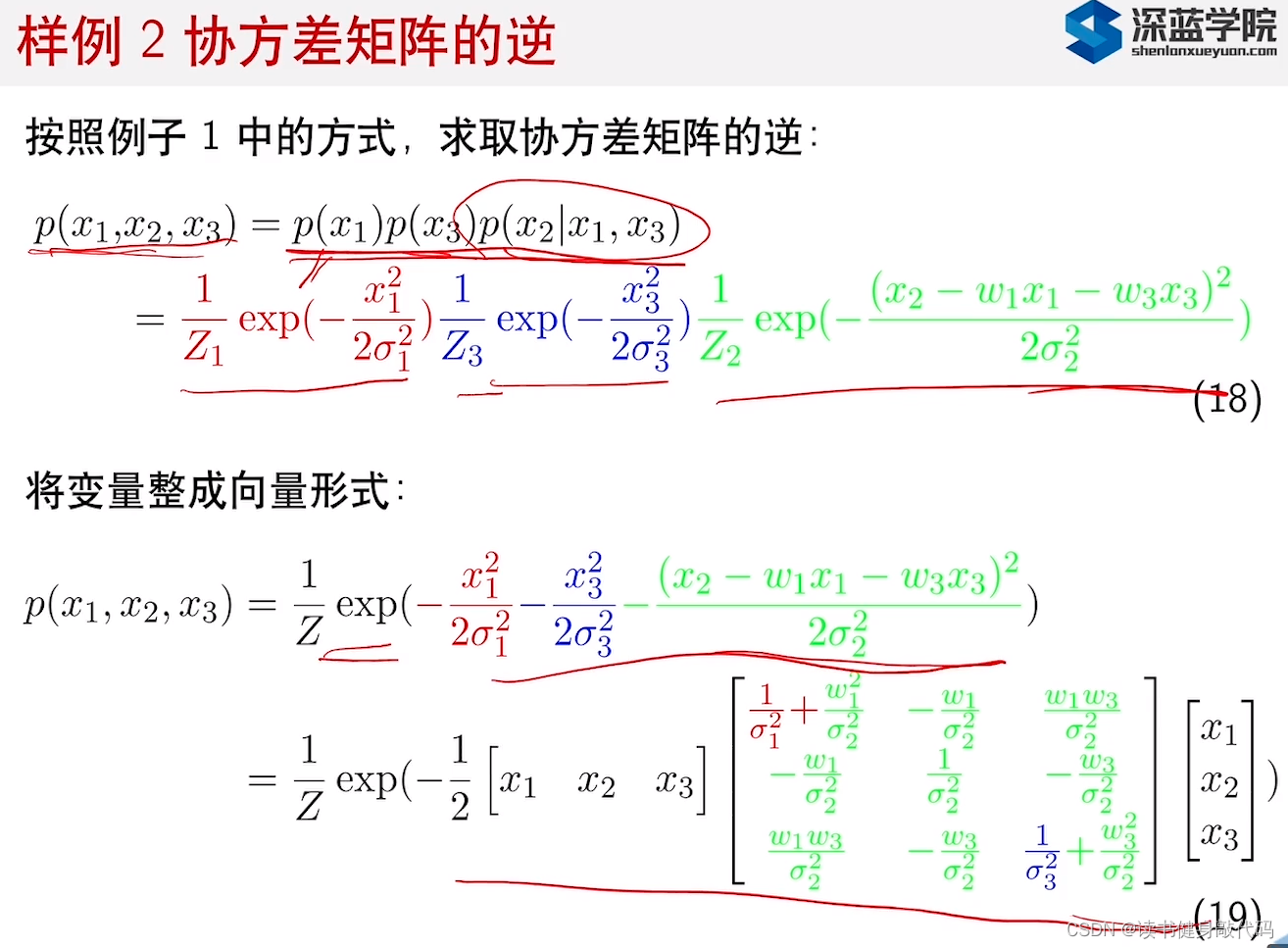
求协方差矩阵的逆,可以直接对(13)求逆,但是麻烦,还可以通过计算联合高斯分布来得到协方差矩阵的逆:
有
条件
=
联合
边缘
,上述有向无环图箭头的起点表示条件,终点表示结果。故
条件=\frac{联合}{边缘},上述有向无环图箭头的起点表示条件,终点表示结果。故
条件=边缘联合,上述有向无环图箭头的起点表示条件,终点表示结果。故(14)由来:
p
(
x
1
,
x
2
,
x
3
)
=
p
(
x
1
,
x
3
∣
x
2
)
∗
p
(
x
2
)
=
p
(
x
1
∣
x
2
)
∗
p
(
x
3
∣
x
2
)
∗
p
(
x
2
)
p(x_1,x_2,x_3)=p(x_1,x_3|x_2)*p(x_2)=p(x_1|x_2)*p(x_3|x_2)*p(x_2)
p(x1,x2,x3)=p(x1,x3∣x2)∗p(x2)=p(x1∣x2)∗p(x3∣x2)∗p(x2)
不清楚为什么(14)可以这样写,本来从协方差矩阵中可以看出
