待做:
- 习题整理
- 相关文献【新的综述】等
P283
文章目录
- 11.2 词袋 模型
- 11.3.2 Code: 创建字典
- 11.4.2 Code: 相似度 计算
- 训练 自己的字典 报错
- 习题
- √ 题1
- √ 题2
- 题3 DBoW3库
- 题4
- 题5
基于 词袋 的外观式 回环检测
SLAM主体(前端后端): 估计相机运动
前端: 提供特征点的提取 和 轨迹、地图的初值。
后端: 对所有这些数据进行优化。
视觉里程计 仅考虑相邻时间上 的 关键帧。
累积误差
全局一致 的 轨迹和地图
回环检测的关键: 如何有效地 检测出 相机经过同一个地方 这件事。
位姿图 质点 弹簧系统。提高了系统稳定性。
回环边: 把带有累计误差的边 “拉” 到了正确的位置。
估计的轨迹和地图 在长时间下 的正确性。
利用回环检测 进行 重定位。
视觉里程计: 仅有前端 和 局部后端的系统
SLAM: 带有回环检测和全局后端的系统
1、对任意两幅图像都做一遍特征匹配
- 不是所有图像都有回环
- 对于 N 对可能的回环, 要检测 C 2 N C_2^N C2N 次,复杂度为 O ( N 2 ) O(N^2) O(N2)
- 无法实时
2、随机抽取历史数据进行回环检测
- 检测效率不高
3、基于 外观 ✔📌
4、室外 GPS
如何 计算图像间的相似性
不选择 两幅图像相减
s
(
A
,
B
)
=
∣
∣
A
−
B
∣
∣
s(\bm{A, B}) = ||\bm{A-B}||
s(A,B)=∣∣A−B∣∣ 比较相似性 的原因:
1、像素灰度受环境光照和相机曝光的影响
2、相机视角变化,会使得像素在图像中发生位移,造成大的差异值
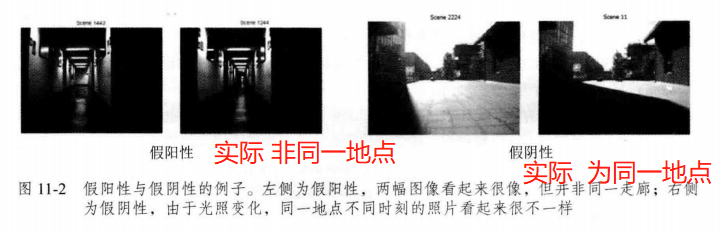
感知偏差(Perceptual Aliasing) 假阳性(False Positive)
感知变异(Perceptual Variability) 假阴性 (False Negative)
准确率:Precision =
T
P
T
P
+
F
P
\frac{TP}{TP+FP}
TP+FPTP 判为正的正样本数/ 判为正的样本数
召回率:Recall =
T
P
T
P
+
F
N
\frac{TP}{TP+FN}
TP+FNTP 判为正的正样本数/ 全部正样本数
准确率: 算法提取的所有回环中 确实是 真实回环 的概率。
