1、彻底理解I2C的通信时序,不仅仅是记住。
前几章我们学了一种通信协议叫做
UART
异步串行通信,这节课我们要来学习第二种常用的通信协议 I
2
C
。
I
2
C
总线是由
PHILIPS
公司开发的两线式串行总线,多用于连接微处理器及其外围芯片。I
2
C
总线的主要特点是接口方式简单,两条线可以挂多个参与通信的器件,即多机模式,而且任何一个器件都可以作为主机,当然同一时刻只能有一个主机。从原理上来讲,UART
属于异步通信,比如电脑发送给单片机,电脑只负责把数据通过TXD 发送出来即可,接收数据是单片机自己的事情。而
I
2
C
属于同步通信,
SCL
时钟线负责收发双方的时钟节拍,SDA
数据线负责传输数据。
I
2
C
的发送方和接收方都以
SCL
这个时钟 节拍为基准进行数据的发送和接收。从应用上来讲,UART
通信多用于板间通信,比如单片机和电脑,这个设备和另外一个设备之间的通信。而 I
2
C
多用于板内通信,比如单片机和我们本章要学的
EEPROM
之间的通信.
在硬件上,
I
2
C
总线是由时钟总线
SCL
和数据总线
SDA
两条线构成,连接到总线上的所有器件的 SCL
都连到一起,所有
SDA
都连到一起。
I
2
C
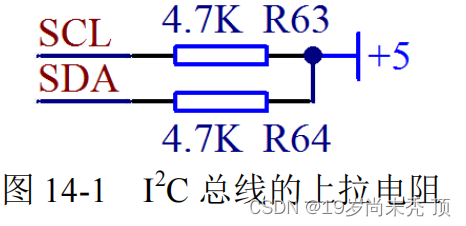
总线是开漏引脚并联的结构,因此我们外部要添加上拉电阻。对于开漏电路外部加上拉电阻,就组成了线“与”的关系。总线上线“与”的关系就是说,所有接入的器件保持高电平,这条线才是高电平,而任何一个器件输出一个低电平,那这条线就会保持低电平,因此可以做到任何一个器件都可以拉低电平,也就是任何一个器件都可以作为主机,如图 14-1
所示,我们添加了
R63
和
R64
两个上拉电阻。
虽然说任何一个设备都可以作为主机,但绝大多数情况下我们都是用单片机来做主机, 而总线上挂的多个器件,每一个都像电话机一样有自己唯一的地址,在信息传输的过程中, 通过这唯一的地址就可以正常识别到属于自己的信息,在 KST-51
开发板上,就挂接了
2
个 I 2
C
设备,一个是
24C02
,一个是
PCF8591
。
我们在学习
UART
串行通信的时候,知道了通信流程分为起始位、数据位、停止位这三 部分,同理在 I
2
C
中也有起始信号、数据传输和停止信号,如图
14-2
所示,
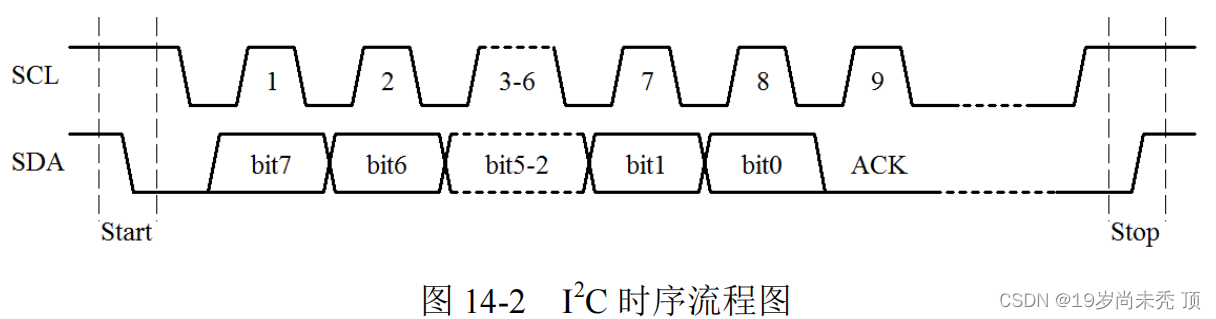
从图上可以看出来,
I
2
C
和
UART
时序流程有相似性,也有一定的区别。
UART
每个字 节中,都有一个起始位、8
个数据位、
1
位停止位。而
I
2
C
分为起始信号、数据传输部分、停 止信号。其中数据传输部分,可以一次通信过程传输很多个字节,字节数是不受限制的,而 每个字节的数据最后也跟了一位,这一位叫做应答位,通常用 ACK
表示,有点类似于
UART 的停止位。
下面我们一部分一部分的把
I
2
C
通信时序进行剖析。之前我们已经学过了
UART
,所以学习 I
2
C
的过程我尽量拿
UART
来作为对比,这样有助于更好的理解。但是有一点大家要理解清楚,就是 UART
通信虽然用了
TXD
和
RXD
两根线,但是实际一次通信中,
1
条线就可 以完成,2
条线是把发送和接收分开而已,而
I
2
C
每次通信,不管是发送还是接收,必须
2条线都参与工作才能完成,为了更方便的看出来每一位的传输流程,我们把图 14-2
改进成图14-3。
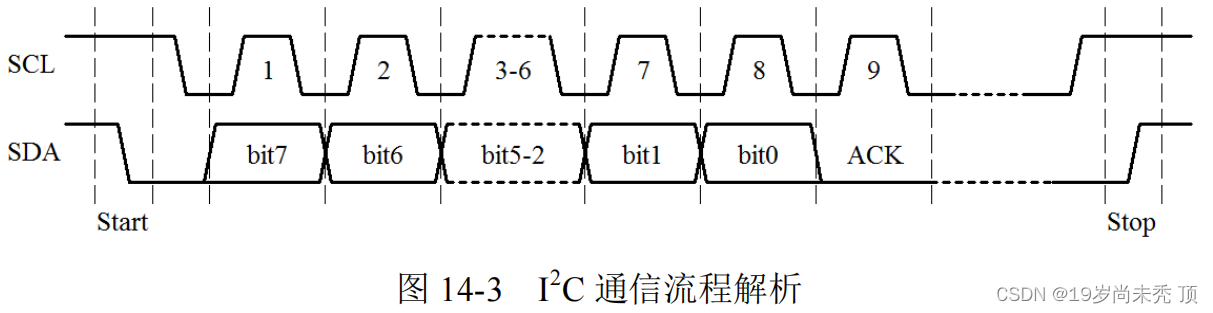
起始信号:
UART
通信是从一直持续的高电平出现一个低电平标志起始位;而
I
2
C
通信的起始信号的定义是 SCL
为高电平期间,
SDA
由高电平向低电平变化产生一个下降沿,表示起始信号,如图 14-3
中的
Start
部分所示。
数据传输:首先,
UART
是低位在前,高位在后;而
I
2
C
通信是高位在前,低位在后。其次,UART
通信数据位是固定长度,波特率分之一,一位一位固定时间发送完毕就可以了。而 I
2
C