x
1
,
x
3
x_1,x_3
x1,x3不是相互独立的,但是写出来的感觉好像是独立的。(这个问题在下面有解释)
然后就是通分,结合高斯分布的形式:
可以看出协方差矩阵的逆就是中间的那个矩阵。
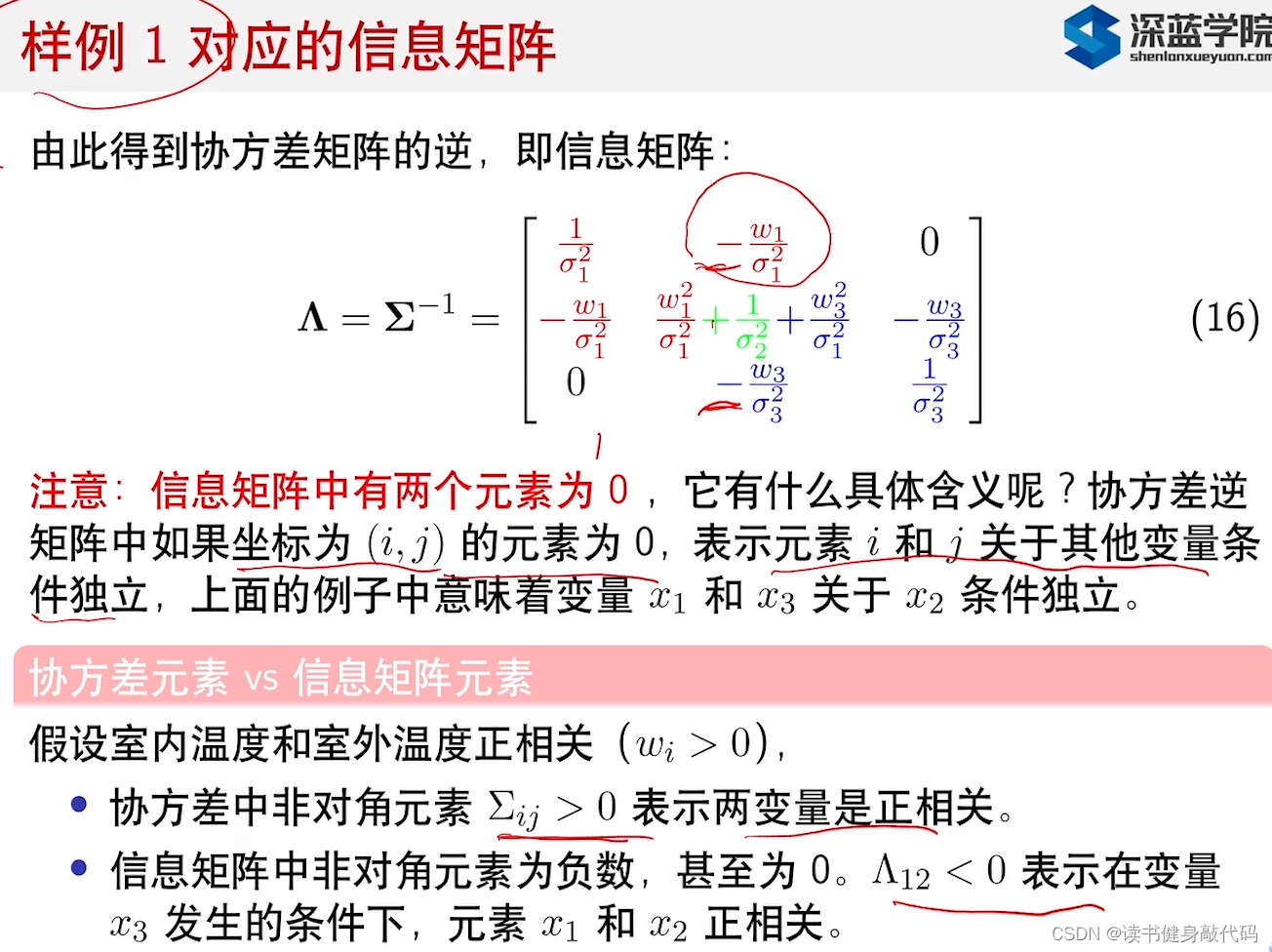
回答上面的问题,从 Σ − 1 \Sigma^{-1} Σ−1可以看出, Σ 13 = Σ 31 = 0 \Sigma_{13}=\Sigma_{31}=0 Σ13=Σ31=0,代表在变量 x 2 x_2 x2的条件下, x 1 , x 3 x_1, x_3 x1,x3是相互独立的。即当房间2的温度( x 2 x_2 x2)确定时,房间1,3的温度( x 1 , x 3 ) x_1, x_3) x1,x3)互不影响,相互独立。所以其实上面推导(14)时已经是使用了“在 x 2 x_2 x2的条件下, x 1 , x 3 x_1, x_3 x1,x3相互独立”这个结论。
协方差矩阵和信息矩阵的符号所代表的含义不同。
