图像的边缘检测
cv::Canny 是 OpenCV 中用于进行边缘检测的函数,特别是用于检测图像中的边缘。Canny 边缘检测是一种广泛使用的技术,它能够识别图像中的边缘,这些边缘通常表示对象之间的边界或图像中的显著特征
void cv::Canny(const cv::Mat& image, cv::Mat& edges, double threshold1, double threshold2, int apertureSize = 3, bool L2gradient = false);
参数说明:
image:输入图像,需要进行边缘检测的图像,通常是灰度图像。
edges:输出图像,用于存储检测到的边缘。
threshold1:第一个阈值,用于边缘检测的强度梯度。
threshold2:第二个阈值,用于连接边缘的弱边缘梯度。
apertureSize:(可选)Sobel 算子的核大小,默认为3。
L2gradient:(可选)一个布尔值,指定是否使用更精确但计算量更大的 L2 范数来计算梯度幅度,默认为false,通常使用 L1 范数。
图像边缘检测案例
#include <opencv2/opencv.hpp>
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
#include <iostream>
#include <fstream>
#include <opencv2/opencv.hpp>
int main() {
// 读取图像
cv::Mat inputImage = cv::imread("1.png", cv::IMREAD_GRAYSCALE);//先把图像改成灰色图才能进行边缘的处理
// 检查图像是否成功加载
if (inputImage.empty()) {
std::cerr << "无法加载图像" << std::endl;
return -1;
}
// 创建一个输出图像
cv::Mat edges;
// 使用Canny边缘检测
double lowThreshold = 50; // 低阈值
double highThreshold = 150; // 高阈值
int apertureSize = 3; // Sobel算子内核大小
cv::Canny(inputImage, edges, lowThreshold, highThreshold, apertureSize);//
// 显示原始图像和边缘检测结果
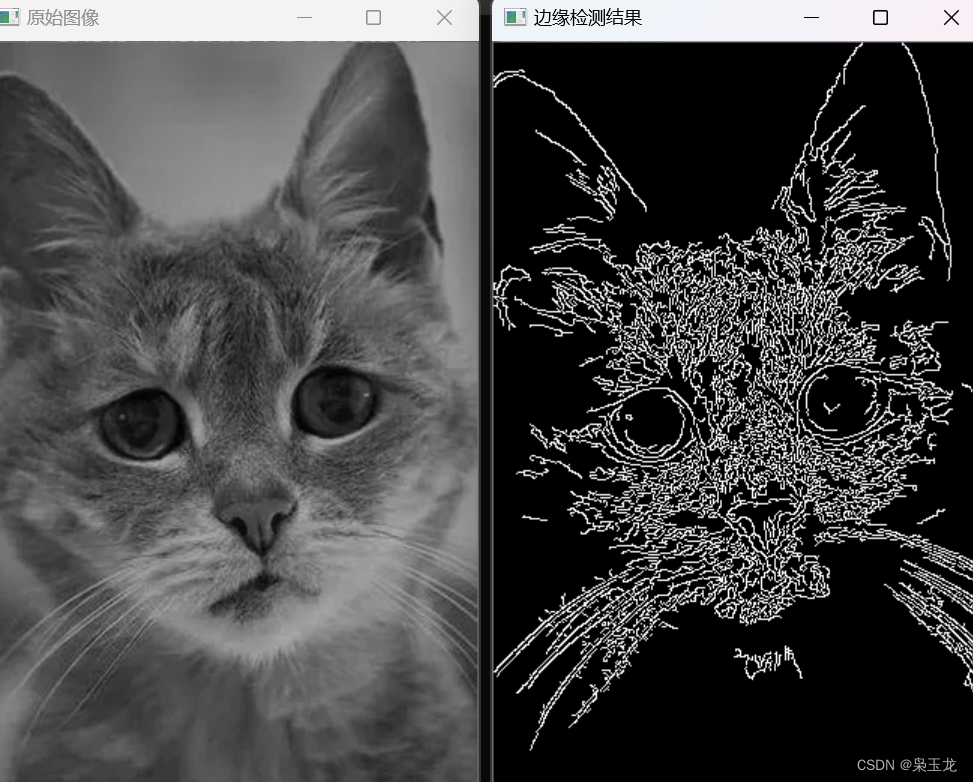
cv::imshow("原始图像", inputImage);
cv::imshow("边缘检测结果", edges);
// 等待用户按下键盘任意键后关闭窗口
cv::waitKey(0);
return 0;
}
使用3×3的内核进行降噪再进行边缘检测案例
#include <opencv2/opencv.hpp>
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
#include <iostream>