召回率: 在所有真实回环中 被正确检测出来的概率。
A 在 准确率 较高时 还有很好的召回率, B在 70% 召回率 的情况下还能保证 较好的准确率。
SLAM : 准确率 要求更高
- 检测结果是 而实际不是 【假阳性】 添加错误的边有可能 导致 整个建图失效
召回率 低些 ——> 部分回环 没被检测到 ——> 累积误差 影响建图
- 一两次 回环即可完全消除。
特征匹配: 费时、光照变化会导致特征描述不稳定。
11.2 词袋 模型
Bag-of-Words(Bow) : “图像上有哪几种特征” 来描述一幅图像。
是否出现
强调的是 Words 的有无, 无关顺序。
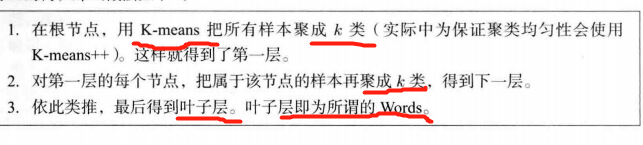
字典生成 聚类
K-means
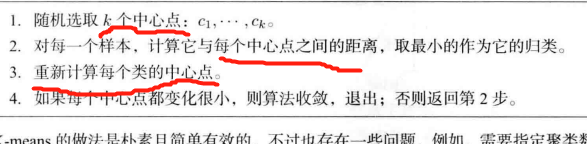
把已经提取的大量特征点 聚类成 一个含有
k
k
k 个单词的字典。
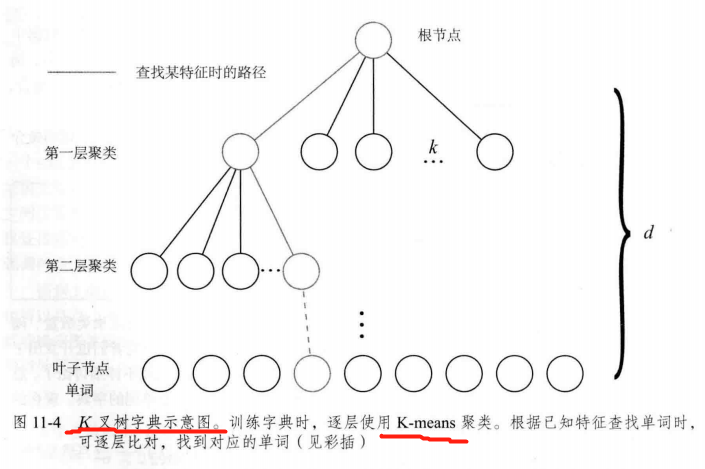
如何 根据图像中某个特征点查找字典中相应的单词
11.3.2 Code: 创建字典
ORB 特征描述
- ORB(Oriented FAST and Rotated BRIEF)特征
对10张 目标图像 提取 ORB特征 并存放至 vector 容器中,然后调用 DBoW3的字典生成接口。

————————配置环境: 开始
1、下载 DBow3
git clone https://github.com/rmsalinas/DBow3.git
2、进入 文件夹,并打开命令行窗口
3、按照 cmake 流程进行编译安装
mkdir build && cd build
cmake ..
make
sudo make install
OpenCV版本查看
python3 -c "import cv2; print(cv2.__version__)"
4.2.0
查看绝对路径
报错:


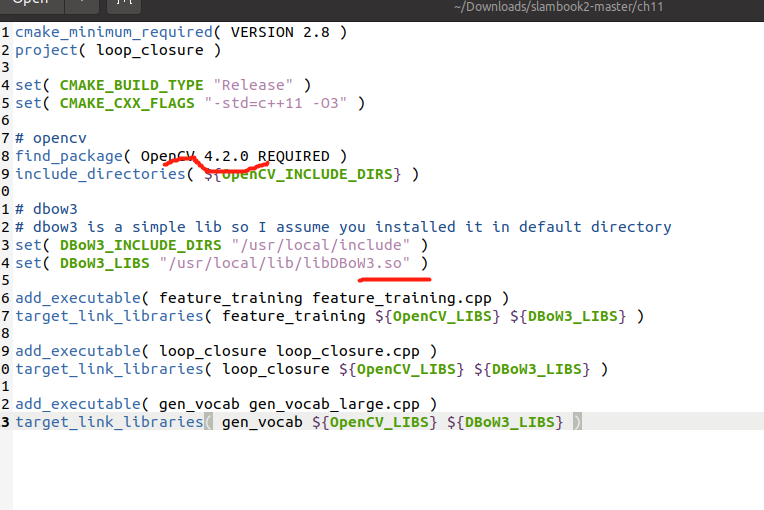
CMakeLists.txt修改
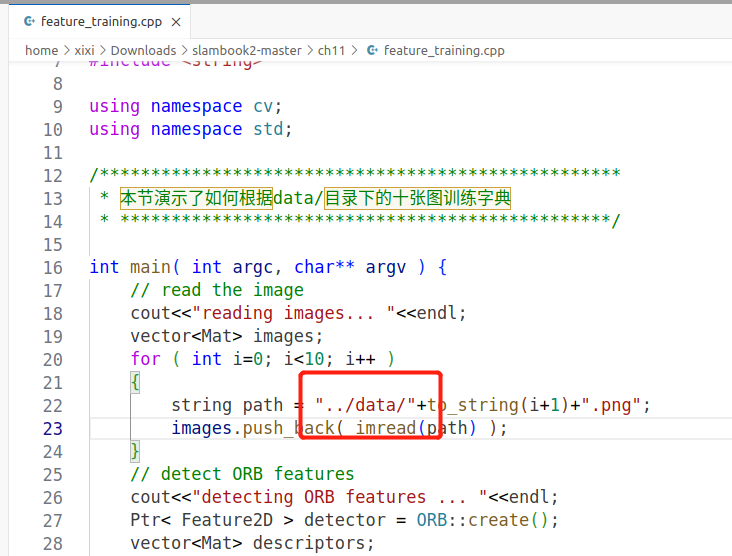
feature_training.cpp修改
这里顺便也改了。。
修改后 务必记得 cmake 一遍
cd build
cmake ..