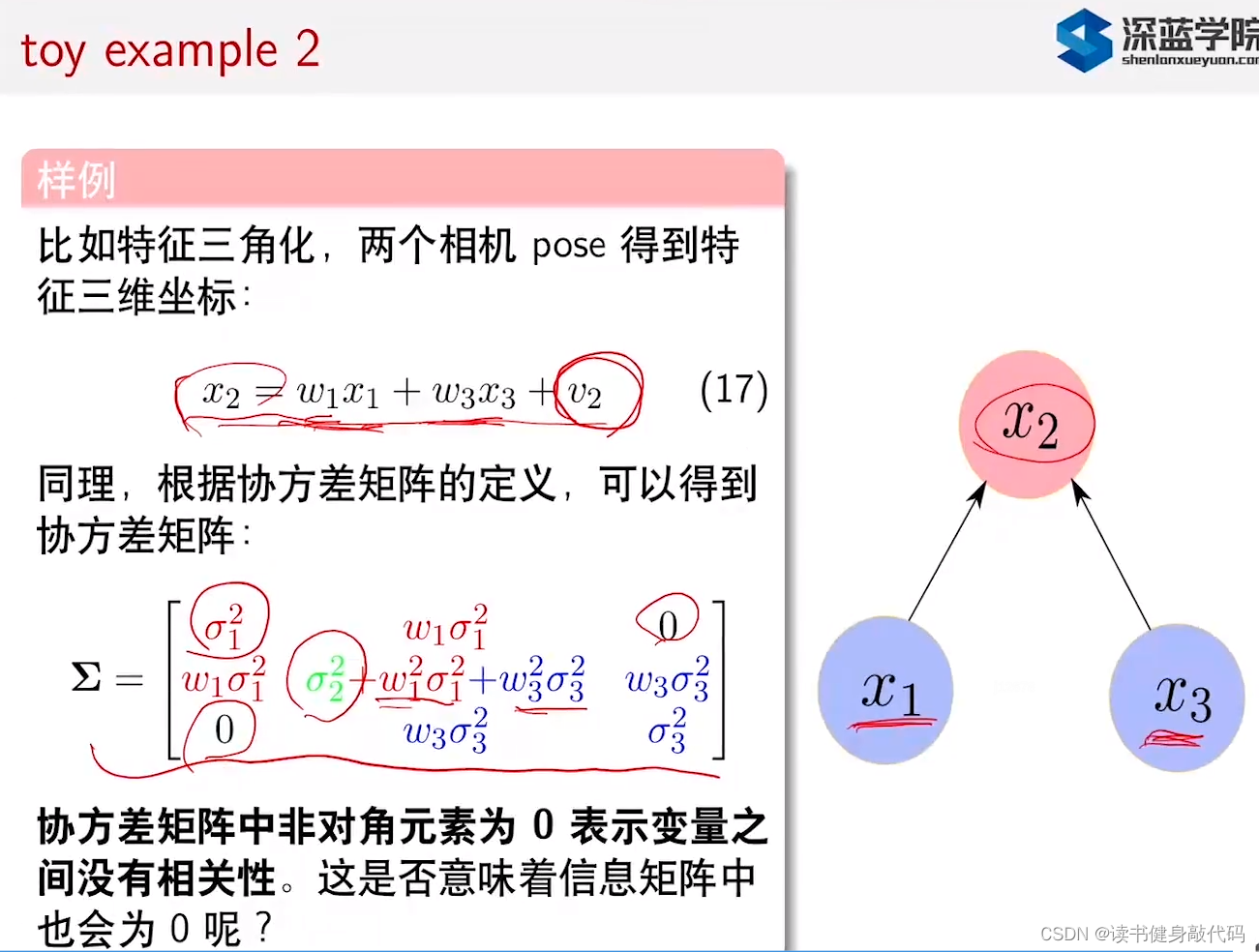
1.2 例子2
同样地,
联合
=
条件
∗
边缘
联合=条件*边缘
联合=条件∗边缘,
x
1
,
x
3
x_1, x_3
x1,x3独立,(18)推导:
p
(
x
1
,
x
2
,
x
3
)
=
p
(
x
2
∣
x
1
,
x
3
)
∗
p
(
x
1
,
x
3
)
=
p
(
x
2
∣
x
1
,
x
3
)
∗
p
(
x
1
)
∗
p
(
x
3
)
p(x_1,x_2,x_3)=p(x_2|x_1,x_3)*p(x_1,x_3)=p(x_2|x_1,x_3)*p(x_1)*p(x_3)
p(x1,x2,x3)=p(x2∣x1,x3)∗p(x1,x3)=p(x2∣x1,x3)∗p(x1)∗p(x3)
Σ
13
=
0
\Sigma_{13}=0
Σ13=0但是
(
Σ
−
1
)
13
>
0
(\Sigma^{-1})_{13}>0
(Σ−1)13>0,表示当
x
2
x_2
x2确定时,
x
1
