配置流程
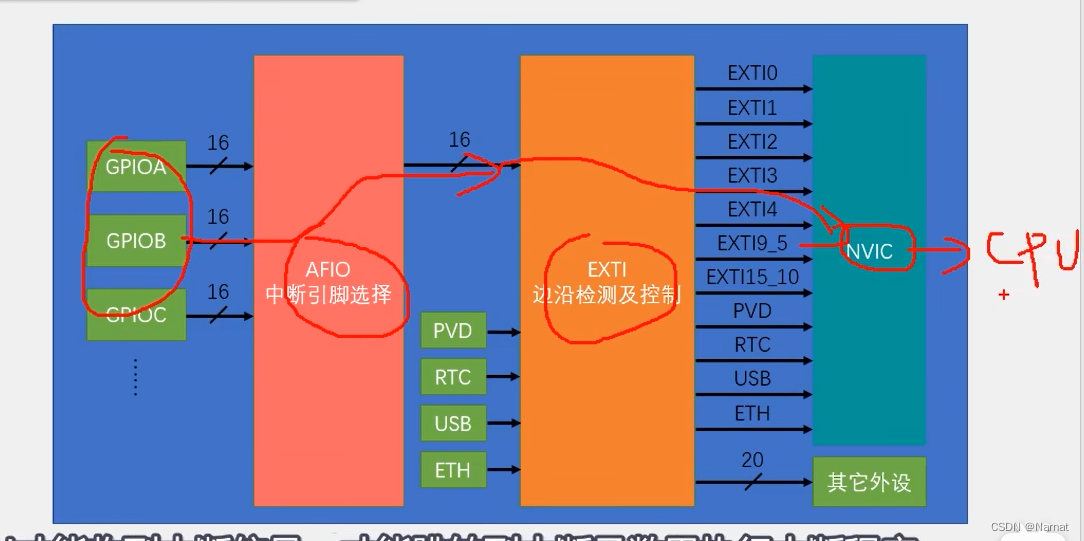
需要对AFIO、EXTI、NVIC、GPIOB进行配置形成通路将中断连接至CPU
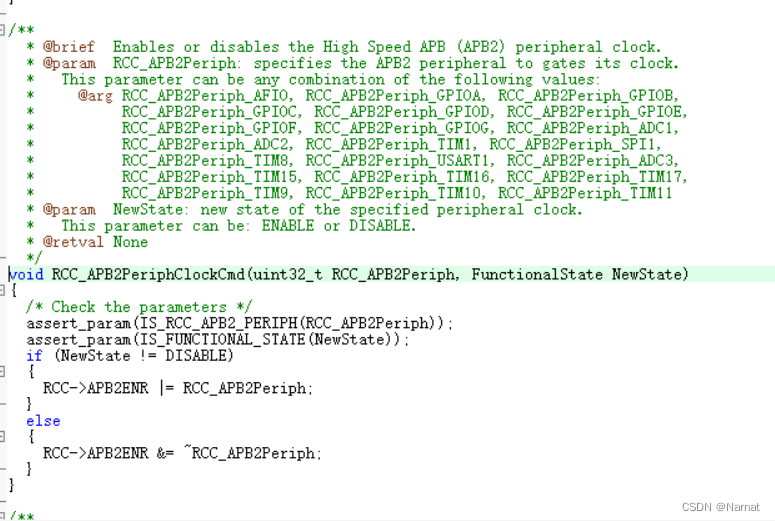
APB2总线连接的寄存器
LED灯代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
GPIO_InitTypeDef GIPO_InitStruct;//结构体配置GPIO
EXTI_InitTypeDef EXTI_Int_Struct;//结构体Exti
NVIC_InitTypeDef NVIC_IniyStruct;
GPIO_InitTypeDef GPIO_InitStructure;//定义变量GPIOA结构体
void CountSensor_Init(void){//配置中断
/*开启APB2的时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//开启APB2的外设,GPIOB是APB2的外设
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//开启AFIO的外设,AFIO是APB2的外设
//EXTI和NVIC外设默认打开不必打开
/*配置GPIO*/
GIPO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式input、out
GIPO_InitStruct.GPIO_Pin = GPIO_Pin_14;//开启14号引脚
GIPO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GIPO_InitStruct);
/*AFIO外外部引脚选择*/
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);//PB14连接
EXTI_Int_Struct.EXTI_Line = EXTI_Line14;//接14
EXTI_Int_Struct.EXTI_LineCmd = ENABLE;//开启
EXTI_Int_Struct.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式
EXTI_Int_Struct.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
EXTI_Init(&EXTI_Int_Struct);//写入
/*将EXTI的14号线路配置为中断模式,下降沿触发,连接在PB14端口*/
//配置Nvic
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置响应等级
NVIC_IniyStruct.NVIC_IRQChannel = EXTI15_10_IRQn;//找到对应通道
NVIC_IniyStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_IniyStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_IniyStruct.NVIC_IRQChannelSubPriority = 1;
//抢占优先级和响应优先级都设置为1
NVIC_Init(&NVIC_IniyStruct);
}
//写中断函数
void GPIOA_INIT(void){//初始化GPIOA代码
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//零号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//输出50HZ
GPIO_Init(GPIOA, &GPIO_InitStructure);//写入
GPIO_SetBits(GPIOA, GPIO_Pin_0);
}
void LED_LIGHT(void){//点亮灯代码
GPIO_ResetBits(GPIOA, GPIO_Pin_0);//指定端口设置为低电平
}
int count = 0;
void EXTI15_10_IRQHandler(void){//名字得写对(10~15)
if(EXTI_GetITStatus(EXTI_Line14) == SET){//查看是否是对应的中断函数
EXTI_ClearITPendingBit(EXTI_Line14);//清除
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
Delay_ms(150);
GPIO_SetBits(GPIOA,GPIO_Pin_0);
}
}
int main(void){
CountSensor_Init();//初始化中断
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//开启PA端口时钟
GPIOA_INIT();//初始化GPIOA代码