make
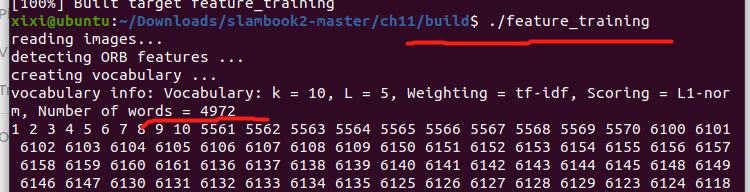
./feature_training
————————配置环境: 结束
feature_training.cpp
#include "DBoW3/DBoW3.h"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <iostream>
#include <vector>
#include <string>
using namespace cv;
using namespace std;
/***************************************************
* 本节演示了如何根据data/目录下的十张图训练字典
* ************************************************/
int main( int argc, char** argv ) {
// read the image
cout<<"reading images... "<<endl;
vector<Mat> images;
for ( int i=0; i<10; i++ )
{
string path = "../data/"+to_string(i+1)+".png";
images.push_back( imread(path) );
}
// detect ORB features
cout<<"detecting ORB features ... "<<endl;
Ptr< Feature2D > detector = ORB::create();
vector<Mat> descriptors;
for ( Mat& image:images )
{
vector<KeyPoint> keypoints;
Mat descriptor;
detector->detectAndCompute( image, Mat(), keypoints, descriptor );
descriptors.push_back( descriptor );
}
// create vocabulary
cout<<"creating vocabulary ... "<<endl;
DBoW3::Vocabulary vocab;
vocab.create( descriptors );
cout<<"vocabulary info: "<<vocab<<endl;
vocab.save( "vocabulary.yml.gz" );
cout<<"done"<<endl;
return 0;
}
CMakeLists.txt
cmake_minimum_required( VERSION 2.8 )
project( loop_closure )
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# opencv
find_package( OpenCV 4.2.0 REQUIRED )
include_directories( ${OpenCV_INCLUDE_DIRS} )
# dbow3
# dbow3 is a simple lib so I assume you installed it in default directory
set( DBoW3_INCLUDE_DIRS "/usr/local/include" )
set( DBoW3_LIBS "/usr/local/lib/libDBoW3.so" )
add_executable( feature_training feature_training.cpp )
target_link_libraries( feature_training ${OpenCV_LIBS} ${DBoW3_LIBS} )
add_executable( loop_closure loop_closure.cpp )
target_link_libraries( loop_closure ${OpenCV_LIBS} ${DBoW3_LIBS} )
add_executable( gen_vocab gen_vocab_large.cpp )
target_link_libraries( gen_vocab ${OpenCV_LIBS} ${DBoW3_LIBS} )
11.4.2 Code: 相似度 计算
TF-IDF (Term Frequency-Inverse Document Frequency)
频率-逆文档频率

某单词在字典中 出现的频率越低,分类图像时 区分度越高。



使用上节的字典生成词袋 并 比较差异
要改动的地方: 之前的data路径要是没改记得改
要是改了要 cmake 一遍
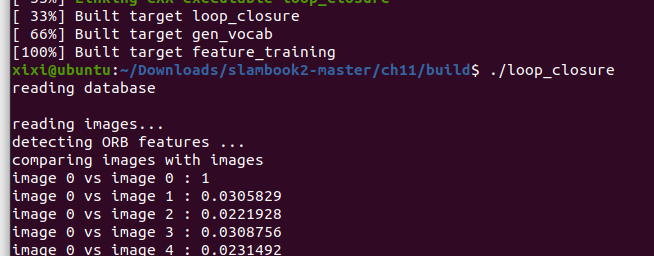
./loop_closure
loop_closure.cpp
#include "DBoW3/DBoW3.h"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <iostream>
#include <vector>
#include <string>
using namespace cv;
using namespace std;
/***************************************************
* 本节演示了如何根据前面训练的字典计算相似性评分
* ************************************************/
int main(int argc, char **argv) {
// read the images and database
cout << "reading database" << endl;
DBoW3::Vocabulary vocab("./vocabulary.yml.gz");
// DBoW3::Vocabulary vocab("./vocab_larger.yml.gz"); // use large vocab if you want:
if (vocab.empty()) {
cerr << "Vocabulary does not exist." << endl;
return 1;
}
cout << "reading images... " << endl;
vector<Mat> images;
for (int i = 0; i < 10; i++) {
string path = "../data/" + to_string(i + 1) + ".png";
images.push_back(imread(path));
}
// NOTE: in this case we are comparing images with a vocabulary generated by themselves, this may lead to overfit.