,
x
3
x_1, x_3
x1,x3呈负相关,对应实际问题就是:房间2中的温度一定时,房间1温度高点的话,房间3温度就要低一点才能保证房间2中温度一定。
上面的节点和边是一个有向无环图,是贝叶斯图论中的东西(之前有博士师姐研究这个的,每次听她汇报都一脸问号,压根听不懂)。
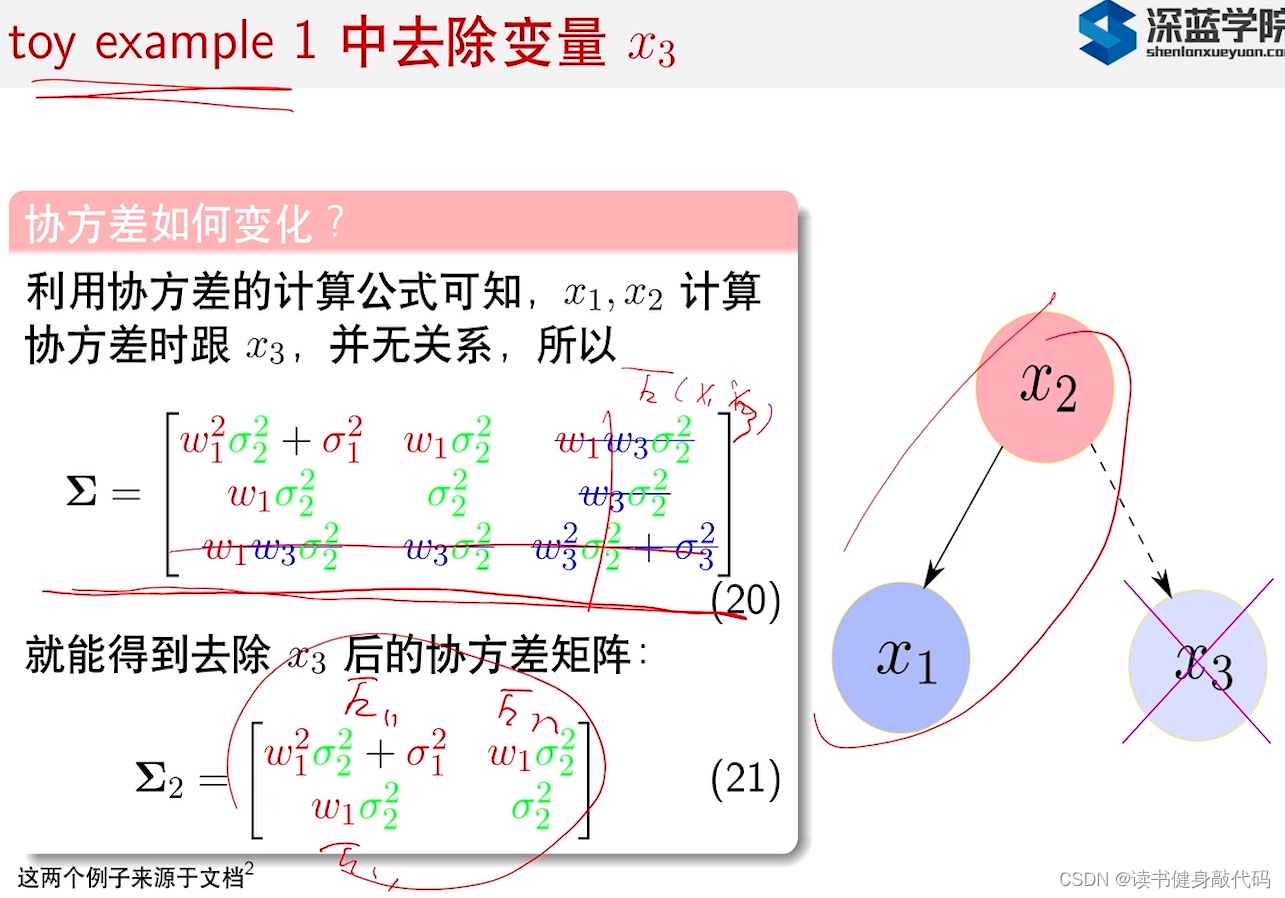
1.3 例子1的拓展
如果例子1中没有
x
3
x_3
x3,那么在
Σ
,
Σ
−
1
\Sigma, \Sigma^{-1}
Σ,Σ−1中直接把有关
x
3
x_3
x3的变量置为0即可:
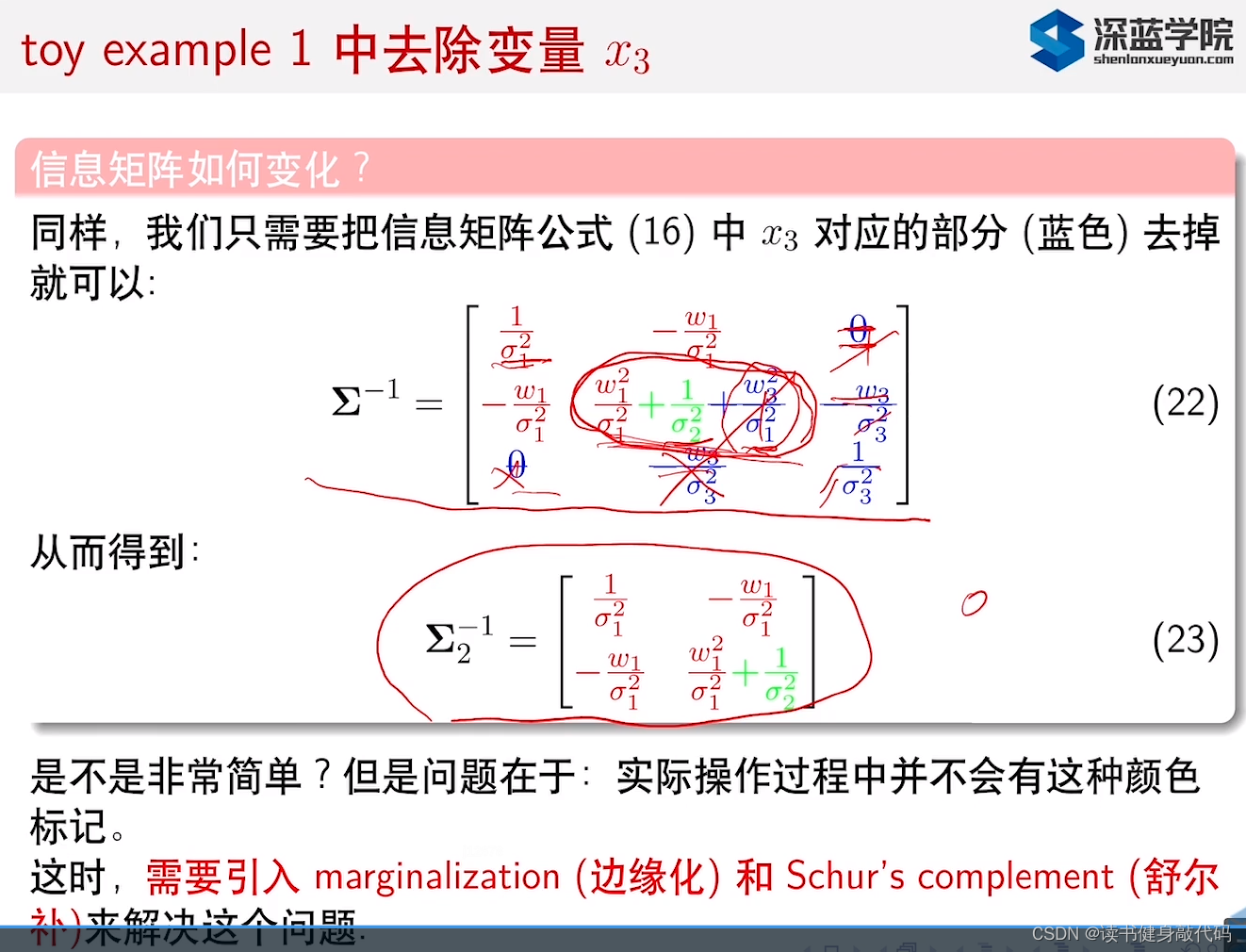
但是实际中我们不知道 Σ , Σ − 1 \Sigma, \Sigma^{-1} Σ,Σ−1由哪几项构成,也就无法去掉为0的项,这时需要引入其他的方法来帮助我们找出这些项:marginalization(边缘化)和Schur’s complement(舒尔补)。
1.4协方差矩阵和信息矩阵小结
