参考文章1:http://t.csdn.cn/h8TBy
参考文章2:http://t.csdn.cn/6nmsT
参考网址3:opencv平场定标 - CSDN文库
平场校正一般先用FPN(Fixed Pattern Noise)固定图像噪声校正,即暗场校正;再用PRNU(Photo Response Non Uniformity)图像非均匀性响应校正,即明场校正;进行图像或者相机的校正。
平场校正就是以整帧图像的均值或者中值为目标图像,根据每个像素的特性不同,以响应增益gain为系数K和偏置offset为系数B,对每个像素进行校正,从而使得整幅图像看起来很均匀平滑,当然,为了简化计算,节省资源,也可以使用多个相邻的像素使用同一组校准参数。
一.按照算法的理论步骤
校正时,可以采用多段校正法将响应曲线分段校正,而更多的是简单暴力的两点校正法,也就是看成线性响应。首先相机对暗场进行一次曝光,得到每个像元的偏移(Offset);接下来对均匀光照条件下的灰度均匀物体进行一次成像,得到均匀场图像,最好能够使图像中所有的点都接近最大的灰度值;最后用均匀光场图像减去暗场图像,用相对标定的方法对图像增益(Gain)进行校正。
在暗场校正中,可以得到均值Vavgb,像素值Vinb;
在明场校正中,可以得到均值Vavgr,像素值Vinr;
可以得到增益响应系数K=(Vavgr-Vavgb)/(Vinr-Vinb);
偏置B=Vavgb-Vinb*K;
将n个像素的每一个像素点的K[n]和B[n]写入一个ram表中,当读取一帧图像时,对每一个像素进行校正Vout=Vin*K+B。必须首先做暗场再做明场,计算PRNU因子时要用到FPN因子的值。FPN校正时,像素值必须在1DN与127DN(可理解为灰度值)之间;PRNU校正时,像素值必须在128DN与254DN之间。
以上是针对相机或者图像偏数学算法原理的介绍。
上面这种方法感觉步骤不够具体,个人能力对于很多参数计算及过程难以理解,无法实现完整代码的撰写,有能力者希望可以指点一二。
二.利用平场定标技术校正(一组图像)
下面是我在另外一个博主这里看到的另一种方法平场定标,跟平场校正的功能比较像,这是针对一组拍摄好的图像做处理,我觉得很有启发:
平场定标(Flat-field calibration))是指通过对图像进行校正,消除由于光照不均匀或传感器噪声等因素引起的图像亮度和颜色的不均匀性。在OpenCV中,可以使用平场定标技术来校正图像。具体步骤如下:
1.收集平场图像:在相机的工作环境中,拍摄一系列完全均匀且没有目标物体的图像,这些图像被称为平场图像。
⒉.计算平场图像的平均值:将所有平场图像叠加在一起,并计算每个像素位置的平均值。这将得到一个平均平场图像。(三中用到)
3.计算平场图像的标准差:将所有平场图像与平均平场图像进行逐像素的差异计算,并计算每个像素位置的标准差。这将得到一个标准差平场图像。
4.校正图像:对于要校正的图像,将其与平均平场图像相减,并除以标准差平场图像。这将消除图像中的亮度和颜色不均匀性。
这种方法写了代码,但是最后得到的显示结果存疑,这里就不贴出来了。
三.常见的平场校正流程(两个输入图,一个输出图)
这个方法步骤是通过AI问答得到的,也具备一定的可借鉴性。
- 读取平场图像和待校正图像。(个人认为,平场图像可以用上面二中的平均平场图像。)
//个人根据现有资料理解所写,不确保正确性!
