十五、红外遥控器
- 介绍
- 基本接收和发送
- 遥控器键码
- 外部中断和外部中断寄存器
- 红外解码
- 中断函数
- 红外遥控
- 电机模块
- 电机调速
介绍
基本接收和发送
- 空闲状态:红外LED不亮,接收头输出高电平
- 发送低电平:红外LED以38KHz闪烁,接收头输出低电平
- 发送高电平:红外LED不亮,接收头输出高电平
遥控器键码

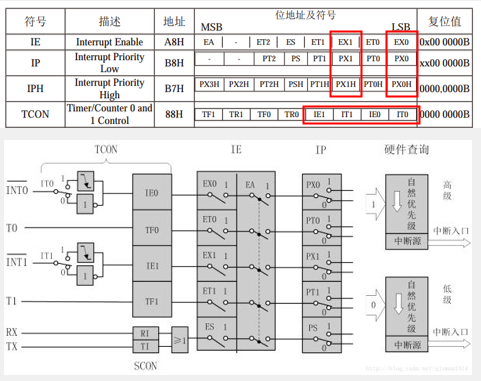
外部中断和外部中断寄存器
低电平或者下降沿触发
红外解码
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"
unsigned int IR_Time;
unsigned char IR_State;
unsigned char IR_Data[4];
unsigned char IR_pData;
unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;
/**
* @brief 红外遥控初始化
* @param 无
* @retval 无
*/
void IR_Init(void)
{
Timer0_Init();
Int0_Init();
}
/**
* @brief 红外遥控获取收到数据帧标志位
* @param 无
* @retval 是否收到数据帧,1为收到,0为未收到
*/
unsigned char IR_GetDataFlag(void)
{
if(IR_DataFlag)
{
IR_DataFlag=0;
return 1;
}
return 0;
}
/**
* @brief 红外遥控获取收到连发帧标志位
* @param 无
* @retval 是否收到连发帧,1为收到,0为未收到
*/
unsigned char IR_GetRepeatFlag(void)
{
if(IR_RepeatFlag)
{
IR_RepeatFlag=0;
return 1;
}
return 0;
}
/**
* @brief 红外遥控获取收到的地址数据
* @param 无
* @retval 收到的地址数据
*/
unsigned char IR_GetAddress(void)
{
return IR_Address;
}
/**
* @brief 红外遥控获取收到的命令数据
* @param 无
* @retval 收到的命令数据
*/
unsigned char IR_GetCommand(void)
{
return IR_Command;
}
//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{
if(IR_State==0) //状态0,空闲状态
{
Timer0_SetCounter(0); //定时计数器清0
Timer0_Run(1); //定时器启动
IR_State=1; //置状态为1
}
else if(IR_State==1) //状态1,等待Start信号或Repeat信号
{
IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间
Timer0_SetCounter(0); //定时计数器清0
//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)
if(IR_Time>13500-500 && IR_Time<13500+500)
{
IR_State=2; //置状态为2
}
//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)
else if(IR_Time>11250-500 && IR_Time<11250+500)
{
IR_RepeatFlag=1; //置收到连发帧标志位为1
Timer0_Run(0); //定时器停止
IR_State=0; //置状态为0
}
else //接收出错
{
IR_State=1; //置状态为1
}
}
else if(IR_State==2) //状态2,接收数据
{
IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间
Timer0_SetCounter(0); //定时计数器清0
//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)
if(IR_Time>1120-500 && IR_Time<1120+500)
{
IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0
IR_pData++; //数据位置指针自增
}
//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)
else if(IR_Time>2250-500 && IR_Time<2250+500)
{
IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1
IR_pData++; //数据位置指针自增
}
else //接收出错
{
IR_pData=0; //数据位置指针清0
IR_State=1; //置状态为1
}
if(IR_pData>=32) //如果接收到了32位数据
{
IR_pData=0; //数据位置指针清0
if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证
{
IR_Address=IR_Data[0]; //转存数据
IR_Command=IR_Data[2];
IR_DataFlag=1; //置收到连发帧标志位为1
}
Timer0_Run(0); //定时器停止
IR_State=0; //置状态为0
}
}
}
中断函数
void Int0_Init(void)
{
IT0=1;
IE0=0;
EX0=1;
EA=1;
PX0=1;
}
红外遥控
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"
unsigned char Num;
unsigned char Address;
unsigned char Command;
void main()
{
LCD_Init();
LCD_ShowString(1,1,"ADDR CMD NUM");
LCD_ShowString(2,1,"00 00 000");
IR_Init();
while(1)
{
if(IR_GetDataFlag() || IR_GetRepeatFlag()) //如果收到数据帧或者收到连发帧
{
Address=IR_GetAddress(); //获取遥控器地址码
Command=IR_GetCommand(); //获取遥控器命令码
LCD_ShowHexNum(2,1,Address,2); //显示遥控器地址码
LCD_ShowHexNum(2,7,Command,2); //显示遥控器命令码
if(Command==IR_VOL_MINUS) //如果遥控器VOL-按键按下
{
Num--; //Num自减
}
if(Command==IR_VOL_ADD) //如果遥控器VOL+按键按下
{
Num++; //Num自增
}
LCD_ShowNum(2,12,Num,3); //显示Num
}
}
}
电机模块
#include <REGX52.H>
#include "Timer1.h"
//引脚定义
sbit Motor=P1^0;
unsigned char Counter,Compare;
/**
* @brief 电机初始化
* @param 无
* @retval 无
*/
void Motor_Init(void)
{
Timer1_Init();
}
/**
* @brief 电机设置速度
* @param Speed 要设置的速度,范围0~100
* @retval 无
*/
void Motor_SetSpeed(unsigned char Speed)
{
Compare=Speed;
}
//定时器1中断函数
void Timer1_Routine() interrupt 3
{
TL1 = 0x9C; //设置定时初值
TH1 = 0xFF; //设置定时初值
Counter++;
Counter%=100; //计数值变化范围限制在0~99
if(Counter<Compare) //计数值小于比较值
{
Motor=1; //输出1
}
else //计数值大于比较值
{
Motor=0; //输出0
}
}
电机调速
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Motor.h"
#include "IR.h"
unsigned char Command,Speed;
void main()
{
Motor_Init();
IR_Init();
while(1)
{
if(IR_GetDataFlag()) //如果收到数据帧
{
Command=IR_GetCommand(); //获取遥控器命令码
if(Command==IR_0){Speed=0;} //根据遥控器命令码设置速度
if(Command==IR_1){Speed=1;}
if(Command==IR_2){Speed=2;}
if(Command==IR_3){Speed=3;}
if(Speed==0){Motor_SetSpeed(0);} //速度输出
if(Speed==1){Motor_SetSpeed(50);}
if(Speed==2){Motor_SetSpeed(75);}
if(Speed==3){Motor_SetSpeed(100);}
}
Nixie(1,Speed); //数码管显示速度
}
}







![[JAVAee]Spring MVC](https://img-blog.csdnimg.cn/77a277bceab04458b147a7ed56057b36.png)