- 协方差矩阵 Σ \Sigma Σ非对角元素>0则代表对应元素正相关,信息矩阵 Σ − 1 \Sigma^{-1} Σ−1中非对角线元素<0代表两元素正相关,>0则是负相关(毕竟是求逆)。
- 协方差矩阵表示两个变量之间的关系,而信息矩阵则表示两个变量在某种特定条件下的关系。
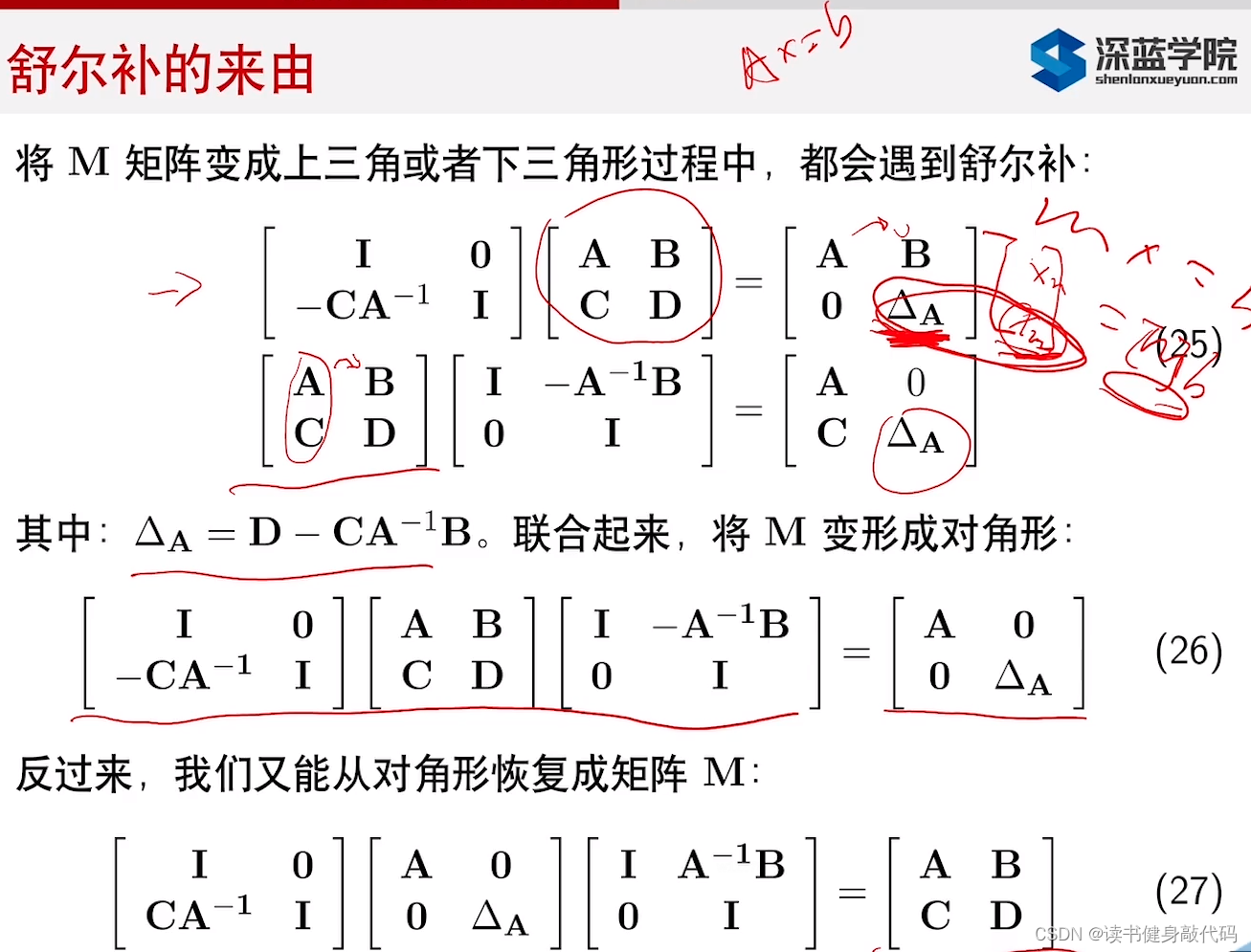
2. 舒尔补应用
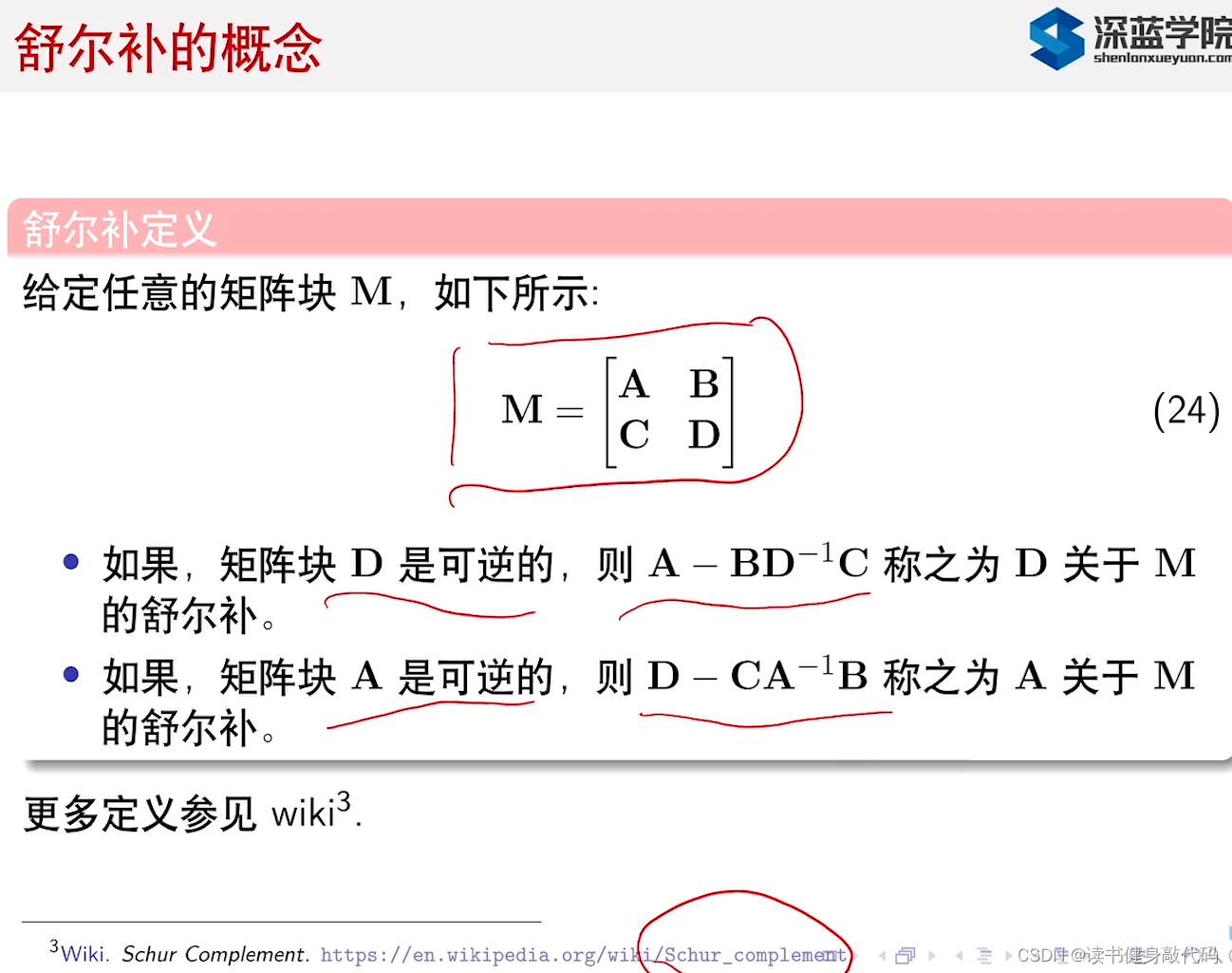
将矩阵M变为上三角或者下三角矩阵,得到的
Δ
A
\Delta A
ΔA叫做舒尔补
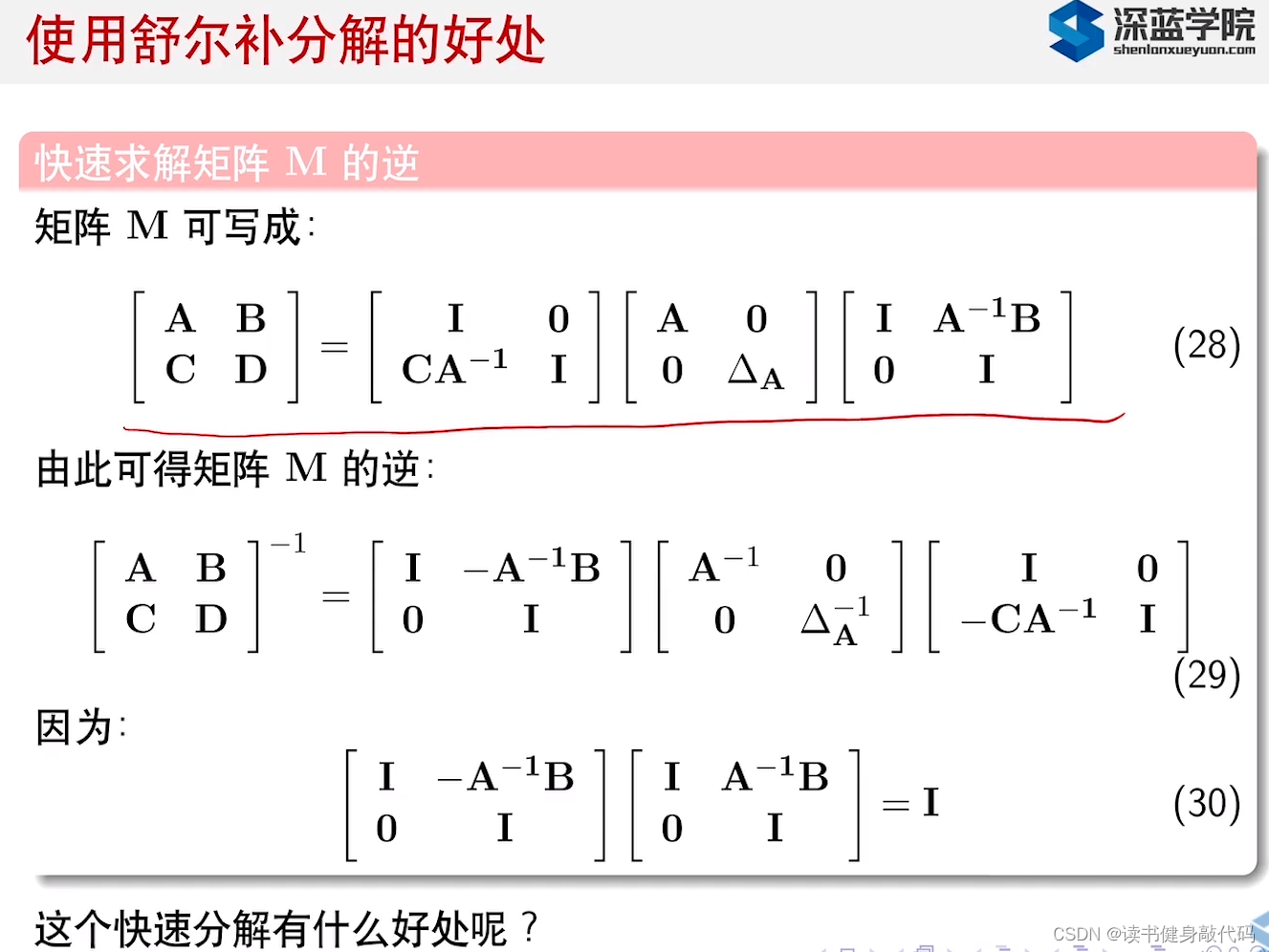
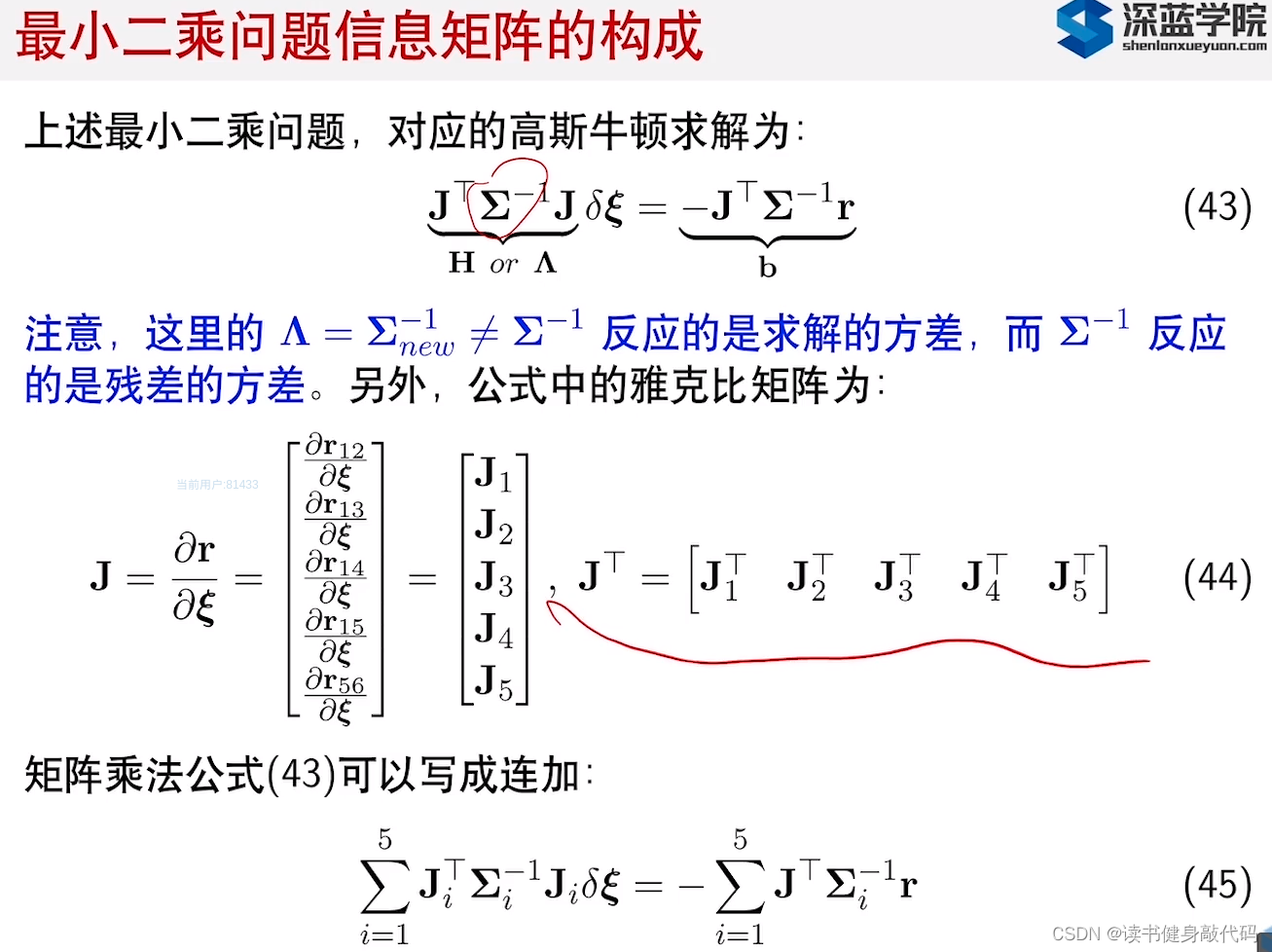
舒尔消元便于求解方程 H Δ x = b H\Delta x=b HΔx=b, H = J T J H=J^TJ H=JTJ是稀疏的,把路标点信息边缘化到相机位姿中,求解出相机位姿后再求解位姿。