int main()
{
//读入图片路径下的所有图像文件
string imgdirpath="D:\\flatimages\\";
string imgpath = imgdirpath + "*.bmp"; // test_images
vector<String> filesVec;
//遍历文件夹,两个参数分别表示文件的路径和保存图像具体路径的Vector容器。
glob(imgpath, filesVec);
if (filesVec.size() == 0)
{
cout << "File is empty!" << endl;
return -1;
}
//初始化平场图像,利用一组亮度均匀符合要求的图像的平均图像做平场图像
Mat flatsum = Mat::zeros(height, width, CV_8UC3);
int num = 0;
for (int i = 0; i < filesVec.size(); i++)
{
//叠加所有平场图像,并求平均值图像
add(flatsum, ReadRaw10(filesVec[i].c_str()), flatsum);
num++;
}
Mat flatmean3 = flatsum / num;//得到平均平场图像
Mat inimg=imread("D:\\imgtest\\01.bmp");//读取待处理的输入图像
Mat img_flat = flatfield2(inimg, flatmean3);//平场校正,
imshow("img_flat", img_flat);
waitKey(0);- 如果没有一张符合要求的平场图像,需要利用一组图像计算平均图像用作平场图像。
- 对平场图像和待校正图像进行预处理,如图像增强、降噪等。
- 计算平场图像和待校正图像的平均值。
- 计算非均匀性模式:
- 将平场图像减去其平均值,得到平场图像的差异图像。
- 将待校正图像减去其平均值,得到待校正图像的差异图像。
- 将平场图像的差异图像除以待校正图像的差异图像,得到非均匀性模式。
- 校正待校正图像:
- 将待校正图像减去非均匀性模式,得到校正后的图像。
- 可选步骤:根据需要,进行其他的图像处理,如对比度调整、增强等。
- 输出校正后的图像。
以下是本人根据理解写的,代码下方的图像监视(VS插件,自行安装)得到的放大像素值截图(不是一一对应):
//(3)平场校正2。两个输入,一个输出,需要提前知道平场图像,用平均值
Mat flatfield2(Mat inImg,Mat flatImg)
{
Mat grayflatImg;
Mat grayinImg;
cvtColor(flatImg, grayflatImg, COLOR_BGR2GRAY);
cvtColor(inImg, grayinImg, COLOR_BGR2GRAY);
//计算非均匀性模式
Mat nonUniformityPattern = (grayflatImg - mean(grayflatImg))/ (grayinImg-mean(grayinImg));
//待校正图像减去非均匀性模式,得到校正后的图像
Mat flatcorrected1 = grayinImg - nonUniformityPattern;
//转回彩色图像
Mat flatcorrected3 = Mat::zeros(height, width, CV_8UC3);
//cvtColor(flatcorrected1, flatcorrected3, COLOR_GRAY2BGR);
cvtColor(flatcorrected1, flatcorrected3, COLOR_BayerBG2RGB);
return flatcorrected3;
}
四.较为简单的步骤(一个输入图像,一个输出图像)
还有另一种方法,使用了OpenCV库来实现平场校正:
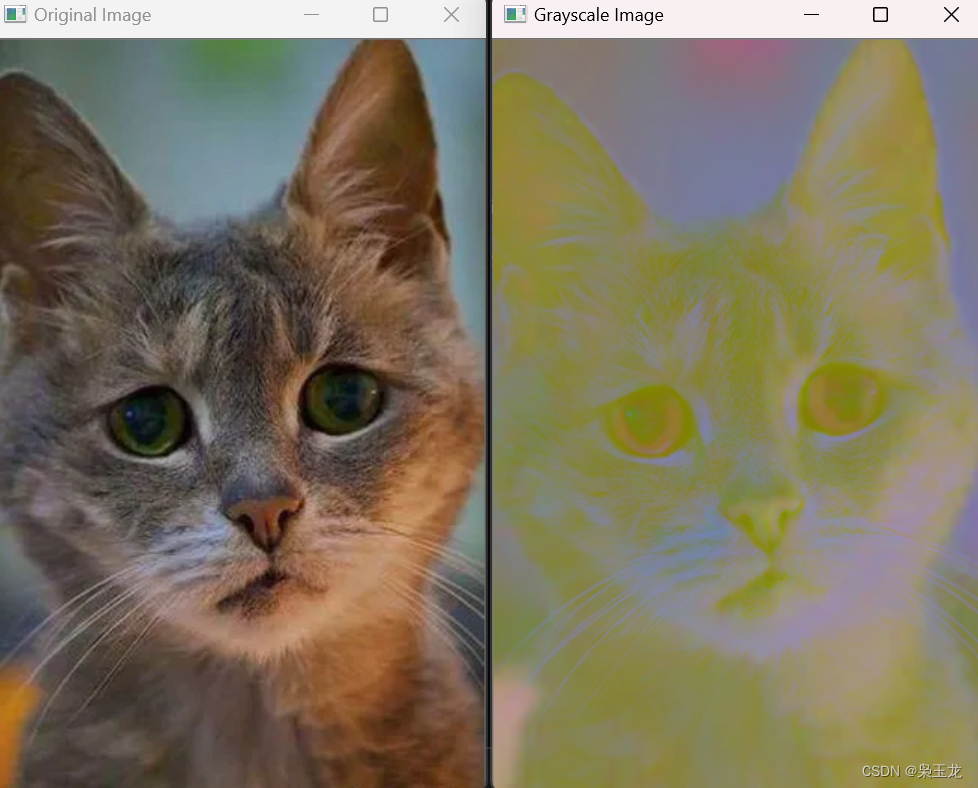
首先,将彩色图像转换为灰度图像,然后计算图像的平均值来获取亮度分布图。
接下来,将原始图像除以亮度分布图,得到校正后的图像。
最后,将校正后的图像转换回彩色图像并显示。
这种方法也写了代码,但是最后得到的显示结果也存疑,这里就不贴出来了。