// detect ORB features
cout << "detecting ORB features ... " << endl;
Ptr<Feature2D> detector = ORB::create();
vector<Mat> descriptors;
for (Mat &image:images) {
vector<KeyPoint> keypoints;
Mat descriptor;
detector->detectAndCompute(image, Mat(), keypoints, descriptor);
descriptors.push_back(descriptor);
}
// we can compare the images directly or we can compare one image to a database
// images :
cout << "comparing images with images " << endl;
for (int i = 0; i < images.size(); i++) {
DBoW3::BowVector v1;
vocab.transform(descriptors[i], v1);
for (int j = i; j < images.size(); j++) {
DBoW3::BowVector v2;
vocab.transform(descriptors[j], v2);
double score = vocab.score(v1, v2);
cout << "image " << i << " vs image " << j << " : " << score << endl;
}
cout << endl;
}
// or with database
cout << "comparing images with database " << endl;
DBoW3::Database db(vocab, false, 0);
for (int i = 0; i < descriptors.size(); i++)
db.add(descriptors[i]);
cout << "database info: " << db << endl;
for (int i = 0; i < descriptors.size(); i++) {
DBoW3::QueryResults ret;
db.query(descriptors[i], ret, 4); // max result=4
cout << "searching for image " << i << " returns " << ret << endl << endl;
}
cout << "done." << endl;
}
11.5.1
修改这里 并重新 cmake 即可
./loop_closure
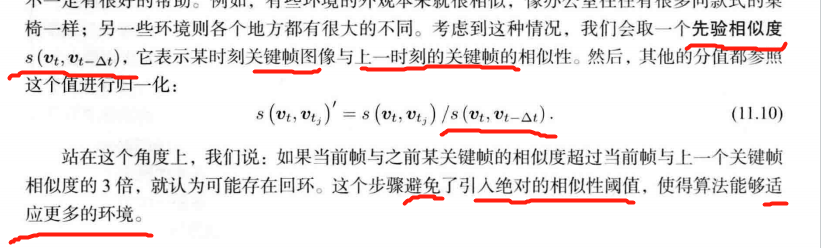
把相近的回环聚成 一类。比如 第n, n-2, n-3帧
检测之后的验证:
1、回环 缓存【多次检测到相似✔】: 一段时间中一直检测到的回环,才是正确的回环
2、回环检测到的帧进行特征匹配【相应 相机位姿也匹配✔】,估计各自的相机运动,检查位姿是否出入很大。
分类
图像相似性
训练 自己的字典 报错

参考这里
1、
gen_vocab_large.cpp
#include "DBoW3/DBoW3.h"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <iostream>
#include <vector>
#include <string>
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
string dataset_dir = argv[1];