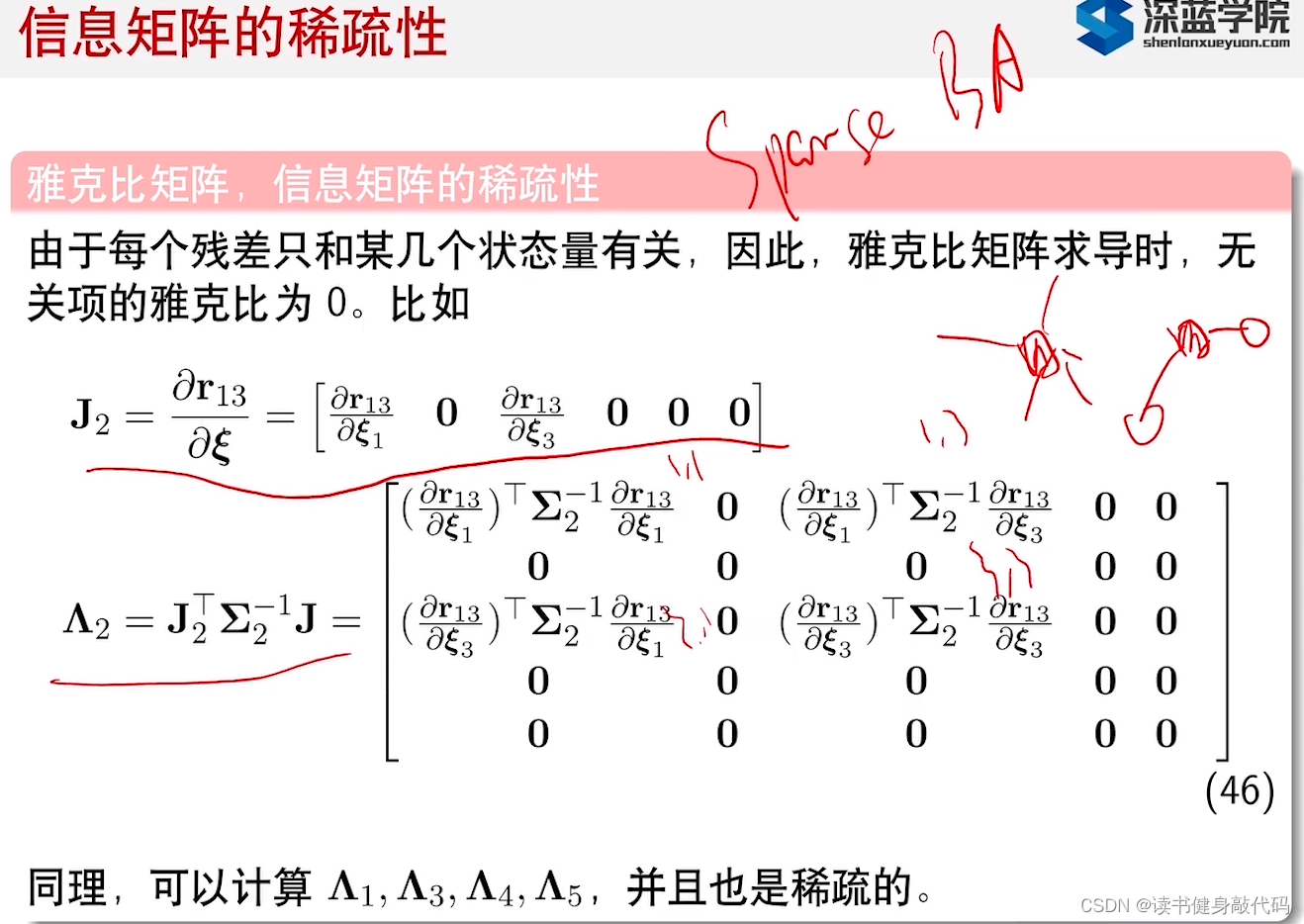
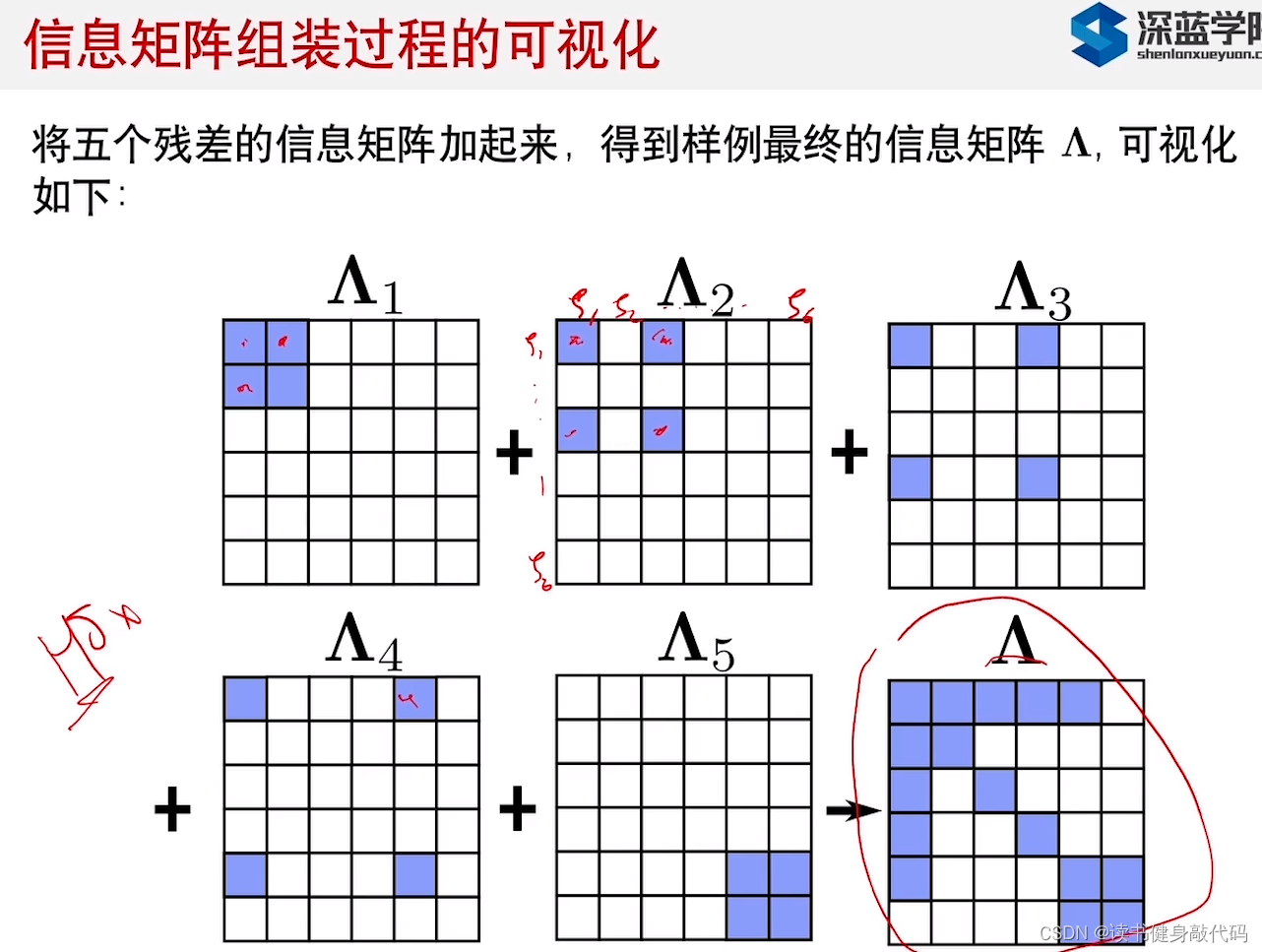
这部分内容可以复习14讲后端1中关于稀疏化和边缘化的部分,看完例子之后再来理解这里的内容会比较容易。
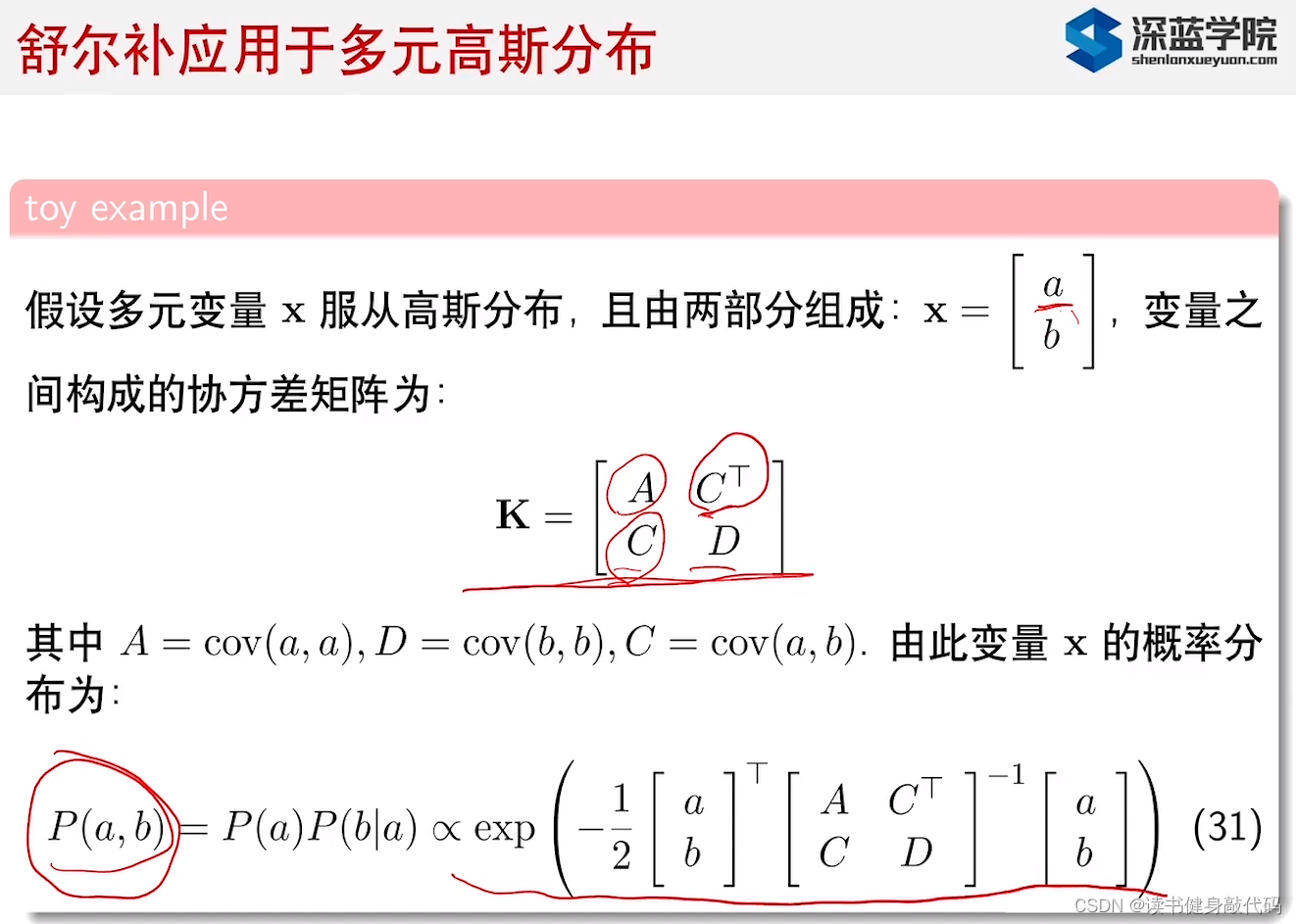
如果是VSlam,下面的
x
x
x可以看做是由相机位姿(a,se(3))和路标点(b,
R
3
R^3
R3)组成,K就是
J
T
J
J^TJ
JTJ(可能VIO会有些差别)
2.1 边缘概率P(a), 条件概率P(a|b)的协方差矩阵
(31)严格来说应该减去
[
a
,
b
]
T
[a, b]^T
[a,b]T的期望,但是这里不怎么关注期望
将式(29)带入得,可以整理为只与a,b有关的部分,就分解为边缘概率和条件概率:
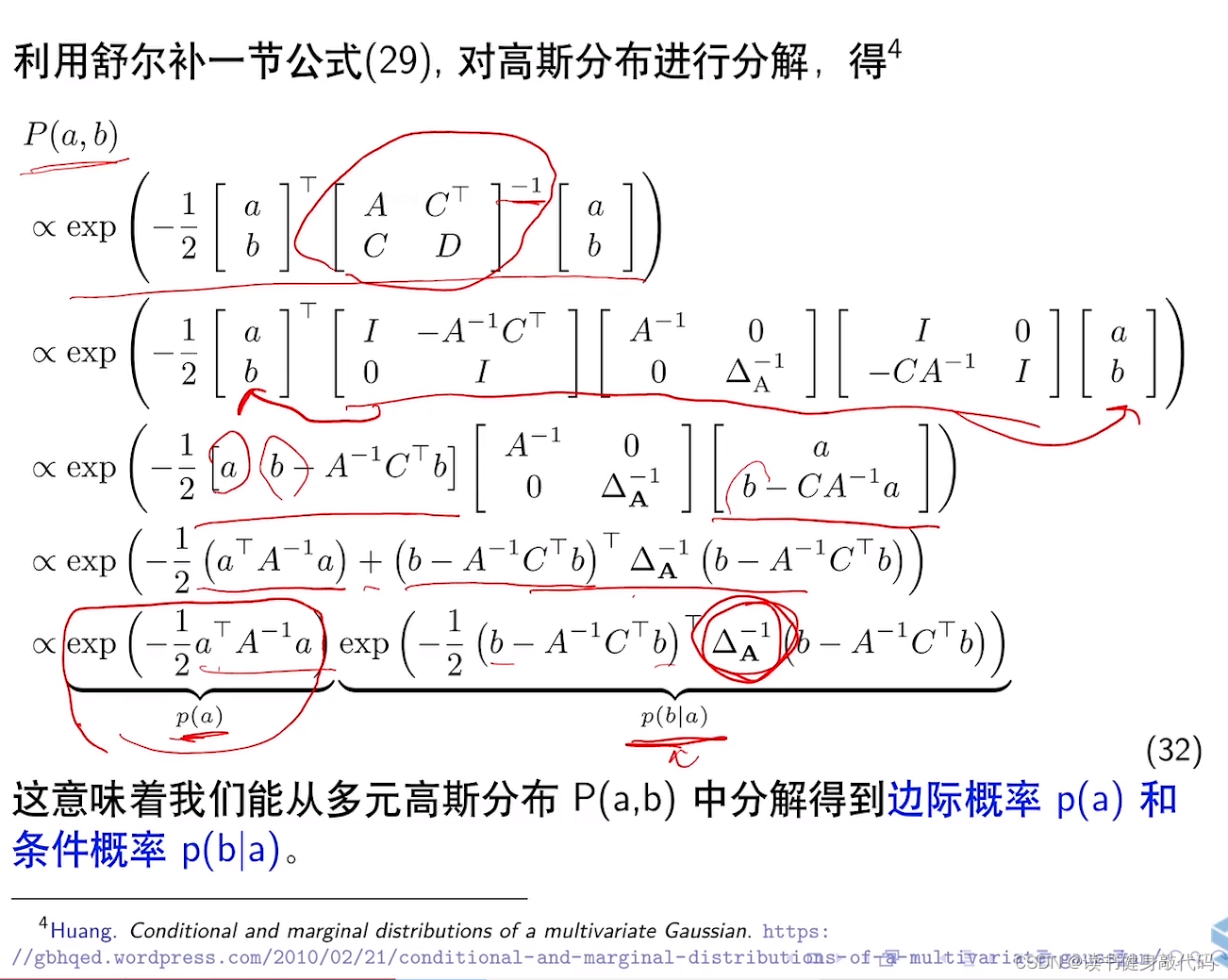
(33)是全概公式
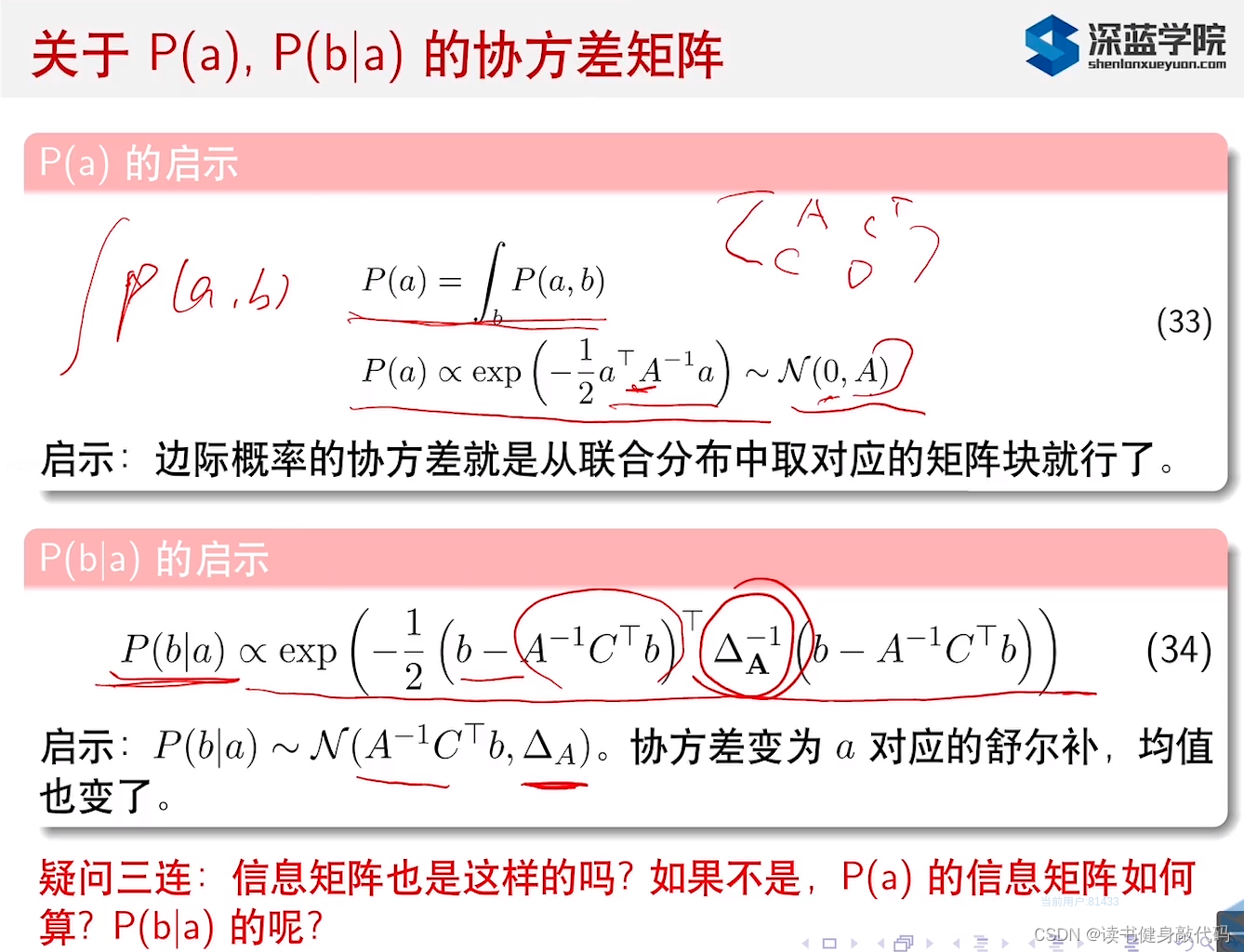