没有固定波特率,但是有时序的要求,要求当
SCL
在低电平的时候,
SDA
允许变化,也就是说,发送方必须先保持 SCL
是低电平,才可以改变数据线
SDA
,输出要发送的当前数据的一位;而当 SCL
在高电平的时候,
SDA
绝对不可以变化,因为这个时候,接收方要来读取当前 SDA
的电平信号是
0
还是
1
,因此要保证
SDA
的稳定,如图
14-3
中的每一位数据的变化,都是在 SCL
的低电平位置。
8
位数据位后边跟着的是一位应答位,应答位我们后 边还要具体介绍。
停止信号:
UART
通信的停止位是一位固定的高电平信号;而
I
2
C
通信停止信号的定义 是 SCL
为高电平期间,
SDA
由低电平向高电平变化产生一个上升沿,表示结束信号,如图14-3 中的
Stop
部分所示。
2、能够独立完成EEPROM任意地址的单字节读写、多字节跨页连续写入读出。
存储器件,掉电后数据不丢失
单字节读写
#include <REGX52.H>
extern void InitLcd1602();
extern void LcdShowStr(unsigned char x, unsigned char y, unsigned char *str);
extern void I2CStart();
extern void I2CStop();
extern unsigned char I2CReadNAK();
extern bit I2CWrite(unsigned char dat);
unsigned char E2ReadByte(unsigned char addr);
void E2WriteByte(unsigned char addr, unsigned char dat);
void main()
{
unsigned char dat;
unsigned char str[10];
InitLcd1602();
dat = E2ReadByte(0x02);
str[0] = (dat/100) + '0';
str[1] = (dat/10%10) + '0';
str[2] = (dat%10) + '0';
str[3] = '\0';
LcdShowStr(0, 0, str);
dat++;
E2WriteByte(0x02, dat);
while (1);
}
unsigned char E2ReadByte(unsigned char addr)
{
unsigned char dat;
I2CStart();
I2CWrite(0x50<<1);
I2CWrite(addr);
I2CWrite((0x50<<1)|0x01);
dat = I2CReadNAK();
I2CStop();
return dat;
}
void E2WriteByte(unsigned char addr, unsigned char dat)
{
I2CStart();
I2CWrite(0x50<<1);
I2CWrite(addr);
I2CWrite(dat);
I2CStop();
}1602液晶模块
#include <REGX52.H>
#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;
void LcdWaitReady()
{
unsigned char sta;
LCD1602_DB = 0xff;
LCD1602_RS = 0;
LCD1602_RW = 1;
do{
LCD1602_E = 1;
sta = LCD1602_DB;
LCD1602_E = 0;
}while(sta & 0x80);
}
void LcdWriteCmd(unsigned char cmd)
{
LcdWaitReady();
LCD1602_RS = 0;
LCD1602_RW = 0;
cmd = LCD1602_DB;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdWriteDat(unsigned char dat)
