1. 安装ros-noetic
2. 安装Mavros包
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras
3. GeographicLib
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
这里可以使用代理 :wget -e https_proxy=
sudo ./install_geographiclib_datasets.sh
建图模块依赖项安装
安装rtabmap:
sudo apt-get install ros-noetic-rtabmap*
安装Octomap:
sudo apt-get install ros-noetic-octomap-*
规划模块依赖项安装
安装非线性优化工具箱 NLopt,安装方法如下
git clone https://github.com/stevengj/nlopt.git
cd nlopt
mkdir build
cd build
cmake ..
make
sudo make install
Prometheus项目下载(V1.1)
git clone -b v1.1 https://gitee.com/amovlab/Prometheus.git
cd Prometheus
git branch
PX4编译环境配置及固件代码安装(对应上面的V1.1)
sudo apt-get update
sudo apt-get install libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev
git clone -b Prometheus_PX4_1.11.1 https://gitee.com/amovlab/prometheus_px4.git
cd prometheus_px4/
git branch
git submodule update --init --recursive
pip3 install --user toml empy jinja2 packaging
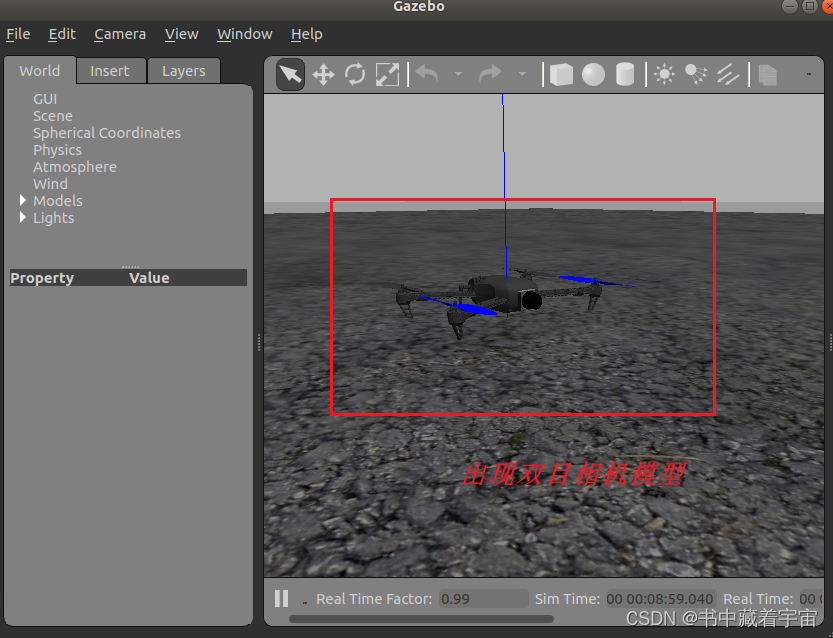
make amovlab_sitl_default gazebo
cd Tools/setup
source ./ubuntu.sh
仿真用插件安装
安装3Dlidar插件
sudo apt-get install ros-noetic-velodyne-gazebo-plugins
安装octomap在rviz中的插件
sudo apt-get install ros-noetic-octomap-rviz-plugins
安装Turtlebot3 仿真插件
sudo apt-get install ros-noetic-turtlebot3-*
Gazebo模型库下载
cd ~/.gazebo/
mkdir -p models
cd ~/.gazebo/models/
git clone https://gitee.com/potato77/gazebo_models
Prometheus项目编译
cd Prometheus
sudo chmod 777 ./compile_all.sh
./compile_all.sh
环境变量配置
source ${your prometheus path}/Prometheus/devel/setup.bash
export GAZEBO_PLUGIN_PATH=$GAZEBO_PLUGIN_PATH:${your prometheus path}/Prometheus/devel/lib
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:${your prometheus path}/Prometheus/Simulator/gazebo_simulator/models
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:${your prometheus path}/Prometheus/Simulator/gazebo_simulator/amov_models
source ${your px4 path}/prometheus_px4/Tools/setup_gazebo.bash ${your px4 path}/prometheus_px4 ${your px4 path}/prometheus_px4/build/amovlab_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:${your px4 path}/prometheus_px4
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:${your px4 path}/prometheus_px4/Tools/sitl_gazebo