但是实际上信息矩阵的左上角的块不一定好求,因为 A − 1 A^{-1} A−1不一定好求,左上角的块不仅仅跟 A − 1 A^{-1} A−1有关,见(36)
边缘概率实际中是相机位姿的概率,条件概率是在相机位姿的条件下看到的路标点的概率。
2.2 P(a), P(a|b)的信息矩阵
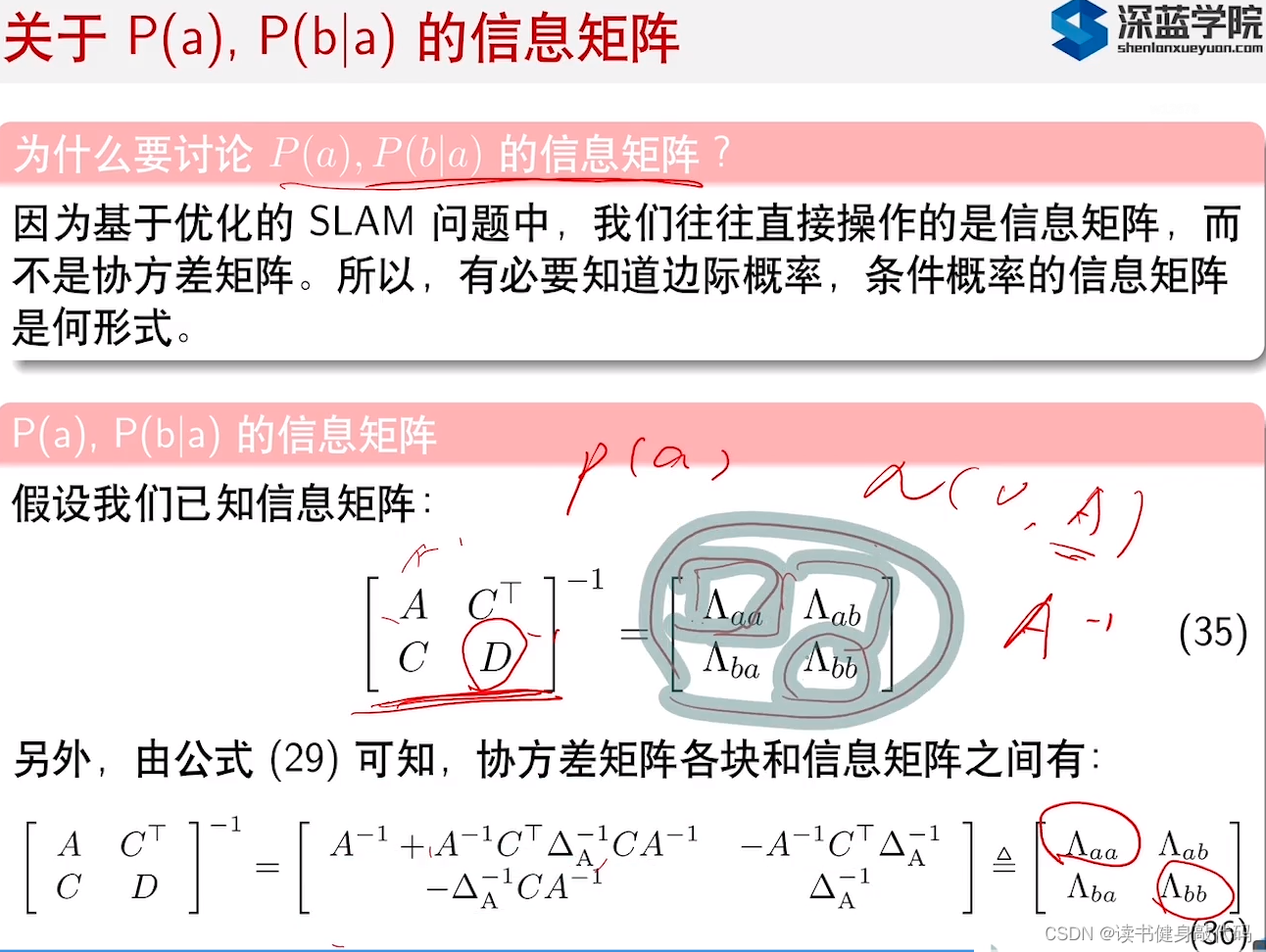
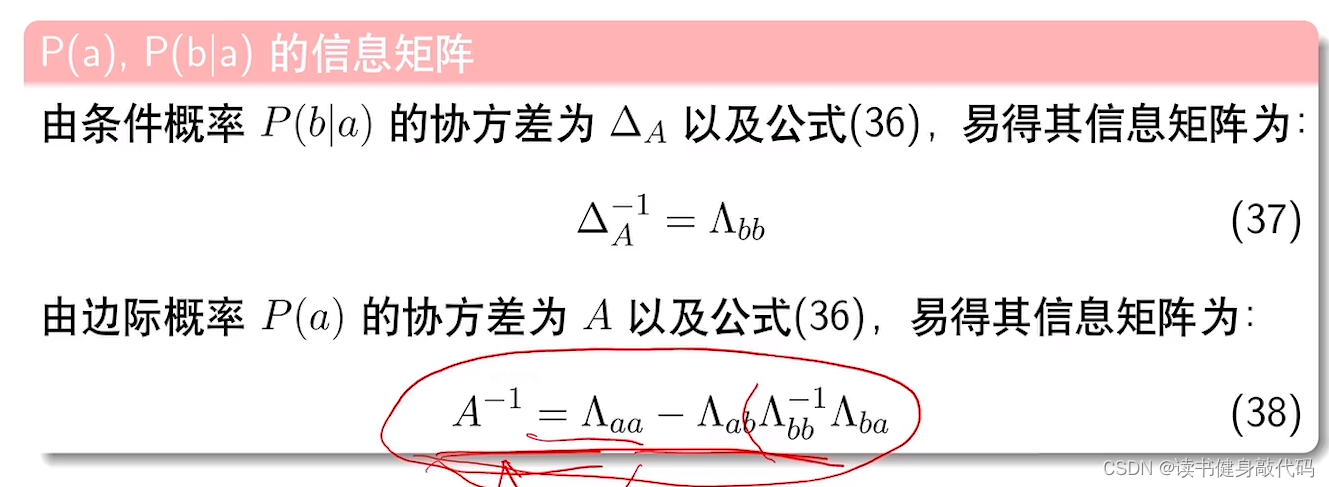
已知信息矩阵 Σ − 1 \Sigma^{-1} Σ−1,可以看出 Λ a a \Lambda_{aa} Λaa不只是和 A − 1 A^{-1} A−1有关,但是边缘分布的协方差就是 A \bm{A} A, P ( a ) P(a) P(a)的信息矩阵就是 A − 1 \bm{A}^{-1} A−1,给了信息矩阵 Σ − 1 \Sigma^{-1} Σ−1,如何求出 A − 1 \bm{A}^{-1} A−1呢?(为什么要求呢?)