{
LcdWaitReady();
LCD1602_RS = 1;
LCD1602_RW = 0;
dat = LCD1602_DB;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdSetCursor(unsigned char x, unsigned char y)
{
unsigned char addr;
if(y == 0)
addr = 0x00 + x;
else
addr = 0x40 + x;
LcdWriteCmd(addr | 0x80);
}
void LcdShowStr(unsigned char x, unsigned char y, unsigned char *str)
{
LcdSetCursor(x, y);
while(*str != '\0')
{
LcdWriteDat(*str++);
}
}
void InitLcd1602()
{
LcdWriteCmd(0x38);
LcdWriteCmd(0x0C);
LcdWriteCmd(0x06);
LcdWriteCmd(0x01);
}I2C模块
#include <REGX52.H>
#include <intrins.h>
#define I2CDelay() {_nop_();_nop_();_nop_();_nop_();}
sbit I2C_SCL = P3^7;
sbit I2C_SDA = P3^6;
void I2CStart()
{
I2C_SDA = 1;
I2C_SCL = 1;
I2CDelay();
I2C_SDA = 0;
I2CDelay();
I2C_SCL = 0;
}
void I2CStop()
{
I2C_SDA = 0;
I2C_SCL = 0;
I2CDelay();
I2C_SCL = 1;
I2CDelay();
I2C_SDA = 1;
I2CDelay();
}
bit I2CWrite(unsigned char dat)
{
bit ack;
unsigned char mask;
for(mask = 0x80;mask!=0;mask>>=1)
{
if((mask&dat)==0)
I2C_SDA = 0;
else
I2C_SDA = 1;
I2CDelay();
I2C_SCL = 1;
I2CDelay();
I2C_SCL = 0;
}
I2C_SDA = 1;
I2CDelay();
ack = I2C_SDA;
I2CDelay();
I2C_SCL = 0;
return (~ack);
}
unsigned char I2CReadNAK()
{
unsigned char mask;
unsigned char dat;
I2C_SDA = 1;
for(mask=0x80; mask!=0; mask>>=1)
{
I2CDelay();
I2C_SCL = 1;
if(I2C_SDA == 0)
dat &= ~mask;
else
dat |= mask;
I2CDelay();
I2C_SCL = 0;
}
I2C_SDA = 1;
I2CDelay();
I2C_SCL = 1;
I2CDelay();
I2C_SCL = 0;
return dat;
}
unsigned char I2CReadACK()
{
unsigned char mask;
unsigned char dat;
I2C_SDA = 1;
for(mask=0x80; mask!=0; mask>>=1)
{
I2CDelay();
I2C_SCL = 1;
if(I2C_SDA == 0)
dat &= ~mask;
else
dat |= mask;
I2CDelay();
I2C_SCL = 0;
return dat;
}
}多字节读写
#include <REGX52.H>
extern void InitLcd1602();