ifstream fin ( dataset_dir+"/associate.txt" );
if ( !fin )
{
cout<<"please generate the associate file called associate.txt!"<<endl;
return 1;
}
vector<string> rgb_files, depth_files;
vector<double> rgb_times, depth_times;
while ( !fin.eof() )
{
string rgb_time, rgb_file, depth_time, depth_file;
fin>>rgb_time>>rgb_file>>depth_time>>depth_file;
rgb_times.push_back ( atof ( rgb_time.c_str() ) );
depth_times.push_back ( atof ( depth_time.c_str() ) );
rgb_files.push_back ( dataset_dir+"/"+rgb_file );
depth_files.push_back ( dataset_dir+"/"+depth_file );
if ( fin.good() == false )
break;
}
fin.close();
cout<<"generating features ... "<<endl;
vector<Mat> descriptors;
Ptr< Feature2D > detector = ORB::create();
int index = 1;
for ( string rgb_file:rgb_files )
{
Mat image = imread(rgb_file);
vector<KeyPoint> keypoints;
Mat descriptor;
detector->detectAndCompute( image, Mat(), keypoints, descriptor );
descriptors.push_back( descriptor );
cout<<"extracting features from image " << index++ <<endl;
}
cout<<"extract total "<<descriptors.size()*500<<" features."<<endl;
// create vocabulary
cout<<"creating vocabulary, please wait ... "<<endl;
DBoW3::Vocabulary vocab;
vocab.create( descriptors );
cout<<"vocabulary info: "<<vocab<<endl;
vocab.save( "vocab_larger.yml.gz" );
cout<<"done"<<endl;
return 0;
}
习题
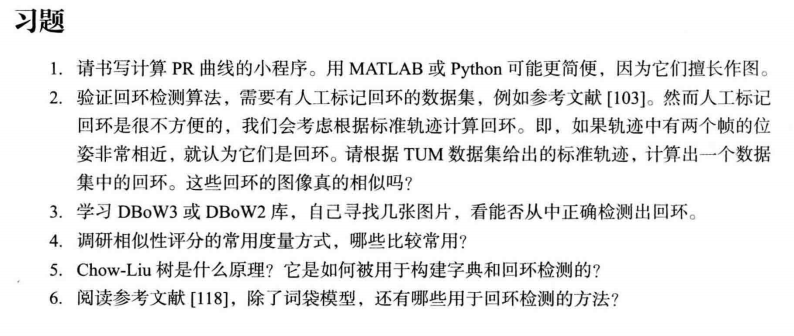
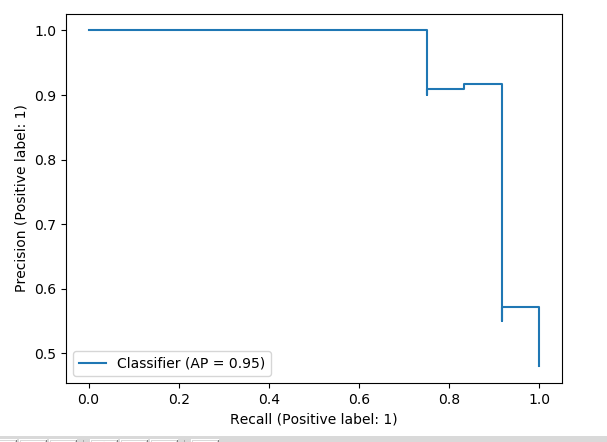
√ 题1
sklearn 分类 评估指标
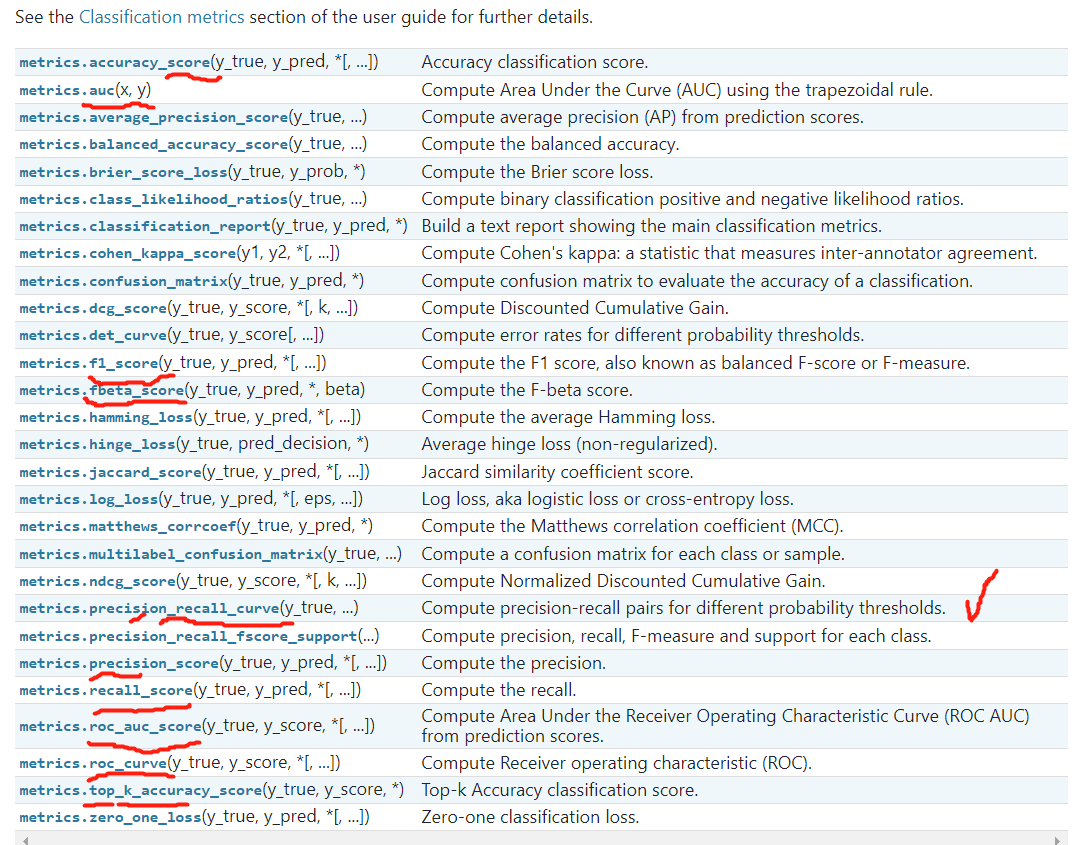
PR曲线
pip install -U scikit-learn
sklearn.metrics.PrecisionRecallDisplay
test.py
import matplotlib.pyplot as plt
from sklearn.datasets import make_classification
from sklearn.metrics import PrecisionRecallDisplay
from sklearn.model_selection import train_test_split