#include <fstream>
using namespace cv; //包含cv命名空间
int main() {
// 读取图像
cv::Mat srcImage = cv::imread("1.jpg");//先把图像改成灰色图才能进行边缘的处理
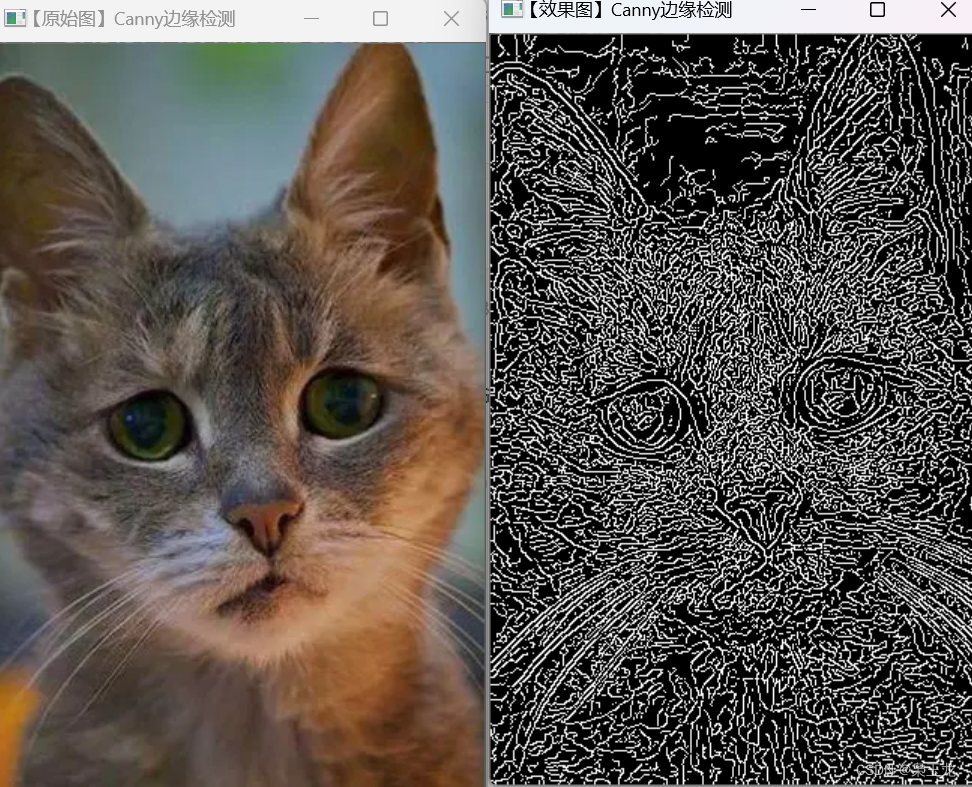
imshow("【原始图】Canny边缘检测", srcImage);
Mat dstImage, edge, grayImage; //参数定义
//【1】创建与 src同类型和大小的矩阵(dst)
dstImage.create(srcImage.size(), srcImage.type());
//【2】将原图像转换为灰度图像
//此句代码的OpenCV2版为:
//cvtColor( srcImage, grayImage, CV_BGR2GRAY )
//此句代码的 OpenCV3版为:
cvtColor(srcImage, grayImage, COLOR_BGR2GRAY);
//【3】先使用 3×3内核来降噪
blur(grayImage, edge, Size(3, 3));
//【4】运行Canny算子
Canny(edge, edge, 3, 9, 3);
//【5】显示效果图
imshow("【效果图】Canny边缘检测", edge);
waitKey(0);
return 0;
}
打开摄像头进行边缘检测
#include <opencv2/opencv.hpp>
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
int main()
{
//从摄像头读入视频
VideoCapture capture(0);
Mat edges;
//循环显示每一帧
while (1)
{
//【1】读入图像
Mat frame;//定义一个 Mat变量,用于存储每一帧的图像
capture >> frame; //读取当前帧
//【2】将原图像转换为灰度图像
cvtColor(frame, edges, CV_BGR2GRAY);//转化 BGR彩色图为灰度图
//【3】使用 3x3内核来降噪(2x3+1=7)
blur(edges, edges, Size(7, 7));//进行模糊
//【4】进行canny边缘检测并显示
Canny(edges, edges, 0, 30, 3);
imshow("被 canny后的视频", edges);//显示经过处理后的当前帧
if (waitKey(30) >= 0) break;//延时30ms
}
return 0;
}









![[GXYCTF2019]BabySQli 1](https://img-blog.csdnimg.cn/d3182910ce494a248e79e57270df61df.png)


![[AFCTF 2018]你能看出这是什么加密么](https://img-blog.csdnimg.cn/841692dd85bb4e3680b4e2e41b2072a4.png)