extern void LcdShowStr(unsigned char x, unsigned char y, unsigned char *str);
extern void I2CStart();
extern void I2CStop();
extern unsigned char I2CReadACK();
extern unsigned char I2CReadNAK();
extern bit I2CWrite(unsigned char dat);
void E2Read(unsigned char *buf, unsigned char addr, unsigned char len);
void E2Write(unsigned char *buf, unsigned char addr, unsigned char len);
void MemToStr(unsigned char *str, unsigned char *src, unsigned char len);
void main()
{
unsigned char i;
unsigned char buf[5];
unsigned char str[20];
InitLcd1602();
E2Read(buf, 0x90, sizeof(buf));
MemToStr(str, buf, sizeof(buf));
LcdShowStr(0, 0, str);
for(i = 0;i < sizeof(buf);i++)
{
buf[i] = buf[i] + 1 + i;
}
E2Write(buf, 0x90, sizeof(buf));
while (1);
}
void MemToStr(unsigned char *str, unsigned char *src, unsigned char len)
{
unsigned char tmp;
while(len--)
{
tmp = *src>>4;
if(tmp <= 9)
*str++ = tmp + '0';
else
*str++ = tmp - 10 +'A';
tmp = *str & 0x0f;
if(tmp <= 9)
*str++ = tmp - 10 - 'A';
*str++ =' ';
src++;
}
*str = '\0';
}
void E2Read(unsigned char *buf, unsigned char addr, unsigned char len)
{
do{
I2CStart();
if (I2CWrite(0x50<<1))
{
break;
}
}while(1);
I2CWrite(addr);
I2CStart();
I2CWrite((0x50<<1)|0x01);
while(len > 1)
{
*buf++ = I2CReadACK();
len--;
}
*buf = I2CReadACK();
I2CStop();
}
void E2Write(unsigned char *buf, unsigned char addr, unsigned char len)
{
while(len--)
{
do{
I2CStart();
if (I2CWrite(0x50<<1))
{
break;
}
I2CStop();
}while(1);
I2CWrite(addr++);
I2CWrite(*buf++);
I2CStop();
}
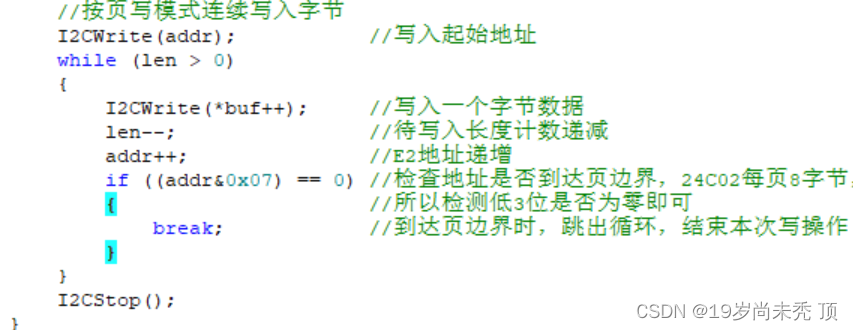
} //按页连续写入
I2CWrite(addr);
while (len > 0)
{
I2CWrite(*buf++);
len--;
addr++;
if ((addr&0x07) == 0)
{
break;
}
}
I2CStop();
}
3、将前边学的交通灯进行改进,用EEPROM保存红灯和绿灯倒计时时间,并且可以通过UART改变红灯和绿灯倒计时时间。
4、使用按键、1602液晶、EEPROM做一个简单的密码锁程序。