from sklearn.linear_model import LogisticRegression
X, y = make_classification(random_state=0)
X_train, X_test, y_train, y_test = train_test_split(
X, y, random_state=0)
clf = LogisticRegression() # 分类模型
clf.fit(X_train, y_train)
y_pred = clf.predict_proba(X_test)[:, 1] # 得到预测值
# 绘制 PR 曲线 需要预测结果 及 label
PrecisionRecallDisplay.from_predictions(
y_test, y_pred)
plt.show()
python3 test.py
√ 题2
2、验证回环检测算法,需要有人工标记回环的数据集。然而人工标记回环是很不方便的,我们会考虑根据标准轨迹计算回环。即,如果轨迹中有两个帧的位姿非常相近,就认为它们是回环。请根据TUM数据集给出的标准轨迹,计算出一个数据集中的回环。这些回环的图像真的相似吗?
解答链接

FAB-MAP: Probabilistic Localization and Mapping in the Space of Appearance
题3 DBoW3库
DBoW3是DBow2库的改进版本,DBow2库是一个开源c++库,用于索引图像并将其转换为词袋表示。它实现了一个层次树,用于在图像特征空间中逼近最近邻,并创建视觉词汇表。DBoW3还实现了一个图像数据库,其中包含反向和直接文件,用于索引图像,并支持快速查询和特性比较。
github链接
git clone https://github.com/rmsalinas/DBoW3.git
可参考
————————————————
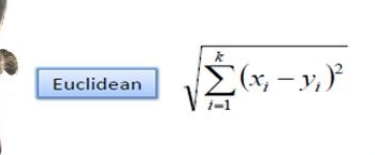
题4
4、
1、欧几里得距离(Eucledian Distance)
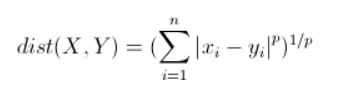
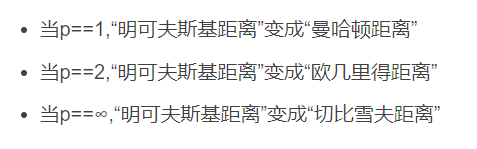
2、曼哈顿距离(Manhattan Distance)
3、明可夫斯基距离(Minkowski distance)
4、(余弦相似度)Cosine Similarity 方向
5、Jaccard Similarity
六、皮尔森相关系数(Pearson Correlation Coefficient)

——————————————————
题5
5、Chow-Liu树:
链接1: https://web.stanford.edu/class/ee376a/files/2017-18/chow-liu.pdf
链接2【详细】:https://people.kth.se/~tjtkoski/chowliulect.pdf
Chow-Liu树是对概率分布的“最佳可能”树形信念网络逼近,使得所有边都远离根。利用真实分布与Chow-Liu树定义的分布之间的Kullback-Leibler距离来测量近似的质量。当我们从数据中学习时,“真实”分布是由观测值的频率定义的。Chow和Liu(1968)表明,最优树可以作为所有变量上的最大权值生成树,其中每条边的权值作为由边连接的变量之间的互信息给出。
Chow-Liu树可以构造如下:
1、为每一对
(
X
i
,
X
j
)
(X_i, X_j)
(Xi,Xj) 计算互信息
M
I
(
X
i
,
X
j
)
MI(X_i, X_j)
MI(Xi,Xj)。
2、考虑完全
M
I
MI
MI加权图, 无向。
3、为完全
M
I
MI
MI加权图构建最大权值生成树。
4、通过选择任何变量作为根,并将链接的方向设置为从它向外,来指导生成的树。
Chow-Liu树代码实现Python