高斯消元可得
A
−
1
\bm{A}^{-1}
A−1
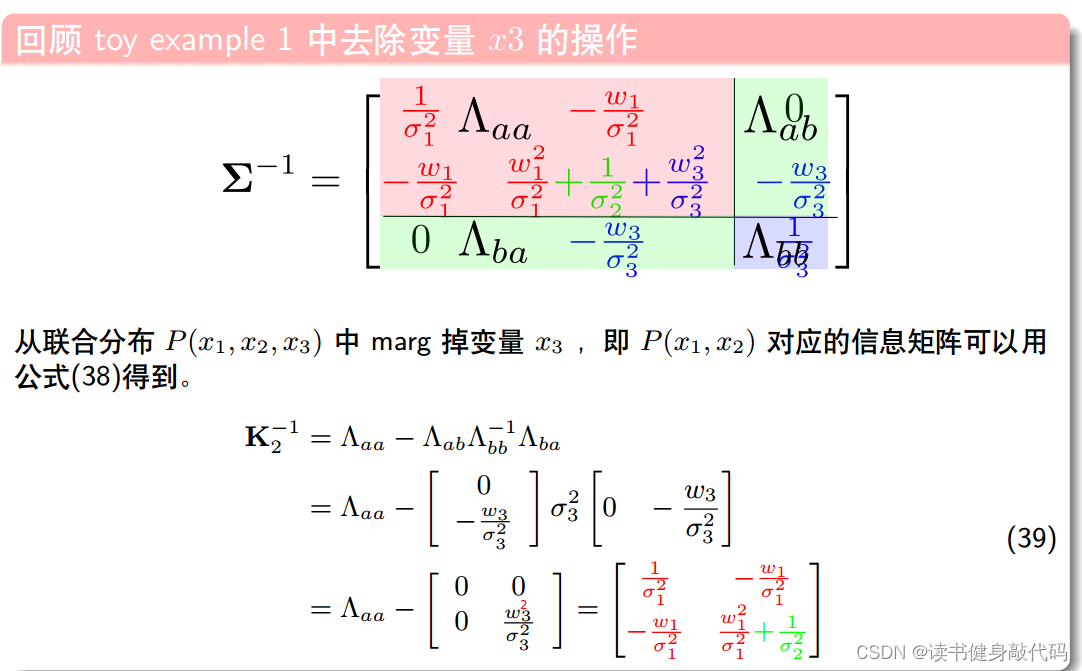
对应到1.3的例子,去掉
x
3
x_3
x3时,求
P
(
x
1
,
x
2
)
P(x_1, x_2)
P(x1,x2)的信息矩阵时,直接套用(38)如下式(39),
K
2
−
1
K_2^{-1}
K2−1即为
P
(
x
1
,
x
2
)
P(x_1, x_2)
P(x1,x2)的信息矩阵
2.1 总结
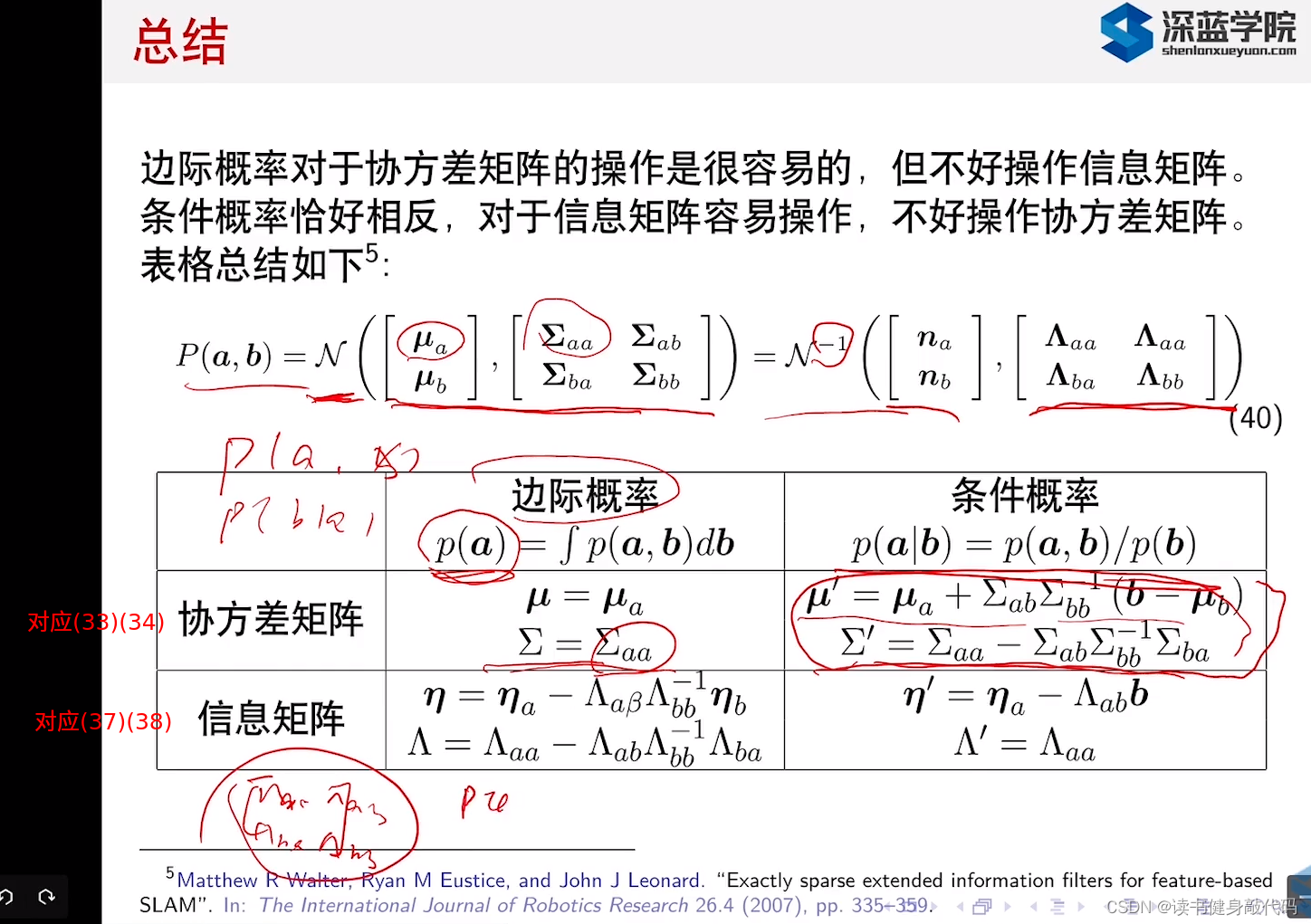
信息矩阵本身就能表示出条件概率,如1.1的式(16)中的,信息矩阵 Σ i j = 0 \Sigma_{ij}=0 Σij=0代表i, j关于其他变量条件独立,描述的本身就是条件概率。
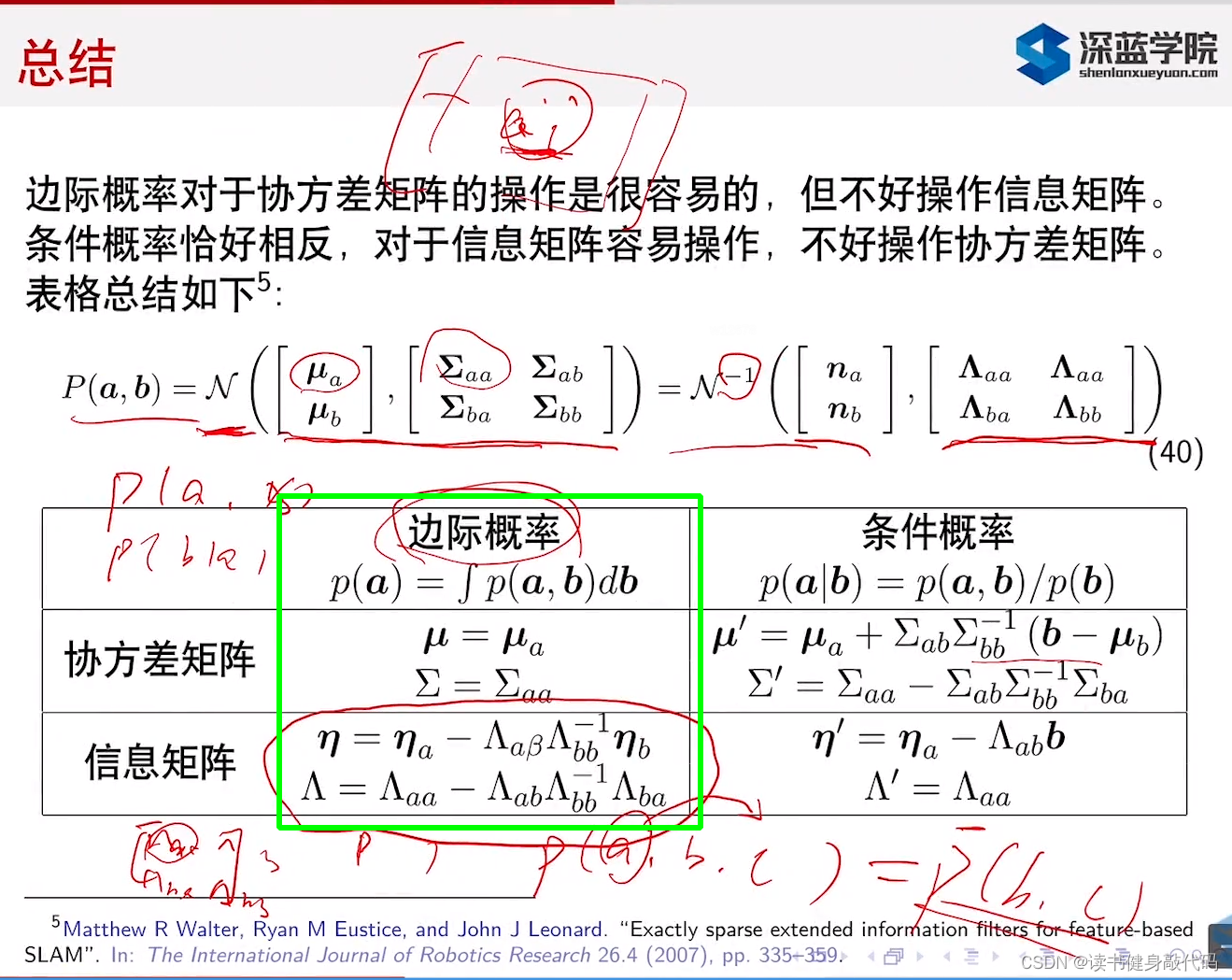
总结: 在SLAM中,舒尔补主要用在滑动窗口算法中,将旧的信息丢掉,我们是希望通过舒尔补的形式将一部分信息给marg掉,且通常是操作边缘概率的信息矩阵。
3. 滑动窗口算法