while(1){
}
}
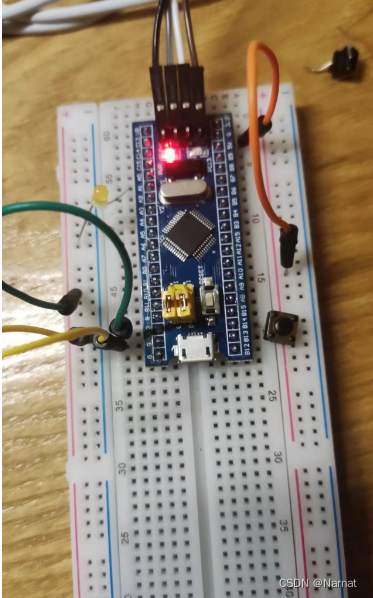
LED灯效果
蜂鸣器代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
GPIO_InitTypeDef GIPO_InitStruct;//结构体配置GPIO
EXTI_InitTypeDef EXTI_Int_Struct;//结构体Exti
NVIC_InitTypeDef NVIC_IniyStruct;
GPIO_InitTypeDef GPIO_InitStructure;//定义变量GPIOA结构体
void CountSensor_Init(void){//配置中断
/*开启APB2的时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//开启APB2的外设,GPIOB是APB2的外设
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//开启AFIO的外设,AFIO是APB2的外设
//EXTI和NVIC外设默认打开不必打开
/*配置GPIO*/
GIPO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式input、out
GIPO_InitStruct.GPIO_Pin = GPIO_Pin_14;//开启14号引脚
GIPO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GIPO_InitStruct);
/*AFIO外外部引脚选择*/
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);//PB14连接
EXTI_Int_Struct.EXTI_Line = EXTI_Line14;//接14
EXTI_Int_Struct.EXTI_LineCmd = ENABLE;//开启
EXTI_Int_Struct.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式
EXTI_Int_Struct.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
EXTI_Init(&EXTI_Int_Struct);//写入
/*将EXTI的14号线路配置为中断模式,下降沿触发,连接在PB14端口*/
//配置Nvic
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置响应等级
NVIC_IniyStruct.NVIC_IRQChannel = EXTI15_10_IRQn;//找到对应通道
NVIC_IniyStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_IniyStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_IniyStruct.NVIC_IRQChannelSubPriority = 1;
//抢占优先级和响应优先级都设置为1
NVIC_Init(&NVIC_IniyStruct);
}
//写中断函数
void GPIOA_INIT(void){//初始化GPIOA代码
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//零号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//输出50HZ
GPIO_Init(GPIOA, &GPIO_InitStructure);//写入
//GPIO_SetBits(GPIOA, GPIO_Pin_0);
}
void LED_LIGHT(void){//点亮灯代码
GPIO_ResetBits(GPIOA, GPIO_Pin_0);//指定端口设置为低电平
}
int count = 0;
void EXTI15_10_IRQHandler(void){//名字得写对(10~15)
if(EXTI_GetITStatus(EXTI_Line14) == SET){//查看是否是对应的中断函数
EXTI_ClearITPendingBit(EXTI_Line14);//清除
GPIO_SetBits(GPIOA,GPIO_Pin_0);
Delay_ms(150);
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
}
}
int main(void){
CountSensor_Init();//初始化中断
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//开启PA端口时钟
GPIOA_INIT();//初始化GPIOA代码
while(1){
}
}
效果

注:GND接负极、VCC正级、I/O接引脚、正电平触发、设置初始电平为0、按下按键电平转1